本発明の第1の実施態様によると、モータと、焼成室を有する自動製パン機であり、前記焼成室には、粉からパンをつくるための第1の調理容器と、穀物粒からパンをつくるための第2の調理容器を着脱可能であり、前記第1の調理容器は、パン材料を混練するための練り羽根を有し、前記第2の調理容器は、穀物粒を粉砕するためのミル羽根と、パン材料を混練するための練り羽根と、を有し、前記第1の調理容器は、当該調理容器の底部に前記練り羽根を回転させるための第1の回転体と、当該第1の回転体の両端に形成された第1の係合部を有し、前記第2の調理容器は、当該調理容器の底部に前記練り羽根を回転させるための第1の回転体と、当該第1の回転体の両端に形成された第1の係合部と、前記ミル羽根を回転させるための第2の回転体と、当該第2の回転体に形成された第2の係合部を有し、前記第1の調理容器の第1の係合部の形状と、前記第2の調理容器の第1の係合部の形状とを異ならせたことを特徴とする。
このため、ミル羽根を有する第2の調理容器は、第2の回転体を配置する空間を確保しつつ、第1の係合部を有しているため、自動製パン機の本体からのモータの回転力を、第1の回転体と第2の回転体に伝えることが可能である。一方、第1の調理容器は、第2の回転体を有していないために、第2の調理容器の第1の係合部と、第1の係合部の形状を異ならせることにより、より自動製パン機本体側と第1の係合部との接続を確実なものにすることが可能である。
このため、ミル羽根を有する第2の調理容器は、第2の回転体を配置する空間を確保しつつ、第1の係合部を有しているため、自動製パン機の本体からのモータの回転力を、第1の回転体と第2の回転体に伝えることが可能である。一方、第1の調理容器は、第2の回転体を有していないために、第2の調理容器の第1の係合部と、第1の係合部の先端の幅を異ならせることにより、より自動製パン機本体側と第1の係合部との接続を確実なものにすることが可能である。
このため、ミル羽根を有する第2の調理容器は、第2の回転体を配置する空間を確保しつつ、第1の係合部を有しているため、自動製パン機の本体からのモータの回転力を、第1の回転体と第2の回転体に伝えることが可能である。一方、第1の調理容器は、第2の回転体を有していないために、第2の調理容器の第1の係合部の先端よりも、第1の係合部の先端の幅を広くすることにより、より自動製パン機本体側と第1の係合部との接続を確実なものにすることが可能である。
本発明の第4の実施態様によると、第1の調理容器の第1の係合部の先端と、第2の調理容器の第1の係合部の先端と、は共に傾斜しており、第1の調理容器の第1の係合部の先端の傾斜は、第2の調理容器の第1の係合部の先端の傾斜よりも勾配がゆるやかであることを特徴とする。
このため、ミル羽根を有する第2の調理容器は、第2の回転体を配置する空間を確保しつつ、第1の係合部を有しているため、自動製パン機の本体からのモータの回転力を、第1の回転体と第2の回転体に伝えることが可能である。一方、第1の調理容器は、第2の回転体を有していないために、第2の調理容器の第1の係合部の先端よりも、第1の係合部の先端の勾配をゆるやかにすることにより、より自動製パン機本体側と第1の係合部との接続を確実なものにすることが可能である。
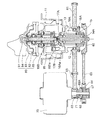
本発明の本実施例にかかる自動製パン機の全体構成について説明する。図1は、本実施例にかかる自動製パン機の斜視図であり、図2は、当該自動製パン機の蓋体を開けた状態を示す斜視図である。図3は、本実施例にかかる自動製パン機の断面図である。図4は、本実施例にかかる自動製パン機の一部拡大断面図である。
図1〜3において、本実施例にかかる自動製パン機1は、略直方体形状の機器本体10を備えている。機器本体10の上面の一部には、操作部20が設けられている。
操作部20は、操作キー群と、表示部とによって構成されている。操作キー群には、例えば、スタートキー、取り消しキー、タイマーキー、予約キー、パンの調理コースなどを選択する選択キー等が含まれる。調理コースには、例えば、米粒を出発原料に用いてパンを製造するコース、米粉を出発原料に用いてパンを製造するコース、小麦粉を出発原料に用いてパンを製造するコースなどが含まれる。表示部は、例えば、液晶表示パネル等によって構成され、時間、操作キー群によって設定された内容、エラー等を表示するものである。
機器本体10の内部には、焼成室30が設けられている。焼成室30は、上面が開口した箱形状に形成されている。焼成室30の内部には、パン生地、ケーキ、餅などの調理材料を収容する調理容器40が着脱自在に収納される。
また、焼成室30の内部には、図3に示すように、調理容器40を加熱する加熱部の一例であるシーズヒータ31と、焼成室30内の温度を検知する温度検知部の一例である温度センサ32とが設けられている。
シーズヒータ31は、焼成室30に収容された調理容器40の下部を、隙間を空けて包囲するように配置されている。温度センサ32は、焼成室30内の平均的な温度を検知することができるように、シーズヒータ31から少し離れた位置に配置されている。
焼成室30の上面の開口部204は、機器本体10の上部に設けられた蓋50によって開閉される。蓋50は、機器本体10の上方後部(図3の右上側)に設けられたヒンジ部10Aに回動自在に取り付けられている。蓋50は、蓋本体51と、外蓋52とを備えている。蓋本体51には、グルテンやドライイーストなどの粉状の副材料を収容する副材料容器53と、レーズン、ナッツなどの比較的体積の大きな副材料を収容する副材料容器54とが取り付けられている。副材料容器53,54は、調理容器40の上方に配置されている。外蓋52は、副材料容器53,54の上部の開口部204を開閉可能に取り付けられている。
副材料容器53の底壁は、開閉板53aで構成されている。開閉板53aは、副材料容器53内の副材料を調理容器40内に投入することができるように回動可能に構成されている。同様に、副材料容器54の底壁は、開閉板54aで構成されている。開閉板54aは、副材料容器54内の副材料を調理容器40内に投入することができるように回動可能に構成されている。開閉板53a,54aの開閉のタイミングは、後述する制御部90により制御される。
また、焼成室30の底壁30aの略中心部には、調理容器支持部11が設けられている。調理容器支持部11は、図4に示すように、略筒状に形成され、焼成室30の底壁30aから下方に離れるに従って、内径が段階的に小さくなるように形成されている。調理容器支持部11の外周面の下端部には、ベアリング12を介して第1のプーリ61が設けられている。
調理容器支持部11の下部の中心穴には、略円筒形の第3のワンウェイクラッチ13が設けられている。第3のワンウェイクラッチ13の内側には、略円筒形の本体側練り軸16Aが垂直方向に延在するように設けられている。第3のワンウェイクラッチ13は、本体側練り軸16Aの正方向(例えば、時計回り)の回転を許容する一方、本体側練り軸16Aの逆方向(例えば、反時計回り)の回転を規制するように構成されている。
本体側練り軸16Aの外周下部には、第2のワンウェイクラッチ15が設けられている。第2のワンウェイクラッチ15は、第1のプーリ61と係合するように設けられている。第2のワンウェイクラッチ15は、第1のプーリ61が正方向に回転するとき、本体側練り軸16Aを正方向に回転させる一方、第1のプーリ61が逆方向に回転するとき、本体側練り軸16Aが逆方向に回転しないように本体側練り軸16Aの回転を規制するように構成されている。
本体側練り軸16Aの内部には、略円柱状の本体側ミル軸14Aが垂直方向に延在するように設けられている。本体側ミル軸14Aは、本体側練り軸16Aに対して相対回転可能に設けられている。本体側ミル軸14Aの下端部には、第2のプーリ62が固定されている。
また、焼成室30の外側であって機器本体10の内部には、モータの一例であるインバーターモーター70が設けられている。インバーターモーター70は、出力軸71の単位時間当たりの回転数及び回転方向(正方向、逆方向)を自在に変更することができるモータである。
インバーターモーター70の出力軸71の外周上部には、第3のプーリ63が固定されている。第3のプーリ63と第1のプーリ61には、第1のベルト65が架け回されている。インバーターモーター70が駆動されて出力軸71が回転するとき、当該出力軸71の回転力は、第3のプーリ63、第1のベルト65を介して第1のプーリ61に伝達される。
また、インバーターモーター70の出力軸71の外周下部には、ベアリング67を介して第4のプーリ64が設けられている。第4のプーリ64と第2のプーリ62には、第2のベルト66が架け回されている。
また、インバーターモーター70の出力軸71の外周面において第3のプーリ63と第4のプーリ64との間には、第1のワンウェイクラッチ68が設けられている。第1のワンウェイクラッチ68は、出力軸71が逆方向に回転するとき、第4のプーリ64を逆方向に回転させる一方、出力軸71が正方向に回転するとき、第4のプーリ64が正方向に回転しないように第4のプーリ64の回転を規制する。
また、本体側ミル軸14Aの上端部には、本体側コネクタ17Aが固定されている。本体側コネクタ17Aは、略円柱形の容器側ミル軸14Bの下端部に固定された容器側コネクタ17Bと係合可能に構成されている。本体側コネクタ17Aと容器側コネクタ17Bとが係合した状態で、本体側ミル軸14Aが回転したとき、容器側ミル軸14Bが回転する。
また、本体側練り軸16Aの上端部には、係合片16Aaが設けられている。係合片16Aaは、略円筒形の容器側練り軸16Bの下端部に固定された係合片16Baと係合可能に構成されている。本体側練り軸16Aが回転するとき、係合片16Aaが係合片16Baに係合し、容器側練り軸16Bが回転する。
容器側ミル軸14Bは、容器側練り軸16Bの内側に円筒形の軸受け18を介して設けられている。容器側ミル軸14Bと容器側練り軸16Bとは、調理容器40が焼成室30内にセットされたとき、調理容器40の底部の中心部に設けられた貫通穴を通じて調理容器40内に突出するように設けられている。
調理容器40の底部には、図3に示すように、有底筒状の凹部41が形成されている。また、調理容器40の底部外面には、容器側練り軸16Bを取り囲むように筒状の台座42が設けられている。調理容器40は、台座42が調理容器支持部11に載置され、本体側コネクタ17Aと容器側コネクタ17Bとが係合されることで焼成室30内にセットされる。一方、調理容器40は、本体側コネクタ17Aと容器側コネクタ17Bとの係合が外されることで、焼成室30内から取り外すことができる。なお、台座42は、調理容器40とは別に形成してもよいし、調理容器40と一体的に形成してもよい。
容器側ミル軸14B及び容器側練り軸16Bの調理容器40の内部に突出する部分には、羽根ユニット80が着脱自在に取り付けられている。
羽根ユニット80は、キャップ81と、ミル羽根82と、ドーム状カバー83と、練り羽根84と、セーフティカバー85とを備えている。
キャップ81は、容器側ミル軸14Bの先端部に着脱自在に設けられている。ミル羽根82は、キャップ81の外周面から外方に突出するように設けられている。ミル羽根82は、米粒などの穀物粒を粉砕して製パン原料を製造するための羽根である。調理容器40が焼成室30内にセットされるとともにキャップ81が容器側ミル軸14Bに取り付けられた状態において、ミル羽根82は、概ね調理容器40の凹部41内に位置するように設けられている。ミル羽根82の具体的構成や好ましい形状等については、後で詳しく説明する。
ドーム状カバー83は、ミル羽根82を上方から覆うように形成されている。ドーム状カバー83には、図5及び図6に示すように、ドーム状カバー83の内側の空間とドーム状カバー83の外側の空間とを連通する複数の窓部83aが設けられている。ミル羽根82の回転により製造された製パン原料は、複数の窓部83aを通じてドーム状カバー83の内側の空間とドーム状カバー83の外側の空間に排出される。
練り羽根84は、ドーム状カバー83の外面に垂直方向に立設するように設けられている。練り羽根84は、調理容器40内の製パン原料を混練してパン生地を製造するための羽根である。
セーフティカバー85は、ドーム状カバー83の下端部に取り付けられ、ミル羽根82を下方から覆うように形成されている。また、セーフティカバー85は、その一部が容器側練り軸16Bの内面に嵌合するように、容器側練り軸16Bに取り付けられている。容器側練り軸16Bが回転するとき、セーフティカバー85、ドーム状カバー83、及び練り羽根84が一体的に回転する。調理容器40が焼成室30内にセットされるとともにセーフティカバー85が容器側練り軸16Bに取り付けられた状態において、ミル羽根82は、概ね調理容器40の凹部41よりも上方に位置するように設けられている。また、セーフティカバー85には、調理容器40内に入れられた米粒や水などの材料をドーム状カバー83内に取り込むための開口部204(図示せず)が設けられている。
また、機器本体10の操作部20の下方には、各部の駆動を制御する制御部90が設けられている。制御部90には、複数の調理コースに対応する調理シーケンスが記憶されている。調理シーケンスとは、浸水、ミル、冷却、練り、発酵、焼成などの各製造工程を順に行うにあたって、各製造工程においてシーズヒータ31の通電時間、温調温度、インバーターモーター70の回転方向、回転速度、開閉板53a,54aの開閉のタイミングなどが予め決められている調理の手順のプログラムをいう。制御部90は、操作部20にて選択された特定の調理コースに対応する調理シーケンスと温度センサ32の検知温度に基づいて、インバーターモーター70、シーズヒータ31、開閉板53a,54aの駆動を制御する。
次に、図6を用いて、インバーターモーター70の出力軸71が正方向に回転されたときの動作について説明する。図6は、インバーターモーター70に関連する部品の構成を示す断面図である。図6において、斜線部は、正方向に回転する部品を示している。
図6に示すように、インバーターモーター70の出力軸71が正方向に回転されたとき、当該出力軸71の回転力が、第3のプーリ63及び第1のワンウェイクラッチ68に伝達され、これらの部品が正方向に回転する。
第3のプーリ63の回転力は、第1のベルト65、第1のプーリ61、第2のワンウェイクラッチ15に伝達され、これらの部品が正方向に回転する。第2のワンウェイクラッチ15は、第1のプーリ61が正方向に回転するので、本体側練り軸16Aを正方向に回転させる。このとき、第3のワンウェイクラッチ13は、本体側練り軸16Aの正方向の回転を許容する。本体側練り軸16Aの回転力は、容器側練り軸16B、セーフティカバー85、ドーム状カバー83、及び練り羽根84に伝達され、これらの部品が正方向に回転する。
一方、第1のワンウェイクラッチ68は、出力軸71が正方向に回転するので、第4のプーリ64が正方向に回転しないように第4のプーリ64の回転を規制する。
すなわち、インバーターモーター70の出力軸71が正方向に回転されたときは、練り羽根84が正方向に回転する一方で、ミル羽根82は回転しないようになっている。
次に、図7を用いて、インバーターモーター70の出力軸71が逆方向に回転されたときの動作について説明する。図7は、インバーターモーター70に関連する部品の構成を示す断面図である。図7において、斜線部は、逆方向に回転する部品を示している。
図7に示すように、インバーターモーター70の出力軸71が逆方向に回転されたとき、当該出力軸71の回転力が、第3のプーリ63及び第1のワンウェイクラッチ68に伝達され、これらの部品が逆方向に回転する。
第3のプーリ63の回転力は、第1のベルト65、第1のプーリ61、第2のワンウェイクラッチ15に伝達され、これらの部品が逆方向に回転する。第2のワンウェイクラッチ15は、第1のプーリ61が逆方向に回転するので、本体側練り軸16Aが逆方向に回転しないように本体側練り軸16Aの回転を規制する。
一方、第1のワンウェイクラッチ68は、出力軸71が逆方向に回転するので、第4のプーリ64を逆方向に回転させる。この第4のプーリ64の回転力は、第2のベルト66、第2のプーリ62、本体側ミル軸14A、容器側ミル軸14B、キャップ81、ミル羽根82に伝達され、これらの部品が逆方向に回転する。なお、このとき、第3のワンウェイクラッチ13は、本体側ミル軸14Aの回転力により、本体側練り軸16Aが逆方向に回転(いわゆる、共回り)することを規制する。
すなわち、インバーターモーター70の出力軸71が逆方向に回転されたときは、ミル羽根82が逆方向に回転する一方で、練り羽根84は回転しないようになっている。
なお、本実施例において、第1のプーリ61は、第2〜第4のプーリ62〜64に比べて大きな直径を有するように構成されている。これにより、インバーターモーター70の出力軸71の回転速度に対する練り羽根84の回転速度を低速(例えば、250rpm)にするとともに、高トルクが得られるようにしている。また、練り羽根84の回転速度に対するミル羽根82の回転速度を高速(例えば、4000rpm)にするようにしている。
なお、本実施例において、「ミル軸」は、本体側コネクタ17Aと容器側コネクタ17Bとが係合されることにより連結された本体側ミル軸14Aと容器側ミル軸14Bとにより構成されている。また、「練り軸」は、係合片16Aaと係合片16Baとが係合されることにより連結された本体側練り軸16Aと容器側練り軸16Bとにより構成されている。また、ミル羽根82の回動軸205となるミル軸の中心軸と、練り羽根84の回動軸205となる練り軸の中心軸とは、同一軸上に位置するように設けられている。
また、本実施例において、「駆動力切換部」は、ベアリング12,67、第1〜第4のプーリ61〜64、第1及び第2のベルト65,66、第1〜第3のワンウェイクラッチ68,15,13により構成されている。「駆動力切換部」は、ミル軸及び練り軸へのモータ70の回転駆動力の伝達経路を切り換えるものである。
次に、図8、図9〜図11を用いて、ミル羽根82の好ましい形状等について説明する。図8は、ドーム状カバー83に対するミル羽根82の相対位置を示す底面図である。図9Aはミル羽根82の斜視図であり、図9B及び図9Cはミル羽根82の側面図である。
図8に示すように、ミル羽根82の両端部は、穀物粒を切るのではなく、すり潰すように形成されている。具体的には、ミル羽根82の両端部は、平面視においてドーム状カバー83の内周端部に沿うように、一定の長さのすり潰し領域82Aを有するように形成されている。これにより、穀物粒を効率良く製パン原料にすることでき、ミル羽根82の回転速度を低下させることができる。その結果、穀物粒を製パン原料にする際、すなわちミルする際に発生する音を低減することができる。
また、ミル羽根82の両端部のエッジは、波形状に形成されている。これにより、当該エッジと穀物粒との接触面積を増やし、穀物粒のすり潰し効果を向上させることができる。また、好ましくは、ミル羽根82の両端部のエッジは、正弦波状(曲線で構成される波状)に形成される。これにより、ユーザがミル羽根82に触れることにより、ユーザの指が切れることを抑えることができる。
また、ミル羽根82の両端部のエッジは、一定の厚さ(例えば、1.5mm)を有する(すなわち、刃先を有しない)ように構成されている。これにより、ユーザがミル羽根82に触れることにより、ユーザの指が切れることをより一層抑えることができる。また、当該エッジと穀物粒との接触面積を増やし、穀物粒のすり潰し効果を向上させることができる。また、ミル羽根82の全体としての強度を確保することができる。なお、ミル羽根82は、エッジを含めて均一な厚さに構成されてもよい。
また、ミル羽根82の両端部は、図10及び図11に示すように、正面から見て互いに逆方向に傾斜している。具体的には、ミル羽根82の両端部は、ミル羽根82の回転方向の下流側(最初に米粒に衝突する側)に位置する部分が、その上流側に位置する部分よりも下方に位置するように傾斜している。また、ミル羽根82の両端部の水平面に対する傾斜角度は、従来よりも大きく、例えば13度とされている。これにより、穀物粒を効率良く製パン原料にすることでき、ミル羽根82の回転速度をより一層低下させることができる。その結果、穀物粒を製パン原料にする際、すなわちミルする際に発生する音をより一層低減することができる。
なお、本実施例では、ミル羽根82の両端部のエッジを波形状に形成したが、本発明はこれに限定されない。例えば、ミル羽根82の両端部のエッジは曲線状であってもよい。
次に、図12を用いて、本実施例にかかる自動製パン機1によって実行される米粒用製パンコースの流れの一例を説明する。図12は、本実施例にかかる自動製パン機1によって実行される米粒用製パンコースの流れを示す模式図である。図12に示すように、米粒用製パンコースにおいては、浸水工程と、ミル工程と、冷却工程と、練り(提ね)工程と、発酵工程と、焼成工程とが順次に実行される。
米粒用製パンコースを開始するにあたって、ユーザは、以下の動作を行う。
まず、ユーザは、容器側ミル軸14Bにキャップ81を取り付けるとともに、セーフティカバー85の一部を容器側練り軸16Bの内面に嵌合させる。これにより、羽根ユニット80が、図3に示すように、調理容器40内にセットされる。
その後、ユーザは、米粒、水、調味料(例えば、食塩、砂糖、ショートニング)等の主材料を調理容器40内に入れるとともに、パンの製造工程の途中で自動投入するドライイースト、グルテン、ナッツなどの副材料を副材料容器53,54に入れる。
その後、ユーザは、調理容器40を焼成室30内にセットし、蓋50により焼成室30の開口部204を閉じる。その後、ユーザは、操作部20によって米粒用製パンコースを選択し、スタートキーを押す。これにより、制御部90が、米粒を出発原料に用いてパンを製造する米粒用製パンコースの制御動作を開始する。
米粒用製パンコースがスタートされると、制御部90の指令によって浸水工程が開始される。浸水工程は、米粒に水を含ませることによって、その後に行われるミル工程において、米粒を芯まで粉砕しやすくするための工程である。浸水工程では、調理容器40に予め投入された主材料の静置状態が所定時間(本実施例では30分)維持される。
浸水工程の開始から所定時間が経過すると、制御部90の指令によって浸水工程が終了され、ミル工程が開始される。ミル工程は、調理容器40内に入れられた米粒を粉砕して製パン原料を製造する工程である。ミル工程において、制御部90は、インバーターモーター70を制御して出力軸71を逆方向に回転させ、図7を用いて上述したように、米粒と水とが含まれる混合物の中でミル羽根82を回転(例えば、4000rpm)させる。これにより、米粒が粉砕される。
粉砕された米粒と水とが含まれる混合物は、ドーム状カバー83の複数の窓部83aを通じてドーム状カバー83の外側の空間に排出される。これに伴い、調理容器40の凹部41内の米粒と水とを含む混合物がセーフティカバー85に設けられた開口部204(図示せず)からドーム状カバー83の内側の空間に取り込まれる。このようにして、次々に米粒がミル羽根82によって粉砕され、その結果、ペースト状の粉砕粉を含む製パン原料が製造される。
なお、ミル羽根82と衝突する米粒の大きさが大きいときは、大きな衝突音が発生する。このため、制御部90は、ミル工程の開始から所定時間(例えば、5分間)は、ミル羽根82を低速回転させ、その後、ミル羽根82を高速回転させるようにインバーターモーター70を制御することが好ましい。これにより、ミル工程における大きな衝突音の発生を抑えることができる。
ミル工程の開始から所定時間(本実施例では70分)経過すると、制御部90の指令によってミル工程が終了され、冷却工程が開始される。冷却工程は、ミル工程によって上昇した調理容器40内の製パン原料の温度を、ドライイーストが活発に働く温度(例えば、30℃前後)まで下げる工程である。冷却工程において、制御部90は、インバーターモーター70の駆動を停止させる。
冷却工程の開始から所定時間(本実施例では32分)経過すると、制御部90の指令によって冷却工程が終了され、練り工程が開始される。練り工程は、製パン原料にドライイースト、グルテン、ナッツなどの副材料を投入し、これらを混練して、パン生地を製造する工程である。練り工程において、制御部90は、開閉板53a,54aを開放して調理容器40内に副材料を投入するとともに、インバーターモーター70を制御して出力軸71を正方向に回転させ、図6を用いて上述したように、製パン原料と副材料とが含まれる混合物の中で練り羽根84を低速回転(例えば、250rpm)させる。これにより、製パン原料と副材料とが含まれる混合物が混練され、所定の弾力を有するパン生地が製造される。
なお、練り工程の間、練り羽根84を同じ速度で継続して回転させると、特に製パン原料と副材料とが含まれる混合物の混練が進んでいない練り工程の初期において、製パン原料や副材料が調理容器40の外側に飛び散るおそれがある。このため、制御部90は、図13に示すように、練り工程が進むに連れて練り羽根84の回転数が徐々に増加するようにインバーターモーター70を制御することが好ましい。これにより、練り工程において、製パン原料や副材料が調理容器40の外側に飛び散ることを抑えることができる。
練り工程の開始から所定時間(本実施例では23分)経過すると、制御部90の指令によって練り工程が終了され、発酵工程が開始される。発酵工程は、パン生地を発酵させる工程である。発酵工程において、制御部90は、シーズヒータ31を制御して、焼成室30の温度を、発酵が進む温度(例えば、38℃)に維持する。
発酵工程の開始から所定時間(本実施例では75分)経過すると、制御部90の指令によって発酵工程が終了され、焼成工程が開始される。焼成工程は、発酵したパン生地を焼成してパンを焼き上げる工程である。焼成工程において、制御部90は、シーズヒータ31を制御して、焼成室30の温度を、パン焼きを行うのに適した温度(例えば、125℃)まで上昇させる。
焼成工程の開始から所定時間(本実施例では40分)経過すると、制御部90の指令によって焼成工程が終了される。これにより、全ての製パン工程が終了する。全ての製パン工程が終了したことは、例えば、操作部20の液晶パネルの表示や報知音などにより、ユーザに知らされる。
本実施例にかかる自動製パン機1によれば、単一のインバーターモーター70によりミル羽根82と練り羽根84の両方を回転させるようにしているので、モータを2つ備える従来の自動製パン機よりも装置の小型化を実現することができる。
また、本実施例にかかる自動製パン機1によれば、駆動力切換部として機能するベアリング12,67、第1〜第4のプーリ61〜64、第1及び第2のベルト65,66、第1〜第3のワンウェイクラッチ68,15,13を全て機器本体10の内部であって焼成室30の外部に設けているので、当該各部品に製パン原料等が詰まるなどの不具合を抑えることができる。これにより、インバーターモーター70の回転駆動力の伝達経路の切り換えをより確実に行うことができる。
また、本実施例にかかる自動製パン機1によれば、モータとしてインバーターモーター70を用いているので、ミル羽根82及び練り羽根84の回転数を可変することができる。これにより、例えば、ミル工程の開始から所定時間はミル羽根82を低速回転させることにより、ミル工程における大きな衝突音の発生を抑えることができる。
また、本実施例にかかる自動製パン機1によれば、インバーターモーター70の出力軸71の回転方向に応じて、インバーターモーター70の回転駆動力をミル軸に伝達するか、練り軸かを切り換えるようにしているので、インバーターモーター70の回転駆動力の伝達経路の切り換えをより確実に行うことができる。
また、本実施例にかかる自動製パン機1によれば、練り軸16A,16Bを中空管構造とし、当該練り軸の内部にミル軸14A,14Bを設けるようにしている。これにより、より一層の装置の小型化を図ることができる。
また、前記では、ミルと練りの両方を行う自動製パン機にインバーターモーターを使用したが、本発明はこれに限定されない。練りのみを行う一般的な自動製パン機にインバーターモーターを使用してもよい。この場合、練り羽根の回転数を可変できるので、例えば、練り工程が進むに連れて練り羽根の回転数が徐々に増加するようにインバーターモーターを制御することが可能になる。これにより、製パン原料や副材料が調理容器の外側に飛び散ることを抑えることができる。
本実施例の調理容器40の装着部分の構造について以下に具体的に説明する。
上述した実施例での説明では、調理容器40と説明しているが、本実施例装置では、複数種類(例えば2種類)の調理容器40を有しており、第1の調理容器401は、小麦粉や米粉からパンを作る際に使用する容器であり、第2の調理容器402は、米粒といった穀物粒からパンを作る際に使用する容器である。
第1の調理容器401内には、練り羽根84を着脱可能であり、第2の調理容器402内には、ミル羽根82と練り羽根84とを着脱可能である。
図13は、第1の調理容器401の斜視図を示しており、図14は第1の調理容器401を下から見た図である。また、図15は、第1の調理容器401の部分断面図である。
図14および図15に示すように、第1の調理容器401は、底部の回転軸403に容器側第2回転体404が取付けられている。この容器側第2回転体404は、略S字状の形状をしており、左右先端には下方に突となる容器側第2係合部405が形成されている。この2つの容器側第2係合部405は略同一直線上に位置している。
詳細は後ほど説明するが、第1の調理容器401を焼成室30内に配置した状態では、機器本体10側に配置されたモータからの回転駆動力をこの容器側第2回転体404が受けることが可能となる。この容器側第2回転体404は、第1の調理容器401内に配置されている練り羽根84と接続されており、この容器側第2回転体404が回転すると練り羽根84も回転する。
図16は、第2の調理容器402の斜視図を示しており、図17は第2の調理容器402を下から見た図である。また、図18は、第2の調理容器402の部分断面図である。
図17および図18に示すように、第2の調理容器402は、底部の回転軸406に容器側第2回転体404が取付けられている。この容器側第2回転体404は、略S字状の形状をしており、左右先端には下方に突となる容器側第2係合部405が形成されている。この2つの容器側第2係合部405は略同一直線上に位置している。
詳細は後ほど説明するが、第2の調理容器402を焼成室30内に配置した状態では、機器本体10側に配置されたモータからの回転駆動力をこの容器側第2回転体404が受けることが可能となる。この容器側第2回転体404は、第2の調理容器402内に配置されている練り羽根84と接続されており、この容器側第2回転体404が回転すると練り羽根84も回転する。
また、第2の調理容器402の回転軸406には、容器側第1回転体407が取付けられており、この容器側第1回転体407は、ミル羽根82と接続されている。この容器側第1回転体407が回転すると、ミル羽根82も回転する。
容器側第1回転体407は、ミル羽根82を回転させるための回転体であるために、その径が、練り羽根84を回転させる容器側第2回転体404の径よりも小さくしている。このような構成とすることにより、高速で回転させる回転体の径を大きくする場合に比べ、回転体部分や、回転体を回転させるための軸部分にかかる負担を軽減させている。
容器側第1回転体407には、回転軸406の周囲に3つの容器側第1係合部408が形成されている。詳細は後ほど説明するが、第2の調理容器402を焼成室30内に装着した状態では、機器本体10側に配置されたモータからの回転駆動力をこの容器側第1回転体407が受けることが可能となる。先ほど述べたように、この容器側第1回転体407は、第2の調理容器402内に配置されているミル羽根82と接続されており、この容器側第1回転体407が回転すると練り羽根84も回転する。
図19は、第2の調理容器402の容器側第1回転体407と、容器側第2回転体404とを示す分解斜視図である。容器側第1回転体407は、例えばシリコンゴム等の弾性体或いはステンレス等の金属で形成されている。この容器側第1回転体407に形成されている3つの容器側第1係合部408は、頂上部409から斜面410が形成されており、第2の調理容器402を本体に装着する際に、容器側第1係合部408が、後述する本体側第1係合部と確実に係合できるように考慮されている。
容器側第1回転体407の外周には、容器側第2係合部405が位置するようになっており、この容器側第2係合部405を含む容器側第2回転体404は、例えばステンレス等の金属で形成されている。ステンレス製にすることにより、使用者が調理容器を洗う際に、容器側第2回転体404がさび付くことを防止することができる。
次に、機器本体10の焼成室30底部部分の構造について以下に説明する。
図20は、焼成室30の中央部分を上から見た図である。
図20において、焼成室30の底部には、例えば樹脂からなる本体側第1回転体501と、本体側第2回転体502が配置されている。本体側第1回転体501の下方に本体側第2回転体502が配置されており、本体側第1回転体501上には、3つの本体側第1係合部503が形成されている。一方、本体側第2回転体502上には、2つの本体側第2係合部504が形成されている。また、図20に示すように、本体側第1回転体501の外周側に本体側第2係合部504が位置するようになっている。
尚、3つの本体側第1係合部503夫々には、前述した容器側第1係合部408と同様に、頂上部と斜面が形成されており、第2の調理容器402を本体に装着する際に、容器側第1係合部408の斜面410と、本体側第1係合部503の斜面とが滑って係合するようになっている。このようにすることにより、第2の調理容器402を本体に確実に装着することが可能となる。
また、図20を見ても明らかなように、本体側第1回転体501の径よりも本体側第2回転体502の径の方が大きくなっている。本体側第1回転体501は、ミル羽根82を回転させるための回転体であるために、練り羽根84を回転させるための本体側第2回転体502よりも回転速度が速くなる。
径の大きな回転体(回転軸)を高速で回転させると、回転体やその回転軸に大きな負担がかかり、故障の原因となる可能性がある。本実施例装置では、このような事態を回避するために、高速で回転する本体側第1回転体501の径を低速で回転する本体側第2回転体502の径よりも小さくすることにより、回転体やその回転軸にかかる負担をできるだけ低減させている。
尚、本実施例装置では、粉からパンを作るための第1の調理容器401の容器側第2係合部405と、穀物粒からパンを作るための第2の調理容器402の容器側第2係合部405とは、形状を異ならせている。
第1の調理容器401には、容器側第1回転体407が取付けられていないために、容器側第1回転体407を確保する空間を必要としていない。このため、第1の調理容器401の容器側第2係合部405の先端は、第2の調理容器402の容器側第2係合部405の先端よりも、幅が広くなっている。
また、第1の調理容器401の容器側第2係合部405の先端と、第2の調理容器402の容器側第2係合部405の先端は、共に先端に向けて徐々に幅が狭くなっており、表面に傾斜を有している。また、この傾斜の勾配は、第1の調理容器401の容器側第2係合部405の方が第2の調理容器402の容器側第2係合部405に比べてなだからになっている。
また、第2の調理容器402は、容器側第1回転体を回転させるために、容器側第1回転体407と容器側第2係合部405との間に隙間を有している。
更に、第2の調理容器402の容器側第2係合部405の高さは、第1の調理容器401の容器側第2係合部405の高さよりもその高さが高くなっている。第2の調理容器402は、容器側第1回転体407の容器側第1係合部408が存在するために、このように第1の調理容器401に比べて高さが高くなっている。
また、本実施例装置では、本体側第1回転体501の下方に本体側第2回転体502が配置される構造としたが、本体側第1回転体501の外周部分に、本体側第2回転体502を配置する構造としても良い。換言すれば、本体側第1回転体501と、本体側第2回転体502とが重ならないような構造としても良い。
次に、第1の調理容器401を機器本体10に装着する際の動作について説明する。第1の調理容器401を機器本体10に装着すると、機器本体10の本体側第2係合部504が、容器側第2係合部405と係合し、モータの回転により本体側第2回転体502が回転すると、その回転力が第1の調理容器401の容器側第2回転体404に伝わり、練り羽根84が回転し、練り動作が実行される。
次に、第2の調理容器402を機器本体10に装着する際の動作について説明する。第2の調理容器402を機器本体10に装着すると、機器本体10の本体側第2係合部504が、容器側第2係合部405と係合し、練り動作時に、モータの回転により本体側第2回転体502が回転すると、その回転力が第1の調理容器401の容器側第2回転体404に伝わり、練り羽根84が回転し、練り動作が実行される。
また、第2の調理容器402を機器本体10に装着した際に、機器本体10の本体側第1係合部503が、容器側第1係合部408と係合する。このため、ミル動作時には、モータの回転により本体側第1回転体501が回転すると、その回転力が第1の調理容器401の容器側第1回転体407に伝わり、ミル羽根82が回転し、ミル動作が実行される。
このように、本実施例装置では、焼成室の底部に、2つの異なる回転体である、本体側第1回転体501と本体側第2回転体502を配置した。このため、2つの異なる回転体のどちらかを回転させることにより、調理容器に搭載されたミル羽根82又は練り羽根84を回転させることが可能であり、調理容器内にクラッチといった複雑な構造を設けなくても簡単な構造で、ミル羽根82と練り羽根84の回転を実現することができる。
また、本実施例装置は、焼成室の底部に、本体側第1回転体501と本体側第2回転体502を配置し、本体側第1回転体501は、調理容器に係合する本体側第1係合部503を有し、本体側第2回転体502は、調理容器に係合する本体側第2係合部504を有し、焼成室底部を上から見ると、本体側第1回転体501の外周に本体側第2回転体502の本体側第2係合部504が位置するようになっている。
このように、本体側第1回転体501と本体側第2回転体502(の第2係合部504)を近接させることにより、第1及び第2の回転体部分をコンパクトにまとめることが可能となる。
また、ミル羽根82を回転させる高速回転用の軸を本体側第1回転体501部分にし、練り羽根84を回転させる低速回転用の軸を本体側第2回転体502部分にし、練り羽根84を回転させる低速回転用の軸(本体側第2回転体502部分)の本体側第2係合部504を、本体側第1回転体501の外周に存在させることにより、高速回転用の軸を径の小さいものにし、低速回転用の軸を径の大きいものとすることが可能となった。このように高速回転用の軸を径の小さなもので実現することにより、モータの駆動力による回転体及び軸部分の負担をできるだけ少なくすることができる。
尚、本実施例装置では、第1の調理容器401と第2の調理容器402の底部とは、容器側第1回転体407と容器側第2回転体404が配置されている部分或いはその近傍としているが、第1の調理容器401と第2の調理容器402のパン材料を入れる部分の底面部分も底部としても良い。