JP5583477B2 - トータルステーション用ターゲット及びそれを用いた建設用作業機械の制御方法 - Google Patents
トータルステーション用ターゲット及びそれを用いた建設用作業機械の制御方法 Download PDFInfo
- Publication number
- JP5583477B2 JP5583477B2 JP2010118919A JP2010118919A JP5583477B2 JP 5583477 B2 JP5583477 B2 JP 5583477B2 JP 2010118919 A JP2010118919 A JP 2010118919A JP 2010118919 A JP2010118919 A JP 2010118919A JP 5583477 B2 JP5583477 B2 JP 5583477B2
- Authority
- JP
- Japan
- Prior art keywords
- total station
- target
- axis
- tilt
- inclination
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Landscapes
- Road Paving Machines (AREA)
- Operation Control Of Excavators (AREA)
Description
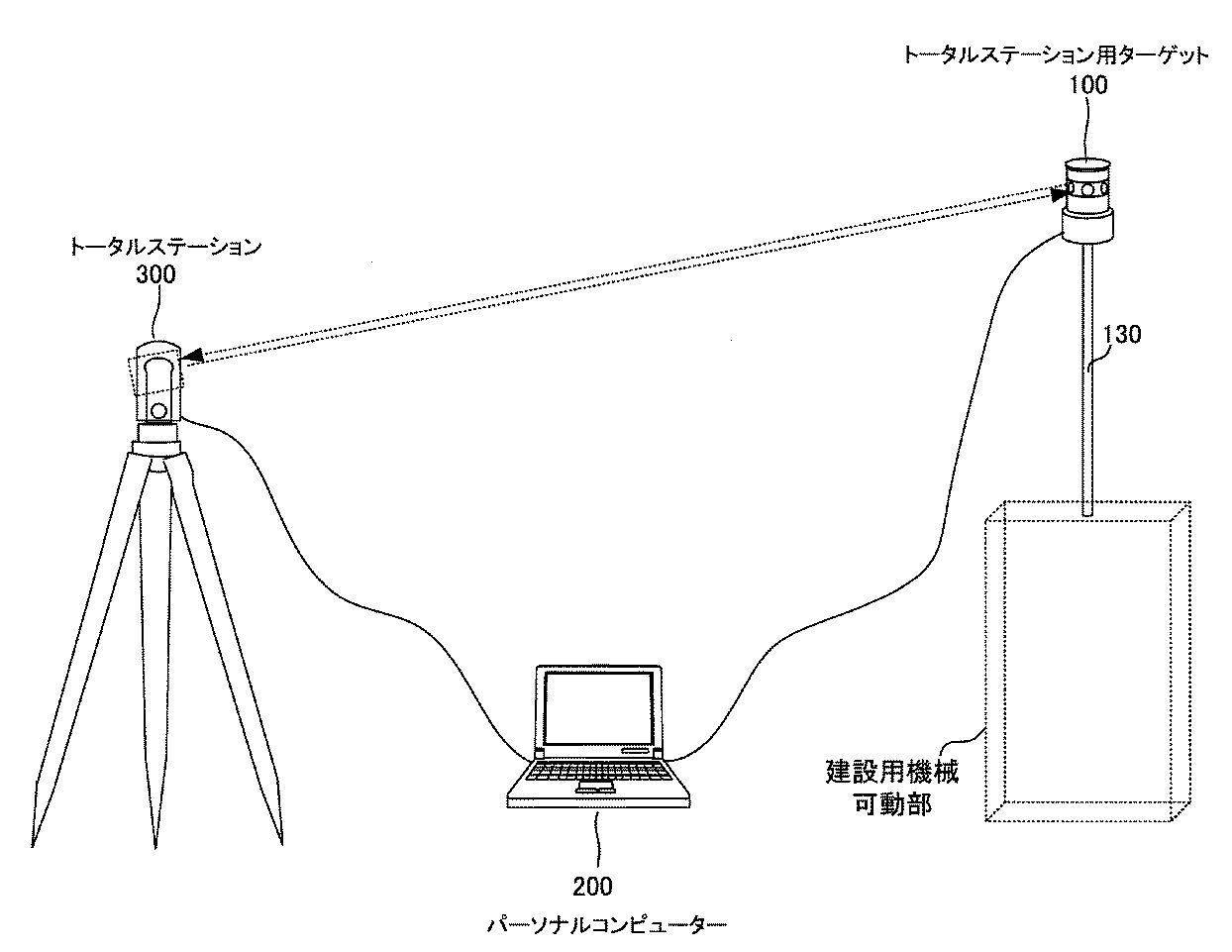
ム構成の概略を示す図である。図1において、100はトータルステーション用ターゲット、200はこのトータルステーション用ターゲット100及びトータルステーション300とデータ通信可能に接続されたパーソナルコンピュータ、300はトータルステーションをそれぞれ示している。
本発明に係るトータルステーション用ターゲット100は、概略、光学部110及び傾斜センサ部120の2つの機能部から構成されている。トータルステーション用ターゲット100の光学部110には、トータルステーション300から射出されるレーザー光を反射するプリズムなどが設けられており、これによりトータルステーション300はプリズムを目標とし、トータルステーション用ターゲット100を自動追尾することができるようになっている。この光学部110は従来の周知のものを適宜利用することが可能である。
がないように固定されると共に、水平面内における前記x軸と直交するy軸の周りの傾き角度(α°)を検出する第2傾斜センサ122とが設けられている。
0で取得され、第1傾斜センサ121によって傾き角度データβ°が、また、第2傾斜センサ122によって傾き角度データα°が検出されたときにおけるポール130先端部における位置座標データ(x’,y’,z’)を算出する方法について説明する。
30の先端部における位置座標データ(x’,y’,z’)を示している。
サ122が検出する傾き角度α°とから、ポール130の先端部における位置座標データ(x’,y’,z’)を求めることができる。同様にして、ポール130が取り付けられた建設用作業機械における可動部の所定位置の位置座標データについても、パーソナルコンピュータ200によって算出することができる。
パーソナルコンピュータ200は、トータルステーション用ターゲット100の出力部123から無線通信によりその傾きデータ(α°、β°)を取得して、排土ブレード413の最下部における所定位置の位置座標データ(x’,y’,z’)を算出することができるようになっている。なお、簡単のために、ポール130が延在する方向に排土ブレード413の最下部が存在するものとする。また、ポール130は、排土ブレード413の上部における、排土ブレード413の幅方向略中央付近に取り付けられている。本例では、トータルステーション用ターゲット100から距離Dのところに、排土ブレード413の最下部における(x’,y’,z’)がくるものとする。また、パーソナルコンピュータ200は、仕上げ面高さデータに係る設計データ210をその記憶手段に有しており、これを参照することができるようになっている。また、パーソナルコンピュータ200からは、ブルドーザー400の通信部410に対して制御指令を送信可能に構成されている。
ット100による排土ブレード413の制御フローチャートの一例を示す図である。このような制御フローチャートは例えばパーソナルコンピュータ200において実行される。
け位置決め用目印140が設けられたトータルステーション用ターゲット100によれば、建設用作業機械の可動部における第1の所定位置と、さらにこれとは異なる第2の所定位置を算出することが容易となる。このことを建設用作業機械としてブルドーザー400を例にとり、その可動部である排土ブレード413にトータルステーション用ターゲット100を取り付ける場合で説明する。なお、以下、図7に示すブルドーザー400と同じものを例にとり説明する。
上記のような適用例によれば、トータルステーション用ターゲット100から距離Dのところにある、排土ブレード413の最下部(x’,y’,z’)が、これまで説明した方法と同様の方法により算出可能であると共に、(x’,y’,z’)から排土ブレード413の幅方向にW移動した点(x’’,y’’,z’’)を第2傾斜センサ122で検出される傾き角度(α°)に基づいて容易に算出することができる。
タを得るために、トータルステーション用ターゲット100rを自動追尾するトータルステーション300rが、また、トータルステーション用ターゲット100lの位置座標(x2,y2,z2)に係るデータを得るために、トータルステーション用ターゲット100
lを自動追尾するトータルステーション300lが設けられ、トータルステーション300r、300lで取得されたデータ(距離、鉛直角度、水平角度)は、パーソナルコンピュータ200に入力され、先の2つの位置座標が演算される。
ド550の最下部の位置座標(x2’,y2’,z2’)が配されるように設定されている
。これにより、式(1)乃至式(7)で説明した算出方法を適用することにより、(x1
’,y1’,z1’)及び(x2’,y2’,z2’)を算出することができる。
る設計データ210をその記憶手段に有しており、これを参照することができるようになっている。また、パーソナルコンピュータ200からは、スリップフォームぺーバー500の通信部502に対して制御指令を送信可能に構成されている。
y1,z1)及び(x2,y2,z2)を演算する。
と傾斜センサ検出情報(αr,βr)とからスクリード550の右端下部の位置情報(x1
’,y1’,z1’)を算出し、トータルステーション300lの位置座標(x2,y2,z2)と傾斜センサ検出情報(αl,βl)とからスクリード550の左端下部の位置情報(
x2’,y2’,z2’)を算出する。このときの算出方法は、これまでに説明したものを
用いることができる。
0fを自動追尾するトータルステーション300fが、また、トータルステーション用ターゲット100rの位置座標(xr,yr,zr)に係るデータを得るために、トータルス
テーション用ターゲット100rを自動追尾するトータルステーション300rが設けられ、トータルステーション300r、300lで取得されたデータ(距離、鉛直角度、水平角度)は、パーソナルコンピュータ200に入力され、2つの位置座標(xf’,yf’,zf’)、(xr’,yr’,zr’)が演算される。演算の方法については、これまで説明した方法と同様のものを用いるようにするため細かい説明は省略する。
110・・・光学部
120・・・傾斜センサ部
121・・・第1傾斜センサ
122・・・第2傾斜センサ
123・・・出力部
130・・・ポール
131・・・連結部
140・・・取り付け位置決め用目印
141・・・第1位置決め用目印
142・・・第2位置決め用目印
200・・・パーソナルコンピュータ
210・・・設計データ
300、300r、300l・・・トータルステーション
400・・・ブルドーザー(建設用作業機械)
410・・・通信部
411・・・ブレード昇降制御部
412・・・ブレード昇降機構部
413・・・排土ブレード(可動部)
500・・・スリップフォームぺーバー(建設用作業機械)
501・・・主制御部
502・・・通信部
510・・・右前クローラー走行部
511・・・右前昇降制御部
512・・・右前昇降機構部
515・・・右前連結部
520・・・左前クローラー走行部
521・・・左前昇降制御部
522・・・左前昇降機構部
525・・・左前連結部
530・・・右後クローラー走行部
531・・・右後昇降制御部
532・・・右後昇降機構部
535・・・右後連結部
540・・・左後クローラー走行部
541・・・左後昇降制御部
542・・・左後昇降機構部
545・・・左後連結部
550・・・スクリード(可動部)
600・・・スリップフォーム装置
605・・・中央連結部
610・・・側方連結部
620・・・型枠(スリップフォーム)
Claims (2)
- トータルステーションから射出されるレーザー光を反射する光学部と、
前記光学部と間の相対位置が変化することがないように固定されると共に、水平面内における第1の軸の周りの傾きを検出する第1の傾斜センサと、
前記光学部と間の相対位置が変化することがないように固定されると共に、水平面内における前記第1の軸と直交する第2の軸の周りの傾きを検出する第2の傾斜センサと、
前記第1の傾斜センサが傾きを検出するときに基準とする軸の方向を示す第1位置決め用目印と、前記第2の傾斜センサが傾きを検出するときに基準とする軸の方向を示す第2位置決め用目印と、を有する天面と、
前記第1の傾斜センサによって検出された第1検出情報と、前記第2の傾斜センサによって検出された第2検出情報とを出力する出力部と、を有することを特徴とするトータルステーション用ターゲット。 - トータルステーションから射出されるレーザー光を反射する光学部と、
前記光学部と間の相対位置が変化することがないように固定されると共に、水平面内における第1の軸の周りの傾きを検出する第1の傾斜センサと、
前記光学部と間の相対位置が変化することがないように固定されると共に、水平面内における前記第1の軸と直交する第2の軸の周りの傾きを検出する第2の傾斜センサと、
前記第1の傾斜センサが傾きを検出するときに基準とする軸の方向を示す第1位置決め用目印と、前記第2の傾斜センサが傾きを検出するときに基準とする軸の方向を示す第2位置決め用目印と、を有する天面と、
前記第1の傾斜センサによって検出された第1検出情報と、前記第2の傾斜センサによって検出された第2検出情報とを出力する出力部と、を有するトータルステーション用ターゲットを、建設用作業機械の可動部に装着し、
トータルステーションによって前記トータルステーション用ターゲットの自動追尾を行い、前記前記トータルステーション用ターゲットの位置情報を取得し、
前記トータルステーション用ターゲットの前記出力部から出力される前記第1検出情報と前記第2検出情報を取得し、
前記位置情報と前前記第1検出情報と前記第2検出情報とから前記可動部における所定箇所の位置座標を算出し、
算出された前記位置座標に基づいて前記可動部の位置制御を行うことを特徴とするトータルステーション用ターゲットを用いた建設用作業機械の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010118919A JP5583477B2 (ja) | 2010-05-25 | 2010-05-25 | トータルステーション用ターゲット及びそれを用いた建設用作業機械の制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010118919A JP5583477B2 (ja) | 2010-05-25 | 2010-05-25 | トータルステーション用ターゲット及びそれを用いた建設用作業機械の制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011247652A JP2011247652A (ja) | 2011-12-08 |
| JP5583477B2 true JP5583477B2 (ja) | 2014-09-03 |
Family
ID=45413103
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010118919A Active JP5583477B2 (ja) | 2010-05-25 | 2010-05-25 | トータルステーション用ターゲット及びそれを用いた建設用作業機械の制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5583477B2 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102768026B (zh) * | 2012-07-23 | 2015-07-29 | 黑龙江科技大学 | 一种叶片全尺寸快速检测的设备 |
| US8989968B2 (en) * | 2012-10-12 | 2015-03-24 | Wirtgen Gmbh | Self-propelled civil engineering machine system with field rover |
| JP2014102118A (ja) * | 2012-11-19 | 2014-06-05 | Tamagawa Seiki Co Ltd | 位置特定システム及びそれを用いての杭打ち位置特定方法 |
| JP2016045002A (ja) * | 2014-08-20 | 2016-04-04 | 株式会社トプコン | 照度測定システム |
| JP6307475B2 (ja) | 2015-07-21 | 2018-04-04 | 株式会社トプコン | 照度測定システム |
| JP2017078688A (ja) * | 2015-10-22 | 2017-04-27 | 株式会社トプコン | 測定装置、測定方法および測定用プログラム |
| JP7029934B2 (ja) * | 2017-11-06 | 2022-03-04 | 前田道路株式会社 | 取付用治具 |
| JP7184998B2 (ja) * | 2017-11-06 | 2022-12-06 | 前田道路株式会社 | 取付用治具 |
| JP7292831B2 (ja) * | 2018-07-13 | 2023-06-19 | 株式会社トプコン | ターゲット装置及び測量システム |
| JP6975114B2 (ja) * | 2018-09-21 | 2021-12-01 | 株式会社日立建機ティエラ | 建設機械 |
| JP7191736B2 (ja) * | 2019-03-11 | 2022-12-19 | 株式会社トプコン | アスファルトフィニッシャ及びスクリード制御方法 |
| JP7083078B2 (ja) * | 2019-03-20 | 2022-06-10 | ヤンマーパワーテクノロジー株式会社 | 建設機械 |
| US12006656B2 (en) | 2019-03-29 | 2024-06-11 | Komatsu Ltd. | Work vehicle, control device for work vehicle, and method for specifying direction of work vehicle |
| JP2022101440A (ja) * | 2020-12-24 | 2022-07-06 | 日本精機株式会社 | 作業支援システム、作業支援システムの検出装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3541960B2 (ja) * | 1993-12-24 | 2004-07-14 | 独立行政法人土木研究所 | 建設機械の3次元位置自動制御方法 |
| JPH0843093A (ja) * | 1994-08-03 | 1996-02-16 | Nishimatsu Constr Co Ltd | 工事途上における工事完了部分及び重機の位置測定方法 |
| US5771978A (en) * | 1996-06-05 | 1998-06-30 | Kabushiki Kaisha Topcon | Grading implement elevation controller with tracking station and reference laser beam |
| JP2001241950A (ja) * | 2000-03-02 | 2001-09-07 | Topcon Corp | ターゲット、測量装置及び測量方法 |
| JP3119253U (ja) * | 2005-12-06 | 2006-02-16 | 有限会社画像計測研究所 | 写真計測用ターゲット、ターゲット貼着用具及び写真計測方法 |
-
2010
- 2010-05-25 JP JP2010118919A patent/JP5583477B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011247652A (ja) | 2011-12-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5583477B2 (ja) | トータルステーション用ターゲット及びそれを用いた建設用作業機械の制御方法 | |
| CN109958036B (zh) | 自推进式建筑机械以及用于控制自推进式建筑机械的方法 | |
| US11313679B2 (en) | Self-propelled civil engineering machine system with field rover | |
| CN100590262C (zh) | 工程机械的控制方法和系统 | |
| CN102220738B (zh) | 铺路机控制装置和方法 | |
| EP2984233B1 (en) | Automatic track alignment control kit and method for automated track alignment | |
| JP5602452B2 (ja) | アスファルトフィニッシャ及びアスファルト舗装の施工法 | |
| CN101688377B (zh) | 建造混凝土或沥青覆层的铺路机用的光学引导系统 | |
| JP2001262611A (ja) | 自走式建設機械を計画されたルートにおいて制御する方法 | |
| CN220132708U (zh) | 建筑机器 | |
| CN115247393B (zh) | 对道路施工过程进行控制的系统和方法 | |
| CN105780634B (zh) | 摊铺厚度测量系统、方法及摊铺机 | |
| US20190316417A1 (en) | Slope Compensation System for Rotary Drill Machines | |
| US12043964B2 (en) | Method of tamping a track in the area for a switch | |
| US20230383486A1 (en) | Self-propelled ground-processing machine and method for controlling a self-propelled ground-processing machine, as well as method for processing the ground with one or more self-propelled ground-processing machines | |
| US20260098966A1 (en) | Reference station setup point | |
| US12612747B2 (en) | Method of paving a road surface and asphalt paving system | |
| JPH04272303A (ja) | 敷均し機械の運転方法 | |
| JP2000046550A (ja) | 自動追尾計測システムの追尾計測装置移動用台車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120913 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130808 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130814 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130927 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140709 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140716 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5583477 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |