JP5922075B2 - 把持器、持針器及びアタッチメント - Google Patents
把持器、持針器及びアタッチメント Download PDFInfo
- Publication number
- JP5922075B2 JP5922075B2 JP2013200150A JP2013200150A JP5922075B2 JP 5922075 B2 JP5922075 B2 JP 5922075B2 JP 2013200150 A JP2013200150 A JP 2013200150A JP 2013200150 A JP2013200150 A JP 2013200150A JP 5922075 B2 JP5922075 B2 JP 5922075B2
- Authority
- JP
- Japan
- Prior art keywords
- arm
- holding
- rotating
- driving
- rotating member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000001174 ascending effect Effects 0.000 claims description 2
- 230000036544 posture Effects 0.000 description 17
- 210000000078 claw Anatomy 0.000 description 13
- 230000005540 biological transmission Effects 0.000 description 6
- 210000004204 blood vessel Anatomy 0.000 description 6
- 238000000034 method Methods 0.000 description 5
- 238000002324 minimally invasive surgery Methods 0.000 description 4
- 230000001681 protective effect Effects 0.000 description 4
- 210000000683 abdominal cavity Anatomy 0.000 description 3
- 230000008878 coupling Effects 0.000 description 3
- 238000010168 coupling process Methods 0.000 description 3
- 238000005859 coupling reaction Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 229910001285 shape-memory alloy Inorganic materials 0.000 description 3
- 230000000007 visual effect Effects 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000005553 drilling Methods 0.000 description 2
- 238000012084 abdominal surgery Methods 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 238000002674 endoscopic surgery Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000001356 surgical procedure Methods 0.000 description 1
Images










Landscapes
- Surgical Instruments (AREA)
Description
このような持針器を用いて縫合手技を行なう場合、例えば、縫合針を持針器の長手方向と直交する方向(以下、横方向という場合がある)に把持して、横方向に運針することが一般的である。
請求項1に記載の発明は、対象物を把持する把持器であって、前記対象物を挟持する第1挟持アーム部を有し支持軸周りに回動可能とされる第1アーム回動部材と、前記第1挟持アーム部と一対とされ前記対象物を前記第1挟持アーム部と協働して挟持する第2挟持アーム部を有し支持軸周りに回動可能とされる第2アーム回動部材と、前記第1アーム回動部材に連結されて前記第1アーム回動部材を回動させる第1アーム駆動部材と、前記第2アーム回動部材に連結されて前記第2アーム回動部材を回動させる第2アーム駆動部材と、前記第1アーム駆動部材及び前記第2アーム駆動部材を介して前記第1アーム回動部材と前記第2アーム回動部材を回動することにより、前記第1挟持アーム部及び前記第2挟持アーム部を開閉させる第1駆動部と、前記支持軸の軸線と平行に形成された回動軸周りに、前記一対の挟持アーム部を回動させる第2駆動部とを備え、前記第1アーム駆動部材は、前記第1アーム回動部材に回動トルクを生じさせる第1連結部と前記第1駆動部とを連結し、前記第2アーム駆動部材は、前記第2アーム回動部材に回動トルクを生じさせる第2連結部と前記第1駆動部とを連結し、前記第1駆動部は、前記第1アーム駆動部材及び前記第2アーム駆動部材を、前記一対の挟持アーム部に対して同方向に進退させることによって、前記第1挟持アーム部と前記第2挟持アーム部とを開閉するように構成され、前記第2駆動部は、前記第1アーム駆動部材及び前記第2アーム駆動部材を互いに反対向きに進退することにより、前記一対の挟持アーム部を前記回動軸の軸線周りに回動させるように構成されていることを特徴とする。
そして、第2駆動部を作動することにより、支持軸の軸線と平行に形成された回動軸周りに一対の挟持アーム部を回動させるので、第1挟持アーム部及び第2挟持アーム部によって対象物を挟持する際の挟持力が、一対の挟持アーム部が回動するのを阻害するようなスラスト力等として、一対の挟持アーム部と回動軸との間に作用することが抑制される。その結果、対象物を安定的かつ効率的に垂直接線方向に取廻し、又は安定的かつ効率的に運針することができる。
この明細書において、対象物とは、生体(一部を含む)や組織、穿孔器具、切開器具、縫合針等を含むものとする。
本発明に係る把持器によれば、第1アーム駆動部材は、第1アーム回動部材に回動トルクを生じさせる第1連結部と第1駆動部とを連結し、第2アーム駆動部材は、第2アーム回動部材に回動トルクを生じさせる第2連結部と第1駆動部とを連結し、第1駆動部は、第1アーム駆動部材及び第2アーム駆動部材を、一対の挟持アーム部に対して同方向に進退させることによって、第1挟持アーム部と第2挟持アーム部とを開閉するので、構造が簡単であり、第1挟持アーム部及び第2挟持アーム部を容易かつ安定して開閉させることが可能となる。
本発明に係る把持器によれば、一対の挟持アーム部は支持軸の軸線と平行に形成された回動軸周りに回動可能に構成されており、第2駆動部は、第1アーム駆動部材及び第2アーム駆動部材を互いに反対向きに進退させることにより、一対の挟持アーム部を回動軸周りに回動されるので、構造が簡単であり、一対の挟持アーム部を容易かつ安定して回動軸周りに回動させることができる。
なお、アタッチメントは、第1アーム回動部材及び第2アーム回動部材の他、回動軸や連結用部材を備えててもよく、連結用部材を備える場合には、連結用部材を介して第1アーム回動部材及び第2アーム駆動部材に連結してもよい。
また、本発明に係る持針器によれば、狭小空間において、安定的かつ効率的に運針することができる。
また、本発明に係るアタッチメントによれば、第1アーム回動部材及び第2アーム回動部材を、容易かつ効率的に交換することができるので、使い捨てとすることにより、手術における衛生状態を確保することができる。
なお、持針器に代えて、対象物として、生体(一部を含む)や組織、穿孔器具、切開器具等を把持する把持器として用いてもよい。
また、第1挟持アーム部12Aの先端部には、対象物を効率的に挟持するための第1挟持爪部14Aが形成されている。
また、第2挟持アーム部12Bの先端部には、対象物を効率的に挟持するための第2挟持爪部14Bが形成されている。
また、第1挟持アーム部12A及び第2挟持アーム部12Bは、対象物をしっかりと挟持することが可能なアーム長に形成されている。
また、第1挟持爪部14A及び第2挟持爪部14Bは、協働して作用する一対の挟持爪部14を構成している。
第1挟持アーム駆動部材201は、第1アーム回動部材111に連結されて、第1アーム回動部材111を回動軸15の周りに回動可能に構成されている。
また、第2挟持アーム駆動部材202は、第2アーム回動部材112に連結されて、第2アーム回動部材112を回動軸15の周りに回動可能に構成されている。
また、この実施形態において、第1挟持アーム部12A及び第2挟持アーム部12Bは、回動軸15の周りに、例えば、±60°(合計120°)の範囲で回動して姿勢を変えることができるようになっている。
また、ピストン部材32は、第2駆動部50を操作した場合であっても、第2駆動部50との相対的な位置関係、すなわち支持軸31に対する進退量が保持されるようになっている。
また、連結孔331Aは、支点301Aにおいて、第5駆動リンク251の連結孔251Bと回動可能に連結されている。
また、連結孔332Aは、支点302Aにおいて、第5駆動リンク252の連結孔252Bと回動可能に連結されている。
また、第3制御リンク38は、第2アーム382の先端側(第1アーム381から離れた側)に、第1アーム381とは反対側に向かって膨出する押圧部位調整部382Aが形成されている。
その結果、第1挟持アーム駆動部材201及び第2挟持アーム駆動部材202が、第1挟持アーム部12A及び第2挟持アーム部12Bを開閉動作させるようになっている。
ねじ孔プラグ39Cは、ねじ部39Bと対応するねじ孔が内周に形成されるとともに、外周に持針器本体61に取り付けるためのねじ部が形成されている。
また、トルクアーム部53には、連結孔53Aが形成されていて、連結孔53Aには連結部材55が連結されている。
ここで、図5(A)は一対の挟持アーム部が閉じて回動される状態を、図5(B)は一対の挟持アーム部が開いて回動される状態を示している。
操作部561は、環状に形成されて人差指をひっかける環状部を有していて、この環状部から湾曲アーム部561Aが延在して形成されていて、湾曲アーム部561Aに中指をひっかけることにより、操作レバー56を容易に操作することができるようになっている。
レバー本体部562は、一端側に連結孔56Aが形成され、レバー本体部562の中間位置には回動孔56Bが形成されていて、回動孔56Bは持針器本体60に連結されている。
かかる構成とすることにより、操作ホイール39を右側に装着した左利き用の持針器1を容易に構成することができる。
また、ケーシング61の上部には、この傾斜と対応する開口部61Hが形成されるとともに、開口部61Hにはカバー61Cが装着されるようになっている。
また、壁部61Aの内方側の面には、筒状部62と反対側に向かって平行に伸びる一対の保持壁部61Cが形成されていて、一対の保持壁部61Cの間には、筒状部62から貫通孔61Bを介して配置された挟持アーム駆動部材20が収容されている。
また、保持壁部61Cには、第2駆動部50のピストン回動部材51が、支持軸31及びベアリング54Bを介して回動可能に支持されている。
また、ケーシング61の下部には連結孔61Pが形成されており、支点50Cにおいて、操作レバー56の回動孔56Bが回動可能に連結されている。
まず、操作ホイール39が左回転された状態では、第3制御リンク38は、支点35Cを中心にして、図3において、二点鎖線で示すような姿勢となる。
その結果、図6(A)に示すように、ピストン部材32は矢印F31方向に引っ張られて後退側に位置するので、挟持アーム駆動部材20を構成する第1挟持アーム駆動部材201及び第2挟持アーム駆動部材202がそれぞれ矢印T1方向に移動し、第1アーム回動部材111及び第2アーム回動部材112を、回動軸15の周りにそれぞれ矢印R11方向及び矢印R12方向に回動して、第1挟持アーム部12A及び第2挟持アーム部12Bが開いた状態とする。
その結果、図6(B)に示すように、ピストン部材32は矢印F33方向に押圧して前進側に位置させるので、挟持アーム駆動部材20を構成する第1挟持アーム駆動部材201及び第2挟持アーム駆動部材202がそれぞれ矢印T2方向に移動し、第1アーム回動部材111及び第2アーム回動部材112を、回動軸15の周りにそれぞれ矢印R21方向及び矢印R22方向に回動して、第1挟持アーム部12A及び第2挟持アーム部12Bを閉じさせる。
そこで、図示しない操作レバーを操作して、図6(C)に示すように、第2駆動部50を矢印R51方向に回動させる。
第2駆動部50を矢印R51方向に回動させると、挟持アーム駆動部材20を構成する第1挟持アーム駆動部材201及び第2挟持アーム駆動部材202は、それぞれ矢印T2方向及び矢印T1方向に移動し、第1アーム回動部材111及び第2アーム回動部材112を、回動軸15の周りに矢印R10方向に回動して、第1挟持アーム部12A及び第2挟持アーム部12Bの姿勢が変化する。
第2駆動部50を矢印R52方向に回動させると、挟持アーム駆動部材20を構成する第1挟持アーム駆動部材201及び第2挟持アーム駆動部材202は、それぞれ矢印T1方向及び矢印T2方向に移動し、第1アーム回動部材111及び第2アーム回動部材112を、回動軸15の周りに矢印R20方向に回動して、第1挟持アーム部12A及び第2挟持アーム部12Bの姿勢が変化する。
(2)次に、図7Bに示すように、例えば、狭小空間に位置する第1の生体組織S1及び第2の生体組織S2の近傍に、第1挟持アーム部12A及び第2挟持アーム部12Bで挟持した縫合針100を配置する。
そして、第1挟持アーム部12A及び第2挟持アーム部12Bを、回動軸15周りに矢印R20方向に回動して、第1の生体組織S1に対して縫合針100の長手方向に縫合針100を突き刺す。このとき、第1の生体組織S1に対する持針器1の位置は適宜調整する。
(3)次いで、図7Cに示すように、縫合針100を第1の生体組織S1から第2の生体組織S2側に突き出す。
(4)次いで、第1挟持アーム部12A及び第2挟持アーム部12Bを開いて縫合針100を挟持しなおして、第1の生体組織S1と第2の生体組織S2を突き当てるとともに第2の生体組織S2に突き刺して、縫合針100をさらに運針して第1の生体組織S1と第2の生体組織S2を縫合する。
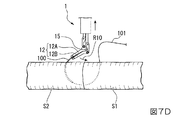
その後、図7Dに示すように、縫合された第2の生体組織S2から縫合針100が突出したら、縫合針100を持ち換える。そして、持ち換えた縫合針100をを、第1挟持アーム部12A及び第2挟持アーム部12Bを回動軸15の周りに矢印R10方向に回動して、縫合針100を第2の生体組織S2から取り出す。このとき、第2の生体組織S2に対する持針器1の位置は適宜調整する。
次に、第1挟持アーム部12A及び第2挟持アーム部12Bが開いた状態で操作レバー56を矢印R56F方向に操作して、第1挟持アーム部12A及び第2挟持アーム部12Bを開いた状態で回動させて、血管Y3近傍に配置する。
次いで、操作ホイール39を矢印R39方向に回動する操作をして、第1挟持アーム部12A及び第2挟持アーム部12Bを互いに閉じる側に回動させて、一対の挟持アーム部12によって血管Y3を把持する。
以上のように、把持器1Aを使用することによって、例えば、血管をはじめとする生体の一部や生体組織の姿勢を容易かつ安定して変えることが可能となり、挟小空間内の小さなスペースにおける対象物の把持や向き変更等、困難な手技を効率的に行うことができる。
また、一実施形態に係る把持器1Aによれば、狭小空間において、対象物を垂直接線方向に安定的かつ効率的に取廻すことができる。
アタッチメントは、例えば、挟持部10を一体的に着脱することが可能な構成とされていて、第1アーム回動部材111と、第2アーム回動部材112と、回動軸15とを備えている。なお、第1アーム回動部材111と、第2アーム回動部材112と、回動軸15とを個別に着脱することができる構成としてもよいし、回動軸15を含まない構成や挟持アーム駆動部材20の一部を含む構成としてもよく、任意に設定することが可能である。
例えば、上記実施の形態においては、第1アーム回動部材111の支持軸と第2アーム回動部材112の支持軸が、ともに回動軸15と共用されている場合について説明したが、第1アーム回動部材111と第2アーム回動部材112のそれぞれの支持軸又はいずれか一方の支持軸を、回動軸15と独立して設けてもよい。
Y3 血管(対象物)
1 持針器(把持器)
1A 把持器
10 挟持部
111B 連結孔(第1連結部)
112B 連結孔(第2連結部)
11 一対のアーム回動部材
111 第1アーム回動部材
112 第2アーム回動部材
12 一対の挟持アーム部
12A 第1挟持アーム部
12B 第2挟持アーム部
14 挟持爪部
14A 第1挟持爪部
14B 第2挟持爪部
15 回動軸(支持軸)
20 挟持アーム駆動部材
201 第1挟持アーム駆動部材(第1アーム駆動部材)
202 第2挟持アーム駆動部材(第2アーム駆動部材)
30 第1駆動部
39 操作ホイール(挟持アーム姿勢保持部材)
50 第2駆動部
100 縫合針
Claims (4)
- 対象物を把持する把持器であって、
前記対象物を挟持する第1挟持アーム部を有し支持軸周りに回動可能とされる第1アーム回動部材と、
前記第1挟持アーム部と一対とされ前記対象物を前記第1挟持アーム部と協働して挟持する第2挟持アーム部を有し支持軸周りに回動可能とされる第2アーム回動部材と、
前記第1アーム回動部材に連結されて前記第1アーム回動部材を回動させる第1アーム駆動部材と、
前記第2アーム回動部材に連結されて前記第2アーム回動部材を回動させる第2アーム駆動部材と、
前記第1アーム駆動部材及び前記第2アーム駆動部材を介して前記第1アーム回動部材と前記第2アーム回動部材を回動することにより、前記第1挟持アーム部及び前記第2挟持アーム部を開閉させる第1駆動部と、
前記支持軸の軸線と平行に形成された回動軸周りに、前記一対の挟持アーム部を回動させる第2駆動部と、
を備え、
前記第1アーム駆動部材は、前記第1アーム回動部材に回動トルクを生じさせる第1連結部と前記第1駆動部とを連結し、
前記第2アーム駆動部材は、前記第2アーム回動部材に回動トルクを生じさせる第2連結部と前記第1駆動部とを連結し、
前記第1駆動部は、
前記第1アーム駆動部材及び前記第2アーム駆動部材を、前記一対の挟持アーム部に対して同方向に進退させることによって、前記第1挟持アーム部と前記第2挟持アーム部とを開閉するように構成され、
前記第2駆動部は、
前記第1アーム駆動部材及び前記第2アーム駆動部材を互いに反対向きに進退することにより、前記一対の挟持アーム部を前記回動軸の軸線周りに回動させるように構成されていることを特徴とする把持器。 - 請求項1に記載の把持器であって、
前記第1駆動部は、
前記第1アーム駆動部材及び前記第2アーム駆動部材の前記一対の挟持アーム部に対する進退位置を保持して、前記第1挟持アーム部と前記第2挟持アーム部の相対的な位置を保持する挟持アーム姿勢保持部材を備えることを特徴とする把持器。 - 請求項1又は2に記載の把持器に用いられ、前記第1アーム回動部材と、前記第2アーム回動部材とを備え、前記第1アーム回動部材及び前記第2アーム回動部材は、それぞれ前記第1アーム回動部材及び前記第2アーム駆動部材に対して、着脱可能な連結部を備えることを特徴とする把持器アタッチメント。
- 請求項1又は2に記載の把持器において、前記第1挟持アーム部及び前記第2挟持アーム部により挟持する対象物が縫合針であることを特徴とする持針器。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013200150A JP5922075B2 (ja) | 2013-09-26 | 2013-09-26 | 把持器、持針器及びアタッチメント |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013200150A JP5922075B2 (ja) | 2013-09-26 | 2013-09-26 | 把持器、持針器及びアタッチメント |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015065989A JP2015065989A (ja) | 2015-04-13 |
| JP5922075B2 true JP5922075B2 (ja) | 2016-05-24 |
Family
ID=52833443
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013200150A Expired - Fee Related JP5922075B2 (ja) | 2013-09-26 | 2013-09-26 | 把持器、持針器及びアタッチメント |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5922075B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2552292Y2 (ja) | 1992-08-28 | 1997-10-29 | 三菱重工業株式会社 | コンクリートポンプ車のホッパレベル検出装置 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016063851A1 (ja) * | 2014-10-21 | 2016-04-28 | 並木精密宝石株式会社 | 挟み装置 |
| KR101661452B1 (ko) * | 2015-05-22 | 2016-10-10 | 주식회사 엔티로봇 | 미세 봉합수술용 로봇 |
| JP6683368B2 (ja) * | 2016-03-31 | 2020-04-22 | 国立大学法人鳥取大学 | 医療用鉗子 |
| JP6622151B2 (ja) * | 2016-06-29 | 2019-12-18 | 株式会社産業情報総合研究所 | 把持器、持針器及びアタッチメント |
| WO2022042191A1 (zh) | 2020-08-28 | 2022-03-03 | 北京和华瑞博医疗科技有限公司 | 夹针装置、腿支架装置 |
| CN111803200B (zh) * | 2020-08-28 | 2023-06-09 | 北京和华瑞博医疗科技有限公司 | 夹针装置及固定装置 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002253554A (ja) * | 2001-03-02 | 2002-09-10 | Japan Science & Technology Corp | 持針鉗子 |
| JP2002263109A (ja) * | 2001-03-12 | 2002-09-17 | Olympus Optical Co Ltd | 外科用処置具 |
| JP4402313B2 (ja) * | 2001-03-23 | 2010-01-20 | オリンパス株式会社 | 外科用処置具および外科用処置装置 |
| JP2002291765A (ja) * | 2001-03-30 | 2002-10-08 | Olympus Optical Co Ltd | 外科用処置具用の保持具 |
| JP2003135473A (ja) * | 2001-11-01 | 2003-05-13 | Mizuho Co Ltd | 内視鏡手術用能動鉗子 |
| JP4460890B2 (ja) * | 2003-12-15 | 2010-05-12 | 衛 光石 | 多自由度マニピュレータ |
| JP2005319164A (ja) * | 2004-05-11 | 2005-11-17 | Olympus Corp | 内視鏡用処置具 |
| JP3884046B2 (ja) * | 2005-05-13 | 2007-02-21 | テルモ株式会社 | 外科用器具 |
| JP4972224B1 (ja) * | 2011-11-25 | 2012-07-11 | 泉工医科工業株式会社 | 把持器、持針器及びアタッチメント |
-
2013
- 2013-09-26 JP JP2013200150A patent/JP5922075B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2552292Y2 (ja) | 1992-08-28 | 1997-10-29 | 三菱重工業株式会社 | コンクリートポンプ車のホッパレベル検出装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015065989A (ja) | 2015-04-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5922075B2 (ja) | 把持器、持針器及びアタッチメント | |
| JP4654165B2 (ja) | 作業機構及びマニピュレータ | |
| JP6778246B2 (ja) | しまい込めるナイフブレードを持つ手術器具 | |
| JP4972224B1 (ja) | 把持器、持針器及びアタッチメント | |
| JP4938156B2 (ja) | 手術用鉗子 | |
| EP3441017A1 (en) | Geared actuation mechanism and surgical clip applier including the same | |
| CN106572889B (zh) | 机器人控制的具有机械优势的夹持 | |
| JP3791893B2 (ja) | 外科用処置具 | |
| EP2717786B1 (en) | Offset jaw suturing device and system | |
| KR20070039065A (ko) | 반로봇 봉합 장치 | |
| EP2238919A2 (en) | Endoscopic apparatus for manipulating tissue | |
| JP6856363B2 (ja) | 給電式内視鏡縫合デバイス | |
| CN114469202B (zh) | 一种偏摆控制机构及其应用的多自由度柔性器械 | |
| JP2013529981A (ja) | 内視鏡下縫合デバイス、システム及び縫合方法 | |
| JP2017523853A (ja) | 機械的利益把握のロボット制御 | |
| JP2007301692A (ja) | マニピュレータ | |
| JP2004154164A (ja) | 多自由度型処置具 | |
| JP5663088B2 (ja) | 鉗子及び鉗子ユニット | |
| JP6432175B2 (ja) | 内視鏡用処置具 | |
| JP6622151B2 (ja) | 把持器、持針器及びアタッチメント | |
| WO2017145335A1 (ja) | 内視鏡用持針器、縫合セット、ならびに縫合システム | |
| WO2016157211A1 (en) | An automated needle holder and suturing device | |
| JP6744700B2 (ja) | 把持器及び持針器 | |
| JP5695835B2 (ja) | 外科用処置具 | |
| JP2005319164A (ja) | 内視鏡用処置具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150216 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151016 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151027 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151225 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160322 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160413 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5922075 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |