JP5797355B2 - 超音波プローブ及び超音波処置装置 - Google Patents
超音波プローブ及び超音波処置装置 Download PDFInfo
- Publication number
- JP5797355B2 JP5797355B2 JP2015515060A JP2015515060A JP5797355B2 JP 5797355 B2 JP5797355 B2 JP 5797355B2 JP 2015515060 A JP2015515060 A JP 2015515060A JP 2015515060 A JP2015515060 A JP 2015515060A JP 5797355 B2 JP5797355 B2 JP 5797355B2
- Authority
- JP
- Japan
- Prior art keywords
- probe
- vertical direction
- cross
- bending
- section
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- UBGALMSTAMLBLW-UHFFFAOYSA-N C=CCC1=CCC=C1 Chemical compound C=CCC1=CCC=C1 UBGALMSTAMLBLW-UHFFFAOYSA-N 0.000 description 1
Images





















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B17/320092—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/28—Surgical forceps
- A61B17/2812—Surgical forceps with a single pivotal connection
- A61B17/282—Jaws
- A61B2017/2825—Inserts of different material in jaws
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2945—Curved jaws
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320069—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic for ablating tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320071—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with articulating means for working tip
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320072—Working tips with special features, e.g. extending parts
- A61B2017/320074—Working tips with special features, e.g. extending parts blade
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320089—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic node location
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B17/320092—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw
- A61B2017/320094—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw additional movable means performing clamping operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B17/320092—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw
- A61B2017/320095—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw with sealing or cauterizing means
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Mechanical Engineering (AREA)
- Biomedical Technology (AREA)
- Dentistry (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgical Instruments (AREA)
Description
本発明の第1の実施形態について、図1乃至図14を参照して説明する。
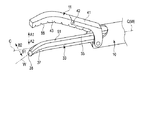
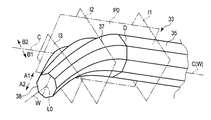
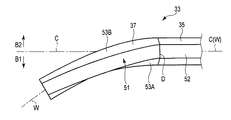
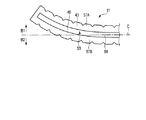
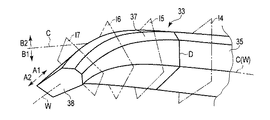
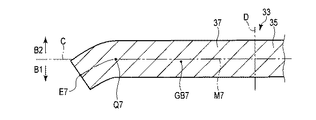
なお、第1の実施形態では、重心軸Wに垂直ないずれの断面においても、第2の横断面半分重心VB2が横断面重心Vに対して第1の湾曲方向側にずれることはないが、これに限るものではない。例えば、図15乃至図19を参照して、第1の実施形態の第1の変形例を説明する。図15は、本変形例の先端処置部33の構成を示す図である。図16乃至図19は、先端処置部33を重心軸Wに垂直な断面(横断面)で示す図である。図16は、図15の断面I4を示し、図17は、図15の断面I5を示し、図18は、図15の断面I6を示し、図19は、図15の断面I7を示している。断面I4は、境界Dより基端方向側の断面であり、断面I5、断面I6及び断面I7は、境界Dより先端方向側の断面である。また、断面I6は、断面I5より先端方向側に位置し、断面I7は、断面I6より先端方向側に位置している。なお、横断面重心V、第1の横断面半分重心VA及び第2の横断面半分重心VBの定義は、第1の実施形態と同様である。
また、超音波凝固切開装置である超音波処置装置1とは異なる超音波処置装置71に超音波プローブ31を適用した第2の実施形態を、図26乃至図28を参照として説明する。なお、以下の説明では、第1の実施形態と同一の部分については、同一の符号を付して、その説明は省略する。
なお、超音波処置装置71のようなジョー11が設けられない超音波切除装置において、超音波プローブ31のプローブ湾曲部37を、第1の実施形態、第1の実施形態の第1の変形例乃至第3の変形例のいずれか1つの形状にしてもよい。また、超音波プローブ31のプローブ湾曲部37は、第1の湾曲方向及び第2の湾曲方向について湾曲するフック状に形成されてもよい。プローブ湾曲部37がフック状に形成される場合でも、第1の垂直方向及び第2の垂直方向に垂直な断面でのプローブ湾曲部37の断面形状は、第1の垂直方向及び第2の垂直方向に沿って、連続的に変化する。そして、プローブ湾曲部37の断面重心は、第1の垂直方向から第2の垂直方向へ向かうにつれて、第2の湾曲方向側に位置している。
以上、前述の各変形例を含む第1の実施形態及び変形例を含む第2の実施形態から、超音波プローブ31は、長手軸Cを中心として長手軸Cに沿って延設され、基端方向(C2)から先端方向(C1)へ長手軸Cに沿って超音波振動を伝達するプローブ本体部35と、プローブ本体部35の先端方向(C1)側に設けられる、プローブ湾曲部37と、を備える。長手軸Cに垂直なある1つの方向を第1の湾曲方向(B1)とし、第1の湾曲方向(B1)とは反対方向を第2の湾曲方向(B2)とした場合に、長手軸Cより第1の湾曲方向(B1)側にプローブ湾曲部37の重心GBが位置する状態に、第1の湾曲方向(B1)及び第2の湾曲方向(B2)についてプローブ本体部35に対してプローブ湾曲部37は湾曲する。そして、長手軸Cに垂直かつ第1の湾曲方向(B1)及び第2の湾曲方向(B2)に垂直な方向の一方を第1の垂直方向(A1)とし、第1の垂直方向(A1)とは反対方向を第2の垂直方向(A2)とした場合に、第1の垂直方向(A1)から第2の垂直方向(A2)に向かうにつれて第1の垂直方向(A1)及び第2の垂直方向(A2)に垂直な断面でのプローブ湾曲部37の断面重心(GB1〜GB3;GB4,GB5;GB6,GB7;GB8,GB9)が第2の湾曲方向(B2)側に位置する状態に、第1の垂直方向(A1)及び第2の垂直方向(A2)に沿って第1の垂直方向(A1)及び第2の垂直方向(A2)に垂直な断面でのプローブ湾曲部37の断面形状が連続的に変化する。
Claims (6)
- 長手軸を中心として前記長手軸に沿って延設され、基端方向から先端方向へ前記長手軸に沿って超音波振動を伝達するプローブ本体部と、
前記プローブ本体部の前記先端方向側に設けられ、前記長手軸に垂直なある1つの方向を第1の湾曲方向とし、前記第1の湾曲方向とは反対方向を第2の湾曲方向とした場合に、前記長手軸より前記第1の湾曲方向側に重心が位置する状態に、前記第1の湾曲方向及び前記第2の湾曲方向について前記プローブ本体部に対して湾曲するプローブ湾曲部であって、前記長手軸に垂直かつ前記第1の湾曲方向及び前記第2の湾曲方向に垂直な方向の一方を第1の垂直方向とし、前記第1の垂直方向とは反対方向を第2の垂直方向とした場合に、前記第1の垂直方向から前記第2の垂直方向に向かうにつれて前記第1の垂直方向及び前記第2の垂直方向に垂直な断面での前記プローブ湾曲部の断面重心が前記第2の湾曲方向側に位置する状態に、前記第1の垂直方向及び前記第2の垂直方向に沿って前記第1の垂直方向及び前記第2の垂直方向に垂直な前記断面での前記プローブ湾曲部の断面形状が連続的に変化する、プローブ湾曲部と、
を具備する超音波プローブ。 - 前記プローブ湾曲部は、前記第1の垂直方向及び前記第2の垂直方向に垂直な前記断面において、前記第1の湾曲方向及び前記第2の湾曲方向について前記超音波プローブの中央位置を通る断面中央軸を規定した場合に、前記第1の垂直方向から前記第2の垂直方向に向かうにつれて前記断面中央軸の曲率が大きくなる状態に、前記第1の湾曲方向に湾曲し、
前記プローブ湾曲部は、前記第1の垂直方向から前記第2の垂直方向に向かうにつれて、前記断面中央軸の延設方向が前記長手軸に平行でなくなる軸湾曲基端が、前記先端方向側に位置する、
請求項1の超音波プローブ。 - 前記プローブ湾曲部は、前記超音波プローブの先端を形成する先端面であって、前記先端面において前記第1の湾曲方向及び前記第2の湾曲方向について前記超音波プローブの前記中央位置を通る先端面中央線を規定した場合に、前記先端面中央線は前記第1の垂直方向及び前記第2の垂直方向に平行である先端面を、備える、請求項1の超音波プローブ。
- 請求項1の前記超音波プローブと、
前記長手軸に沿って延設され、前記超音波プローブが挿通されるシースと、
前記シースに対して回動可能に取付けられるジョーと、
を具備し、
前記超音波プローブは、前記プローブ湾曲部が位置し、前記シースから前記先端方向へ突出する先端処置部であって、前記第1の垂直方向がジョー開方向となり、かつ、前記第2の垂直方向がジョー閉方向となる状態で、前記ジョーが前記先端処置部に対して開動作又は閉動作する先端処置部を備える、
超音波処置装置。 - 前記先端処置部は、前記第1の垂直方向を向く状態で前記ジョーと対向するプローブ側対向部であって、前記プローブ湾曲部において前記第1の湾曲方向及び前記第2の湾曲方向について湾曲することにより、第1の湾曲形状を形成するプローブ側対向部を備え、
前記ジョーは、前記第2の垂直方向を向く状態で前記プローブ側対向部と対向し、前記ジョーを前記先端処置部に対して閉じた状態で、前記プローブ側対向部に当接可能なジョー側対向部であって、前記プローブ側対向部と対向する状態に前記第1の湾曲方向及び前記第2の湾曲方向について湾曲することにより、前記第1の湾曲形状に対応する第2の湾曲形状を形成するジョー側対向部を備える、
請求項4の超音波処置装置。 - 前記先端処置部は、
前記第1の垂直方向を向く状態で前記ジョーと対向するプローブ側対向部と、
前記第1の湾曲方向を向く状態で前記プローブ側対向部の前記第2の垂直方向側に連続し、前記第2の垂直方向から前記第2の湾曲方向に向かって鋭角の第1の角度だけ傾斜した第1の傾斜方向に向かって前記プローブ側対向部から延設される第1の傾斜面と、
前記第2の湾曲方向を向く状態で前記プローブ側対向部の前記第2の垂直方向側に連続し、前記第2の垂直方向から前記第1の湾曲方向に向かって鋭角の第2の角度だけ傾斜した第2の傾斜方向に向かって前記プローブ側対向部から延設される第2の傾斜面と、
前記第2の垂直方向を向く状態で前記第1の傾斜面と前記第2の傾斜面との間を連続させる中継面と、
を備える請求項4の超音波処置装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015515060A JP5797355B2 (ja) | 2013-06-07 | 2014-06-06 | 超音波プローブ及び超音波処置装置 |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013121019 | 2013-06-07 | ||
| JP2013121019 | 2013-06-07 | ||
| PCT/JP2014/065132 WO2014196640A1 (ja) | 2013-06-07 | 2014-06-06 | 超音波プローブ及び超音波処置装置 |
| JP2015515060A JP5797355B2 (ja) | 2013-06-07 | 2014-06-06 | 超音波プローブ及び超音波処置装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP5797355B2 true JP5797355B2 (ja) | 2015-10-21 |
| JPWO2014196640A1 JPWO2014196640A1 (ja) | 2017-02-23 |
Family
ID=52008269
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015515060A Active JP5797355B2 (ja) | 2013-06-07 | 2014-06-06 | 超音波プローブ及び超音波処置装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9445833B2 (ja) |
| EP (1) | EP3005965B1 (ja) |
| JP (1) | JP5797355B2 (ja) |
| CN (1) | CN105338916B (ja) |
| WO (1) | WO2014196640A1 (ja) |
Families Citing this family (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8182501B2 (en) | 2004-02-27 | 2012-05-22 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical shears and method for sealing a blood vessel using same |
| ES2598134T3 (es) | 2004-10-08 | 2017-01-25 | Ethicon Endo-Surgery, Llc | Instrumento ultrasónico quirúrgico |
| US20070191713A1 (en) | 2005-10-14 | 2007-08-16 | Eichmann Stephen E | Ultrasonic device for cutting and coagulating |
| US7621930B2 (en) | 2006-01-20 | 2009-11-24 | Ethicon Endo-Surgery, Inc. | Ultrasound medical instrument having a medical ultrasonic blade |
| US8142461B2 (en) | 2007-03-22 | 2012-03-27 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| US8057498B2 (en) | 2007-11-30 | 2011-11-15 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instrument blades |
| US8911460B2 (en) | 2007-03-22 | 2014-12-16 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US8523889B2 (en) | 2007-07-27 | 2013-09-03 | Ethicon Endo-Surgery, Inc. | Ultrasonic end effectors with increased active length |
| US8808319B2 (en) | 2007-07-27 | 2014-08-19 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| US8430898B2 (en) | 2007-07-31 | 2013-04-30 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US8512365B2 (en) | 2007-07-31 | 2013-08-20 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| US9044261B2 (en) | 2007-07-31 | 2015-06-02 | Ethicon Endo-Surgery, Inc. | Temperature controlled ultrasonic surgical instruments |
| CA2701962C (en) | 2007-10-05 | 2016-05-31 | Ethicon Endo-Surgery, Inc. | Ergonomic surgical instruments |
| US10010339B2 (en) | 2007-11-30 | 2018-07-03 | Ethicon Llc | Ultrasonic surgical blades |
| US9700339B2 (en) | 2009-05-20 | 2017-07-11 | Ethicon Endo-Surgery, Inc. | Coupling arrangements and methods for attaching tools to ultrasonic surgical instruments |
| US8486096B2 (en) | 2010-02-11 | 2013-07-16 | Ethicon Endo-Surgery, Inc. | Dual purpose surgical instrument for cutting and coagulating tissue |
| US8951272B2 (en) | 2010-02-11 | 2015-02-10 | Ethicon Endo-Surgery, Inc. | Seal arrangements for ultrasonically powered surgical instruments |
| US9820768B2 (en) | 2012-06-29 | 2017-11-21 | Ethicon Llc | Ultrasonic surgical instruments with control mechanisms |
| US10226273B2 (en) | 2013-03-14 | 2019-03-12 | Ethicon Llc | Mechanical fasteners for use with surgical energy devices |
| WO2015064702A1 (ja) * | 2013-11-01 | 2015-05-07 | オリンパスメディカルシステムズ株式会社 | 超音波プローブ及び超音波処置装置 |
| GB2521229A (en) | 2013-12-16 | 2015-06-17 | Ethicon Endo Surgery Inc | Medical device |
| JP6001213B1 (ja) * | 2015-01-07 | 2016-10-05 | オリンパス株式会社 | 超音波プローブ |
| WO2016197348A1 (zh) * | 2015-06-10 | 2016-12-15 | 深圳迈瑞生物医疗电子股份有限公司 | 一种超声外科手术装置及端部执行器 |
| US11020140B2 (en) | 2015-06-17 | 2021-06-01 | Cilag Gmbh International | Ultrasonic surgical blade for use with ultrasonic surgical instruments |
| US10357303B2 (en) | 2015-06-30 | 2019-07-23 | Ethicon Llc | Translatable outer tube for sealing using shielded lap chole dissector |
| WO2017027853A1 (en) * | 2015-08-12 | 2017-02-16 | Reach Surgical, Inc. | Curved ultrasonic surgical blade |
| CN107920838B (zh) * | 2015-09-17 | 2020-08-21 | 奥林巴斯株式会社 | 抓持处置器具 |
| US10245064B2 (en) | 2016-07-12 | 2019-04-02 | Ethicon Llc | Ultrasonic surgical instrument with piezoelectric central lumen transducer |
| US10893883B2 (en) | 2016-07-13 | 2021-01-19 | Ethicon Llc | Ultrasonic assembly for use with ultrasonic surgical instruments |
| US10842522B2 (en) | 2016-07-15 | 2020-11-24 | Ethicon Llc | Ultrasonic surgical instruments having offset blades |
| USD847990S1 (en) | 2016-08-16 | 2019-05-07 | Ethicon Llc | Surgical instrument |
| US10952759B2 (en) | 2016-08-25 | 2021-03-23 | Ethicon Llc | Tissue loading of a surgical instrument |
| US10779847B2 (en) | 2016-08-25 | 2020-09-22 | Ethicon Llc | Ultrasonic transducer to waveguide joining |
| US10603064B2 (en) | 2016-11-28 | 2020-03-31 | Ethicon Llc | Ultrasonic transducer |
| US10820920B2 (en) | 2017-07-05 | 2020-11-03 | Ethicon Llc | Reusable ultrasonic medical devices and methods of their use |
| US11678928B2 (en) | 2019-01-10 | 2023-06-20 | Atricure, Inc. | Surgical clamp |
| USD974558S1 (en) | 2020-12-18 | 2023-01-03 | Stryker European Operations Limited | Ultrasonic knife |
| US12171454B2 (en) * | 2021-02-25 | 2024-12-24 | Olympus Corporation | Curved ultrasonic transmission member having improved vibration control |
| CN117618074A (zh) * | 2022-08-17 | 2024-03-01 | 天津瑞奇外科器械股份有限公司 | 一种用于口腔颌面手术的超声外科器械 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000070279A (ja) * | 1998-06-29 | 2000-03-07 | Ethicon Endo Surgery Inc | 非対称形の超音波外科手術ブレ―ドを平衡化する方法 |
| JP2009160404A (ja) * | 2007-12-28 | 2009-07-23 | Olympus Medical Systems Corp | 外科手術装置 |
| JP2011500161A (ja) * | 2007-10-10 | 2011-01-06 | エシコン・エンド−サージェリィ・インコーポレイテッド | 切断及び凝固のための超音波装置 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3152753B2 (ja) * | 1992-08-19 | 2001-04-03 | オリンパス光学工業株式会社 | 体腔内超音波プローブ |
| US5413107A (en) * | 1994-02-16 | 1995-05-09 | Tetrad Corporation | Ultrasonic probe having articulated structure and rotatable transducer head |
| WO1999035982A1 (en) * | 1998-01-19 | 1999-07-22 | Michael John Radley Young | Ultrasonic cutting tool |
| US6660017B2 (en) * | 1998-06-29 | 2003-12-09 | Ethicon Endo-Surgery, Inc. | Balanced ultrasonic blade including a singular balance asymmetry |
| US20030212331A1 (en) * | 2002-05-13 | 2003-11-13 | Paul Fenton | Ultrasonic soft tissue cutting and coagulation systems having multiple superposed vibrational modes |
| US20050234484A1 (en) * | 2004-02-27 | 2005-10-20 | Houser Kevin L | Ultrasonic surgical blade having transverse and longitudinal vibration |
| US20060190003A1 (en) * | 2005-02-18 | 2006-08-24 | Alcon, Inc. | Surgical method |
| CN100522086C (zh) * | 2005-02-28 | 2009-08-05 | 奥林巴斯株式会社 | 超声波处置装置 |
| US20060211943A1 (en) * | 2005-03-15 | 2006-09-21 | Crescendo Technologies, Llc | Ultrasonic blade with terminal end balance features |
| US7879056B2 (en) | 2007-10-11 | 2011-02-01 | Keith Butterfield | Pleurabrade device |
| US20090270891A1 (en) * | 2008-04-18 | 2009-10-29 | Jean Michael Beaupre | Balanced ultrasonic curved blade |
| US8801737B2 (en) * | 2008-10-31 | 2014-08-12 | Art, Limited | Apparatus and method for phacoemulsification |
| WO2012132860A1 (ja) * | 2011-03-28 | 2012-10-04 | オリンパスメディカルシステムズ株式会社 | 超音波処置装置 |
| WO2014045667A1 (ja) * | 2012-09-24 | 2014-03-27 | オリンパスメディカルシステムズ株式会社 | 超音波作動ユニット及び超音波処置装置 |
| CN105246423B (zh) * | 2013-08-29 | 2017-11-14 | 奥林巴斯株式会社 | 把持处理装置和把持单元 |
-
2014
- 2014-06-06 JP JP2015515060A patent/JP5797355B2/ja active Active
- 2014-06-06 WO PCT/JP2014/065132 patent/WO2014196640A1/ja not_active Ceased
- 2014-06-06 EP EP14807881.9A patent/EP3005965B1/en active Active
- 2014-06-06 CN CN201480032603.8A patent/CN105338916B/zh active Active
-
2015
- 2015-11-12 US US14/939,766 patent/US9445833B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000070279A (ja) * | 1998-06-29 | 2000-03-07 | Ethicon Endo Surgery Inc | 非対称形の超音波外科手術ブレ―ドを平衡化する方法 |
| JP2011500161A (ja) * | 2007-10-10 | 2011-01-06 | エシコン・エンド−サージェリィ・インコーポレイテッド | 切断及び凝固のための超音波装置 |
| JP2009160404A (ja) * | 2007-12-28 | 2009-07-23 | Olympus Medical Systems Corp | 外科手術装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US9445833B2 (en) | 2016-09-20 |
| EP3005965B1 (en) | 2018-11-21 |
| CN105338916B (zh) | 2017-10-13 |
| JPWO2014196640A1 (ja) | 2017-02-23 |
| WO2014196640A1 (ja) | 2014-12-11 |
| US20160058465A1 (en) | 2016-03-03 |
| EP3005965A4 (en) | 2017-01-25 |
| CN105338916A (zh) | 2016-02-17 |
| EP3005965A1 (en) | 2016-04-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5797355B2 (ja) | 超音波プローブ及び超音波処置装置 | |
| US9901754B2 (en) | Grasping treatment apparatus and grasping unit | |
| JP6454652B2 (ja) | 把持ユニット | |
| JP5989275B2 (ja) | 把持ユニット及びバイポーラ処置具 | |
| JP5974183B2 (ja) | 超音波プローブ及び超音波処置装置 | |
| JP6109433B2 (ja) | 振動伝達ユニット及び超音波処置具 | |
| US20150196782A1 (en) | Ultrasonic probe and ultrasonic treatment device | |
| JPWO2018011918A1 (ja) | 把持処置具 | |
| CN109937018B (zh) | 振动传递构件及超声波处置器具 | |
| CN107530101B (zh) | 医疗设备和超声波手术装置 | |
| US20170020777A1 (en) | Vibration generating unit, vibrating body unit and ultrasonic treatment instrument | |
| WO2016006463A1 (ja) | 超音波プローブ及び超音波処置具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150319 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20150319 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20150422 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20150525 |
|
| TRDD | Decision of grant or rejection written | ||
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20150710 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150721 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150818 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5797355 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |