JP5778894B2 - 昇降装置 - Google Patents
昇降装置 Download PDFInfo
- Publication number
- JP5778894B2 JP5778894B2 JP2010093111A JP2010093111A JP5778894B2 JP 5778894 B2 JP5778894 B2 JP 5778894B2 JP 2010093111 A JP2010093111 A JP 2010093111A JP 2010093111 A JP2010093111 A JP 2010093111A JP 5778894 B2 JP5778894 B2 JP 5778894B2
- Authority
- JP
- Japan
- Prior art keywords
- cam
- driven member
- cam surface
- main body
- followers
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000005484 gravity Effects 0.000 claims description 9
- 230000003028 elevating effect Effects 0.000 claims description 3
- 230000000630 rising effect Effects 0.000 description 4
- 230000007613 environmental effect Effects 0.000 description 2
- 238000010438 heat treatment Methods 0.000 description 2
- 230000001174 ascending effect Effects 0.000 description 1
- 238000005255 carburizing Methods 0.000 description 1
- 238000010791 quenching Methods 0.000 description 1
- 230000000171 quenching effect Effects 0.000 description 1
Images


Landscapes
- Transmission Devices (AREA)
Description
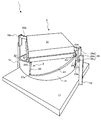
2 カム部材
3 従動部材
11 ベース
12 ガイドレール
21 筒体
22〜25 カム面
22a〜25a 始点
22b〜25b 終点
26 立ち上がり部
31 本体
32〜34 フォロア
36 ガイド
36a 腕部
36b 板部
36c ガイドローラ
Claims (5)
- 横断面が円形の筒体であり、その筒体の上端面の一部がカム面となっており、前記筒体の軸線回りに回動自在となっているカム部材と、
前記カム部材の筒体の内側に配置される本体とこの本体から放射状に延出し前記カム面と接触するフォロアとを有する従動部材とを備え、
従動部材が最も低い位置にあるときは、従動部材の本体がカム部材である回動自在の筒体の内側に収容された状態となることを特徴とする昇降装置。 - 前記昇降装置は、前記従動部材を昇降方向に案内するガイド機構を備えることを特徴とする請求項1に記載の昇降装置。
- 前記カム部材の横断面である円の中心と前記従動部材の重心とが上面視で同一位置にあることを特徴とする請求項1又は2に記載の昇降装置。
- 前記筒体の上端面は、始点と終点とを有するカム面が複数回繰り返された形状となっており、
前記従動部材は、前記カム面の繰り返し回数と同数のフォロアを有し、
一つのカム面に一つのフォロアが接触するようになっていることを特徴とする請求項1乃至3のいずれかに記載の昇降装置。 - 複数の前記カム面の始点は、上面視でカム部材の横断面である円の中心回りに、360度を前記カム面の繰り返し回数で割った角度ごとに位置するようになっており、
複数の前記フォロアは、上面視で前記従動部材の重心回りに前記角度ごとに本体から延出するように設けられていることを特徴とする請求項4に記載の昇降装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010093111A JP5778894B2 (ja) | 2010-04-14 | 2010-04-14 | 昇降装置 |
| CN2010105832241A CN102020221A (zh) | 2010-04-14 | 2010-11-30 | 升降装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010093111A JP5778894B2 (ja) | 2010-04-14 | 2010-04-14 | 昇降装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011219261A JP2011219261A (ja) | 2011-11-04 |
| JP5778894B2 true JP5778894B2 (ja) | 2015-09-16 |
Family
ID=43862053
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010093111A Expired - Fee Related JP5778894B2 (ja) | 2010-04-14 | 2010-04-14 | 昇降装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP5778894B2 (ja) |
| CN (1) | CN102020221A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112062045A (zh) * | 2020-09-17 | 2020-12-11 | 杭州海康机器人技术有限公司 | 旋转举升装置 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105966291B (zh) * | 2016-06-21 | 2018-03-06 | 沈阳霹雳科技有限公司 | 一种运输车的货物方位调节装置 |
| CN109879203A (zh) * | 2019-04-23 | 2019-06-14 | 北京旷视机器人技术有限公司 | 举升机构及具有其的搬运机器人 |
| CN111941132A (zh) * | 2020-08-19 | 2020-11-17 | 徐玉芝 | 一种稳定式铸件加工用机械提升装置 |
| CN112092049B (zh) * | 2020-09-02 | 2022-01-25 | 安徽万朗磁塑股份有限公司 | 一种凸轮式双切割片冰箱门封切割装置 |
| CN112296932B (zh) * | 2020-10-30 | 2022-05-03 | 东风设备制造有限公司 | 一种零件脱开定位销抬起装置 |
| CN114684968B (zh) * | 2022-04-06 | 2023-06-16 | 何永雪 | 一种便捷家居式水处理环保装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3884128A (en) * | 1972-07-06 | 1975-05-20 | Dura Corp | Combination centering bearing and stop for car lift pistons |
| JPS5546671Y2 (ja) * | 1976-12-01 | 1980-11-01 | ||
| CN2160845Y (zh) * | 1992-10-26 | 1994-04-06 | 魏德芳 | 燃气炉具节能装置 |
| JPH06226694A (ja) * | 1993-02-02 | 1994-08-16 | Aiseru Kk | シート類移送方法およびこれを実施する装置 |
| CN1164750A (zh) * | 1996-05-05 | 1997-11-12 | 张雄伟 | 断电延时电灯开关 |
| JP2003285994A (ja) * | 2002-03-28 | 2003-10-07 | Hirata Corp | 昇降装置 |
| CN1451600A (zh) * | 2003-05-26 | 2003-10-29 | 刘文杰 | 升降物体的方法及使用该方法的升降装置 |
| JP2006021927A (ja) * | 2004-07-09 | 2006-01-26 | Hiromasa Kitaguchi | 昇降装置 |
| JP5022855B2 (ja) * | 2007-10-05 | 2012-09-12 | 古河機械金属株式会社 | リフトピン機構、加熱処理装置、減圧乾燥装置 |
| CN201128424Y (zh) * | 2007-11-23 | 2008-10-08 | 宝山钢铁股份有限公司 | 无源升降工具小车 |
-
2010
- 2010-04-14 JP JP2010093111A patent/JP5778894B2/ja not_active Expired - Fee Related
- 2010-11-30 CN CN2010105832241A patent/CN102020221A/zh active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112062045A (zh) * | 2020-09-17 | 2020-12-11 | 杭州海康机器人技术有限公司 | 旋转举升装置 |
| CN112062045B (zh) * | 2020-09-17 | 2021-10-29 | 杭州海康机器人技术有限公司 | 旋转举升装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011219261A (ja) | 2011-11-04 |
| CN102020221A (zh) | 2011-04-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5778894B2 (ja) | 昇降装置 | |
| JP6706745B2 (ja) | 移載装置 | |
| JP6564986B2 (ja) | 搬送物排出装置 | |
| JP2016175735A (ja) | 搬送機構 | |
| CN102200495B (zh) | 新型采样机构 | |
| KR102722164B1 (ko) | 레일에 의하여 승하강 가능한 전동 침대 | |
| JP2017036628A (ja) | 分割扉構造 | |
| JP2014084562A (ja) | フォークパーキングのトレイ横行装置 | |
| CN116676945A (zh) | 一种海上风电安装作业平台用固桩架 | |
| CN110626721A (zh) | 一种推箱机构 | |
| KR101328574B1 (ko) | 기판이송장치 | |
| JP2012250809A (ja) | 移載装置およびコンベア装置 | |
| JP2019034834A (ja) | 無人搬送車 | |
| CN206633579U (zh) | 一种网架升降装置和具有该装置的网版印刷机 | |
| CN102728056B (zh) | 推动牌处于储牌槽居中位置的复合传动装置 | |
| CN201082831Y (zh) | 一种垛盘输送控制装置 | |
| CN219156398U (zh) | 一种倍速转运升降装置 | |
| CN218908962U (zh) | 阻挡顶升定位旋转机构及产品输送线 | |
| CN203792142U (zh) | 曲面抛光机的同步装置 | |
| CN102743867B (zh) | 推动牌处于储牌槽居中位置的传动机构 | |
| CN106704502B (zh) | 一种螺栓锁紧式刚性链条推拉执行机构 | |
| CN211585182U (zh) | 一种麻将机的抬升装置 | |
| JP2015112674A (ja) | 昇降ガイド、昇降装置、これを備えた搬送装置 | |
| JP3164195U (ja) | 昇降装置 | |
| KR20200067874A (ko) | 추력 승강 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130221 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140225 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140404 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140930 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141110 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150623 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150710 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5778894 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |