JP5729372B2 - 発電制御装置、および発電制御システム - Google Patents
発電制御装置、および発電制御システム Download PDFInfo
- Publication number
- JP5729372B2 JP5729372B2 JP2012287521A JP2012287521A JP5729372B2 JP 5729372 B2 JP5729372 B2 JP 5729372B2 JP 2012287521 A JP2012287521 A JP 2012287521A JP 2012287521 A JP2012287521 A JP 2012287521A JP 5729372 B2 JP5729372 B2 JP 5729372B2
- Authority
- JP
- Japan
- Prior art keywords
- value
- battery
- parameter value
- power generation
- generation control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/20—Reducing vibrations in the driveline
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P9/00—Arrangements for controlling electric generators for the purpose of obtaining a desired output
- H02P9/04—Control effected upon non-electric prime mover and dependent upon electric output value of the generator
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/30—Conjoint control of vehicle sub-units of different type or different function including control of auxiliary equipment, e.g. air-conditioning compressors or oil pumps
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—ELECTRIC POWER NETWORKS; CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries
- H02J7/14—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries for charging batteries from dynamo-electric generators driven at varying speed, e.g. on vehicle
- H02J7/1446—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries for charging batteries from dynamo-electric generators driven at varying speed, e.g. on vehicle in response to parameters of a vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/20—Reducing vibrations in the driveline
- B60W2030/206—Reducing vibrations in the driveline related or induced by the engine
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0043—Signal treatments, identification of variables or parameters, parameter estimation or state estimation
- B60W2050/0052—Filtering, filters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0043—Signal treatments, identification of variables or parameters, parameter estimation or state estimation
- B60W2050/0052—Filtering, filters
- B60W2050/0054—Cut-off filters, retarders, delaying means, dead zones, threshold values or cut-off frequency
- B60W2050/0056—Low-pass filters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/24—Energy storage means
- B60W2510/242—Energy storage means for electrical energy
- B60W2510/244—Charge state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/08—Electric propulsion units
- B60W2710/083—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/08—Electric propulsion units
- B60W2710/086—Power
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/24—Energy storage means
- B60W2710/242—Energy storage means for electrical energy
- B60W2710/244—Charge state
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/80—Technologies aiming to reduce greenhouse gasses emissions common to all road transportation technologies
- Y02T10/92—Energy efficient charging or discharging systems for batteries, ultracapacitors, supercapacitors or double-layer capacitors specially adapted for vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Automation & Control Theory (AREA)
- Control Of Eletrric Generators (AREA)
Description
[第1実施形態]
本発明が適用された発電制御システム1は、例えば乗用車等の車両に搭載されている。発電制御システム1は、図1に示すように、点火着火式の走行用エンジン10、エンジン10により回転駆動して発電するオルタネータ20、発電機の発電電力を充電するバッテリ30、エンジン10およびオルタネータ20の作動を制御する演算装置(ECU13)を備えている。
なお、精度向上のためDOD推定結果を元に調整電圧指令値Vrefを算出しているが、Vrefに一定電圧値を指令するだけでも、DODは指令したVrefに対応する値に保たれることになり、適切な一定Vref値(満充電や空充電に対して余裕がある範囲)を指令すれば、同等の機能が達成できる。つまり、バッテリ充電量管理手段は上記のような簡略化した手段でも機能を実現することもできる。
以上のように詳述した発電制御システム1において演算装置13は、バッテリ30の状態および自車両の運動状態を含む車両状態を取得する。そして、車両状態に基づいて、バッテリの残容量を基準範囲内に維持するために必要な充電パラメータ値(ΔDbatt、第2実施形態ではΔTbatt、第3実施形態ではVrefu)および車両の振動を抑制するための制振パラメータ値(ΔDa、第2実施形態ではΔTa)を演算する。そして、充電パラメータ値および制振パラメータ値に基づいて、オルタネータ20の励磁巻線に流れる励磁電流を設定する。
次に、別形態の発電制御システムについて説明する。本実施形態以下の発電制御システムでは、第1実施形態の発電制御システム1と異なる箇所のみを詳述し、第1実施形態の発電制御システム1と同様の箇所については、同一の符号を付して説明を省略する。
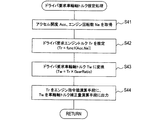
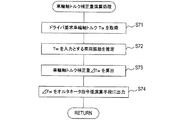
次に、第3実施形態の発電制御システムについて説明する。本実施形態のオルタネータ指令値演算手段90は、図11に示す機能を備えている。これらの機能について、図12に示すオルタネータ指令値演算処理を用いて説明する。このオルタネータ指令値演算手段90は、電圧レギュレータ904から出力される励磁電流デューティ比Fdutyの上限値を設定することができるものの、電圧レギュレータ904から出力される励磁電流デューティ比Fdutyが直接設定できない場合を想定している。
本発明の実施の形態は、上記の実施形態に何ら限定されることはなく、本発明の技術的範囲に属する限り種々の形態を採りうる。
上記実施形態の演算装置13は本発明でいう発電制御装置に相当し、本実施形態のエンジン10は本発明でいう内燃機関に相当する。また、本実施形態のオルタネータ20は本発明でいう発電機に相当する。
Claims (6)
- 内燃機関(10)を有する車両に搭載され、前記内燃機関により駆動される発電機(20)がバッテリ(30)に対する給電を行う際の発電電力を制御する発電制御装置(13)であって、
前記バッテリの状態および前記車両の運動状態を含む車両状態を取得する車両状態取得手段(S91,S111,S131)と、
前記車両状態に基づいて、前記バッテリの残容量を基準範囲内に維持するために必要な充電パラメータ値(ΔDbatt、ΔTbatt、Vrefu)、および前記車両の振動を抑制するための制振パラメータ値(ΔDa、ΔTa)を演算するパラメータ値演算手段(S92〜S98、S112〜S117、S132〜S137)と、
前記充電パラメータ値および前記制振パラメータ値に基づいて、前記発電機の励磁巻線に流れる励磁電流を設定する励磁電流設定手段(S99、S118、S119、S138、S139)と、
を備え、
前記パラメータ値演算手段は、前記充電パラメータ値として前記バッテリの残容量を基準範囲内に維持するために必要な励磁電流に関する値を表す維持電流値を演算するとともに、前記制振パラメータ値として前記車両の振動を抑制するために必要な発電機におけるトルク値を励磁電流に変換した値を表す制振電流値を演算し、
前記励磁電流設定手段は、前記維持電流値と前記制振電流値とを合算した値を前記励磁電流として設定すること
を特徴とする発電制御装置。 - 内燃機関(10)を有する車両に搭載され、前記内燃機関により駆動される発電機(20)がバッテリ(30)に対する給電を行う際の発電電力を制御する発電制御装置(13)であって、
前記バッテリの状態および前記車両の運動状態を含む車両状態を取得する車両状態取得手段(S91,S111,S131)と、
前記車両状態に基づいて、前記バッテリの残容量を基準範囲内に維持するために必要な充電パラメータ値(ΔDbatt、ΔTbatt、Vrefu)、および前記車両の振動を抑制するための制振パラメータ値(ΔDa、ΔTa)を演算するパラメータ値演算手段(S92〜S98、S112〜S117、S132〜S137)と、
前記充電パラメータ値および前記制振パラメータ値に基づいて、前記発電機の励磁巻線に流れる励磁電流を設定する励磁電流設定手段(S99、S118、S119、S138、S139)と、
を備え、
前記パラメータ値演算手段は、前記充電パラメータ値として前記バッテリの残容量を基準範囲内に維持するために必要な励磁電流に関する値を発電機におけるトルク値に変換した維持トルク値を演算するとともに、前記制振パラメータ値として前記車両の振動を抑制するために必要な発電機におけるトルク値を表す制振トルク値を演算し、
前記励磁電流設定手段は、前記維持トルク値と前記制振トルク値とを合算した値を電流値に変換することによって得られた値を前記励磁電流として設定すること
を特徴とする発電制御装置。 - 請求項1または請求項2に記載の発電制御装置において、
前記車両状態取得手段は、前記バッテリの状態として前記バッテリの電圧値を取得し、
前記パラメータ値演算手段は、前記バッテリの電圧値に基づいて前記充電パラメータ値を演算するとともに、
前記バッテリの電圧値または前記充電パラメータ値に含まれる高周波成分を除去するフィルタ手段(S96)、を備え、
前記励磁電流設定手段は、前記フィルタ手段により高周波成分が除去された充電パラメータ値および前記制振パラメータ値に基づいて、前記発電機の励磁巻線に流れる励磁電流を設定すること
を特徴とする発電制御装置。 - 請求項1〜請求項3の何れか1項に記載の発電制御装置において、
前記パラメータ値演算手段は、前記充電パラメータ値として前記バッテリの残容量を基準範囲内に維持するために必要な励磁電流に関する値を表す維持電流値に対して一定量を加算した加算電流値を演算し、
前記励磁電流設定手段にて設定された励磁電流を上限値として、前記加算電流値を前記
上限値に抑制する抑制手段(S139)、
を備えたことを特徴とする発電制御装置。 - 請求項1〜請求項4の何れか1項に記載の発電制御装置において、
前記励磁電流設定手段により設定された励磁電流を前記発電機の励磁巻線に出力する出力手段(S100、S120、S140)
を備えたことを特徴とする発電制御装置。 - 車両に搭載され、内燃機関と、前記内燃機関により駆動される発電機と、前記発電機によって充電されるバッテリと、前記バッテリに対する給電を行う際の発電電力を制御する発電制御装置とを備えた発電制御システムであって、
前記発電制御装置は、請求項1〜請求項5の何れか1項に記載の発電制御装置として構成されていること
を特徴とする発電制御システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012287521A JP5729372B2 (ja) | 2012-12-28 | 2012-12-28 | 発電制御装置、および発電制御システム |
| EP13194978.6A EP2750284B1 (en) | 2012-12-28 | 2013-11-29 | Electric power generation control device and electric power generation control system |
| US14/136,338 US9184686B2 (en) | 2012-12-28 | 2013-12-20 | Electric power generation control device and electric power generation control system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012287521A JP5729372B2 (ja) | 2012-12-28 | 2012-12-28 | 発電制御装置、および発電制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014131397A JP2014131397A (ja) | 2014-07-10 |
| JP5729372B2 true JP5729372B2 (ja) | 2015-06-03 |
Family
ID=49680866
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012287521A Expired - Fee Related JP5729372B2 (ja) | 2012-12-28 | 2012-12-28 | 発電制御装置、および発電制御システム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9184686B2 (ja) |
| EP (1) | EP2750284B1 (ja) |
| JP (1) | JP5729372B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH062537B2 (ja) | 1985-11-15 | 1994-01-12 | 三田工業株式会社 | 複写機の用紙搬送装置 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5278373B2 (ja) * | 2010-02-03 | 2013-09-04 | トヨタ自動車株式会社 | 車両の制振制御装置 |
| US9356548B2 (en) * | 2012-05-10 | 2016-05-31 | Denso Corporation | Vibration damping control apparatus for vehicle, vibration damping control system for vehicle, and vehicle motion control apparatus |
| JP5850035B2 (ja) * | 2013-12-12 | 2016-02-03 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| US9988992B2 (en) * | 2016-02-03 | 2018-06-05 | GM Global Technology Operations LLC | Method of operating a fuel system of an internal combustion engine |
| JP6702819B2 (ja) * | 2016-07-14 | 2020-06-03 | キャタピラー エス エー アール エル | 建設機械の送風手段制御システム |
| FR3073684B1 (fr) * | 2017-11-16 | 2021-03-12 | Valeo Equip Electr Moteur | Machine electrique pour un vehicule automobile comprenant un capteur de courant |
| KR102180467B1 (ko) * | 2018-07-16 | 2020-11-19 | 한국생산기술연구원 | 전기차 탑재형 발전기 제어시스템 및 장치 |
| TWI839208B (zh) | 2023-05-08 | 2024-04-11 | 亞福儲能股份有限公司 | 複合電能系統及其能源管理最佳化方法 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5270575A (en) | 1989-11-30 | 1993-12-14 | Mitsubishi Jidosha Kogyo Kabushiki Kaisha | Device for controlling change in idling |
| WO1991008612A1 (fr) * | 1989-11-30 | 1991-06-13 | Mitsubishi Jidosha Kogyo Kabushiki Kaisha | Dispositif de regulation des variations du ralenti |
| JP2776980B2 (ja) * | 1990-11-28 | 1998-07-16 | 株式会社日立製作所 | 半導体パワースイッチの電流検出装置 |
| JP3094745B2 (ja) * | 1993-09-24 | 2000-10-03 | トヨタ自動車株式会社 | ハイブリッド車の発電制御装置 |
| DE19532163A1 (de) * | 1995-08-31 | 1997-03-06 | Clouth Gummiwerke Ag | System zur aktiven Verringerung von Drehungleichförmigkeiten einer Welle, insbesondere der Triebwelle eines Verbrennungsmotors, und Verfahren hierzu |
| US6522105B2 (en) * | 2000-10-23 | 2003-02-18 | Shindengen Electric Manufacturing Co., Ltd. | Battery charging apparatus |
| JP4306945B2 (ja) * | 2000-10-23 | 2009-08-05 | 新電元工業株式会社 | バッテリ充電装置 |
| JP4172391B2 (ja) | 2003-12-24 | 2008-10-29 | 株式会社デンソー | 車両統合制御システムおよびプログラム |
| JP4161923B2 (ja) | 2004-03-09 | 2008-10-08 | 株式会社デンソー | 車両安定化制御システム |
| JP4267565B2 (ja) * | 2004-12-14 | 2009-05-27 | トヨタ自動車株式会社 | 動力出力装置およびこれを搭載する自動車 |
| JP4468969B2 (ja) * | 2007-05-21 | 2010-05-26 | 三菱電機株式会社 | 内燃機関の制御装置 |
| GB2452246B (en) * | 2007-07-19 | 2012-01-11 | Ford Global Tech Llc | A micro-hybrid motor vehicle |
| US7997363B2 (en) * | 2007-09-17 | 2011-08-16 | Denso Corporation | Vehicle control system and method |
| JP5277976B2 (ja) | 2009-01-14 | 2013-08-28 | 日産自動車株式会社 | 車両の発電制御装置 |
| JP5146686B2 (ja) | 2009-01-29 | 2013-02-20 | トヨタ自動車株式会社 | 車両の駆動トルク制御装置 |
| JP2011162178A (ja) * | 2010-01-13 | 2011-08-25 | Toyota Central R&D Labs Inc | 車両搭載用発電装置 |
| DE102010041499A1 (de) * | 2010-09-28 | 2012-03-29 | Robert Bosch Gmbh | Sensorvorrichtung mit Strombegrenzereinheit |
| JP5609998B2 (ja) | 2012-05-10 | 2014-10-22 | 株式会社デンソー | 車両用制振制御装置及び車両用制振制御システム |
| JP5915548B2 (ja) | 2013-01-11 | 2016-05-11 | 株式会社デンソー | 車両運動制御装置 |
| US9356548B2 (en) | 2012-05-10 | 2016-05-31 | Denso Corporation | Vibration damping control apparatus for vehicle, vibration damping control system for vehicle, and vehicle motion control apparatus |
| JP5741596B2 (ja) | 2013-01-11 | 2015-07-01 | 株式会社デンソー | 車両運動制御装置 |
-
2012
- 2012-12-28 JP JP2012287521A patent/JP5729372B2/ja not_active Expired - Fee Related
-
2013
- 2013-11-29 EP EP13194978.6A patent/EP2750284B1/en not_active Not-in-force
- 2013-12-20 US US14/136,338 patent/US9184686B2/en not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH062537B2 (ja) | 1985-11-15 | 1994-01-12 | 三田工業株式会社 | 複写機の用紙搬送装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2750284A1 (en) | 2014-07-02 |
| EP2750284B1 (en) | 2019-01-09 |
| US20140183878A1 (en) | 2014-07-03 |
| JP2014131397A (ja) | 2014-07-10 |
| US9184686B2 (en) | 2015-11-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5729372B2 (ja) | 発電制御装置、および発電制御システム | |
| CN100570985C (zh) | 车用发电控制装置 | |
| CN102438870B (zh) | 电动车辆的控制装置及控制方法 | |
| JP4483985B2 (ja) | 車両制御装置 | |
| WO2013168808A1 (ja) | 車両用制振制御装置、車両用制振制御システム、及び車両運動制御装置 | |
| JP2008024022A (ja) | ハイブリッド車両の制御装置 | |
| CN110027540B (zh) | 车辆的混合动力系统的控制装置和控制方法 | |
| CN106143470B (zh) | 电源控制设备 | |
| KR101995173B1 (ko) | 마일드 하이브리드 차량의 운전 제어 장치 및 그 제어 방법 | |
| CN103427744B (zh) | 车辆用发电装置及其发电控制方法 | |
| JP6303620B2 (ja) | ハイブリッド車両 | |
| JP5331065B2 (ja) | 車載内燃機関制御装置 | |
| JP5741596B2 (ja) | 車両運動制御装置 | |
| JPWO2012066657A1 (ja) | 充放電制御装置及び方法 | |
| JP5915548B2 (ja) | 車両運動制御装置 | |
| JP5609998B2 (ja) | 車両用制振制御装置及び車両用制振制御システム | |
| JP2018019557A (ja) | 車両用制御装置 | |
| JP2014131396A (ja) | 車両用制御装置 | |
| JP2019119405A (ja) | ハイブリッド自動車 | |
| KR101405745B1 (ko) | 차량의 엔진 토크 제어방법 | |
| JP6540722B2 (ja) | 電源装置 | |
| JP2014129747A (ja) | 車両制御装置、および車両制御システム | |
| CN106553638B (zh) | 具有改进的基于功率域的零速控制的扭矩生成系统和方法 | |
| JP5900381B2 (ja) | オルタネータ制御装置 | |
| JP2015189332A (ja) | ハイブリッド車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140611 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20141110 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141125 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150123 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150310 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150323 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5729372 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |