JP5583860B2 - 操作入力部を備える挿入装置 - Google Patents
操作入力部を備える挿入装置 Download PDFInfo
- Publication number
- JP5583860B2 JP5583860B2 JP2013545574A JP2013545574A JP5583860B2 JP 5583860 B2 JP5583860 B2 JP 5583860B2 JP 2013545574 A JP2013545574 A JP 2013545574A JP 2013545574 A JP2013545574 A JP 2013545574A JP 5583860 B2 JP5583860 B2 JP 5583860B2
- Authority
- JP
- Japan
- Prior art keywords
- bending
- unit
- input unit
- dial
- operation input
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




















































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/0051—Flexible endoscopes with controlled bending of insertion part
- A61B1/0052—Constructional details of control elements, e.g. handles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00039—Operational features of endoscopes provided with input arrangements for the user
- A61B1/00042—Operational features of endoscopes provided with input arrangements for the user for mechanical operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/0016—Holding or positioning arrangements using motor drive units
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B23/00—Telescopes, e.g. binoculars; Periscopes; Instruments for viewing the inside of hollow bodies; Viewfinders; Optical aiming or sighting devices
- G02B23/24—Instruments or systems for viewing the inside of hollow bodies, e.g. fibrescopes
- G02B23/2476—Non-optical details, e.g. housings, mountings, supports
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Biophysics (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Physics & Mathematics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Mechanical Engineering (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
- Endoscopes (AREA)
Description
一時的に湾曲状態をロックするロックボタンを装備している操作部もあるが、その都度、設定/解除を行わなければならない。
[第1の実施形態]
図1は、本発明の第1の実施形態に係る内視鏡装置の外観構成を示す図である。
内視鏡装置1は、大別すると、先端側を体腔内に挿入する挿入部2と、挿入部2の基端側に連結された、操作部3を含む内視鏡本体4と、内視鏡本体4から延出したライトガイド、信号ケーブル等を含むユニバーサルコード5と、を有している。
湾曲部7内部には、複数の金属製の節輪9が連なるように、長手軸方向に連結されている。具体的には、節輪9間で順次、径方向に90度ずれて、対向する位置に2つの関節を設けて、互いに回転可能に略共軸に連結された湾曲機構である。これらの連結する節輪9には、細線のワイヤなどを筒状に編み込んだ湾曲ブレードが被せられる。さらに、湾曲ブレード上を、柔軟性を有するフッ素ゴム等で形成されるシート状部材により水密に被覆されている。可撓管部8は、フッ素樹脂などでできた可撓性を有する長尺な軟性管である。
図4に示すRL湾曲駆動部17は、駆動力伝達機構とRL湾曲駆動用モータ21と、を有している。駆動力伝達機構は、チェーン15が掛けられたスプロケット16と、スプロケット16とシャフト18で同軸に接続されたウォームホイール19と、ウォームホイール19と噛合するウォームギヤ20を含む。RL湾曲駆動用モータ21は、ウォームギヤ20に連結されている。
図7に示すように、操作入力ユニット22は、操作ダイヤル32と、CCWリードユニット33と、ワッシャ34と、レバー35と、CWリードユニット36と、固定ネジ37と、ポテンショメータ38と、ゴムカバー39とを有している。これらの構成部材が一体的に組み付けられて操作入力ユニット22を構成している。
CCWリードユニット33は、下側のCCW固定板40と、上側のCCWリード板42と、弾性部材としてのバネ43と、ピン44とを有している。これらのうち、CCWリード板42は、CCW方向に渦巻き状の溝41が形成された枠体である。バネ43は、溝41内の一端に取り付けられて収容され、溝41内の所定の範囲に組み込まれる弾性部材として作用する。ピン44は、溝41に沿って摺動し、バネ43に当接する当接部である。
CWリードユニット36は、CCWリードユニット33と同じ構成である。即ち、CWリードユニット36は、下側のCW固定板45と、CW方向に渦巻き状の溝46が形成された上側のCWリード板47と、溝46内に組み込まれたバネ48と、溝46に対して摺動し、バネ48に当接する当接部としてのピン49とを有している。
CCWリードユニット33のバネ43及びピン44と、CWリードユニット36のバネ48及びピン49とは、レバー35に対して対称的に、上下に分けて配置されている。
このような構成であっても、両回転方向に対して、レバー35がバネ48a、48bからの力が及ばない範囲に復帰することができる。
次に、第2の実施形態に係る内視鏡装置について説明する。
図14は、第2の実施形態に係る内視鏡装置の概略的な構成を示すブロック図である。本実施形態の構成部位において、前述した第1の実施形態と同等の構成部位には同じ参照符号を付して、その詳細な説明は省略する。
モータ53a,53bは、ユニバーサルコード5内の電気ケーブルの先端から不図示のRL湾曲コントローラに接続される。さらに、RL操作の入力ユニット22もまた、ユニバーサルコード5によりRL湾曲コントローラに接続される。
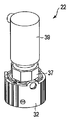
次に、第2の実施形態に係る内視鏡本体の操作ダイヤルの第1の変形例について説明する。図15Aに示す操作部3の例では、操作部3の側面上に星形のUD操作ダイヤル14が設けられ、その上面中心に、左右方向に湾曲作動させるための円筒形状のRL操作を行う操作ダイヤル55が取り付けられている。この操作ダイヤル55は、操作入力ユニット61のダイヤルカバー73に相当し、操作部3の筐体に取り付けられて、筐体内部にポテンショメータ62が収納された形態で取り付けられている。
図16は、操作入力ユニット61の外観構成を示し、図17は、ケースを外した状態の操作入力ユニット61の内部構成を示す図である。図18は、操作入力ユニット61の組み立て構成を示す図である。
このように構成された操作入力ユニット61は、ダイヤル部63が外部に露出するように操作部3の筐体に開けられた取り付け穴にSTナットを嵌め込み固定して、筐体内部にポテンショメータ62が収納された状態に装着する。尚、STナット66を筐体に取り付ける場合には、水密となるように、例えば、パッキン等を介在させて固定する。また、ダイヤルカバー73は、図15Bに示すように、操作ダイヤル55であってもよい。
操作者により回転されたダイヤル部63の保持位置は、後述するコイルバネの弾性力やOリング67のカバー内面への押圧(摺動抵抗力又は摩擦係数)等を調整して設定された以下に説明する中立復帰特性により規定することができる。
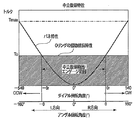
図19に示すバネ特性は、本実施形態で使用した弾性部材であるコイルバネ69によって生じる弾性力であり、ダイヤル部63に作用する。このバネ特性は、ダイヤル部63の中立位置の回転トルクTを0(又は0の近傍)とし、最大アングルの回転トルクTを±Tmaxとする線形的なV字形状を成している。また、回転抵抗力Toは、Oリング67の摺動抵抗特性として示し、具体的には、Oリング67とカバー内面との摺動抵抗であり、一定値となる。
反対に、ダイヤル回転角度±θrの時の湾曲部7におけるアングル回転角度±θとして、−Tmax〜−θr及びθr〜Tmaxに相当する回転角度範囲を中立復帰範囲(エンゲージフリー範囲)とする。
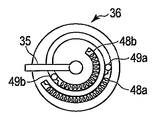
図20は、第3の実施形態に係る内視鏡本体の操作入力ユニットの外観構成を示し、図21は、操作入力ユニット81の組み立て構成を示す図である。
本実施形態の操作入力ユニット81は、ダイヤル部63に作用するトルクを前述したコイルバネに替わって、2つの渦巻きバネ87,89による弾性力を利用した構成である。
ダイヤル部84は、第2の実施形態と同様に、復帰力発生部と回転抵抗発生部と、で構成される。
取り付け用ナット86は、外形が多角形、例えば八角形を成し、断面が凸形状である。さらに、ナット中央には、ポテンショメータ82の出力軸83を嵌装し、出力軸23を貫通させるための貫通孔が形成される。その貫通孔の内周面には、環状に溝が形成され、Oリング91が嵌め込まれている。この溝は、Oリング91が嵌め込まれた際に、Oリング91の太さφの径の半分程度が露出するように、溝の深さが調整されて形成されている。
筒型キャップ85は、操作ダイヤルの機能も有し、後述するように組み付けた巻きバネ87と固定盤88と渦巻きバネ29とを収容し、回転盤90が宛がわれ、ネジ止めされる。
図23は、操作入力ユニットのバネ特性と回転抵抗特性によるエンゲージ範囲と中立復帰範囲を示している。ここで、横軸は、回転による筒型キャップ85の回転角度及び、回転角度と相対的な湾曲部の湾曲状態のアングル回転角度を示し、縦軸は筒型キャップ85に作用する回転トルクを示している。
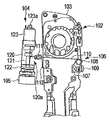
図24は、第4の実施形態に係る操作部を含む概念的な電動湾曲内視鏡システムの構成を示す図である。尚、以下の説明において、操作部3は、長方体形状を成しており、UD操作ダイヤルが配置された面を正面とし、その対向面で手のひらが当接する面を裏面とし、ユニバーサルケーブル5が連結される面を第1側面とし、操作入力ユニット101が配置された面を第2側面とする。さらに、グリップ部23が連結する側を基端部又は下部とし、その対向する側を上部(又は、上面)とする。本実施形態の内視鏡装置は、生体等の管孔内や体腔内を観察対象とする医療用の内視鏡装置と、配管内やエンジン等の内部状態を観察する工業用の内視鏡装置とに適用する。
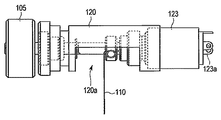
制御部は、後述する操作入力ユニット101の操作ダイヤル105(入力操作部位4)の回転操作(移動位置)に応じた、湾曲部7を湾曲させる指示信号をモータ駆動電源部に送出して、モータ31を駆動して湾曲動作を行う。
入力操作部位104は、操作子本体114と、ブラケット120とで構成されている。
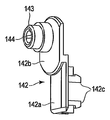
図29Aは、中立復帰機構102の上方向から見た外観構成を示す図であり、図29Bは、中立復帰機構102の側方向から見た外観構成を示す図である。図30Aは、操作ダイヤル5が中立位置付近で、ワイヤ110の弛みを抑えている中立復帰機構102の状態を示す図であり、図30Bは、操作ダイヤル105にブレーキ力が作用し、中立位置を中心とするエンゲージ範囲(角度)内にある中立復帰機構2が復帰しない状態を示す図であり、図30Cは、操作ダイヤル105を回転させて、ブレーキ力を越えた弾性力(付勢力)が作用し、中立復帰機構102が復帰する状態を示す図である。
連結機構106は、入力操作部位104と中立復帰機構102とを連結する部材である。具体的には、ワイヤ固定リング125とワイヤ止め126との間を連結させるワイヤ110と、ワイヤ110の牽引方向を方向転換する方向転換部107,112とで構成される。本実施形態の連結機構106は、入力操作部位104と中立復帰機構102とを基板103の両側に配置しているため、それぞれの牽引方向が合うように方向転換するユニットである。
次に、第5の実施形態について説明する。
図31は、第5の実施形態のブレーキ機構を搭載する入力ユニットが概念的な構成を示す図である。図32Aは、ブレーキ機構を正面側から見た図、図32Bは、ブレーキ機構を側方から見た図、図32Cは、ブレーキ機構を斜め上から見た図、図32Dは、ブレーキ機構を下斜めから見た図、図32Eは、ブレーキ機構を裏面側から見た図である。本実施形態は、前述した第1の実施形態の入力ユニットにおけるブレーキ機構の構成が異なっており、これ以外の構成は、同等である。
次に、第6の実施形態について説明する。
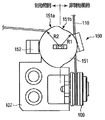
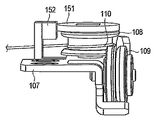
図33Aは、第6の実施形態のブレーキ機構を正面側から見た図、図33Bは、ブレーキ機構を側方から見た図である。前述した第5の実施形態では、プーリに摺動部材を当接させて制動する構成であったが、本実施形態のブレーキ機構150は、プーリ108と一体化されたカム151の側面に摺動部材152を押し当てて制動する構成である。
第6の実施形態のブレーキ機構150は、プーリ108のフランジ面に固定された円板形状のブレーキカムプレート151と、ブレーキカムプレート151の側面に押し当てて制動する摺動部材152とで構成される。ブレーキカムプレート151は、半円ずつに異なる半径R1、R2(R1<R2)を有する円板形状を成している。半径R1の外周面を制動側面151aとし、半径R2の外周面を非制動側面151bとする。
以上説明したように、本実施形態の入力ユニットによれば、前述した第4の実施形態の作用効果に加えて、簡易なブレーキ機構の構成でブレーキ力を発生することが可能である。
次に、第7の実施形態について説明する。
図34Aは、第4の実施形態の操作部内に設けられたブレーキ機構を正面側から見た図、図34Bは、ブレーキ機構の詳細な構成を示す図である。本実施形態は、前述した第4の実施形態の入力ユニットにおけるブレーキ機構の構成が異なっており、これ以外の構成は同等である。
図34Aに示すように、本実施形態のブレーキ機構155は、基板103上に配置された摺動部材156と、摺動部材156と摺動するワイヤ110に嵌め込まれた環状の制動部材157と、により構成される。
次に、第8の実施形態について説明する。
図35Aは、第5の実施形態の操作部内に設けられたブレーキ機構を正面側から見た図、図35Bは、ブレーキ機構の詳細な構成を示す図である。本実施形態は、前述した第4の実施形態の入力ユニットにおけるブレーキ機構の構成が異なっており、これ以外の構成は同等である。
次に、第9の実施形態について説明する。
図36Aは、第9の実施形態の操作部内に設けられた中立復帰機構の概念的な構成を示す図、図36Bは、操作ダイヤルをm方向に回転させた場合の弾性部材の状態を示す図、図36Cは、操作ダイヤルをn方向に回転させた場合の弾性部材の状態を示す図である。本実施形態は、前述した第4の実施形態の入力ユニットにおける中立復帰機構の構成が異なっており、これ以外の構成は同等である。
以上説明したように本実施形態の入力ユニットは、ワイヤ110により、左右から同じ張力により引っ張られているため、軸にワイヤを巻き付ける構造よりも軸を支持する構造が簡易にすることができる。
図37は、第10の実施形態の操作部内に設けられた中立復帰機構の概念的な構成を示す図である。本実施形態の操作子本体181は、貫通する出力軸が備えられた両軸受けのポテンショメータ123において、出力軸の一端に操作ダイヤル105を取り付け、他端にワイヤ110のワイヤ固定具184を取り付けている。ワイヤ110の一端は、ワイヤ固定具184に固定される。そのワイヤ110の他端は、プーリ183により、方向が出力軸の延伸方向に変換されて、操作ダイヤル105側に向かい、中立復帰機構182に連結される。中立復帰機構182は、第4の実施形態の中立復帰機構102と同様の構成を有し、前述した基板103、操作部筐体又は入力操作部位104のブラケット120に固定されている。
本実施形態によれば、第4の実施形態による作用効果に加えて、構造が簡略化し、さらに小型化を実現できる。
図38は、第11の実施形態の操作部内に設けられた中立復帰機構の概念的な構成を示す図である。本実施形態の操作子本体185は、ポテンショメータ123の出力軸の先端に操作ダイヤル105を取り付け、出力軸にワイヤ固定具を取り付けて、ワイヤ110の一端を固定する。そのワイヤ110の他端は、タイコローラ187により方向が出力軸の延伸方向に変換されて、ポテンショメータ123へ向かい、中立復帰機構186に連結される。中立復帰機構186は、第4の実施形態の中立復帰機構102と同様の構成を有し、前述した基板103、操作部筐体又は入力操作部位104のブラケット120に固定されている。
本実施形態によれば、第4の実施形態による作用効果に加えて、入力ユニットの構造が簡略化し、さらに小型化を実現できる。
図39は、第12の実施形態の操作部内に設けられた中立復帰機構の概念的な構成を示す図である。本実施形態の操作子本体190は、ポテンショメータ123の出力軸の先端に操作ダイヤル105が取り付けられる。ポテンショメータ123の両側後方に配置された、2つの中立復帰機構191,192に固定されたワイヤ110が延出して、出力軸に八の字状に巻き付かせている。2つの中立復帰機構191,192は、第4の実施形態の中立復帰機構102と同様の構成を有する。
本実施形態によれば、第4の実施形態による作用効果に加えて、構造が簡略化し、さらに小型化を実現できる。
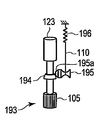
図40は、第13の実施形態の操作部内に設けられた中立復帰機構の概念的な構成を示す図である。本実施形態の操作子本体193は、ポテンショメータ123の出力軸の先端に操作ダイヤル105が取り付けられる。ポテンショメータ123の出力軸の途中に傘歯車194を嵌装し、その傘歯車194に歯合する傘歯車195aを一体的に有するワイヤ固定ローラ195を設けている。このワイヤ固定ローラ195にワイヤ110の一端が固定されて、出力軸方向に延伸し、その他端が中立復帰機構196に繋がれている。中立復帰機構196は第4の実施形態の中立復帰機構102と同様の構成を有する。
本実施形態によれば、第4の実施形態による作用効果に加えて、入力ユニットの構造が簡略化し、さらに小型化を実現できる。
図41は、第14の実施形態の操作部の入力ユニットの入力操作部位197の概念的な構成を示す図である。
前述した第4の実施形態においては、ポテンショメータ123の出力軸の先端と、操作ダイヤル105から延出する操作軸の先端とは、それぞれに設けられた凹凸を嵌合させて連結していた。この構成の場合、操作ダイヤルの回転操作における出力軸と操作軸とは、一体的に一対一で回転することとなる。
本実施形態によれば、中立復帰機構の小型化を図ることにより、入力ユニットの小型化及び軽量化を実現できる。特に、本実施形態では、操作部内で入力操作部位と中立復帰機構を離間して配置する構成であるため、中立復帰機構の小型化を図ることで、配置スペースが狭い場合であってもより配置しやすくなる。尚、前述した第4乃至第11の実施形態では、伸び率の低いワイヤ110を適用した例について説明したが、反対に、弾性を有する樹脂製ワイヤ、例えば、ナイロン(登録商標)製ワイヤを適用して、中立復帰機構内のバネのストロークを短くすることも可能である。
次に、第15の実施形態について説明する。
図42Aは、第12の実施形態の操作部内に設けられたブレーキ機構の概念的な構成を示す図、図42Bは、操作ダイヤルを回転させた場合の復帰範囲を示す図、図42Cは、図42AのA−A断面を示す図である。本実施形態は、前述した第4の実施形態の入力ユニットにおけるブレーキ機構の構成が異なっており、これ以外の構成は同等である。
(1)第1の方向に湾曲可能な湾曲部と、
長手軸を有する長方形状を成すグリップ部と、
前記グリップに連結され、前記湾曲部を前記第1の方向に湾曲させる第1の湾曲機構部が内蔵される湾曲ユニットと、
前記グリップ又は前記湾曲ユニットに連結され、前記長手軸と略垂直な方向へ移動可能な前記湾曲部を操作する操作入力が入力される入力部を有する入力ユニットと、
前記第1の湾曲機構部に連結され、前記湾曲部を湾曲駆動させる駆動力を発生するパワーユニットと、
前記操作入力の入力量に基づき前記湾曲部を湾曲制御する制御信号を前記パワーユニットに対して出力するコントロールユニットと、
前記入力部とともに移動可能に係合する係合部と、前記入力部によって牽引されると前記入力部の移動方向とは逆方向に前記入力部を牽引する力を発生する力発生部と、
前記入力ユニットから離間した位置に設けられ、前記力発生ユニットの一部を前記グリップ又は前記湾曲ユニットに対して固定する固定部を有する力発生ユニットと、
を有する挿入装置。
(3)前記湾曲部は、前記第1の方向と略直交する第2の方向に湾曲可能であり、
前記湾曲ユニットは、第1の回転軸を有し前記湾曲部を前記第2の方向に湾曲させる操作入力が入力されるダイヤルを有し、
前記湾曲ユニットは、前記ダイヤルが前記第1の回転軸回りに回転するとともに前記湾曲部を前記第2の方向に湾曲させる第2の湾曲機構部を有する前記(2)項に記載の挿入装置。
前記コントロールユニットは、前記入力量として前記第2の回転軸の回転量を検出する前記(2)項に記載の挿入装置。
(6)前記力発生部は、可撹性を有し、長尺で弾性を有するワイヤを備え、
前記係合部と前記固定部との間で張られた前記(1)項に記載の挿入装置。
可撓性を有する長尺なワイヤと、前記ワイヤの一端に接続される第1のバネと、前記ワイヤの他端に接続される第2のバネを有し、
前記固定部は、前記第1のバネを前記グリップ又は前記湾曲ユニットに対して固定する第1の固定部と、
前記第2のバネを前記グリップ又は前記湾曲ユニットに対して固定する第2の固定部を有し、
前記力発生ユニットは、前記ワイヤの中間部が前記第2の回転軸に巻回された前記(1)項に記載の挿入装置。
(8)前記ワイヤの経路を規定する経路規定部と、
前記経路規定部若しくは前記ワイヤに対して、摺動抵抗を付加する抵抗付加部と、
を有する前記(5)項乃至前記(7)項に記載の挿入装置。
(10)前記所定の湾曲量は、前記湾曲部の最大湾曲角度よりも小さい前記(9)項に記載の挿入装置。
(11)前記所定の湾曲角度は、70度以下である前記(9)項に記載の挿入装置。
前記挿入部の基端側に設けられ、前記湾曲部を湾曲させる指示を回転操作により入力する湾曲操作入力部を有する操作部と、を具備し、
前記湾曲操作入力部は、
前記湾曲操作入力部の枠体に一端が取り付けられた弾性部材と、
前記弾性部材の他端側に配置された当接部と、
回転操作入力に応じて移動して前記当接部と当接し、前記弾性部材を圧縮する作用部とを有し、
前記作用部の移動量を前記湾曲部の一軸方向への湾曲操作入力量に対応させ、
前記作用部が前記当接部と当接して前記弾性部材を圧縮した状態で、前記湾曲操作入力部への回転操作入力を止めた後、前記作用部は、前記弾性部材による弾性力が非作用の範囲に戻ることを特徴とする内視鏡装置。
前記作用部が、前記弾性力が非作用の範囲にあるとき、前記湾曲部は、前記一軸方向に湾曲した状態を含んでいることを特徴とする(12)に記載の内視鏡装置。
前記作用部が、前記弾性力が作用しない範囲にあるとき、前記湾曲部は、前記一軸方向に湾曲していないことを特徴とする請求項(12)に記載の内視鏡装置。
前記弾性部材は、前記湾曲部を左方向に湾曲させる左方向湾曲用弾性部材及び左方向湾曲用当接部を有し、前記当接部は、前記湾曲部を右方向に湾曲させる右方向湾曲用弾性部材及び右方向湾曲用当接部を有し、
前記左方向湾曲用弾性部材及び左方向湾曲用当接部と、前記右方向湾曲用弾性部材及び右方向湾曲用当接部材とが、前記作用部に対して上下に分けて配置されていることを特徴とする請求項(12)に記載の内視鏡装置。
Claims (8)
- 挿入部に設けられ、直線状態と最大湾曲角度に湾曲している状態との間で湾曲可能な湾曲部と、
操作者が前記湾曲部を操作するための操作入力部と、
前記操作入力部の操作に応じて前記湾曲部を湾曲させるために作動する操作入力ユニットと、
前記操作入力部に設けられ、前記操作入力部に連動して移動可能な係止部材と、前記係止部材に当接し、前記係止部材が移動したときに前記係止部材との間に抵抗力を発生させる抵抗力発生部材と、を有する抵抗力発生部と、
弾性部材を有し、前記湾曲部を前記直線状態から湾曲させるにつれて前記弾性部材を変形させ、前記操作入力ユニットの作動に応じて前記湾曲部が所定の角度以上に湾曲した場合には前記抵抗力よりも大きい前記弾性部材の復帰力を発生させ、前記湾曲部が所定の角度未満に湾曲した場合には前記抵抗力よりも小さい前記弾性部材の復帰力を発生させる復帰力発生部と、を具備することを特徴とする挿入装置。 - 前記操作入力部は、回転可能なダイヤル部を備え、
前記操作入力ユニットは、前記ダイヤル部を軸支する軸と、前記操作入力ユニットにおいて前記軸を回転可能に保持する軸保持部と、を有する請求項1に記載の挿入装置。 - 前記弾性部材は、前記軸に対して前記復帰力を発生させる請求項2に記載の挿入装置。
- 前記軸保持部は、前記軸を挿通可能な貫通孔によって前記軸を回転可能に保持し、
前記抵抗力発生部材は、前記貫通孔内に設けられ、前記軸の周面に摺動して接するリング部材により形成される請求項3に記載の挿入装置。 - 前記湾曲部を湾曲動作させる駆動力を発生させる駆動ユニットと、
前記湾曲部内に配置され、前記駆動力に基づき、前記湾曲部を湾曲させる湾曲機構と、
をさらに具備し、
前記操作入力部は、前記湾曲部の湾曲角度と関連付けた回転角度を回転操作で入力する請求項1に記載の挿入装置。 - 前記操作入力ユニットに設けられ、前記軸の回転角度を検知する回転角度検知部と、
前記回転角度検知部によって検知された回転角度に基づき、前記湾曲部を湾曲させる指示信号を前記駆動ユニットに出力する制御部と、
をさらに具備する請求項5に記載の挿入装置。 - 前記操作入力ユニットが設置される操作部をさらに具備し、
前記駆動ユニットは、前記湾曲部をRL方向に湾曲動作させるように構成され、
前記操作入力部は、前記操作部から突設されている請求項5に記載の挿入装置。 - 挿入部に設けられ、直線状態と最大湾曲角度に湾曲している状態との間で湾曲可能な湾曲部と、
操作者が操作し、操作に応じて前記湾曲部を湾曲させるために作動する操作入力ユニットと、
弾性部材を有し、前記弾性部材が弾性力による復帰力を発生させる復帰力発生部と、
前記操作入力ユニットに設けられ、前記操作入力ユニットの作動に応じて前記湾曲部が所定の角度以上に湾曲した場合には前記弾性部材と当接して前記弾性部材を圧縮し、前記湾曲部が所定の角度未満に湾曲した場合には前記弾性部材と離間した状態に配置される作用部と、
を具備する挿入装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013545574A JP5583860B2 (ja) | 2012-02-27 | 2013-02-27 | 操作入力部を備える挿入装置 |
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012040407 | 2012-02-27 | ||
| JP2012040407 | 2012-02-27 | ||
| JP2012241745 | 2012-11-01 | ||
| JP2012241745 | 2012-11-01 | ||
| JP2013545574A JP5583860B2 (ja) | 2012-02-27 | 2013-02-27 | 操作入力部を備える挿入装置 |
| PCT/JP2013/055186 WO2013129494A1 (ja) | 2012-02-27 | 2013-02-27 | 操作入力部を備える挿入装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP5583860B2 true JP5583860B2 (ja) | 2014-09-03 |
| JPWO2013129494A1 JPWO2013129494A1 (ja) | 2015-07-30 |
Family
ID=49082688
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013545574A Active JP5583860B2 (ja) | 2012-02-27 | 2013-02-27 | 操作入力部を備える挿入装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9237837B2 (ja) |
| EP (1) | EP2821000A4 (ja) |
| JP (1) | JP5583860B2 (ja) |
| CN (1) | CN104135907B (ja) |
| WO (1) | WO2013129494A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10143361B2 (en) | 2014-12-19 | 2018-12-04 | Olympus Corporation | Endoscope system having rotatable elongated part and bending part controlled to bend based on rotation of elongated part |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9955994B2 (en) | 2002-08-02 | 2018-05-01 | Flowcardia, Inc. | Ultrasound catheter having protective feature against breakage |
| US7604608B2 (en) * | 2003-01-14 | 2009-10-20 | Flowcardia, Inc. | Ultrasound catheter and methods for making and using same |
| US7335180B2 (en) | 2003-11-24 | 2008-02-26 | Flowcardia, Inc. | Steerable ultrasound catheter |
| US7758510B2 (en) | 2003-09-19 | 2010-07-20 | Flowcardia, Inc. | Connector for securing ultrasound catheter to transducer |
| WO2013108776A1 (ja) * | 2012-01-16 | 2013-07-25 | オリンパスメディカルシステムズ株式会社 | 挿入装置 |
| WO2013141216A1 (ja) * | 2012-03-23 | 2013-09-26 | オリンパスメディカルシステムズ株式会社 | 挿入装置 |
| EP2879596A2 (en) | 2012-08-02 | 2015-06-10 | Flowcardia, Inc. | Ultrasound catheter system |
| JP5792414B2 (ja) * | 2013-06-18 | 2015-10-14 | オリンパス株式会社 | 導入装置、内視鏡装置 |
| WO2015050062A1 (ja) | 2013-10-02 | 2015-04-09 | オリンパスメディカルシステムズ株式会社 | 導入装置 |
| JP5826979B2 (ja) * | 2013-11-20 | 2015-12-02 | オリンパス株式会社 | 挿入機器及びその挿入機器を備えた挿入装置 |
| WO2016075992A1 (ja) * | 2014-11-12 | 2016-05-19 | オリンパス株式会社 | ダイヤルユニットおよび導入装置 |
| EP3178371A4 (en) | 2015-01-09 | 2018-05-02 | Olympus Corporation | Endoscope operation mechanism and endoscope |
| EP3344110B1 (en) * | 2015-09-01 | 2025-01-29 | DEKA Products Limited Partnership | Endoscope with pannable camera |
| JPWO2017216835A1 (ja) * | 2016-06-13 | 2019-04-04 | オリンパス株式会社 | 医療用デバイス |
| US20180140321A1 (en) | 2016-11-23 | 2018-05-24 | C. R. Bard, Inc. | Catheter With Retractable Sheath And Methods Thereof |
| US11596726B2 (en) | 2016-12-17 | 2023-03-07 | C.R. Bard, Inc. | Ultrasound devices for removing clots from catheters and related methods |
| US10582983B2 (en) | 2017-02-06 | 2020-03-10 | C. R. Bard, Inc. | Ultrasonic endovascular catheter with a controllable sheath |
| US10433717B1 (en) * | 2018-06-28 | 2019-10-08 | Meditrina, Inc. | Endoscope having size-adjustable working channel |
| JP7064012B2 (ja) | 2018-10-01 | 2022-05-09 | オリンパス株式会社 | 内視鏡 |
| JP7061585B2 (ja) * | 2019-03-20 | 2022-04-28 | 富士フイルム株式会社 | 内視鏡 |
| CN109875489A (zh) * | 2019-03-26 | 2019-06-14 | 江阴市人民医院 | 一种支气管镜 |
| CN110367907B (zh) * | 2019-08-07 | 2024-04-12 | 湖南省华芯医疗器械有限公司 | 一种内窥镜的手持端 |
| WO2021117201A1 (ja) * | 2019-12-12 | 2021-06-17 | オリンパス株式会社 | 挿入機器の湾曲操作機構 |
| CN114845617B (zh) | 2019-12-24 | 2026-01-13 | 奥林巴斯株式会社 | 内窥镜的弯曲操作机构和内窥镜 |
| US12011146B2 (en) | 2020-04-30 | 2024-06-18 | Ambu A/S | Method of assembly of an endoscope control system |
| DE102020134036A1 (de) | 2020-12-17 | 2022-06-23 | Ambu A/S | Endoskop mit einem Endoskopgriff mit einer Trennvorrichtung |
| JP7359239B2 (ja) * | 2022-03-15 | 2023-10-11 | カシオ計算機株式会社 | 操作子及び電子楽器 |
| CN117731216A (zh) * | 2024-01-23 | 2024-03-22 | 中国人民解放军联勤保障部队第九〇一医院 | 一种软硬一体的电子胆道内窥镜 |
| WO2026069540A1 (ja) * | 2024-09-26 | 2026-04-02 | オリンパスメディカルシステムズ株式会社 | 操作コントローラおよび医療用マニピュレータシステム |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006192201A (ja) * | 2005-01-17 | 2006-07-27 | Olympus Corp | 電動湾曲内視鏡装置 |
| JP2009219822A (ja) * | 2008-03-19 | 2009-10-01 | Tetsumaru Miyawaki | 内視鏡の湾曲部駆動装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5658238A (en) * | 1992-02-25 | 1997-08-19 | Olympus Optical Co., Ltd. | Endoscope apparatus capable of being switched to a mode in which a curvature operating lever is returned and to a mode in which the curvature operating lever is not returned |
| US5454827A (en) * | 1994-05-24 | 1995-10-03 | Aust; Gilbert M. | Surgical instrument |
| US6673012B2 (en) * | 2000-04-19 | 2004-01-06 | Pentax Corporation | Control device for an endoscope |
| US6652506B2 (en) * | 2001-05-04 | 2003-11-25 | Cardiac Pacemakers, Inc. | Self-locking handle for steering a single or multiple-profile catheter |
| JP4827598B2 (ja) * | 2006-04-26 | 2011-11-30 | Hoya株式会社 | 内視鏡の湾曲保持機構 |
| JP2008264107A (ja) | 2007-04-18 | 2008-11-06 | Hoya Corp | 内視鏡の湾曲操作装置 |
| JP5405759B2 (ja) | 2008-03-25 | 2014-02-05 | 富士フイルム株式会社 | 内視鏡の湾曲部駆動装置 |
| US8790250B2 (en) * | 2008-12-10 | 2014-07-29 | Ambu A/S | Endoscope bending section control mechanism |
| DE102009011434A1 (de) * | 2009-02-20 | 2010-08-26 | Storz Endoskop Produktions Gmbh | Instrument mit selbstentriegelndem Verstellrad |
| JP5393383B2 (ja) * | 2009-09-30 | 2014-01-22 | Hoya株式会社 | 内視鏡の処置具起上操作装置 |
-
2013
- 2013-02-27 WO PCT/JP2013/055186 patent/WO2013129494A1/ja not_active Ceased
- 2013-02-27 CN CN201380011242.4A patent/CN104135907B/zh not_active Expired - Fee Related
- 2013-02-27 JP JP2013545574A patent/JP5583860B2/ja active Active
- 2013-02-27 EP EP13755253.5A patent/EP2821000A4/en not_active Withdrawn
- 2013-10-23 US US14/061,187 patent/US9237837B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006192201A (ja) * | 2005-01-17 | 2006-07-27 | Olympus Corp | 電動湾曲内視鏡装置 |
| JP2009219822A (ja) * | 2008-03-19 | 2009-10-01 | Tetsumaru Miyawaki | 内視鏡の湾曲部駆動装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10143361B2 (en) | 2014-12-19 | 2018-12-04 | Olympus Corporation | Endoscope system having rotatable elongated part and bending part controlled to bend based on rotation of elongated part |
Also Published As
| Publication number | Publication date |
|---|---|
| US9237837B2 (en) | 2016-01-19 |
| US20140135580A1 (en) | 2014-05-15 |
| CN104135907B (zh) | 2016-09-28 |
| EP2821000A1 (en) | 2015-01-07 |
| CN104135907A (zh) | 2014-11-05 |
| WO2013129494A1 (ja) | 2013-09-06 |
| JPWO2013129494A1 (ja) | 2015-07-30 |
| EP2821000A4 (en) | 2015-11-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5583860B2 (ja) | 操作入力部を備える挿入装置 | |
| JP5750623B2 (ja) | 導入装置 | |
| JP5330625B1 (ja) | 内視鏡 | |
| US8409079B2 (en) | Electric bending operation device and medical treatment system including electric bending operation device | |
| JP5851139B2 (ja) | 医療装置 | |
| JP5274727B2 (ja) | 内視鏡 | |
| JP2004321612A (ja) | 電動湾曲内視鏡 | |
| US20160353975A1 (en) | Bending operation mechanism for endoscope | |
| JP4454956B2 (ja) | 内視鏡 | |
| JP4813067B2 (ja) | 内視鏡装置 | |
| JPWO2007096950A1 (ja) | 内視鏡システム、及び医療器具 | |
| JP6063773B2 (ja) | 挿入装置 | |
| JP5830628B2 (ja) | 導入装置 | |
| JP5513347B2 (ja) | 内視鏡の湾曲操作装置、及びそれを用いた内視鏡装置 | |
| JPH04263830A (ja) | 内視鏡装置 | |
| JP3176671B2 (ja) | 電動湾曲式内視鏡装置 | |
| US9526406B2 (en) | Endoscopic instrument | |
| US20240277215A1 (en) | Endoscope and operation section for endoscope |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140618 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140708 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140716 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5583860 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |