JP5587930B2 - 距離算出装置及び距離算出方法 - Google Patents
距離算出装置及び距離算出方法 Download PDFInfo
- Publication number
- JP5587930B2 JP5587930B2 JP2012052922A JP2012052922A JP5587930B2 JP 5587930 B2 JP5587930 B2 JP 5587930B2 JP 2012052922 A JP2012052922 A JP 2012052922A JP 2012052922 A JP2012052922 A JP 2012052922A JP 5587930 B2 JP5587930 B2 JP 5587930B2
- Authority
- JP
- Japan
- Prior art keywords
- distance
- distance calculation
- calculation unit
- image information
- camera
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/14—Measuring arrangements characterised by the use of optical techniques for measuring distance or clearance between spaced objects or spaced apertures
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C3/00—Measuring distances in line of sight; Optical rangefinders
- G01C3/10—Measuring distances in line of sight; Optical rangefinders using a parallactic triangle with variable angles and a base of fixed length in the observation station, e.g. in the instrument
- G01C3/14—Measuring distances in line of sight; Optical rangefinders using a parallactic triangle with variable angles and a base of fixed length in the observation station, e.g. in the instrument with binocular observation at a single point, e.g. stereoscopic type
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/529—Depth or shape recovery from texture
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- Electromagnetism (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Measurement Of Optical Distance (AREA)
- Image Processing (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
Description

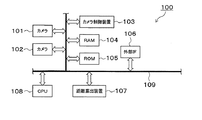
図1は、本発明に係る距離算出装置の第1の実施の形態が適用される撮像システムを概略的に示したものである。
図5は、本発明に係る距離算出装置の第2の実施の形態の内部構成を示したものである。図5に示す第2の実施の形態の距離算出装置107Aは、図2に示す第1の実施の形態の距離算出装置107に対して、ステレオ距離算出部が複数の距離算出手段を有する点が相違しており、その他の構成は、第1の実施の形態の距離算出装置107とほぼ同様である。したがって、第1の実施の形態の距離算出装置107と同様の構成については、同様の符号を付してその詳細な説明は省略する。
101、102 カメラ(撮像装置)
103 カメラ制御装置
104 RAM
104a、104b カメラ画像保存部
105 ROM
106 外部IF
107 距離算出装置
108 CPU
109 バス
201 ボケ量算出部
202 距離推定部
203 単眼距離算出部(第1の距離算出部)
204 ステレオ距離算出部(第2の距離算出部)
206 出力距離算出部
Claims (5)
- 複数の撮像装置を備えた撮像システムの距離算出装置であって、
前記複数の撮像装置のうち単数の撮像装置で撮像された画像情報に基づいて対象物までの距離を算出する第1の距離算出部と、
前記複数の撮像装置のうち少なくとも2つの撮像装置で撮像された画像情報に基づいて対象物までの距離を算出する第2の距離算出部と、
前記単数の撮像装置で撮像された画像情報と前記少なくとも2つの撮像装置で撮像された画像情報のボケ量を算出するボケ量算出部と、
前記単数の撮像装置と前記少なくとも2つの撮像装置による画像撮像時における前記対象物までの距離を推定する距離推定部と、
前記対象物までの出力距離を算出する出力距離算出部と、を備え、
前記出力距離算出部は、前記ボケ量算出部によって算出されたボケ量と前記距離推定部によって推定された推定距離とに基づいて、前記第1の距離算出部によって算出された第1の距離と前記第2の距離算出部によって算出された第2の距離のいずれかを前記出力距離として選択することを特徴とする距離算出装置。 - 前記第1の距離算出部は、前記単数の撮像装置で撮像された画像情報と前記少なくとも2つの撮像装置で撮像された画像情報のうち、前記ボケ量算出部によって算出されるボケ量が小さい画像情報に基づいて前記対象物までの距離を算出することを特徴とする請求項1に記載の距離算出装置。
- 前記第2の距離算出部は、前記少なくとも2つの撮像装置で撮像された画像情報に基づいて前記対象物までの距離を算出するための距離算出手段を複数有することを特徴とする請求項1または2に記載の距離算出装置。
- 前記距離算出装置は、前記ボケ量算出部によって算出されたボケ量と前記距離推定部によって推定された推定距離とに基づいて前記複数の距離算出手段のうちのいずれかを選択する距離算出選択部を更に備えることを特徴とする請求項3に記載の距離算出装置。
- 複数の撮像装置を備えた撮像システムの距離算出方法であって、
前記複数の撮像装置のうち単数の撮像装置で撮像された画像情報に基づいて対象物までの距離を算出し、前記複数の撮像装置のうち少なくとも2つの撮像装置で撮像された画像情報に基づいて対象物までの距離を算出し、前記単数の撮像装置で撮像された画像情報と前記少なくとも2つの撮像装置で撮像された画像情報のボケ量を算出し、前記単数の撮像装置と前記少なくとも2つの撮像装置による画像撮像時における前記対象物までの距離を推定し、前記ボケ量と前記推定距離とに基づいて算出されたそれぞれの距離のいずれかを前記対象物までの出力距離として選択することを特徴とする距離算出方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012052922A JP5587930B2 (ja) | 2012-03-09 | 2012-03-09 | 距離算出装置及び距離算出方法 |
| PCT/JP2013/052652 WO2013132947A1 (ja) | 2012-03-09 | 2013-02-06 | 距離算出装置及び距離算出方法 |
| US14/379,392 US9530210B2 (en) | 2012-03-09 | 2013-02-06 | Distance calculator and distance calculation method |
| EP13758317.5A EP2824417B1 (en) | 2012-03-09 | 2013-02-06 | Distance calculation device and distance calculation method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012052922A JP5587930B2 (ja) | 2012-03-09 | 2012-03-09 | 距離算出装置及び距離算出方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014149358A Division JP2014238409A (ja) | 2014-07-23 | 2014-07-23 | 距離算出装置及び距離算出方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013186043A JP2013186043A (ja) | 2013-09-19 |
| JP5587930B2 true JP5587930B2 (ja) | 2014-09-10 |
Family
ID=49116431
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012052922A Active JP5587930B2 (ja) | 2012-03-09 | 2012-03-09 | 距離算出装置及び距離算出方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9530210B2 (ja) |
| EP (1) | EP2824417B1 (ja) |
| JP (1) | JP5587930B2 (ja) |
| WO (1) | WO2013132947A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014238409A (ja) * | 2014-07-23 | 2014-12-18 | 日立オートモティブシステムズ株式会社 | 距離算出装置及び距離算出方法 |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10247551B2 (en) | 2014-09-11 | 2019-04-02 | Hitachi Automotive Systems, Ltd. | Vehicle image processing device for environment recognition |
| JP6511283B2 (ja) * | 2015-02-12 | 2019-05-15 | 日立オートモティブシステムズ株式会社 | 物体検知装置 |
| KR102299446B1 (ko) * | 2015-03-25 | 2021-09-08 | 현대모비스 주식회사 | 인식 고장 진단 장치 및 인식 고장 진단 방법 |
| US10873726B1 (en) * | 2015-06-29 | 2020-12-22 | Amazon Technologies, Inc. | Management of sensor failure in a facility |
| US10223793B1 (en) * | 2015-08-05 | 2019-03-05 | Al Incorporated | Laser distance measuring method and system |
| US9972098B1 (en) * | 2015-08-23 | 2018-05-15 | AI Incorporated | Remote distance estimation system and method |
| US11069082B1 (en) * | 2015-08-23 | 2021-07-20 | AI Incorporated | Remote distance estimation system and method |
| US11935256B1 (en) | 2015-08-23 | 2024-03-19 | AI Incorporated | Remote distance estimation system and method |
| US9800795B2 (en) * | 2015-12-21 | 2017-10-24 | Intel Corporation | Auto range control for active illumination depth camera |
| JP6660751B2 (ja) * | 2016-02-04 | 2020-03-11 | 日立オートモティブシステムズ株式会社 | 撮像装置 |
| JP6585006B2 (ja) * | 2016-06-07 | 2019-10-02 | 株式会社東芝 | 撮影装置および車両 |
| US20180018024A1 (en) * | 2016-07-12 | 2018-01-18 | Qualcomm Incorporated | Techniques for determining proximity based on image blurriness |
| CN109074476A (zh) * | 2016-08-01 | 2018-12-21 | 深圳市大疆创新科技有限公司 | 用于障碍物规避的系统以及方法 |
| KR102462502B1 (ko) * | 2016-08-16 | 2022-11-02 | 삼성전자주식회사 | 스테레오 카메라 기반의 자율 주행 방법 및 그 장치 |
| US10346995B1 (en) * | 2016-08-22 | 2019-07-09 | AI Incorporated | Remote distance estimation system and method |
| WO2018086133A1 (en) * | 2016-11-14 | 2018-05-17 | SZ DJI Technology Co., Ltd. | Methods and systems for selective sensor fusion |
| KR102286006B1 (ko) * | 2016-11-23 | 2021-08-04 | 한화디펜스 주식회사 | 추종 장치 및 추종 시스템 |
| NL2019898B1 (en) | 2017-11-13 | 2019-05-17 | Supersub Sportbases B V | Underlayment for dampening a top floor. |
| JP7033649B2 (ja) * | 2018-03-22 | 2022-03-10 | 日立Astemo株式会社 | 車載ステレオカメラ |
| JP7232005B2 (ja) * | 2018-09-20 | 2023-03-02 | 株式会社Subaru | 車両の走行環境検出装置及び走行制御システム |
| JP6892462B2 (ja) * | 2019-02-05 | 2021-06-23 | ファナック株式会社 | 機械制御装置 |
| JP7389729B2 (ja) * | 2020-09-10 | 2023-11-30 | 株式会社日立製作所 | 障害物検知装置、障害物検知システム及び障害物検知方法 |
| JP7796632B2 (ja) * | 2022-12-16 | 2026-01-09 | Astemo株式会社 | 画像処理装置及び画像処理方法 |
| US12571629B2 (en) * | 2023-12-19 | 2026-03-10 | Kevin Sudie | Distance measuring assembly |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2900737B2 (ja) * | 1993-02-01 | 1999-06-02 | トヨタ自動車株式会社 | 車間距離検出装置 |
| JP3827368B2 (ja) * | 1996-08-01 | 2006-09-27 | 富士通テン株式会社 | 複眼カメラによる車間距離計測装置 |
| JP3581141B2 (ja) * | 2002-07-05 | 2004-10-27 | 富士写真光機株式会社 | 測距装置及びこれを備えたカメラ |
| CN100359357C (zh) * | 2004-06-15 | 2008-01-02 | 佳能株式会社 | 摄影装置 |
| WO2006106522A2 (en) * | 2005-04-07 | 2006-10-12 | Visionsense Ltd. | Method for reconstructing a three- dimensional surface of an object |
| JP2006322853A (ja) * | 2005-05-19 | 2006-11-30 | Olympus Corp | 距離計測装置、距離計測方法および距離計測プログラム |
| EP1887382A1 (en) * | 2005-05-19 | 2008-02-13 | Olympus Corporation | Distance measuring apparatus, distance measuring method and distance measuring program |
| JP2007263657A (ja) | 2006-03-28 | 2007-10-11 | Denso It Laboratory Inc | 3次元座標取得装置 |
| JP4246258B2 (ja) * | 2007-07-23 | 2009-04-02 | パナソニック株式会社 | 測距機能を有する複眼方式の撮像装置 |
| KR101415872B1 (ko) * | 2007-09-14 | 2014-07-11 | 삼성전기주식회사 | 영상 획득 장치의 자동초점조절 방법 및 장치 |
| JP2009188697A (ja) * | 2008-02-06 | 2009-08-20 | Fujifilm Corp | 多焦点カメラ装置、それに用いられる画像処理方法およびプログラム |
| WO2011158515A1 (ja) * | 2010-06-17 | 2011-12-22 | パナソニック株式会社 | 距離推定装置、距離推定方法、集積回路、コンピュータプログラム |
| JP2012221103A (ja) * | 2011-04-06 | 2012-11-12 | Denso Corp | 車両用画像処理装置 |
| US9068831B2 (en) * | 2011-05-27 | 2015-06-30 | Panasonic Intellectual Property Management Co., Ltd. | Image processing apparatus and image processing method |
| JP2013186042A (ja) | 2012-03-09 | 2013-09-19 | Hitachi Automotive Systems Ltd | 距離算出装置及び距離算出方法 |
| JP2015148532A (ja) * | 2014-02-07 | 2015-08-20 | キヤノン株式会社 | 距離計測装置、撮像装置、距離計測方法、およびプログラム |
-
2012
- 2012-03-09 JP JP2012052922A patent/JP5587930B2/ja active Active
-
2013
- 2013-02-06 WO PCT/JP2013/052652 patent/WO2013132947A1/ja not_active Ceased
- 2013-02-06 US US14/379,392 patent/US9530210B2/en active Active
- 2013-02-06 EP EP13758317.5A patent/EP2824417B1/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014238409A (ja) * | 2014-07-23 | 2014-12-18 | 日立オートモティブシステムズ株式会社 | 距離算出装置及び距離算出方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2824417A1 (en) | 2015-01-14 |
| JP2013186043A (ja) | 2013-09-19 |
| EP2824417B1 (en) | 2020-08-19 |
| US20150036886A1 (en) | 2015-02-05 |
| EP2824417A4 (en) | 2015-09-23 |
| WO2013132947A1 (ja) | 2013-09-12 |
| US9530210B2 (en) | 2016-12-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5587930B2 (ja) | 距離算出装置及び距離算出方法 | |
| JP6138861B2 (ja) | 距離算出装置 | |
| WO2013132951A1 (ja) | 距離算出装置及び距離算出方法 | |
| US11587248B2 (en) | Method and system for multiple stereo based depth estimation and collision warning/avoidance utilizing the same | |
| US10762643B2 (en) | Method for evaluating image data of a vehicle camera | |
| KR101776621B1 (ko) | 에지 기반 재조정을 이용하여 이동 로봇의 위치를 인식하기 위한 장치 및 그 방법 | |
| KR101776620B1 (ko) | 검색 기반 상관 매칭을 이용하여 이동 로봇의 위치를 인식하기 위한 장치 및 그 방법 | |
| US10650535B2 (en) | Measurement device and measurement method | |
| JP2019510312A (ja) | 自動車両の環境領域の2つの画像間の動き推定のための方法、コンピュータデバイス、運転者支援システム、及び自動車両 | |
| CN104364796A (zh) | 用于处理立体数据的方法和设备 | |
| JP5107154B2 (ja) | 運動推定装置 | |
| JP2017142613A (ja) | 情報処理装置、情報処理システム、情報処理方法及び情報処理プログラム | |
| JP2013097675A (ja) | 勾配推定装置、勾配推定方法、及び勾配推定プログラム | |
| JP2014238409A (ja) | 距離算出装置及び距離算出方法 | |
| JP6577595B2 (ja) | 車両用外界認識装置 | |
| US20130142388A1 (en) | Arrival time estimation device, arrival time estimation method, arrival time estimation program, and information providing apparatus | |
| JP2004093457A (ja) | 画像処理装置、及び画像処理方法 | |
| US20110085699A1 (en) | Method and apparatus for tracking image patch considering scale | |
| CN104697491A (zh) | 在车辆中使用单视场成像器的距离确定 | |
| JP2018151940A (ja) | 障害物検出装置および障害物検出方法 | |
| JP6416654B2 (ja) | 白線検出装置 | |
| KR101869226B1 (ko) | 이종 카메라를 위한 시차 맵 생성 방법 | |
| JP6337446B2 (ja) | 画像処理装置及び方法、並びに画像処理装置の制御プログラム | |
| JP2020027057A (ja) | ステレオカメラ装置 | |
| JP2020042715A (ja) | 移動情報推定装置、異常検出装置、および、移動情報推定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130902 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140325 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140523 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140624 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140724 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5587930 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |