JP5729538B2 - 運転解析装置 - Google Patents
運転解析装置 Download PDFInfo
- Publication number
- JP5729538B2 JP5729538B2 JP2010255715A JP2010255715A JP5729538B2 JP 5729538 B2 JP5729538 B2 JP 5729538B2 JP 2010255715 A JP2010255715 A JP 2010255715A JP 2010255715 A JP2010255715 A JP 2010255715A JP 5729538 B2 JP5729538 B2 JP 5729538B2
- Authority
- JP
- Japan
- Prior art keywords
- driving
- sensor
- bicycle
- sensor unit
- analysis information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000004458 analytical method Methods 0.000 title claims description 80
- 230000001133 acceleration Effects 0.000 claims description 31
- 238000001514 detection method Methods 0.000 description 15
- 238000010586 diagram Methods 0.000 description 12
- 238000004891 communication Methods 0.000 description 7
- 238000012545 processing Methods 0.000 description 7
- 238000000034 method Methods 0.000 description 6
- 238000005096 rolling process Methods 0.000 description 6
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 238000004364 calculation method Methods 0.000 description 2
- 235000019577 caloric intake Nutrition 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000011156 evaluation Methods 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 238000012549 training Methods 0.000 description 2
- 230000003321 amplification Effects 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 238000005728 strengthening Methods 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
Images












Landscapes
- Navigation (AREA)
- Indicating Measured Values (AREA)
Description
図1は、本実施形態の運転解析装置の構成例を示す図である。
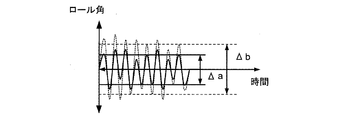
図2(A)及び図2(B)は、センサー部10の取り付け位置の第1の例を示す図である。図2(A)は横方向から使用者と自転車を見た図であり、図2(B)は後ろ方向から使用者と自転車を見た図である。この第1の取り付け例では、センサー部10は、使用者2の腰の後ろに、任意の1つの検出軸が自転車3の後方又は前方を向くように取り付けられている。CPU200でこの検出軸回り(図2(B)の破線矢印)の角速度データを積分処理することでロール角を算出し、現在のロール角を表示部240にリアルタイムに表示させることができる。また、ロール角の時間変化の情報を、グラフ化して表示部240に表示させたり、不揮発性メモリー250に記録することができる。
図5(A)、図5(B)及び図5(C)は、センサー部10の取り付け位置の第2の例を示す図である。5(A)は横方向から自転車を見た図であり、図5(B)は後ろ方向から自転車を見た図であり、図5(C)は上方向から自転車を見た図である。この第2の取り付け例では、センサー部10は、自転車3のトップチューブに、任意の1つの検出軸(第1の検出軸)が自転車3の後方又は前方を向き、他の任意の1つの検出軸(第2の検出軸)が上方又は下方を向くように取り付けられている。CPU200で第1の検出軸回り(図5(B)の破線矢印)の角速度データを積分処理することでロール角を算出し、現在のロール角を表示部240にリアルタイムに表示させることができる。また、CPU200で第2の検出軸回り(図5(C)の破線矢印)の角速度データを積分処理することでヨー角を算出し、現在のヨー角を表示部240にリアルタイムに表示させることができる。さらに、ロール角やヨー角の時間変化の情報をグラフ化して表示部240に表示させたり、不揮発性メモリー250に記録することができる。
図8は、センサー部10の取り付け位置の第3の例を示す図である。図8は横方向から使用者と自転車を見た図である。この第3の取り付け例では、2つのセンサー部10a,10bが自転車3に取り付けられている。

例えば次式(2)によりクランクの回転数N[rpm]を算出することができる。
図10は、センサー部10の取り付け位置の第4の例を示す図である。図10は横方向から使用者と自転車を見た図である。この第4の取り付け例では、第1の取り付け例と同様に、1つのセンサー部10aが、使用者2の腰の後ろに、任意の1つの検出軸が自転車3の後方又は前方を向くように取り付けられている。また、第3の取り付け例と同様に、2つのセンサー10b,10cがそれぞれ自転車3のフレームとクランクに取り付けられている。さらに、センサー10bは、第2の取り付け例と同様に、自転車3のトップチューブに、任意の1つの検出軸が自転車3の後方又は前方を向き、他の任意の1つの検出軸が上方又は下方を向くように取り付けられている。
図11〜図13は、表示器部20の表示部240に表示される画面の一例を示す図であり、図11〜図13を用いて、表示器部20の処理について具体的に説明する。
Claims (7)
- 自転車および当該自転車の使用者の少なくとも一方に取り付けられる角速度センサーを含むセンサー部の出力データに基づき、走行中の前記自転車のロール方向及びヨー方向の少なくとも一方の動き量を算出し、前記動き量を運転解析情報とし、
前記動き量は、ロール角及びヨー角の少なくとも一方の所定期間における平均振幅値であることを特徴とする運転解析装置。 - 請求項1において、
前記動き量から前記使用者の運転技術レベルを判定する、運転解析装置。 - 請求項1または2において、
前記動き量の時間変化から前記使用者の疲労度を判定する、運転解析装置。 - 請求項1乃至3のいずれか1項において、
前記センサー部は加速度センサーを含み、
前記角速度センサーおよび前記加速度センサーの出力データに基づき、走行中の前記自転車の姿勢を算出し、前記姿勢を前記運転解析情報とする、運転解析装置。 - 請求項1乃至4のいずれか1項において、
前記センサー部は、前記自転車のフレームに取り付けられた加速度センサーを含む第1のセンサー部と、前記自転車のクランクに取り付けられた角速度センサーを含む第2のセンサー部と、を含み、
前記第1のセンサー部から受信したデータを用いて、走行中の前記自転車の速度を算出し、
前記第2のセンサー部から受信したデータを用いて、前記クランクの回転数を算出し、
前記速度と前記回転数を用いてギア比を算出する、運転解析装置。 - 請求項1乃至5のいずれか1項において、
前記運転解析情報を表示する表示部を備える、運転解析装置。 - 請求項6において、
前記運転解析情報を記憶する記憶部を含み、
前記運転解析情報の履歴を前記記憶部から読み出して前記表示部に表示させる、運転解析装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010255715A JP5729538B2 (ja) | 2010-11-16 | 2010-11-16 | 運転解析装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010255715A JP5729538B2 (ja) | 2010-11-16 | 2010-11-16 | 運転解析装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012106553A JP2012106553A (ja) | 2012-06-07 |
| JP2012106553A5 JP2012106553A5 (ja) | 2013-12-26 |
| JP5729538B2 true JP5729538B2 (ja) | 2015-06-03 |
Family
ID=46492692
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010255715A Expired - Fee Related JP5729538B2 (ja) | 2010-11-16 | 2010-11-16 | 運転解析装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5729538B2 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102686476B (zh) * | 2009-12-25 | 2014-10-08 | 雅马哈发动机株式会社 | 驾驶员特性判断装置以及包括所述驾驶员特性判断装置的跨骑式车辆 |
| JP6318784B2 (ja) | 2014-04-04 | 2018-05-09 | ソニー株式会社 | 回転数検出装置及び回転数検出方法並びにプログラム |
| KR101548239B1 (ko) * | 2014-04-07 | 2015-08-28 | 국방과학연구소 | 3축 가속도계를 이용한 자전거용 케이던스센서와 속도계 |
| JP6476454B2 (ja) * | 2015-03-09 | 2019-03-06 | 本田技研工業株式会社 | 鞍乗り型車両の疲労警告装置 |
| CN106143717B (zh) * | 2016-06-23 | 2018-05-04 | 北京小米移动软件有限公司 | 安全行车方法及装置 |
| JP7129642B2 (ja) * | 2017-12-27 | 2022-09-02 | パナソニックIpマネジメント株式会社 | 自転車及び診断システム |
| JP7736422B2 (ja) * | 2019-04-26 | 2025-09-09 | 株式会社シマノ | 人力駆動車用の報知装置、人力駆動車用の報知システム、および、人力駆動車用の制御装置 |
| JP7811869B2 (ja) * | 2022-03-18 | 2026-02-06 | 株式会社シマノ | 制御装置 |
| CN114694799B (zh) * | 2022-04-01 | 2024-10-18 | Oppo广东移动通信有限公司 | 数据处理方法、装置、电子设备及存储介质 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3334200B2 (ja) * | 1992-12-30 | 2002-10-15 | カシオ計算機株式会社 | 自転車のペダル回転状態報知装置 |
| JP3044025B1 (ja) * | 1998-12-09 | 2000-05-22 | 株式会社データ・テック | 運転傾向性の分析が可能な運行管理システム及びその構成装置 |
| JP2001074764A (ja) * | 1999-09-06 | 2001-03-23 | Nippon Tele Net:Kk | 運転技能評価装置及びゲーム装置並びに運転技能評価機能付きゲーム装置 |
| JP2005010877A (ja) * | 2003-06-17 | 2005-01-13 | Daihatsu Motor Co Ltd | 運転状況判定装置及び運転状況判定方法 |
| JP4282072B2 (ja) * | 2004-09-30 | 2009-06-17 | 本田技研工業株式会社 | 二輪車の運転者負荷測定方法、装置およびプログラムならびにその記憶媒体 |
| EP1915748A2 (en) * | 2005-07-12 | 2008-04-30 | Eastern Virginia Medical School | System and method for automatic driver evaluation |
| JP4833776B2 (ja) * | 2006-09-06 | 2011-12-07 | 義大 須田 | 乗用移動車両 |
| JP4930356B2 (ja) * | 2007-12-14 | 2012-05-16 | 横浜ゴム株式会社 | 回転数検出システム |
-
2010
- 2010-11-16 JP JP2010255715A patent/JP5729538B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012106553A (ja) | 2012-06-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5729538B2 (ja) | 運転解析装置 | |
| CN109387203B (zh) | 活动状况分析装置、活动状况分析方法及记录介质 | |
| US10459002B2 (en) | Motion analysis method and motion analysis device | |
| US20110224012A1 (en) | Game Device Swing Detector | |
| US20140100049A1 (en) | Golf swing analyzing apparatus and method of analyzing golf swing | |
| JP6686985B2 (ja) | 軌跡推定装置、軌跡推定方法及び軌跡推定プログラム | |
| JP2013095306A (ja) | 自転車用電子システム及びプログラム | |
| US10175061B2 (en) | Method and apparatus to measure motion characteristics for bicycles and any vehicles on wheels | |
| EP4368469B1 (en) | Visual line movement-related value acquisition device, and transport apparatus equipped with same | |
| JP6645481B2 (ja) | 活動記録データ処理装置、活動記録データ処理方法及び活動記録データ処理プログラム | |
| US20220108627A1 (en) | Performance Coaching Apparatus and Method | |
| JP6446941B2 (ja) | 運動解析装置、方法、およびプログラム | |
| JP2012058066A (ja) | 球体の回転検出装置及び方法 | |
| KR101250247B1 (ko) | 바이크 시뮬레이터 시스템 및 방법 | |
| US20190232147A1 (en) | Sports apparatus for providing information | |
| JP7069662B2 (ja) | 電子機器、評価方法及びプログラム | |
| KR102246932B1 (ko) | 모터스포츠 주행 데이터 분석 서버 및 처리 시스템 | |
| JP2017029383A (ja) | 表示制御装置、方法、及びプログラム | |
| WO2016096454A1 (en) | Method for determining activity characteristics | |
| JP2021100453A (ja) | 情報処理装置、情報処理方法、プログラム | |
| JP6942958B2 (ja) | 運動解析装置、運動解析方法及びプログラム | |
| JP6791410B2 (ja) | 表示制御装置、方法、及びプログラム | |
| JP2021026189A (ja) | 車両のドリフト運転検知、評価方法及び装置 | |
| KR101548239B1 (ko) | 3축 가속도계를 이용한 자전거용 케이던스센서와 속도계 | |
| US11927505B2 (en) | Aerodynamic characteristic estimation device, aerodynamic characteristic estimation method and program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131107 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131107 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140424 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140430 |
|
| RD07 | Notification of extinguishment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7427 Effective date: 20140619 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140627 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20141015 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150114 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20150122 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150311 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150324 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5729538 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |