JP5872894B2 - ロボット動作教示支援装置及び方法 - Google Patents
ロボット動作教示支援装置及び方法 Download PDFInfo
- Publication number
- JP5872894B2 JP5872894B2 JP2011288486A JP2011288486A JP5872894B2 JP 5872894 B2 JP5872894 B2 JP 5872894B2 JP 2011288486 A JP2011288486 A JP 2011288486A JP 2011288486 A JP2011288486 A JP 2011288486A JP 5872894 B2 JP5872894 B2 JP 5872894B2
- Authority
- JP
- Japan
- Prior art keywords
- robot
- teaching
- interference
- motion
- position information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Landscapes
- Numerical Control (AREA)
- Manipulator (AREA)
Description
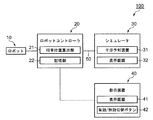
即ち、本発明の第1態様におけるロボット動作教示支援装置は、動作プログラムに従いロボットの動作を制御するロボットコントローラに接続されロボットの動作姿勢を画面表示するシミュレータを備え、上記動作プログラムの作成を支援するロボット動作教示支援装置であって、
上記ロボットコントローラは、ロボットの動作姿勢の将来位置を算出する将来位置算出部を有し、
上記シミュレータは、上記将来位置算出部から供給される将来位置でのロボットの動作姿勢を画面表示し、かつ将来位置での当該ロボットの干渉の有無を判断する干渉予知装置を有する、ことを特徴とする。
上記干渉予知装置は、ロボットにおける実際の作業環境と同じ位置関係でロボット及びロボット周辺装置を配置した3次元仮想空間を生成する仮想空間生成部を有し、この3次元仮想空間において上記将来位置でのロボットの動作姿勢を表示し、
上記干渉予知装置は、さらに、教示装置から入力される動作位置情報に伴い変化するロボットの将来位置における干渉の有無を上記3次元仮想空間において判断し、かつ上記教示装置に対して干渉箇所を表示させる教示装置用干渉表示部を有することもできる。
上記ロボットコントローラは、ロボットの動作姿勢の将来位置を算出し、
上記シミュレータは、ロボットにおける実際の作業環境と同じ位置関係でロボット及びロボット周辺装置を配置した3次元仮想空間を生成し、この3次元仮想空間において上記将来位置でのロボットの動作姿勢を表示し、さらに、上記教示装置から入力される動作位置情報に伴い変化するロボットの将来位置での干渉の有無を上記3次元仮想空間において判断し、
干渉有のときには、上記シミュレータは、さらに、ロボットコントローラに対してロボットの動作停止を指示し、かつ干渉を回避可能な動作位置情報を入力するために上記教示装置へ干渉箇所を表示させることを特徴とする。
よって、ロボットコントローラ20における将来位置算出部21は、教示装置40からの入力値に応じて時々刻々変化する将来の指令値を算出する。
これに対して本実施形態に含まれるシミュレータ30は、このような従来の使用方法のみならず、上述のように通信ネットワーク50にてロボットコントローラ20と接続され、完成状態に近い状態における生産ラインの状況を表示画面32上でシミュレーションする装置であり、干渉予知装置31を有している。尚、シミュレータ30とロボットコントローラ20とは、図示のように別物で構成されてもよいし、ロボットコントローラ20の機能を実行するソフトウェア(プログラム)と、シミュレータ30の機能を実行するソフトウェア(プログラム)とが一つのコンピュータに格納された構成を採ることもできる。
よって、シミュレータ30の干渉予知装置31にて上記将来位置での干渉有が判断されたときには、干渉予知装置31は、ロボットコントローラ20へロボット10の動作停止を指示する。そして教示作業者は、干渉回避のための修正位置情報を教示装置40から入力することができる。
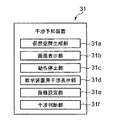
尚、仮想空間生成部31a等の各機能動作部分の詳しい機能については、下記の当該ロボット動作教示支援装置100の動作説明部分にて説明を行う。
即ち、ロボット10における、教示しようとする教示位置について、教示作業者は、当該動作に関するロボット10の位置情報を教示装置40から入力する(ステップS1)。次に、ロボットコントローラ20の将来位置算出部21は、入力された位置情報に応じて将来位置(将来の指令値)を算出し(ステップS2)、算出した将来の指令値をシミュレータ30の干渉予知装置31へ送信する。そして干渉予知装置31は、ロボット10の将来位置における、ロボット間や周辺装置との干渉の有無を判断する(ステップS3)。ステップS3にて、将来位置において干渉有りと判断されたときには、干渉予知装置31からロボットコントローラ20へ停止信号が送信され、ロボットコントローラ20は、ロボット10の動作を停止させる(ステップS4)。よって、ロボット10における実際の干渉は、未然に防止される。また、予知された将来位置での干渉を回避するため、再度ステップ1へ戻り、教示作業者は、教示装置40から修正位置情報を入力することができ、シミュレータ30は、修正位置情報に応じて再び将来位置での干渉の有無を判断する。
尚、以下で説明するが、図4ではステップS0にて3次元空間を生成する旨を示しているが、該動作は、必須の動作ではない。
ロボット10に対する教示作業を行っている教示作業者において、上述した干渉の有無が容易に認識できるように、シミュレータ30の干渉予知装置31は、まず、実際の作業環境と同じ位置関係となるようにロボット10、上記周辺装置等を配置設定した3次元仮想空間を構築する(図4、ステップS0)。この動作は、入力された実際の作業環境の情報を用いて、図2に示す干渉予知装置31の仮想空間生成部31aで実行され、構築される3次元仮想空間は、実際のロボット10及び周辺装置等に則したモデルとなる。構築された3次元仮想空間モデルは、干渉予知装置31の画面表示部31b(図2)によって、シミュレータ30の表示画面32へ表示される。表示された3次元仮想空間モデルの一例を図5に示す。
一方、干渉チェックの結果、干渉が発生する場合には、ロボット10がこのまま動作すると干渉が発生することとなるため、干渉予知装置31は、通信ネットワーク50を介してロボットコントローラ20へ停止信号を送信する。この動作は、図2に示す干渉予知装置31の動作停止部31cで実行される。停止信号を受信したロボットコントローラ20は、対応するロボット10の動作を停止させる(図4、ステップS4)。これにより、干渉を未然に防止することができる。
シミュレータ30では、上述したように仮想的な3次元空間を構築して干渉の有無をチェックしている。よって、この3次元仮想空間における機器配置と、実際の機器配置とは数mmオーダー以上の位置誤差が発生することは避けることができない。このような位置誤差に起因する干渉の誤検出に対処するために、本実施形態のロボット動作教示支援装置100では以下の2点を構成している。
このようなデッドロック状態からの離脱を容易に行うために、教示装置40は、干渉チェックの有効あるいは無効を容易に切り替えることのできる有効/無効切替ボタン(干渉チェックオーバーライドボタン)42(図1)を有する。例えば、教示作業者がこのボタンを押しながら、かつロボット10の軸操作キーを押下する等してロボット10の動作位置及び姿勢を指示したときには、教示装置40は、干渉予知装置31に対して干渉チェックを無効の状態とすることができる。尚、本機能は、上述の、位置誤差による誤検知への対策としても使用できる。
また、物体を移動させるためのアクチュエータに内蔵された、エンコーダ等のセンサからの情報に基づき、物体の位置を求めることができる場合や、レーザ距離センサのような外部のセンサにて物体の位置を計測してもよい。計測したデータを干渉予知装置31に入力することで、3次元仮想空間内における物体の位置を決定してもよい。
30…シミュレータ、31…干渉予知装置、31a…仮想空間生成部、
31b…画面表示部、31c…動作停止部、31d…教示装置用干渉表示部、
31e…距離設定部、40…教示装置、42…有効/無効切替ボタン、
100…ロボット動作教示支援装置。
Claims (7)
- 動作プログラムに従いロボット(10)の動作を制御するロボットコントローラ(20)に接続されロボットの動作姿勢を画面表示するシミュレータ(30)を備え、上記動作プログラムの作成を支援するロボット動作教示支援装置であって、
上記ロボットコントローラは、ロボットの動作姿勢の将来位置を算出する将来位置算出部(21)を有し、
上記シミュレータは、上記将来位置算出部から供給される将来位置でのロボットの動作姿勢を画面表示し、かつ将来位置での当該ロボットの干渉の有無を判断する干渉予知装置(31)を有し、
上記ロボットコントローラに接続されロボットの動作位置情報を入力する教示装置(40)をさらに備え、ここで教示装置は、上記動作プログラムにおいて作成されるロボットの動作姿勢の第1動作位置情報及び第2動作位置情報のうち第1動作位置情報が入力されるものであり、
上記将来位置算出部は、上記教示装置から入力された上記第1動作位置情報に応じて、ロボットの動作姿勢の将来位置に相当する上記第2動作位置情報を算出する、
ことを特徴とするロボット動作教示支援装置。 - 上記干渉予知装置は、干渉有の判断に従いロボットコントローラへロボットの動作停止を指示する動作停止部(31c)を有する、請求項1記載のロボット動作教示支援装置。
- 上記干渉予知装置は、ロボットにおける実際の作業環境と同じ位置関係でロボット及びロボット周辺装置を配置した3次元仮想空間を生成する仮想空間生成部(31a)を有し、この3次元仮想空間において上記将来位置でのロボットの動作姿勢を表示し、
上記干渉予知装置は、さらに、教示装置から入力される動作位置情報に伴い変化するロボットの将来位置における干渉の有無を上記3次元仮想空間において判断し、かつ上記教示装置に対して干渉箇所を表示させる教示装置用干渉表示部(31d)を有する、請求項2記載のロボット動作教示支援装置。 - 上記教示装置は、上記干渉予知装置における干渉有無の判断を有効又は無効にする有効/無効切替ボタン(42)を有する、請求項3に記載のロボット動作教示支援装置。
- 上記将来位置算出部は、数百m秒から数秒先の将来位置を算出する、請求項1から4のいずれかに記載のロボット動作教示支援装置。
- 上記干渉予知装置は、干渉有と判断するための、対象部材間の距離を可変に設定する距離設定部(31e)を有する、請求項1から5のいずれかに記載のロボット動作教示支援装置。
- 動作プログラムに従いロボット(10)の動作を制御するロボットコントローラ(20)に接続されてロボットの動作姿勢を画面表示するシミュレータ(30)と、上記ロボットコントローラに接続されロボットの動作位置情報を入力する教示装置(40)とを備えたロボット動作教示支援装置にて実行される、ロボットの動作プログラムの作成を支援するロボット動作教示支援方法であって、
上記教示装置を介して、上記動作プログラムにおいて作成されるロボットの動作姿勢の第1動作位置情報及び第2動作位置情報のうち第1動作位置情報が入力されたとき、
上記ロボットコントローラは、入力された上記第1動作位置情報に応じて、ロボットの動作姿勢の将来位置に相当する上記第2動作位置情報を算出し、
上記シミュレータは、ロボットにおける実際の作業環境と同じ位置関係でロボット及びロボット周辺装置を配置した3次元仮想空間を生成し、この3次元仮想空間において上記将来位置でのロボットの動作姿勢を表示し、さらに、上記教示装置から入力される動作位置情報に伴い変化するロボットの将来位置での干渉の有無を上記3次元仮想空間において判断し、
干渉有のときには、上記シミュレータは、さらに、ロボットコントローラに対してロボットの動作停止を指示し、かつ干渉を回避可能な動作位置情報を入力するために上記教示装置へ干渉箇所を表示させる、
ことを特徴とするロボット動作教示支援方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011288486A JP5872894B2 (ja) | 2011-12-28 | 2011-12-28 | ロボット動作教示支援装置及び方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011288486A JP5872894B2 (ja) | 2011-12-28 | 2011-12-28 | ロボット動作教示支援装置及び方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013136123A JP2013136123A (ja) | 2013-07-11 |
| JP5872894B2 true JP5872894B2 (ja) | 2016-03-01 |
Family
ID=48912319
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011288486A Active JP5872894B2 (ja) | 2011-12-28 | 2011-12-28 | ロボット動作教示支援装置及び方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5872894B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102267943B1 (ko) * | 2019-12-17 | 2021-06-21 | 경남대학교 산학협력단 | 6축 다관절로봇의 모니터링 장치 |
| KR20230068530A (ko) * | 2021-11-11 | 2023-05-18 | 주식회사 소이넷 | 협동 로봇 지능제어를 위한 모니터링 제어 시스템 |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5927310B1 (ja) * | 2015-01-14 | 2016-06-01 | ファナック株式会社 | ロボットシステムのシミュレーション装置 |
| JP6328599B2 (ja) | 2015-11-20 | 2018-05-23 | ファナック株式会社 | ロボットの動作可能範囲を算出するロボットの手動送り装置 |
| JP6420296B2 (ja) | 2016-12-01 | 2018-11-07 | ファナック株式会社 | ロボットの干渉領域を自動で設定するロボット制御装置 |
| US10766140B2 (en) * | 2017-04-13 | 2020-09-08 | Battelle Memorial Institute | Teach mode collision avoidance system and method for industrial robotic manipulators |
| JP6909632B2 (ja) * | 2017-05-16 | 2021-07-28 | タクボエンジニアリング株式会社 | 塗装ロボットのティーチング方法 |
| JP6592053B2 (ja) * | 2017-10-11 | 2019-10-16 | ファナック株式会社 | 作業ツールの移動方向を監視する制御装置 |
| JP7155664B2 (ja) * | 2017-10-31 | 2022-10-19 | セイコーエプソン株式会社 | シミュレーション装置、制御装置およびロボット |
| WO2019092792A1 (ja) * | 2017-11-07 | 2019-05-16 | 三菱電機株式会社 | 表示制御装置、表示制御方法および表示制御プログラム |
| JP7146402B2 (ja) | 2018-01-18 | 2022-10-04 | キヤノン株式会社 | 情報処理装置、および情報処理方法 |
| JP7118725B2 (ja) * | 2018-04-27 | 2022-08-16 | 川崎重工業株式会社 | ロボットの教示方法及びロボットの教示システム |
| JP2020082307A (ja) * | 2018-11-29 | 2020-06-04 | トヨタ自動車株式会社 | ロボットのリスクアセスメント方法 |
| JP7396872B2 (ja) | 2019-11-22 | 2023-12-12 | ファナック株式会社 | 拡張現実を用いたシミュレーション装置及びロボットシステム |
| CN111862297A (zh) * | 2020-06-02 | 2020-10-30 | 天津大学 | 基于Coin3D的协作机器人可视化仿真示教方法 |
| WO2024111687A1 (ko) * | 2022-11-22 | 2024-05-30 | 엘지전자 주식회사 | 로봇 가상 검증 방법 및 이를 위한 시스템 |
| WO2025215821A1 (ja) * | 2024-04-12 | 2025-10-16 | ファナック株式会社 | ロボットシミュレーション装置、及びロボットシミュレーション方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07299792A (ja) * | 1994-04-28 | 1995-11-14 | Matsushita Electric Ind Co Ltd | 複腕ロボットシステムとその制御方法 |
| JP3202731B2 (ja) * | 1999-06-21 | 2001-08-27 | 川崎重工業株式会社 | 搬送装置 |
| JP2003165079A (ja) * | 2001-11-28 | 2003-06-10 | Nachi Fujikoshi Corp | 産業用ロボット |
| JP3907649B2 (ja) * | 2004-09-02 | 2007-04-18 | ファナック株式会社 | ロボット間の干渉防止制御装置 |
| JP4836458B2 (ja) * | 2005-01-07 | 2011-12-14 | 株式会社神戸製鋼所 | 動作プログラムの作成方法 |
| KR100738052B1 (ko) * | 2006-12-26 | 2007-07-12 | 주식회사 이디 | 지능형 로봇 제어 시뮬레이션 시스템 |
| JP5025598B2 (ja) * | 2008-08-29 | 2012-09-12 | 三菱電機株式会社 | 干渉チェック制御装置および干渉チェック制御方法 |
| JP2010172990A (ja) * | 2009-01-28 | 2010-08-12 | Seiko Epson Corp | ロボット制御装置、ロボットの制御方法 |
| JP2010240782A (ja) * | 2009-04-07 | 2010-10-28 | Seiko Epson Corp | ロボット制御システム、制御装置および制御方法 |
-
2011
- 2011-12-28 JP JP2011288486A patent/JP5872894B2/ja active Active
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102267943B1 (ko) * | 2019-12-17 | 2021-06-21 | 경남대학교 산학협력단 | 6축 다관절로봇의 모니터링 장치 |
| KR20230068530A (ko) * | 2021-11-11 | 2023-05-18 | 주식회사 소이넷 | 협동 로봇 지능제어를 위한 모니터링 제어 시스템 |
| KR102691989B1 (ko) * | 2021-11-11 | 2024-08-05 | 주식회사 소이넷 | 협동 로봇 지능제어를 위한 모니터링 제어 시스템 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013136123A (ja) | 2013-07-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5872894B2 (ja) | ロボット動作教示支援装置及び方法 | |
| US11220002B2 (en) | Robot simulation device | |
| US10737396B2 (en) | Method and apparatus for robot path teaching | |
| US20140195054A1 (en) | Robot system, robot control device and method for controlling robot | |
| Bolmsjö et al. | Robotic arc welding–trends and developments for higher autonomy | |
| JP6450737B2 (ja) | ロボットシステム | |
| JP5458769B2 (ja) | ロボットの制御装置 | |
| JP2015174185A (ja) | ロボットのシミュレーション装置及び方法、制御装置、及びロボットシステム | |
| US12115672B2 (en) | Robot planning | |
| CN115476365B (zh) | 机器人示教装置及利用其的机器人示教方法 | |
| CN115502979A (zh) | 一种机械臂力矩主动柔顺精确控制方法及系统 | |
| US10406688B2 (en) | Offline programming apparatus and method having workpiece position detection program generation function using contact sensor | |
| CN118269089A (zh) | 用于机械手的运动模拟的方法 | |
| JP2018062026A (ja) | ロボットの速度や加速度を制限する機能を備えたロボット制御装置 | |
| JP2014217901A (ja) | ロボットシステム | |
| JP2021175595A (ja) | シミュレータ、ロボット教示装置、ロボットシステム、シミュレーション方法、プログラム及び記録媒体 | |
| JP2016159406A (ja) | ロボット制御装置、ロボット制御方法及びロボットシステム | |
| JP7448651B2 (ja) | オフライン教示装置および動作プログラム生成方法 | |
| US11787054B2 (en) | Robot planning | |
| US20180088569A1 (en) | Off-line-programming jog assist device, jog assist method, and recording medium storing jog assist program | |
| JP7568854B2 (ja) | 制御装置、干渉チェック装置、及び制御システム | |
| JP7761657B2 (ja) | シミュレーション装置 | |
| JP2010167507A (ja) | ロボットシステム及びその制御方法 | |
| JP7753049B2 (ja) | ロボットデータ処理サーバ及び軌跡データ算出方法 | |
| US20260077492A1 (en) | Control system with multiple simulators |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141009 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150813 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150825 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151020 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160105 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160114 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5872894 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |