JP5828040B2 - パターン位相差フィルタの検査装置及び検査方法 - Google Patents
パターン位相差フィルタの検査装置及び検査方法 Download PDFInfo
- Publication number
- JP5828040B2 JP5828040B2 JP2014521456A JP2014521456A JP5828040B2 JP 5828040 B2 JP5828040 B2 JP 5828040B2 JP 2014521456 A JP2014521456 A JP 2014521456A JP 2014521456 A JP2014521456 A JP 2014521456A JP 5828040 B2 JP5828040 B2 JP 5828040B2
- Authority
- JP
- Japan
- Prior art keywords
- phase difference
- region
- polarizing plate
- light
- pattern
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images
















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/14—Measuring arrangements characterised by the use of optical techniques for measuring distance or clearance between spaced objects or spaced apertures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/89—Investigating the presence of flaws or contamination in moving material, e.g. running paper or textiles
- G01N21/892—Investigating the presence of flaws or contamination in moving material, e.g. running paper or textiles characterised by the flaw, defect or object feature examined
- G01N21/896—Optical defects in or on transparent materials, e.g. distortion, surface flaws in conveyed flat sheet or rod
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/95—Investigating the presence of flaws or contamination characterised by the material or shape of the object to be examined
- G01N21/956—Inspecting patterns on the surface of objects
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/95—Investigating the presence of flaws or contamination characterised by the material or shape of the object to be examined
- G01N2021/9513—Liquid crystal panels
Landscapes
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Engineering & Computer Science (AREA)
- Textile Engineering (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
- Polarising Elements (AREA)
- Investigating Or Analysing Materials By Optical Means (AREA)
- Testing Of Optical Devices Or Fibers (AREA)
- Liquid Crystal (AREA)
Description
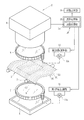
3 FPR
3A 支持体
3B 第1領域
3C 第2領域
4 光源部
5 パスローラ
6 エリアセンサカメラ
6C 絞り
6D エリアセンサ
7 第1偏光板
8 第2偏光板
9 光軸
11 第1回転制御部
12 第2回転制御部
14 画像処理部
15 演算処理部
16 情報処理部
18 画像表示部
20D 明領域
21B,21C 暗領域
20X,20Y,20Z 欠陥部
25 ハーフミラー
26 ミラー
27 λ/4波長板
RA 遅相軸
Claims (18)
- 透明な支持体に互いに異なる位相差特性を有するライン状の第1領域と第2領域とが交互にストライプ状に配列されたパターン位相差フィルタを保持する保持部と、
前記パターン位相差フィルタの一方の面に向けて光を照射する光源部と、
前記光源部から照射された光の一部をパターン位相差フィルタの一方の面に通過させる第1偏光板と、
前記第1偏光板を通過して前記パターン位相差フィルタの一方の面に入射し、前記パターン位相差フィルタの他方の面から出射した光のうち、前記第1領域及び第2領域との少なくともいずれかを通過した光を遮断して残りの光を通過させる第2偏光板と、
前記第2偏光板を通過した光で形成される検査画像を撮像するエリアセンサカメラと、
前記検査画像の明暗分布を評価して明暗の境界位置を算出し、前記第1領域又は第2領域のライン幅又はラインピッチ、もしくは第1領域と第2領域との境界部分に生じる境界線幅の少なくともいずれかを計測する情報処理部と、
を有することを特徴とするパターン位相差フィルタの検査装置。 - 前記光源部、前記第1偏光板、前記パターン位相差フィルタ、前記第2偏光板、前記エリアセンサカメラが、順に一直線上に配列された請求の範囲第1項記載のパターン位相差フィルタの検査装置。
- 前記光源部の照明光軸と前記エリアセンサカメラの撮像光軸との交差位置にハーフミラー、前記パターン位相差フィルタの前記他方の面に対面して全反射ミラーが設けられ、
前記ハーフミラーと前記光源部との間の撮像光軸上に第1偏光板、前記ハーフミラーと前記エリアセンサカメラとの間の照明光軸上に第2偏光板が設けられ、
前記第1偏光板を通過して前記ハーフミラーを透過又は反射した光を前記パターン位相差フィルタの一方の面に入射させるとともに、前記パターン位相差フィルタの他方の面から出射した光を前記全反射ミラーの反射で再度パターン位相差フィルタの他方の面から入射させ、パターン位相差フィルタの前記一方の面から出射した光を前記ハーフミラーで反射又は透過させて前記第2偏光板に入射させる請求の範囲第1項記載のパターン位相差フィルタの検査装置。 - 前記第1偏光板及び第2偏光板の各々の透過軸の光軸回りの向きを調整する回転制御部を有する請求の範囲第1項又は第2項いずれか1項記載のパターン位相差フィルタの検査装置。
- 前記情報処理部は、前記エリアセンサカメラの画像を監視して前記第1又は第2領域の少なくとも一方が消光状態となるように前記回転制御部を作動させる請求の範囲第4項記載のパターン位相差フィルタの検査装置。
- 前記第1、第2偏光板の少なくとも一方が、前記エリアセンサカメラの撮像画面内で、透過軸の方向が異なる少なくとも2つの領域を有し、前記2つの領域の一方は前記パターン位相差フィルタの第1領域と第2領域との双方が消光状態となる条件に設定され、前記2つの領域の他方は前記第1領域と第2領域との間に濃度差が生じる条件に設定され、
前記情報処理部は、前記2つの領域を通して得られた画像に基づいて前記第1領域と第2領域の判別を行うとともに、判別した前記第1領域と第2領域ごとのライン幅又はラインピッチ、もしくは第1領域と第2領域との境界部分に生じる境界線幅の少なくともいずれかを計測する請求の範囲第1項ないし第3項いずれか1項記載のパターン位相差フィルタの検査装置。 - 前記第1偏光板と前記パターン位相差フィルタとの間、又は前記パターン位相差フィルタと第2偏光板との間の少なくとも一方に、前記2つの領域のいずれかに重なるように位相差板を配置した請求の範囲第6項記載のパターン位相差フィルタの検査装置。
- 前記位相差板は、λ/4波長板もしくはλ/2波長板である請求の範囲第7項記載のパターン位相差フィルタの検査装置。
- 前記エリアセンサカメラは、テレセントリック系光学系を通して撮像する請求の範囲第1項記載のパターン位相差フィルタの検査装置。
- 前記情報処理部は、
前記検査画像を2値化処理した後の明部と暗部との境界を表す折れ線を直線に近似する近似直線化処理と、
前記近似直線化処理後の画像を解析し、撮像画面内の複数の明部又は暗部に含まれる画素数を前記ストライプ状パターン延長方向と平行な方向で個別に集計した画素数集計ヒストグラムを作成する画素数集計処理と、
前記画素数集計ヒストグラム中の画素数集計グラフの幅に基づいて明部又は暗部の幅を計測する計数処理と、
を順次に実行する請求の範囲第1項ないし第3項いずれか1項記載のパターン位相差フィルタの検査装置。 - 前記情報処理部は、
前記近似直線化処理が行われた後に、近似された直線が囲む明部又は暗部に含まれる画素数が最大となる代表ブロックを選定し、前記代表ブロックの境界となった直線を代表近似直線に決定した後、前記代表近似直線を前記第1領域と第2領域とのストライプパターン延長方向に一致させるために前記代表ブロックとともに近似直線化処理後の画像を回転させる画像回転処理を行ってから前記画素数集計処理を実行する請求の範囲第10項記載のパターン位相差フィルタの検査装置。 - 前記情報処理部は、前記計数処理に際して、濃度の変化が明から暗、又は暗から明となる2種類の境界線を識別して計数する請求の範囲第10項又は第11項いずれか1項記載のパターン位相差フィルタの検査装置。
- 前記情報処理部は、前記計数処理で得られた境界線幅の計数値のうち、予め設定された範囲内の計数値を用いて前記パターン位相差フィルタの評価を行う請求の範囲第10項記載のパターン位相差フィルタの検査装置。
- 透明な支持体に互いに異なる位相差特性を有するライン状の第1領域と第2領域とが交互にストライプ状に配列されたパターン位相差フィルタの一方の面から第1偏光板を通過した光を照射し、前記パターン位相差フィルタの他方の面から出射した光を前記第1偏光板とは透過軸が異なる向きに設定された第2偏光板を通してエリアセンサカメラで撮像する検査画像の撮像ステップと、
前記検査画像の明暗分布を評価して明暗の境界位置を算出し、前記第1領域又は第2領域のライン幅又はラインピッチ、もしくは第1領域と第2領域との境界部分に生じる境界線幅の少なくともいずれかを計測する情報処理ステップと、
を有するパターン位相差フィルタの検査方法。 - 前記撮像ステップは、前記第1偏光板と第2偏光板とを光軸回りに回転させ、前記第1領域又は第2領域との少なくともいずれか一方を消光状態で撮像するために、それぞれの透過軸の向きを調整するステップを含む請求の範囲第14項記載のパターン位相差フィルタの検査方法。
- 前記情報処理ステップは、
前記検査画像を2値化処理した後の明部と暗部との境界を表す折れ線を直線に近似する近似直線化処理と、
前記近似直線化処理後の画像を解析し、撮像画面内の複数の明部又は暗部に含まれる画素数を前記ストライプ状パターン延長方向と平行な方向で個別に集計した画素数集計ヒストグラムを作成する画素数集計処理と、
前記画素数集計ヒストグラム中の画素数集計グラフの幅に基づいて明部又は暗部の幅を計測する計数処理と、
を含む請求の範囲第15項記載のパターン位相差フィルタの検査方法。 - 前記情報処理ステップは、
前記近似直線化処理が行われた後に、近似された直線が囲む明部又は暗部に含まれる画素数が最大となる代表ブロックを選定し、前記代表ブロックの境界となった直線を代表近似直線に決定した後、前記代表近似直線を前記第1領域と第2領域とのストライプパターン延長方向に一致させるために前記代表ブロックとともに近似直線化処理後の画像を回転させる画像回転処理を行ってから前記画素数集計処理を実行する請求の範囲第16項記載のパターン位相差フィルタの検査方法。 - 前記情報処理ステップは、前記計数処理に際して、濃度の変化が明から暗、又は暗から明となる2種類の境界線を識別して計数する請求の範囲第17項記載のパターン位相差フィルタの検査方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014521456A JP5828040B2 (ja) | 2012-06-18 | 2013-06-17 | パターン位相差フィルタの検査装置及び検査方法 |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012136850 | 2012-06-18 | ||
| JP2012136850 | 2012-06-18 | ||
| JP2014521456A JP5828040B2 (ja) | 2012-06-18 | 2013-06-17 | パターン位相差フィルタの検査装置及び検査方法 |
| PCT/JP2013/066594 WO2013191133A1 (ja) | 2012-06-18 | 2013-06-17 | パターン位相差フィルタの検査装置及び検査方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP5828040B2 true JP5828040B2 (ja) | 2015-12-02 |
| JPWO2013191133A1 JPWO2013191133A1 (ja) | 2016-05-26 |
Family
ID=49768729
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014521456A Expired - Fee Related JP5828040B2 (ja) | 2012-06-18 | 2013-06-17 | パターン位相差フィルタの検査装置及び検査方法 |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP5828040B2 (ja) |
| KR (1) | KR101622865B1 (ja) |
| TW (1) | TW201400800A (ja) |
| WO (1) | WO2013191133A1 (ja) |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USRE46672E1 (en) | 2006-07-13 | 2018-01-16 | Velodyne Lidar, Inc. | High definition LiDAR system |
| DE102015114018A1 (de) * | 2015-08-24 | 2017-03-02 | Jenoptik Industrial Metrology Germany Gmbh | Ventilspaltmessvorrichtung |
| US10627490B2 (en) | 2016-01-31 | 2020-04-21 | Velodyne Lidar, Inc. | Multiple pulse, LIDAR based 3-D imaging |
| CN109154661A (zh) | 2016-03-19 | 2019-01-04 | 威力登激光雷达有限公司 | 用于基于lidar的3-d成像的集成照射和检测 |
| US10393877B2 (en) | 2016-06-01 | 2019-08-27 | Velodyne Lidar, Inc. | Multiple pixel scanning LIDAR |
| WO2018183843A1 (en) | 2017-03-31 | 2018-10-04 | Velodyne Lidar, Inc. | Integrated lidar illumination power control |
| CN110809704B (zh) | 2017-05-08 | 2022-11-01 | 威力登激光雷达美国有限公司 | Lidar数据获取与控制 |
| CN107426935B (zh) * | 2017-09-11 | 2023-05-16 | 北京小米移动软件有限公司 | 边框结构件、电子设备壳体及电子设备 |
| TWI782086B (zh) * | 2017-09-13 | 2022-11-01 | 日商住友化學股份有限公司 | 缺陷檢查裝置、缺陷檢查方法、圓偏光板或橢圓偏光板之製造方法及相位差板之製造方法 |
| US11082010B2 (en) | 2018-11-06 | 2021-08-03 | Velodyne Lidar Usa, Inc. | Systems and methods for TIA base current detection and compensation |
| KR102147128B1 (ko) * | 2018-11-26 | 2020-08-25 | 주식회사 탑 엔지니어링 | 기판 검사 장치 |
| KR102147130B1 (ko) * | 2018-11-26 | 2020-08-25 | 주식회사 탑 엔지니어링 | 기판 검사 장치 |
| US11885958B2 (en) | 2019-01-07 | 2024-01-30 | Velodyne Lidar Usa, Inc. | Systems and methods for a dual axis resonant scanning mirror |
| DE102019109791A1 (de) * | 2019-04-12 | 2020-10-15 | Stephan Krebs | Vorrichtung zur Druckbildkontrolle für eine Druck- oder Konfektioniermaschine und Verfahren zur Validierung von Inspektionsalgorithmen einer Vorrichtung zur Druckbildkontrolle |
| KR102486442B1 (ko) * | 2019-06-07 | 2023-01-09 | 주식회사 엘지화학 | 편광판의 액정얼룩 검사장치 및 편광판의 액정얼룩 검사방법 |
| TWI712788B (zh) * | 2019-11-14 | 2020-12-11 | 勝麗國際股份有限公司 | 感測器封裝結構的缺陷檢測方法 |
| CN111854605A (zh) * | 2020-07-28 | 2020-10-30 | 陈圆圆 | 一种基于云计算的测试仪器 |
| JP7413234B2 (ja) * | 2020-11-06 | 2024-01-15 | 株式会社東芝 | 光学撮像装置、光学検査装置、および、光学検査方法 |
| CN113916907B (zh) * | 2021-12-13 | 2022-02-18 | 成都工业学院 | 一种光栅立体画印刷质量检测方法 |
| CN116818786B (zh) * | 2023-06-14 | 2024-06-21 | 成都瑞波科材料科技有限公司 | 用于光学膜的异物检测装置、方法及光学膜涂布装置 |
| JP2025094777A (ja) * | 2023-12-13 | 2025-06-25 | 株式会社エスケーエレクトロニクス | 透明体の欠陥検査方法及び欠陥検査装置 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06148095A (ja) * | 1992-10-30 | 1994-05-27 | Nippon Steel Chem Co Ltd | フィルム・シート類の透明欠陥検出方法 |
| JPH06235624A (ja) * | 1992-12-15 | 1994-08-23 | Hitachi Ltd | 透明シートの検査方法とその装置 |
| JP4576500B2 (ja) | 2001-03-28 | 2010-11-10 | レーザーテック株式会社 | 位相シフトマスクの欠陥検査装置 |
| JP2005337857A (ja) * | 2004-05-26 | 2005-12-08 | Toray Ind Inc | 表面凹凸の検査方法および検査装置 |
| JP4628824B2 (ja) * | 2005-03-10 | 2011-02-09 | 富士フイルム株式会社 | フイルムの欠陥検査装置及びフイルムの製造方法 |
| JP2008175609A (ja) * | 2007-01-17 | 2008-07-31 | Sekisui Chem Co Ltd | 光学フィルムの検査方法及び光学フィルム |
| JP2008267991A (ja) * | 2007-04-20 | 2008-11-06 | Dainippon Printing Co Ltd | 位相差フィルム検査装置、位相差フィルムの検査方法およびこれを用いた位相差フィルムの製造方法 |
| JP2008298566A (ja) * | 2007-05-31 | 2008-12-11 | Fujifilm Corp | フィルムの欠陥検査装置及び方法 |
| JP5115928B2 (ja) * | 2008-05-20 | 2013-01-09 | 王子計測機器株式会社 | 位相差分布測定装置 |
-
2013
- 2013-06-14 TW TW102121006A patent/TW201400800A/zh unknown
- 2013-06-17 JP JP2014521456A patent/JP5828040B2/ja not_active Expired - Fee Related
- 2013-06-17 KR KR1020147030379A patent/KR101622865B1/ko not_active Expired - Fee Related
- 2013-06-17 WO PCT/JP2013/066594 patent/WO2013191133A1/ja not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| WO2013191133A1 (ja) | 2013-12-27 |
| JPWO2013191133A1 (ja) | 2016-05-26 |
| KR101622865B1 (ko) | 2016-05-19 |
| KR20140146636A (ko) | 2014-12-26 |
| TW201400800A (zh) | 2014-01-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5828040B2 (ja) | パターン位相差フィルタの検査装置及び検査方法 | |
| CN107643612B (zh) | 检查装置以及检查方法 | |
| KR101203210B1 (ko) | 결함 검사장치 | |
| TWI629665B (zh) | 缺陷檢查方法及缺陷檢測系統 | |
| JP2013050393A (ja) | パターン化位相差フィルムの欠陥検出装置及び方法、並びに製造方法 | |
| CN115398213A (zh) | 用于光学检测表面的方法和检测装置 | |
| TW201443424A (zh) | 透明板狀體表面檢查用攝像系統 | |
| JP2019082452A (ja) | 画像生成方法、画像生成装置、及びそれらを用いた欠陥判定方法 | |
| KR101211438B1 (ko) | 결함 검사장치 | |
| KR20000017647A (ko) | 투명판의 표면 요철 검사 방법 및 장치 | |
| JP5557586B2 (ja) | 表面性状測定装置および表面性状測定方法 | |
| JP2013205091A (ja) | フィルム検査システム、フィルム検査方法 | |
| TW201426131A (zh) | 聯機測量裝置 | |
| JP4108829B2 (ja) | 厚み欠陥検査装置及びその検査方法 | |
| JP2005351825A (ja) | 欠陥検査装置 | |
| JP2012058029A (ja) | 周期性パターン検査装置 | |
| CN103196837B (zh) | 一种图像式红外反射率和透射率定量检测的装置及方法 | |
| JP2010096596A (ja) | 評価装置 | |
| JP2020094877A (ja) | 光学評価装置、光学評価方法、被検物搬送方法 | |
| JP5231779B2 (ja) | 外観検査装置 | |
| JP5648937B2 (ja) | 評価装置 | |
| JP2020091132A (ja) | 透光性部材の表面欠陥検査装置 | |
| JP2013210245A (ja) | フィルム検査システム、フィルム検査方法 | |
| JP2012068211A (ja) | シート部材の歪み検査装置及びシート部材の歪み検査方法 | |
| JP5768349B2 (ja) | スリット光輝度分布設計方法および光切断凹凸疵検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20151007 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151019 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5828040 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |