JP5774966B2 - 車両の障害物回避装置 - Google Patents
車両の障害物回避装置 Download PDFInfo
- Publication number
- JP5774966B2 JP5774966B2 JP2011246024A JP2011246024A JP5774966B2 JP 5774966 B2 JP5774966 B2 JP 5774966B2 JP 2011246024 A JP2011246024 A JP 2011246024A JP 2011246024 A JP2011246024 A JP 2011246024A JP 5774966 B2 JP5774966 B2 JP 5774966B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- obstacle
- avoidance
- lateral movement
- obstacle avoidance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Regulating Braking Force (AREA)
Description
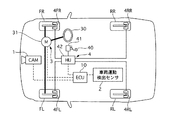
図1は、実施例1の障害物回避装置を搭載した車両のシステム構成を示す。車両は、左前輪FL、右前輪FR、左後輪RL、右後輪RRを備えた4輪車であり、自車の前方を認識する前方認識センサ1、自車の運動状態を検出する車両運動検出センサ2、及び各センサ1,2が取得した情報に基づき走行支援するため各種アクチュエータ(ステアリング制御機構3、ブレーキ制御機構4)へ指令を出力する電子制御ユニット(電子制御装置ECU)10を備える。前方認識センサ1は、前方の車線境界線(白線等のレーンマーク)の位置、及び前方の障害物(駐車車両や対向車両、歩行者や自転車、ガードレールや縁石等の道路構造物)を認識する手段であり、例えば、(単眼やステレオの)カメラや(レーザやミリ波の)レーダ等を用いることができる。実施例1では、前方認識センサ1としてカメラを備える。車両運動検出センサ2は、車両挙動を示す各種情報、すなわち車両の速度、前後加速度、横加速度、ヨーレート、操舵角、操舵トルクなどを検出する。なお、前後加速度を検出するセンサの代わりに、検出された車両の速度を時間微分して前後加速度を推定してもよい。
ステップS1では、障害物認識部11及び車線境界線認識部12が、車両運動検出センサ2から受信した車両の速度、前後加速度、横加速度、ヨーレート、操舵角、操舵トルクなどの車両運動状態の検出値を読み込む。また、前方認識センサ1から受信した車線境界線位置、障害物位置などの周辺環境情報を読み込む。図4に示すように、障害物の位置は車幅方向に平行な線分として認識され、車両からの奥行き方向での障害物の形状は不明である。その後、ステップS2に移行する。
ステップS2では、車両内部の任意の点、又は車両近傍の点を車両現在位置とする。車両現在位置は、後述するように左右の車線境界線との間で位置を比較するため、左右に2点設ける。実施例1では、図5に示すように、車両左前端と右前端を車両現在位置とする。そして、ステップS1で読み込んだ車両運動検出値と予め記憶されている車両諸元から、車両現在位置の所定時間後の位置を車両予測位置として算出する。車両予測位置は、速度、操舵角、ヨーレート、車両幅、車両長さ、カメラ取付け位置などから算出する。車両予測位置も、車両現在位置と同様、障害物との間で位置を比較するので、左右に2つ存在する。また、左右の車両現在位置から車両予測位置に至る軌跡を左右の車両軌跡とし、左右の車両現在位置を結ぶ線分と、左右の車両予測位置を結ぶ線分と、左右の車両軌跡で囲まれた領域を、図5に示すように通行予測領域とする。その後、ステップS3に移行する。
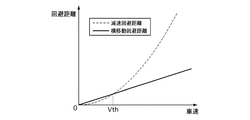
ここで、車両周辺に前方の1つの障害物しかない場合に、その障害物を減速で回避する場合と横移動で回避する場合を考える。前提条件として、回避動作開始時点で車両は前後方向にある車速で走行しており、回避動作中の車両の減速度と横加速度が等しく、一定であるとする。減速による障害物回避の開始時から車両が停止するまでの車両の前後方向の移動距離を減速回避距離とし、横移動による障害物回避の開始時から障害物の回避に必要な横移動が終了するまでの車両前後方向の移動距離を横移動回避距離とする。回避動作開始時の車速に応じた回避距離は図7のような特性を示す。図7から、車速が低いときは減速による回避が有効であり、車速が高いときは横移動による回避が有効であることが分かる。例えば、減速回避距離と横移動回避距離が等しくなる車速をVthとすると、障害物回避装置が車速Vth以上で動作した場合、車両周辺に前方の1つの障害物しかないときは、減速回避距離よりも横移動回避距離のほうが小さくなるため、減速による回避よりも横移動による回避が有効である。なお、回避動作中の減速度と横加速度が小さく、横移動による回避に必要な横移動量が小さい場合は、車速Vthが低くなる。以下のステップS5からS9の説明では、このような前提で、減速による回避と横移動による回避を選択する。
なお、このような条件では、ステップS8の減速による障害物回避での加速度とステップS9の横移動による障害物回避での加速度を比較すると、減速による障害物回避のほうが加速度は大きくなり、運転者には強い制御として感じられる。
また、通行予測領域で通行不可領域に含まれる部分のうち、車両前後方向で最も車両側にある領域に対して逐次回避動作が行われる。例えば図6のような場合、通行予測領域内の領域AC1,AC2が通行不可領域に含まれており、ステップS4で車両が障害物と接触する可能性があると判断されるが、ステップS5からS9の処理は領域AC1に対する回避動作となる。領域AC1に対する回避動作として、ステップS5からS7によってステップS9の横移動による障害物回避が選択された場合は、引き続き領域AC2に対する回避動作が行われる。
但し、自車が車線を逸脱している(車線境界線を跨いでいる)ときは、逸脱方向への横移動は禁止せず、その方向の横移動禁止フラグをクリアする(0とする)。つまり、左側車両現在位置が左側車線境界線より左にある場合は左側移動禁止フラグをクリアし、右側車両現在位置が右側車線境界線より右にある場合は右側移動禁止フラグをクリアする。
ここで、通行不可領域と車線境界線の間隔から横移動禁止を判断しており、通行不可領域1と通行不可領域2の間隔Wo1は横移動禁止判断には使用していない。これは、通行不可領域が図4のように算出されるので、通行不可領域1,2の車幅方向の間隔Wo1は必ず車幅Wvより大きくなっていることによる。
なお、ステップS1で車線境界線が認識されなかった等により回避幅を算出できないときは、その(回避幅を算出できなかった)方向の横移動禁止フラグをクリアする(0とする)。
その後、ステップS6に移行する。
まず、左側横移動量dlと右側横移動量drを算出する。図6に示すように、左側横移動量dlは右側車両軌跡から領域ACの左端までの横移動量の最大値であり、右側横移動量drは左側車両軌跡から領域ACの右端までの横移動量の最大値である。障害物回避に左側横移動が必要な場合は左側横移動量dlを正とし、障害物回避に左側横移動が不要な場合は左側横移動を0とする。右側についても同様である。図6の例では、左右の横移動量dl、drともに正となる。
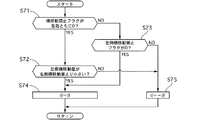
ステップS71で、左右の横移動禁止フラグがどちらも0のときは、ステップS72に移行する。左右の横移動禁止フラグのどちらかが1のときは、ステップS73に移行する。
ステップS72で、左側横移動量dlと右側横移動量drの大小を比較し、左側横移動量dlが右側横移動量drより小さいときはステップS74に移行する。左側横移動量dlが右側横移動量dr以上のときはステップS75に移行する。
ステップS73で、左側横移動禁止フラグが0のときはステップS74に移行する。左側横移動禁止フラグが1のときはステップS75に移行する。
ステップS74では必要横移動量d=dlとし、ステップS75では必要横移動量d=−drとする。
次に、必要横移動量dの絶対値が閾値d*以上の場合はステップS8に移行し、減速による回避を実行する。必要横移動量dの絶対値が閾値d*より小さい場合はステップS9に移行する。閾値d*は、横移動による障害物回避時の横移動量が大きくなりすぎることを抑制するための上限値であって、例えば自車の車幅Wvとすることができる。
以上が障害物回避制御の流れである。
次に、装置1の作用を説明する。障害物回避の具体的な動作について例を挙げて説明する。なお、図3のステップS7の必要横移動量dの絶対値の閾値d*は、以下の説明では車幅Wvとするが、実験などで他の値に調整してもよい。
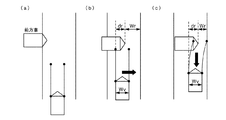
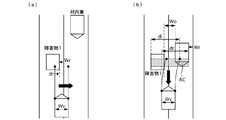
図9(a)では、車両予測位置が前方車の手前にあり、障害物回避は動作しない(図3のステップS1→S2→S3→S4→リターン)。そのまま自車と前方車が前進すると図9(b)のようになり、車両予測位置が前方車と重なるので、障害物回避が動作する(S1→S2→S3→S4→S5)。図9(b)では、前方車と右側車線境界線の間隔である右側回避幅Wrが車幅Wvより大きく、右側横移動量drが閾値d*(車幅Wv)より小さいので、右側横移動による障害物回避を行う(S5→S6→S7→S9)。更に、自車と前方車が前進すると、図9(c)のようになる。図9(c)では、図9(b)での右側横移動による回避動作にも関わらず、前方車が右方向に前進したために、右側横移動量drは大きく減少していない。右側回避幅Wrが車幅Wr以下となり、減速による障害物回避が行われる(S5→S6→S8)。
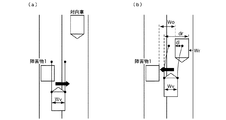
図11(a)で、左側の車線が認識されているとする。右側回避幅Wrが車幅Wv以下であるが、右側車両現在位置が右側車線境界線の外にある(自車が車線境界線を跨いで右側に車線を逸脱している)ので、右側横移動は禁止されない(S5→S6→S7)。また、右側横移動量drも閾値d*(車幅Wv)より小さいので、右側横移動による障害物回避動作が行われる(S7→S9)。その後、図11(b)のように対向車が接近し、障害物1と対向車の間隔Woが車幅Wv以下となると、障害物1と対向車によって通行不可領域が算出され(S3)、領域ACに対して以下のように障害物回避動作が行われる。すなわち、図11(a)では左側の車線が認識されているとしたが、図11(b)では右側の車線が認識されているとすると、まず、右側回避幅Wrが車幅Wv以下なので、右側横移動は禁止される。更に、左側車両現在位置が左側車線境界線の外にあるので、左側回避幅によって左側横移動は禁止されないが、左側横移動量dlが閾値d*(車幅Wv)以上であるので、減速による障害物回避動作が行われる(S5→S6→S7→S8)。
また、実施例1の装置は、自車前方の障害物を横移動によって回避するときの横移動量dl,drを左右両側について求め、必要横移動量dが閾値d*以上となる方向への横移動による障害物回避を禁止する。よって、図10(c)、図11(b)に示すように、過度な横方向移動を抑制し、より適切に障害物を回避することができる。
また、実施例1の装置は、上記2つの条件のどちらかによって左右両側ともに横移動による障害物回避が禁止された場合は減速により障害物を回避し、横移動による障害物回避が左右どちらかで可能であれば、横移動により障害物を回避する。その際、横移動による障害物回避が左右どちらでも可能であれば、横移動量dl,drが小さい方向への回避を行う(図8のステップS72→S74又はS75→S9)。よって、より少ない横移動量で障害物を回避し、より効率的に障害物を回避することができる。
以下、実施例1の車両の障害物回避装置が奏する効果を列挙する。
(1)自車両前方の障害物を認識する障害物認識部11と、自車両が走行している左右両側の車線の車線境界線を認識する車線境界線認識部12と、認識された障害物と認識された車線境界線との間隔Wl,Wrを認識する間隔認識部14と、認識された間隔Wl,Wrが予め設定された自車両の幅Wv以下である方向への横方向への障害物回避を禁止し、間隔Wl,Wrが自車両の幅Wvより大きい方向への横方向への障害物回避を許可し、自車両が認識された車線境界線を跨いで走行しているときには横方向への障害物回避を許可し、横方向への障害物回避が禁止された場合には車両を減速させる回避方向選択部15と、を備えた。
よって、減速による障害物回避と横移動による障害物回避とを適切に選択することができる。
よって、より少ない横方向移動量で障害物を回避することができる。
よって、過度な横方向移動を抑制することができる。
以上、本発明を実現するための形態を、実施例1に基づいて説明してきたが、本発明の具体的な構成は実施例1に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても、本発明に含まれる。例えば、パワーステアリング装置は電動式に限らず、電動油圧式でもよい。また、車両にヨーモーメントを付与する手段としてのステアリング制御機構3又はブレーキ制御機構4は、実施例1のものに限定されず、例えばステア・バイ・ワイヤ式のステアリングシステムやブレーキ・バイ・ワイヤ式のブレーキシステムを用いてもよい。
2 車両運動検出センサ
3 ステアリング制御機構
4 ブレーキ制御機構
10 電子制御ユニット
11 障害物認識部
12 車線境界線認識部
13 接触判断部
14 間隔認識部
15 回避方向選択部
Claims (3)
- 自車両前方の障害物を認識する障害物認識部と、
自車両が走行している左右両側の車線の車線境界線を認識する車線境界線認識部と、
前記認識された障害物と前記認識された車線境界線との間隔を認識する間隔認識部と、
前記認識された間隔が予め設定された自車両の幅以下である方向への横方向への障害物回避を禁止し、自車両の幅より大きい方向への横方向への障害物回避を許可し、
自車両が前記認識された車線境界線を跨いで走行しているときには、前記認識された間隔が自車両の幅以下であるか否かに関わらず横方向への障害物回避を許可し、
前記横方向への障害物回避が禁止された場合には車両を減速させる
回避方向選択部と、を備えた
ことを特徴とする車両の障害物回避装置。
- 請求項1に記載の車両の障害物回避装置において、
前記回避方向選択部は、前記間隔認識部により認識された左右の間隔がいずれも前記自車両の幅より大きい場合には、横方向の移動量の小さな方向への障害物回避を許可することを特徴とする車両の障害物回避装置。 - 請求項1又は2に記載の車両の障害物回避装置において、
前記回避方向選択部は、前記横方向への障害物回避を許可した場合、算出される横方向の移動量が所定の閾値以上であるときは、前記横方向への障害物回避を行わずに車両を減速させることを特徴とする車両の障害物回避装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011246024A JP5774966B2 (ja) | 2011-11-10 | 2011-11-10 | 車両の障害物回避装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011246024A JP5774966B2 (ja) | 2011-11-10 | 2011-11-10 | 車両の障害物回避装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013100064A JP2013100064A (ja) | 2013-05-23 |
| JP5774966B2 true JP5774966B2 (ja) | 2015-09-09 |
Family
ID=48621164
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011246024A Active JP5774966B2 (ja) | 2011-11-10 | 2011-11-10 | 車両の障害物回避装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5774966B2 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6280850B2 (ja) * | 2014-09-29 | 2018-02-14 | 日立建機株式会社 | 障害物回避システム |
| JP6423822B2 (ja) * | 2016-06-23 | 2018-11-14 | 本田技研工業株式会社 | 車両制御装置 |
| KR102039487B1 (ko) * | 2016-11-11 | 2019-11-26 | 엘지전자 주식회사 | 차량 주행 제어 장치 및 방법 |
| JP2018089990A (ja) * | 2016-11-30 | 2018-06-14 | 三菱自動車工業株式会社 | 運転支援装置 |
| JP6859902B2 (ja) | 2017-08-31 | 2021-04-14 | トヨタ自動車株式会社 | 車両制御装置 |
| KR102383524B1 (ko) * | 2017-11-03 | 2022-04-06 | 현대자동차주식회사 | 하이브리드 차량 및 그 제어 방법 |
| GB2578916B (en) * | 2018-11-14 | 2021-05-12 | Jaguar Land Rover Ltd | Vehicle in-lane position control system and method |
| KR102699260B1 (ko) * | 2019-05-27 | 2024-08-28 | 현대자동차주식회사 | 차량 및 그 제어방법 |
| CN110979318B (zh) * | 2019-11-20 | 2021-06-04 | 苏州智加科技有限公司 | 车道信息获取方法、装置、自动驾驶车辆及存储介质 |
| JP7648423B2 (ja) * | 2021-03-31 | 2025-03-18 | 本田技研工業株式会社 | 車両制御装置及び車両、並びに、車両制御装置の制御方法及びプログラム |
| JP7705265B2 (ja) | 2021-03-31 | 2025-07-09 | 本田技研工業株式会社 | 車両制御装置及び車両、並びに、車両制御装置の制御方法及びプログラム |
| WO2023276919A1 (ja) | 2021-06-30 | 2023-01-05 | 株式会社アイシン | 自動制動制御装置及び自動制動処理プログラム |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002248965A (ja) * | 2001-02-26 | 2002-09-03 | Nissan Motor Co Ltd | 車輌用走行制御装置 |
| JP2005182753A (ja) * | 2003-11-28 | 2005-07-07 | Denso Corp | 車両運転支援装置 |
| JP2006273252A (ja) * | 2005-03-30 | 2006-10-12 | Mitsubishi Fuso Truck & Bus Corp | 車両用衝突防止制御装置 |
| JP5272448B2 (ja) * | 2008-03-04 | 2013-08-28 | 日産自動車株式会社 | 車両用運転支援装置及び車両用運転支援方法 |
| JP5174609B2 (ja) * | 2008-10-10 | 2013-04-03 | 日立オートモティブシステムズ株式会社 | 走行支援装置 |
| JP5262986B2 (ja) * | 2009-03-05 | 2013-08-14 | 日産自動車株式会社 | 走行経路生成装置、走行経路生成方法、及び運転操作支援装置 |
| JP2011108016A (ja) * | 2009-11-18 | 2011-06-02 | Toyota Motor Corp | 走行支援装置 |
| JP5463971B2 (ja) * | 2010-03-10 | 2014-04-09 | 日産自動車株式会社 | 移動体走行経路生成装置 |
-
2011
- 2011-11-10 JP JP2011246024A patent/JP5774966B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013100064A (ja) | 2013-05-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5774966B2 (ja) | 車両の障害物回避装置 | |
| JP6470039B2 (ja) | 車両制御システム | |
| CN103858155B (zh) | 车辆的驾驶支援系统 | |
| JP6108974B2 (ja) | 車両制御システム | |
| JP6568759B2 (ja) | 車線変更システム | |
| KR101864938B1 (ko) | 충돌 회피 지원 장치 | |
| JP5300357B2 (ja) | 衝突防止支援装置 | |
| CN105263768B (zh) | 车辆控制系统 | |
| JP6532786B2 (ja) | 車両走行制御装置及び速度制御方法 | |
| JP6049542B2 (ja) | 車両制御システム | |
| JP4759547B2 (ja) | 走行支援装置 | |
| CN105263776B (zh) | 车辆控制系统 | |
| CN105492280B (zh) | 车辆控制系统 | |
| CN113264041A (zh) | 碰撞回避支援装置 | |
| CN111770865A (zh) | 车辆行驶控制装置 | |
| JP5824968B2 (ja) | 走行制御装置 | |
| JP2019137139A (ja) | 車両制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131216 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140925 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141118 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141219 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150623 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150702 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5774966 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |