本発明の第1態様によれば、複数枚のディスクを収納するマガジントレイを水平方向に搬送するピッカーと、
前記マガジントレイから前記複数枚のディスクを押し出すリフターと、
上下方向に移動するように構成され、前記リフターにより押し出された前記複数枚のディスクを積層状態で保持し、複数のディスクドライブのそれぞれにディスクを供給するキャリアと、
を備えるディスク装置であって、
前記リフターは、前記ピッカーに対して水平方向に相対移動可能となるように自由度を持って取り付けられ、前記マガジントレイと一体的に水平方向に移動するように構成されている、ディスク装置を提供する。
本発明の第2態様によれば、前記キャリアは、前記複数枚のディスクのそれぞれに設けられた中心穴に挿入され、前記複数枚のディスクを保持するディスクチャックユニットを有し、
前記ディスクチャックユニットの先端部は、前記ピッカーにより搬送された前記マガジントレイが前記キャリアの真下からずれて位置するとき、前記最上部のディスクの中心穴の周辺部に接触して、当該最上部のディスクに対して水平方向に押圧力を加えるように構成されている、第1態様に記載のディスク装置を提供する。
本発明の第3態様によれば、前記ディスクチャックユニットの先端部が前記周辺部に接触する前に、前記マガジントレイが前記キャリアの略真下に位置するようにあらかじめ位置決めする位置決め機構を更に備える、第2態様に記載のディスク装置を提供する。
本発明の第4態様によれば、前記リフターと前記ピッカーとは、段付きビスにより取り付けられている、第1〜3態様のいずれか1つに記載のディスク装置を提供する。
本発明の第5態様によれば、前記段付きビスの先端部は、前記リフターを貫通して前記ピッカーに固定され、
前記段付きビスのヘッド部は、前記リフターの上側表面に接触して前記リフターの上方への移動を規制し、
前記段付きビスの軸部と前記リフターとの間に、前記リフターの水平方向の移動を許容する隙間がある、第4態様に記載のディスク装置を提供する。
以下、本発明の実施形態について、図面を参照しながら説明する。なお、以下の全ての図において、同一又は相当部分には同一符号を付し、重複する説明は省略する。
《実施形態》
図1は、本発明の実施形態に係るディスク装置の概略構成を示す斜視図である。なお、本実施形態においては、図1の左下側を「装置前方」といい、図1の右上側を「装置後方」という。
まず、図1を用いて、本実施形態に係るディスク装置の全体構成について説明する。
本実施形態に係るディスク装置は、2つのマガジンストッカー1,1を備えている。2つのマガジンストッカー1,1は、底シャーシ11上において、装置幅方向Yに互いに対向するように設けられている。なお、図1では、一方(手前側)のマガジンストッカー1の図示を省略している。また、図1では、マガジンストッカー1の天板及び仕切板の図示を省略している。
各マガジンストッカー1には、複数のマガジン2が収納されている。各マガジン2は、複数枚(例えば、12枚)のディスクを収納するマガジントレイ21を有している。2つのマガジンストッカー1,1の間には、複数のマガジン2の中から選択された1つのマガジン2からマガジントレイ21を引き出し、当該マガジントレイ21を保持するピッカー3が設けられている。
ピッカー3は、当該保持したマガジントレイ21を、装置後方に配置された複数のディスクドライブ4の近傍まで搬送するように構成されている。ピッカー3には、マガジントレイ21から複数枚のディスクを押し出すリフター5が一体的に設けられている。
ディスクドライブ4は、ディスクに対して情報の記録又は再生を行う装置である。また、ディスクドライブ4は、トレイを用いてディスクをローディングするトレイ方式のディスクドライブである。複数のディスクドライブ4は、装置高さ方向Zに積層され、装置後方において各マガジンストッカー1,1に隣接して配置されている。一方のマガジンストッカー1に隣接して積層配置された複数のディスクドライブ4と、他方のマガジンストッカー1に隣接して積層配置された複数のディスクドライブ4との間には、キャリア6が設けられている。
キャリア6は、リフター5により押し出された複数枚のディスクを積層状態で保持し、任意のディスクドライブ4から排出されたトレイ4a(図23参照)の上方で、前記保持した複数枚のディスクから1枚のディスクを分離し、当該分離したディスクを前記トレイ4aに載置するように構成されている。
キャリア6及び複数のディスクドライブ4より更に装置後方には、電気回路及び電源7が設けられている。電気回路及び電源7には、ピッカー3、ディスクドライブ4、キャリア6などの各装置の動作(モータ等)を制御する制御部が設けられている。当該制御部は、例えば、データを管理するホストコンピュータに接続されている。ホストコンピュータは、オペレータの指示に基づき、指定のマガジン2へのデータの書き込み又は読み出し等の動作を行うように制御部に指令を送る。制御部は、当該指令に従い、ピッカー3、ディスクドライブ4、キャリア6などの各装置の動作を制御する。
次に、前述した各装置及び各部品の構成についてより詳しく説明する。
マガジンストッカー1は、ピッカー3を摺動自在にガイドするガイドレール12に沿って設けられている。ガイドレール12は、装置奥行き方向Xに(マガジンストッカー1の長手方向)に延在するように設けられている。マガジンストッカー1の装置前方側の側面には、把手13が設けられている。把手13を引くことにより、マガジンストッカー1を装置前方に移動させることができる。各マガジンストッカー1は、装置幅方向Yから見て格子状に形成された仕切板(図示せず)を備えている。当該仕切板に囲まれたそれぞれの空間にマガジン2が収納されている。
マガジン2は、図2Aに示すように、マガジントレイ21と、マガジントレイ21を収納する略直方体形状のケース22とを備えている。ケース22の前面(一側面)には、図2Bに示すように、マガジントレイ21を挿抜可能な開口部22aが設けられている。
マガジントレイ21は、外形が平面視において略矩形状に形成されている。マガジントレイ21は、複数枚のディスク100を互いに密着して積層した状態で収納する。マガジントレイ21がケース22内に収納された際にケース22の背面側に位置する両コーナー部分には、カット部21a,21aが形成されている。また、マガジントレイ21がケース22内に収納された際にケース22の背面側に位置する側面21bは、カット部21a,21aを含む全体が円弧状に形成されている。
マガジントレイ21がケース22内に収納された際にケース22の前面側に位置する両コーナー部分には、切欠部21c,21cが形成されている。マガジントレイ21の幅方向において、切欠部21c,21cの内側には、後述する一対のフック35,35が係合する係合凹部21d,21dが形成されている。
マガジントレイ21には、複数枚のディスク100のそれぞれに設けられた中心穴100aに挿入され、各ディスク100の面方向の移動を規制する芯棒23が設けられている。この芯棒23により、各ディスク100の面方向の移動による各ディスク100の傷付きが防止される。芯棒23には、後述するディスクチャックユニット62のスピンドルヘッド67bが係合する係合部23aが設けられている。
芯棒23の近傍には、後述するリフター5の昇降ピン52aが挿入される孔21eが少なくとも1つ以上設けられている。本実施形態では、3つの孔21eが120度間隔で設けられている。また、3つの孔21eは、ディスク100が芯棒23に挿入されたとき、当該ディスク100の内周部の非記録再生領域と対向する位置に設けられている。
ピッカー3は、走行ベース31を備えている。走行ベース31の一方のマガジンストッカー1側には、図3に示すように、ガイドレール12を摺動自在に移動する台車31aが取り付けられている。また、走行ベース31の他方のマガジンストッカー1側には、図4に示すように、ローラ31bが取り付けられている。
走行ベース31には、図3に示すように、ピッカー3を装置奥行き方向Xに移動させる駆動力を発生させるピッカーモータ31cが設けられている。ピッカーモータ31cの駆動軸に圧入されたモータギヤ31iには、減速ギヤ31dが噛み合っている。減速ギヤ31dは、ピニオンギヤ31eと噛み合っている。ピニオンギヤ31eは、ガイドレール12に隣接して装置奥行き方向Xに延在するように設けられたラック14と噛み合っている。
ピッカーモータ31cが駆動されると、ピッカーモータ31cの駆動力がモータギヤ31i、減速ギヤ31dを介してピニオンギヤ31eに伝達され、ピニオンギヤ31eが回転する。ここで、ラック14は、底シャーシ11に固定されている。一方、走行ベース31は、底シャーシ11に固定されていない。このため、ピニオンギヤ31eが回転すると、ピニオンギヤ31eがラック14に沿って移動し、ピッカー3が装置奥行き方向Xに移動する。
ピッカーモータ31cには、例えば、ステッピングモータが用いられる。当該ピッカーモータ31cに所定のパルスを与えることにより、ピッカー3を所定のマガジン2の前に移動させることができる。
板金で形成された走行ベース31には、樹脂で形成されたピッカーベース31hが取り付けられている。ピッカーベース31hには、回転台32が、装置高さ方向Zに延在する回転軸32aを略中心として回転可能に設けられている。また、ピッカーベース31hには、回転台32を回転させる駆動力を発生させる回転台モータ31fが設けられている。回転台モータ31fの駆動軸に圧入されたモータギヤ31jには、図4に示すように、減速ギヤ31gが噛み合っている。減速ギヤ31gは、回転台32の外周部に設けられた回転台ギヤ32bと噛み合っている。回転台モータ31fが駆動されると、回転台モータ31fの駆動力がモータギヤ31j、減速ギヤ31gを介して回転台ギヤ32bに伝達され、回転台32が回転する。
回転台32には、装置高さ方向Zに延在し且つ互いに対向するように一対の昇降レール33,33が設けられている。一対の昇降レール33,33の間には、昇降台34が設けられている。また、回転台32には、昇降台34を昇降させる駆動力を発生させる昇降台モータ32cが設けられている。
昇降台モータ32cの駆動軸に圧入されたモータギヤ32kには、図4に示すように、リレーギヤ32dが噛み合っている。リレーギヤ32dには、連結シャフトギヤ32eが噛み合っている。連結シャフトギヤ32eの中心部には、連結シャフト32fが貫通している。連結シャフト32fの両端部には、ウォーム32g,32gが固定されている。各ウォーム32gは、リレーギヤ32hと噛みっている。各リレーギヤ32hは、リードスクリューギヤ32iと噛み合っている。各リードスクリューギヤ32iは、リードスクリュー32jに固定されている。各リードスクリュー32jは、昇降レール33に沿って装置高さ方向Zに延在するように設けられている。各リードスクリュー32jには、図3に示すように、昇降台34に設けられたナット34aが螺合している。
昇降台モータ32cが駆動されると、昇降台モータ32cの駆動力が、モータギヤ32k、リレーギヤ32d、連結シャフトギヤ32e、連結シャフト32f、ウォーム32g、リレーギヤ32h、リードスクリューギヤ32iを介してリードスクリュー32jに伝達され、リードスクリュー32jが回転する。これにより、昇降台34が一対の昇降レール33,33に沿って装置高さ方向Zに昇降する。
昇降台34には、図8に示すように、マガジントレイ21の係合凹部21dに係合可能な一対のフック35,35と、一対のフック35,35の開閉動作を行う機構を有すると共に前後へ移動させるチャック36とが設けられている。
また、昇降台34には、図5に示すように、チャックモータ34bが設けられている。チャックモータ34bの駆動軸に圧入されたモータギヤ34fには、減速ギヤ34cが噛み合っている。減速ギヤ34cは、リードスクリューギヤ34dに噛み合っている。リードスクリューギヤ34dは、リードスクリュー34eに固定されている。リードスクリュー34eは、一対の昇降レール33,33を結ぶ直線に対して直交する方向に延在するように設けられている。リードスクリュー34eには、チャック36に固定されたナット36aが螺合している。
チャックモータ34bが駆動されると、チャックモータ34bの駆動力が、モータギヤ34f、減速キヤ34c、リードスクリューギヤ34d、リードスクリュー34eを介してナット36aに伝達され、チャック36がリードスクリュー34eに沿って移動する。
また、チャック36は、一対のフック35,35の間隔を調整可能に構成されている。チャック36が一対のフック35,35の間隔を縮めることにより、一対のフック35,35をマガジントレイ21の係合凹部21d,21dに係合させることができる。一方、チャック36が一対のフック35,35の間隔を拡げることにより、一対のフック35,35とマガジントレイ21の係合凹部21d,21dとの係合状態を解除することができる。
一対の昇降レール33は、U字状のアングル37の両側面に取り付けられている。一対のリードスクリュー32jの上端部は、アングル37の上面に回動自在に取り付けられている。
ピッカーモータ31c、回転台モータ31f、昇降台モータ32c、及びチャックモータ34bは、FFC(フレキシブルフラットケーブル)114(図1参照)を介して電気回路及び電源7の制御部と接続され、当該制御部により駆動を制御される。
図6〜図12は、ピッカー3がマガジントレイ21をケース22から引き出す様子を示している。走行ベース31が装置奥行き方向Xに走行するとともに、昇降台34が一対の昇降レール33に沿って装置高さ方向Zに昇降することにより、図6に示すように、複数のマガジン2の中から選択された1つのマガジン2の前方までピッカー3が移動される。また、図7に示すように、チャック36が当該マガジン2の正面に向くように、回転台32が回転される。
その後、図8に示すように、チャック36が、マガジントレイ21に向けて前進し、図9に示すように、一対のフック35,35をマガジントレイ21の係合凹部21d,21dに係合させる。この状態で、チャック36がケース22から後退することで、マガジントレイ21がケース22から引き出される。
図10に示すように、チャック36が後退する(ケース22の前方に移動する)ことにより、マガジントレイ21のカット部21aがケース22の開口部22aを通過した後、回転台32が回転軸32aを略中心として時計回りに回転される。言い換えれば、図11に示すように、マガジントレイ21の側面21bの頂点21f(回転軸32aからの距離が最も離れた位置)から回転軸32aまでの距離L1が、ケース22の側面の前端部22bから回転軸32aまでの距離L2よりも小さくなったとき、回転台32が回転軸32aを略中心として時計回りに回転される。この回転台32の回転に伴い、マガジントレイ21が図11及び図12に示すように回転軸32aを略中心として回転する。その結果、図12に示すように、マガジントレイ21がケース22から完全に引き出される。
図12に示すように、ケース22から引き出されたマガジントレイ21は、ピッカー3の走行ベース31が装置後方へ走行することにより、図13及び図14に示すように、複数のディスクドライブ4の近傍に搬送される。その後、図15に示すように、ピッカー3のチャック36が前進し、リフター5上部のマガジントレイガイド51上の所定の位置にマガジントレイ21が載置される。なお、図14及び図15では、手前側のディスクドライブ4の図示を省略している。同様に、後述する図21〜図28についても、手前側のディスクドライブ4の図示を省略している。
図16は、リフター5のマガジントレイガイド51を取り外した状態を示す分解斜視図であり、図17は、その組立斜視図である。
図16及び図17に示すように、リフター5は、昇降プレート52と、回転カム53と、駆動ギヤ54と、リレーギヤ55と、リフターモータ56とを備えている。
昇降プレート52は、棒状部材の一例である昇降ピン52aと、カムピン52bとを備えている。本実施形態では、3つの昇降ピン52aと3つのカムピン52bが、それぞれ120度間隔で設けられている。
3つの昇降ピン52aは、図15に示すように、マガジントレイガイド51上の所定の位置にマガジントレイ21が載置された際に、図2Bに示すようにマガジントレイ21に設けられた3つの孔21eと一致する位置に設けられている。また、図14に示すように、マガジントレイガイド51には、3つの昇降ピン52aに対応する位置に3つの孔51aが設けられている。3つのカムピン52bは、リフター5の本体に設けられた3つのスリット5aに係合される。各スリット5aは、装置高さ方向Zに延在するように設けられている。
回転カム53の内周面には、3つのカムピン52bの先端部が摺動する斜面を有する3つのカム溝53aが設けられている。回転カム53の外周面には、カムギヤ53bが設けられている。カムギヤ53bは、駆動ギヤ54と噛み合っている。駆動ギヤ54は、リレーギヤ55と噛み合っている。リレーギヤ55は、リフターモータ56の駆動軸に圧入されたモータギヤ(図示せず)と噛み合っている。
リフターモータ56が駆動されると、リフターモータ56の駆動力が、モータギヤ(図示せず)、リレーギヤ55を介して駆動ギヤ54に伝達され、駆動ギヤ54が回転する。これにより、駆動ギヤ54とカムギヤ53bで噛み合う回転カム53が回転する。回転カム53が回転されると、3つのスリット5aで回転を規制される3つのカムピン52bの先端部が3つのカム溝53aの斜面を摺動し、昇降プレート52が装置高さ方向Zに昇降する。リフターモータ56は、FFC14(図1参照)を介して電気回路及び電源7の制御部と接続され、当該制御部により駆動を制御される。
図17に示すように、昇降プレート52が上昇すると、3つの昇降ピン52aがマガジントレイガイド51の3つの孔51a及びマガジントレイ21の3つの孔21eを通じてマガジントレイ21内に侵入する。この3つの昇降ピン52aの上昇により、マガジントレイ21から複数枚のディスク100が押し出される。3つの昇降ピン52aにより押し出された複数枚のディスク100は、キャリア6に保持される。
キャリア6は、図18に示すように、複数台(例えば、12台)のディスクドライブ4を収容するハウジング8に設けられている。キャリア6は、装置高さ方向Zに移動する移動ベース61と、移動ベース61に設けられたディスクチャックユニット62とを備えている。
移動ベース61は、図19に示すように、ブッシュ61aを介してボールネジ91に接続されるとともに、ガイド軸受け61bを介してガイドシャフト92に接続されている。ボールネジ91及びガイドシャフト92は、装置高さ方向Zに延在するように設けられている。
ボールネジ91の上端部には、図18に示すように、プーリ91aが取り付けられている。また、ハウジング8には、ボールネジ91を軸回りに回転させる駆動力を発生させるキャリアモータ93が設けられている。キャリアモータ93の駆動軸には、プーリ93aが取り付けられている。プーリ91aとプーリ93aには、ベルト94が架け回されている。
キャリアモータ93が駆動されると、キャリアモータ93の駆動力が、プーリ93a、ベルト94、プーリ91aを介してボールネジ91に伝達され、ボールネジ91が軸回りに回転する。このボールネジ91の回転により、移動ベース61が、ボールネジ91及びガイドシャフト92にガイドされて装置高さ方向Zに移動する。キャリアモータ93は、電気回路及び電源7の制御部と接続され、当該制御部により駆動を制御される。
ディスクチャックユニット62は、リフター5により押し出された複数枚のディスク100を保持し、当該保持した複数枚のディスク100を1枚ずつ分離するように構成されている。ディスクチャックユニット62の詳細な構成については、後で詳しく説明する。
図15に示すようにリフター5の上部の所定の位置にマガジントレイ21が載置されると、図20に示すように、移動ベース61がマガジントレイ21の近傍まで下降される。これにより、ディスクチャックユニット62の先端部が、マガジントレイ21に設けられた芯棒23の係合部23a(図2B参照)に係合し、ディスクチャックユニット62と芯棒23とが同軸となる。この状態で、リフターモータ56が駆動されて、昇降プレート52が上昇する(図17参照)。
昇降プレート52が上昇すると、昇降ピン52aが、孔51a,21eを通じてマガジントレイ21内に侵入し、マガジントレイ21から複数枚のディスク100を押し出す。これにより、図21に示すように、ディスクチャックユニット62が複数枚のディスク100を保持する。
ディスクチャックユニット62が全てのディスク100を保持すると、移動ベース61が、ボールネジ91及びガイドシャフト92にガイドされて上昇する。これにより、ディスクチャックユニット62の先端部と芯棒23の係合部23a(図2B参照)との係合が解除される。その後、図22に示すように、ピッカー3が装置前方に移動して、マガジントレイ21がディスクドライブ4の近傍から退避される。その後、電気回路及び電源7の制御部の制御により、図23に示すように、ディスクドライブ4のトレイ4aが排出される。
その後、図24に示すように、ディスクチャックユニット62が保持する複数枚のディスク100がトレイ4aの上方(例えば、直上)に位置するように、移動ベース61が下降される。その後、ディスクチャックユニット62により、最下部のディスク100が他のディスクから分離され、トレイ4a上に載置される。図25は、最下部のディスク100がトレイ4a上に載置された状態を示す斜視図である。
最下部のディスク100がトレイ4a上に載置されると、ディスクチャックユニット62とトレイ4aとが接触しないように、移動ベース61が上昇される。その後、図26に示すように、トレイ4aがディスクドライブ4内に搬入される。この後又はこれと同時に、当該ディスクドライブと対向するディスクドライブ4のトレイ4aが排出される(図示せず)。その後、前記と同様にして、当該トレイ4aにディスク100が載置され、当該トレイ4aがディスクドライブ4内に搬入される。これにより、最下段(1段目)のディスクドライブ4へのローディング動作が完了する。このローディング動作を2段目以降も繰り返す。
図27は、最上段(例えば、6段目)のディスクドライブ4のトレイ4aにディスク100を載置する様子を示している。最上段のディスクドライブ4へのローディング動作が完了すると、全てのディスクドライブ4にディスク100が搬入され、各ディスクドライブ4のディスク100に対して記録又は再生可能となる。
なお、各ディスクドライブ4のディスク100の回収は、例えば、前記とは逆の順序で行えばよい。具体的には、以下の通りである。
まず、図27に示すように、最上段のディスクドライブ4のトレイ4aが排出される。
その後、当該トレイ4a上のディスク100の中心穴100aにディスクチャックユニット62が挿入され、ディスクチャックユニット62が当該ディスク100を保持する。
その後、ディスクチャックユニット62にディスク100を回収されたトレイ4aがディスクドライブ4内に搬入される。この後又はこれと同時に、当該ディスクドライブと対向するディスクドライブ4のトレイ4aが排出される(図示せず)。その後、前記と同様にして、当該トレイ4aのディスク100がディスクチャックユニット62に回収され、当該トレイ4aがディスクドライブ4内に搬入される。これにより、最上段(1段目)のディスクドライブ4のディスク回収動作が完了する。このディスク回収動作を最下段のディスクドライブ4内のディスク100を回収するまで繰り返す。
ディスクチャックユニット62が全てのディスク100を回収すると、移動ベース61が上昇される。その後、ピッカー3が装置後方に移動して、ディスクチャックユニット62の下方にマガジントレイ21がセットされる。
その後、移動ベース61が下降され、ディスクチャックユニット62の先端部が芯棒23の係合部23a(図2B参照)に係合し、ディスクチャックユニット62と芯棒23とが同軸となる。
その後、ディスクチャックユニット62に保持された全てのディスク100が、図28に示すように、マガジントレイ21内に押し出され、収納される。
その後、移動ベース61が上昇されて、ディスクチャックユニット62の先端部と芯棒23の係合部23aとの係合が解除される。
全てのディスク100を収納したマガジントレイ21は、ピッカー3によりマガジンストッカー1内に戻される。このマガジンストッカー1内へのマガジントレイ21の搬送は、例えば、図6〜図15を用いて説明した動作と逆の動作を行うことにより行われる。
次に、ディスクチャックユニット62の構成についてより詳細に説明する。
ディスクチャックユニット62は、図29及び図30に示すように、セパレータフック64A,64Bと、ボトムフック65A,65Bと、スピンドルユニット66と、カムシャフトユニット67とを備えている。
図31は、セパレータフック64A,64Bとボトムフック65A,65Bの拡大斜視図である。各フック64A〜65Bは、略レバーの形状に形成され、装置高さ方向Zに延在する回動軸64Aa〜65Ba及び駆動ピン64Ab〜65Bbと、装置高さ方向Zに対して交差する方向に突出する、内周支持部の一例である爪部64Ac〜65Bcとを備えている。
また、本実施形態において、ディスク100の内周部には、図32に示すように、凹部100bが設けられている。凹部100bは、ディスク100の内周部の上側角部を平面100baと斜面100bbを有するように切断した形状に形成されている。セパレータフック64A,64Bの爪部64Ac,64Bcの下面は、図31に示すように、外周側から内周側に向かうに従い下方向に厚さが厚くなるように斜面を有するように形成されている。また、各爪部64Ac〜65Bcの上面は、装置高さ方向Zに対して直交するように形成されている。
スピンドルユニット66は、図29及び図30に示すように、略円筒形状のスピンドルシャフト66aと、スピンドルシャフト66aの下方に設けられた略円錐台形状のスピンドルヘッド66bと、スピンドルシャフト66aの上端部に設けられたフランジ66cとを備えている。
スピンドルユニット66は、フランジ66cが移動プレート61に直接又は間接的に取り付けられることにより、移動ベース61と一体的に移動する。スピンドルシャフト66aの直径は、ディスク100の中心穴100aの直径よりも小さく設定されている。例えば、スピンドルシャフト66aの直径は14.5mmであり、ディスク100の中心穴100aの直径は15mmである。
スピンドルヘッド66bは、図33に示すように、スピンドルシャフト66aの下端部にネジ66dにより固定される。スピンドルヘッド66bとスピンドルシャフト66aとの間には、4つの開口部66eが形成されている。これらの開口部66eを通じて各フック64A〜65Bの爪部64Ac〜65Bcが進退移動可能に構成されている。
スピンドルヘッド66bには、図34に示すように、4つの回動軸穴66baが設けられている。また、スピンドルシャフト66aには、図33に示すように、回動軸穴66baと対向する位置に回動軸穴66aaが設けられている。各フック64A〜65Bは、それぞれ対応する回動軸穴66aa,66baに回動軸64Aa〜65Baが挿入されることにより、回動自在に保持される。また、各フック64A〜65Bは、セパレータフック64A,64Bの爪部64Ac,64Bcの上面がボトムフック65A,65Bの爪部65Ac,65Bcの上面よりも略ディスク1枚分、上方に位置するようにそれぞれ保持される。さらに、セパレータフック64Aとセパレータフック64Bとは、スピンドルユニット66の周方向に180度位相をずらした位置で保持され、ボトムフック65Aとボトムフック65Bとは、スピンドルユニット66の周方向に180度位相をずらした位置で保持される。
カムシャフトユニット67は、図35に示すように、略円筒状のカムシャフト67aと、カムシャフト67aの上端部に設けられたカムギヤ67bと、カムシャフト67aの下端部に設けられたカムプレート68A,68Bとを備えている。
カムギヤ67bの中心部には、回動軸穴67baが設けられている。回動軸穴67baには、移動ベース61に設けられた回動軸(図示せず)が挿入される。カムギヤ67bは、図18に示すように、リレーギヤ70と噛み合っている。リレーギヤ70は、例えば2つのギヤで構成され、移動ベース61に回動自在に設けられている。また、リレーギヤ70は、図18又は図19に示すように、移動ベース61に設けられたディスクチャックモータ71の駆動軸に圧入されたモータギヤ71aと噛み合っている。
ディスクチャックモータ71が駆動されると、ディスクチャックモータ71の駆動力が、モータギヤ71a、リレーギヤ70、カムギヤ67bを介してカムシャフト67aに伝達され、カムシャフト67aが回動する。ディスクチャックモータ71は、電気回路及び電源7の制御部と接続され、当該制御部により駆動を制御される。
カムシャフト67aの下端部には、図35に示すように、カムプレート68Aと係合する係合部67aaと、カムプレート68Bと係合する係合部67abとが設けられている。係合部67aa,67abは、それぞれ断面D形状に形成されている。
カムプレート68Aの中央部には、D形状の回動軸穴68Aaが設けられている。カムプレート68Aは、回動軸穴68Aaにカムシャフト67aの係合部67aaが係合することで、カムシャフト67aと一体的に回動可能に構成されている。
カムプレート68Bの上面中央部には、D形状の回動軸穴68Baが設けられている。カムプレート68Bは、回動軸穴68Baにカムシャフト67aの係合部67abが係合することで、カムシャフト67aと一体的に回動可能に構成されている。
また、カムプレート68Bの下面中央部には、回動軸68Bbが設けられている。回動軸68Bbは、図29に示すようにスピンドルシャフト66aの下端部に設けられた回動軸受け66abに挿入される。
カムプレート68Aの上面には、カムシャフト67aが回動する際、セパレータフック64Aの駆動ピン64Abが摺動するカム溝68Ab(図35参照)が設けられている。図37A〜図37Dは、セパレータフック64Aの駆動ピン64Abがカム溝68Abを摺動する様子を示している。
カムプレート68Aの下面には、カムシャフト67aが回動する際、セパレータフック64Bの駆動ピン64Bbが摺動するカム溝68Ac(図36参照)が設けられている。図38A〜図38Dは、セパレータフック64Bの駆動ピン64Bbがカム溝68Acを摺動する様子を示している。カム溝68Acは、カム溝68Abと鏡面対称の形状を有し、スピンドルユニット66の周方向に180度位相をずらした位置に設けられている。
カムプレート68Bの上面には、カムシャフト67aが回動する際、ボトムフック65Bの駆動ピン65Bbが摺動するカム溝68Bc(図35参照)が設けられている。図39A〜図39Dは、ボトムフック65Bの駆動ピン65Bbがカム溝68Bcを摺動する様子を示している。
カムプレート68Bの下面には、カムシャフト67aが回動する際、ボトムフック65Aの駆動ピン65Abが摺動するカム溝68Bd(図36参照)が設けられている。図40A〜図40Dは、ボトムフック65Aの駆動ピン65Abがカム溝68Bdを摺動する様子を示している。カム溝68Bdは、カム溝68Bcと鏡面対称の形状を有し、スピンドルユニット66の周方向に180度位相をずらした位置に設けられている。
図41A〜図41Dは、カムシャフト67aと4つのフック64A〜65Bとの位置関係に着目して示す図である。
セパレータフック64Aとセパレータフック64Bとは、カムシャフト67aの回動に伴い、それらの爪部64Ac,64Bcが、スピンドルシャフト66aの内側の位置(図41A及び図41B参照)と、スピンドルシャフト66aの外側の位置(図41C参照)と、スピンドルシャフト66aの更に外側の位置(図41D参照)に位置するように移動する。なお、セパレータフック64A,64Bには、回動範囲を規制するためにストッパー64Ad,64Bdが設けられている。
以下、全てのフック64A〜65Bがスピンドルシャフト66aの内側に位置する図41Aに示す位置を収納位置という。また、ボトムフック65A,65Bのみがスピンドルシャフト66aの外側に位置する図41Bに示す位置を支持位置という。また、全てのフック64A〜65Bがスピンドルシャフト66aの外側に位置する図41Cに示す位置を切換位置という。また、セパレータフック64A,64Bがスピンドルシャフト66aの更に外側に位置し、ボトムフック65A,65Bがスピンドルシャフト66aの内側に位置する図41Dに示す位置を分離位置という。
次に、図42〜図50を用いて、キャリア6が複数枚のディスクから1枚のディスクを分離して、当該分離したディスクをディスクドライブ4のトレイ4aに載置する動作について説明する。なお、図42〜図50では、説明の便宜上、セパレータフック64A,64Bの爪部64Ac,64Adとボトムフック65A,65Bの爪部65Ac,65Bcとが同一断面上にあるものとして図示している。また、ここでは、昇降ピン52aが複数枚のディスク100をマガジントレイ21から押し出した状態から説明を開始する。
昇降ピン52aが複数枚のディスク100を押し出すと、図42に示すように、複数枚のディスク100の中心穴100aにスピンドルユニット66が挿入される。このとき、各フック64A〜65Bは、収納位置(図41A参照)に位置する。
図43に示すように、ボトムフック65A,65Bの爪部65Ac,65Bcが複数枚のディスクのうち最下部に位置するディスクより下方に位置するまで昇降ピン52aが複数枚のディスク100を押し出すと、ディスクチャックモータ71(図19参照)が駆動され、カムシャフト67aが軸回りに正方向に回転する。これにより、図44に示すように、各フック64A〜65Bが収納位置(図41A参照)から支持位置(図41B参照)に移動する。
その後、移動ベース61が上昇され、図45に示すように、ボトムフック65A,65Bの爪部65Ac,65Bcの上面が最下部のディスク100の内周部に接触して全てのディスク100を支持する。また、このとき、スピンドルヘッド66bと芯棒23の係合部23a(図2B参照)との係合が解除される。
その後、ディスクチャックモータ71(図19参照)が更に駆動され、カムシャフト67aが更に正方向に回転する。これにより、各フック64A〜65Bが、支持位置(図41B参照)から切換位置(図41C参照)に移動し、図46に示すように、セパレータフック64A,64Bの爪部64Ac,64Bcが、最下部のディスク100の凹部100bに挿入される。
その後、ピッカー3が装置前方に移動して、マガジントレイ21がディスクドライブ4の近傍から退避される(図22参照)。その後、ディスクドライブ4のトレイ4aが排出される(図23参照)。
その後、スピンドルユニット66に保持された複数枚のディスク100がトレイ4aの上方(例えば、直上)に位置するように、移動ベース61が下降される。この状態で、ディスクチャックモータ71が更に駆動され、カムシャフト67aが更に正方向に回転する。これにより、各フック64A〜65Bが、切換位置(図41C参照)から分離位置(図41D参照)に移動し、図47に示すように、ボトムフック65A,65Bの爪部65Ac,65Bcが、スピンドルシャフト66aの内側の位置に移動する。その結果、図48に示すように、最下部のディスク100が、自重により落下し、トレイ4a上に載置される。また、このとき、セパレータフック64A,64Bの爪部64Ac,64Bcの下面に形成された斜面が、最下部のディスク100を下方に押圧し、当該ディスク100が自重で落下するのを補助するように機能する。また、このとき、セパレータフック64A,64Bがスピンドルシャフト66aの更に外側へと突出し、セパレータフック64A,64Bの爪部64Ac,64Bcの上面が、残りのディスクのうちの最下部のディスク100の内周部に接触して残りのディスク100を支持する。
最下部のディスク100がトレイ4a上に載置されると、スピンドルユニット66とトレイ4aとが接触しないように、移動ベース61が上昇される。その後、トレイ4aがディスクドライブ4内に搬入される。この後又はこれと同時に、当該ディスクドライブと対向するディスクドライブ4のトレイ4aが排出される(図示せず)。
その後、ディスクチャックモータ71が逆駆動され、カムシャフト67aが逆方向に回転する。これにより、各フック64A〜65Bが、分離位置(図41D参照)から切換位置(図41C参照)に移動し、図49に示すように、ボトムフック65A,65Bの爪部65Ac,65Bcが、スピンドルシャフト66aの外側の位置に移動する。
その後、ディスクチャックモータ71が更に逆駆動され、カムシャフト67aが更に逆方向に回転する。これにより、各フック64A〜65Bが、切換位置(図41C参照)から支持位置(図41B参照)に移動し、図50に示すように、セパレータ64A,64Bの爪部64Ac,64Bcが、スピンドルシャフト66aの内側の位置に移動する。その結果、セパレータフック64A,64Bの爪部64Ac,64Bcの上面で支持されていた残りのディスク100が、自重により落下し、ボトムフック65A,65Bの爪部65Ac,65Bcの上面で支持される。
その後、ディスクチャックモータ71が駆動され、カムシャフト67aが正方向に回転する。これにより、各フック64A〜65Bが、支持位置(図41B参照)から切換位置(図41C参照)に移動し、図46に示すように、セパレータフック64A,64Bの爪部64Ac,64Bcが、最下部のディスク100の凹部100bに挿入される。
その後、スピンドルユニット66に保持された複数枚のディスク100が前記排出されたトレイ4aの上方(例えば、直上)に位置するように、移動ベース61が下降される。この状態で、ディスクチャックモータ71が更に駆動され、カムシャフト67aが更に正方向に回転する。これにより、各フック64A〜65Bが、切換位置(図41C参照)から分離位置(図41D参照)に移動し、図47に示すように、ボトムフック65A,65Bの爪部65Ac,65Bcが、スピンドルシャフト66aの内側の位置に移動する。その結果、図48に示すように、最下部のディスク100が、自重により落下し、トレイ4a上に載置される。また、このとき、セパレータフック64A,64Bがスピンドルシャフト66aの更に外側へと突出し、セパレータフック64A,64Bの爪部64Ac,64Bcの下面に形成された斜面が、最下部のディスク100を下方向に押圧し、当該ディスク100が自重で落下するのを補助するように機能する。また、このとき、セパレータフック64A,64Bの爪部64Ac,64Bcの上面が、残りのディスクのうち最下部のディスクの内周部に接触して残りのディスク100を支持する。
最下部のディスク100がトレイ4a上に載置されると、スピンドルユニット66とトレイ4aとが接触しないように、移動ベース61が上昇される。その後、トレイ4aがディスクドライブ4内に搬入される。これにより、最下段(1段目)のディスクドライブ4へのローディング動作が完了する。このローディング動作を2段目以降も繰り返す。
最上段のディスクドライブ4へのローディング動作が完了すると、全てのディスクドライブ4にディスク100が搬入され、各ディスクドライブ4のディスク100に対して記録又は再生可能となる。
次に、キャリア6が各ディスクドライブ4からディスク100を回収する動作について説明する。
まず、最上段のディスクドライブ4のトレイ4aが排出される。
その後、移動ベース61が下降され、当該トレイ4a上のディスク100の中心穴100aにスピンドルユニット66が挿入される。このとき、各フック64A〜65Bは、収納位置(図41A参照)にある。
ディスク100がボトムフック65A,65Bの上方に位置するまで、移動ベース61が下降すると、ディスクチャックモータ71(図19参照)が駆動され、カムシャフト67aが正方向に回転する。これにより、各フック64A〜65Bが収納位置(図41A参照)から支持位置(図41B参照)に移動する。
その後、移動ベース61が上昇され、ボトムフック65A,65Bの爪部65Ac,65Bcの上面がディスク100の内周部に接触して当該ディスク100を保持する。これにより、トレイ4a上のディスク100が回収される。
その後、ディスク100が回収されたトレイ4aがディスクドライブ4内に搬入される。この後又はこれと同時に、当該ディスクドライブ4と対向するディスクドライブ4のトレイ4aが排出される。
その後、スピンドルユニット66に保持されたディスクが前記排出されたトレイ4a上のディスク100の上方(例えば、直上)に位置するように、移動ベース61が下降される。
その後、ディスクチャックモータ71(図19参照)が逆駆動され、カムシャフト67aが逆方向に回転する。これにより、各フック64A〜65Bが支持位置(図41B参照)から収納位置(図41A参照)に移動する。これにより、スピンドルユニット66に保持されたディスク100が自重により落下し、前記排出されたトレイ4a上のディスク100の上に積層される。
その後、移動ベース61が下降され、前記排出されたトレイ4a上の2枚のディスク100の中心穴100aにスピンドルユニット66が挿入される。
2枚のディスク100がボトムフック65A,65Bの上方に位置するまで、移動ベース61が下降すると、ディスクチャックモータ71(図19参照)が駆動され、カムシャフト67aが正方向に回転する。これにより、各フック64A〜65Bが収納位置(図41A参照)から支持位置(図41B参照)に移動する。
その後、移動ベース61が上昇され、ボトムフック65A,65Bの爪部65Ac,65Bcの上面が最下部のディスク100の内周部に接触して全てのディスク100を支持する。
その後、ディスク100が回収されたトレイ4aがディスクドライブ4内に搬入される。これにより、最上段(1段目)のディスクドライブ4のディスク回収動作が完了する。このディスク回収動作を最下段のディスクドライブ4内のディスク100を回収するまで繰り返す。
スピンドルユニット66が全てのディスク100を回収すると、移動ベース61が上昇される。その後、ピッカー3が装置後方に移動して、スピンドルユニット66の下方にマガジントレイ21がセットされる。
その後、移動ベース61が下降され、スピンドルヘッド66b(図33参照)が芯棒23の係合部23a(図2B参照)に係合し、スピンドルヘッド66bと芯棒23とが同軸となる。
その後、ディスクチャックモータ71(図19参照)が逆駆動され、カムシャフト67aが逆方向に回転する。これにより、各フック64A〜65Bが支持位置(図41B参照)から収納位置(図41A参照)に移動する。これにより、スピンドルユニット66に保持された全てのディスク100が、スピンドルヘッド66b及び芯棒23に沿って、自重により落下し、マガジントレイ21内に収納される。
次に、リフター5の構成についてより詳しく説明する。
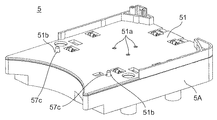
図51は、リフター5の分解斜視図である。図52Aは、リフター5の斜視図であり、図52Bは、リフター5のマガジントレイガイド51を取り外した状態を示す分解斜視図である。
リフター5は、リフター5の本体となるリフターベース5Aを備えている。このリフターベース5Aに、上述した、マガジントレイガイド51と、昇降プレート52と、回転カム53と、駆動ギヤ54と、リレーギヤ55と、リフターモータ56とが設けられている。また、リフターベース5Aには、さらに、位置決めベース57と、位置決めカムギヤ58と、サポートカム59と、リンクギヤ80と、減速ギヤ81と、モータアングル82とが設けられている。
位置決めベース57には、水平方向に突出する3つのカムピン57a,57a,57bが設けられている。3つのカムピンのうちの2つのカムピン57aは、略環状の位置決めカムギヤ58の外周面に形成された2つのカム溝58aに係合するように設けられている。3つのカムピンのうちの残りの1つのカムピン57bは、サポートカム59に設けられたカム溝59aと係合するように設けられている。
位置決めカムギヤ58には、外周下部の一部の領域に下部ギヤ部58bが設けられている。下部ギヤ部58bは、リンクギヤ80と噛み合っている。リンクギヤ80は、サポートカム59に設けられたラック部59bと噛み合っている。
位置決めカムギヤ58が回転されると、当該位置決めカムギヤ58の回転力が下部ギヤ部58b、リンクギヤ80を介してラック部59bに伝達され、サポートカム59が水平方向に移動する。このとき、2つのカムピン57aが2つのカム溝58aの斜面を摺動するとともに、カムピン57bがカム溝59aの斜面を摺動し、位置決めベース57が装置高さ方向Zに昇降する。
位置決めベース57には、上方に突出するように2つの位置決めピン57cが設けられている。2つの位置決めピン57cは、図51に示すようにマガジンガイドトレイ51に設けられた2つの穴51bと一致する位置に設けられている。また、2つの位置決めピン57cは、図15に示すように、マガジントレイガイド51上の所定の位置にマガジントレイ21が載置された際に、図55に示すようにマガジントレイ21に設けられた2つの穴21gと一致する位置に設けられている。2つの穴21gは、丸穴と長穴とで構成されている。図54A及び図54Bに示すように、位置決めベース57が上昇されるとき、各位置決めピン57cは、マガジンガイドトレイ51の穴51bを貫通して、マガジントレイ21の穴21gに係合する。これにより、マガジントレイ21が図15に示す所定の位置で固定される。
また、位置決めカムギヤ58には、外周上部の一部の領域に上部ギヤ部58cが設けられている。位置決めカムギヤ58の上部ギヤ部58cは、駆動ギヤ54の外周中部に設けられた中部ギヤ部54aと噛み合っている。駆動ギヤ54の外周下部に設けられた下部ギヤ部54cは、減速ギヤ81と噛み合っている。減速ギヤ81は、リレーギヤ55と噛み合っている。リレーギヤ55は、リフターモータ56の駆動軸に圧入されたモータギヤ56aと噛み合っている。リフターモータ56は、モータアングル82を介してリフターベース5Aに固定されている。
リフターモータ56が駆動されると、リフターモータ56の駆動力が、モータギヤ56a、リレーギヤ55、減速ギヤ81を介して駆動ギヤ54に伝達され、駆動ギヤ54が回転する。これにより、駆動ギヤ54の中部ギヤ部54aと上部ギヤ部58cで噛み合う位置決めカムギヤ58が回転され、位置決めベース57が装置高さ方向Zに昇降する。
また、駆動ギヤ54の外周上部には、上部ギヤ部54bが設けられている。駆動ギヤ54の上部ギヤ部54bは、図53A及び図53Bに示すように位置決めベース57が上昇した後、回転カム53のカムギヤ53bと噛み合うように設けられている。図53A及び図53Bに示す状態から駆動ギヤ54が正方向に回転すると、位置決めカムギヤ58が回転され、図54A及び図54Bに示すように昇降プレート52が上昇する。
昇降プレート52が上昇すると、3つの昇降ピン52aがマガジントレイガイド51の3つの孔51a及びマガジントレイ21の3つの孔21eを通じてマガジントレイ21内に侵入する。この3つの昇降ピン52aの上昇により、マガジントレイ21から複数枚のディスク100が押し出される。
一方、図54A及び図54Bに示す状態から駆動ギヤ54が逆方向に回転すると、位置決めカムギヤ58が逆回転され、図53A及び図53Bに示すように、昇降プレート52が下降する。図53A及び図53Bに示す状態から駆動ギヤ54が更に逆方向に回転すると、位置決めカムギヤ58が逆回転され、図52A及び図52Bに示すように、位置決めベース57が下降する。
次に、リフター5のピッカー3への取り付け構造についてより詳しく説明する。
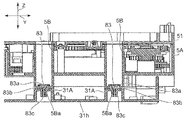
図56は、リフター5のピッカー3への取り付け構造を示す分解斜視図であり、図57は、その組立斜視図であり、図58は、その平面図である。図59は、図58のA−A線断面図であり、図60は、図58のB−B線断面図である。
図56に示すように、リフター5には、例えば3箇所に、取付凹部5Bが設けられている。また、ピッカーベース31hには、取付凹部5Bと対応する位置に取付凸部31Aが設けられている。
リフター5は、図59及び図60に示すように、各取り付け凹部5Bの底部と各取り付け凸部31Aの上部とを接触させた状態で、取り付け凹部5Bの底部を通じて取り付け凸部31Aの上部に段付きビス83がねじ込まれることにより、ピッカーベース31hに取り付けられる。
段付きビス83は、ヘッド部83aと、軸部83bと、ねじ部83cとを備えている。図59及ぶ図60に示すようにピッカーベース31hにリフター5を取り付けた状態において、段付きビス83のヘッド部83aは、軸部83bにより一定高さで固定されるため、取り付け凹部5Bの底部の上面と略接触し、リフター5の上方向の移動のみを規制し水平方向に移動自在に固定する。また、段付きビス83の軸部83bは、取り付け凹部5Bの底部に設けられた、軸部83bよりも直径が大きい貫通穴5Ba内に位置している。また、段付きビス83のねじ部83cは、取り付け凸部31Aの上部にねじ込まれている。
段付きビス83の軸部83bと貫通穴5Baとの間に隙間(いわゆる、遊び)があることにより、リフター5は、ピッカーベース31hに対して水平方向に相対移動可能となるように自由度を持って取り付けられている。言い換えれば、リフター5は、ピッカーベース31hにフローティング支持されている。
次に、リフター5がマガジントレイ21内の複数枚のディスク100をキャリア6に受け渡す動作について、より詳しく説明する。
ここでは、図61に示すように、リフター5の上部の所定の位置にマガジントレイ21が載置された状態から説明を開始する。また、マガジントレイ21が移動ベース61の真下からずれて位置するものとする。
リフター5の上部の所定の位置にマガジントレイ21が載置されると、図53A及び図54Aに示すように位置決めベース57が上昇され、2つの位置決めピン57cがマガジンガイドトレイ51の穴51bを通過して、マガジントレイ21の穴21gに係合する。これにより、マガジントレイ21がリフター5の上部の所定の位置で固定され、マガジントレイ21の水平方向の移動が規制される。
次いで、移動ベース61がマガジントレイ21の近傍まで下降される。これにより、ディスクチャックユニット62の先端部であるスピンドルヘッド66bが、マガジントレイ21内の最上部のディスク100の中心穴100aに向けて移動される。このとき、マガジントレイ21が移動ベース61の真下からずれて位置するので、スピンドルヘッド66bのテーパ状の部分が、最上部のディスク100の中心穴100aの周辺部に接触し、当該最上部のディスク100に対して水平方向に押圧力を加える。
前記押圧力は、最上部のディスク100を収納するマガジントレイ21を通じてリフター5にも伝達される。前述したように、リフター5は、ピッカーベース31hに対して水平方向に相対移動可能となるように自由度を持って取り付けられているので、前記押圧力により、マガジントレイ21と一体的に水平方向に移動する。これにより、スピンドルヘッド66bが最上部のディスク100の中心穴100aを通過することができるように、当該中心穴100aの位置とスピンドルヘッド66bの位置が調整される。
この状態で更に移動ベース61が下降されると、スピンドルヘッド66bがマガジントレイ21に設けられた芯棒23の係合部23a(図2B参照)に係合し、ディスクチャックユニット62と芯棒23とが同軸となる。図62は、ディスクチャックユニット62と芯棒23とが同軸となった状態を示している。
図62に示す状態でリフターモータ56が更に駆動されると、図54A及び図54Bに示すように昇降プレート52が上昇する。これにより、昇降ピン52aが、孔51a,21eを通じてマガジントレイ21内に侵入し、図63に示すようにマガジントレイ21から複数枚のディスク100を押し出す。複数枚のディスク100が図42に示す位置まで上昇されると、ディスクチャックユニット62の各フック64A〜65Bが収納位置(図41A参照)から支持位置(図41B参照)に移動する。これにより、複数枚のディスク100がディスクチャックユニット62に保持される。
その後、移動ベース61が、ボールネジ91及びガイドシャフト92にガイドされて上昇する。これにより、図64に示すように、ディスクチャックユニット62の先端部と芯棒23の係合部23a(図2B参照)との係合が解除され、リフター5がマガジントレイ21内の複数枚のディスク100をキャリア6に受け渡す動作が完了する。
本実施形態に係るディスク装置によれば、リフター5がピッカー3に対して水平方向に相対移動可能となるように自由度を持って取り付けられているので、マガジントレイ21が移動ベース61の真下からずれて位置し、ディスクチャックユニット62がマガジントレイ21内のディスクと接触して当該ディスクを水平方向に押圧したときに、当該ディスクと一体的にリフター5が移動することができる。これにより、マガジントレイ21の位置を移動ベース61の真下に位置するように調整することができ、マガジントレイ21内の複数枚のディスク100をディスクチャックユニット62に適切に受け渡すことができる。
なお、本発明は前記実施形態に限定されるものではなく、その他種々の態様で実施できる。例えば、前記では、段付きビス83によりリフター5をピッカーベース31hに取り付けたが、本発明はこれに限定されない。例えば、図56、図57に示すように、ピッカーベース31hに設けられたフック31Bがリフターベース5Aの上方向の移動を規制し、ピッカーベース31hの取り付け凸部31Cの上に設けられた軸31Dと、リフター5に設けられた軸31Dよりも直径が大きい貫通孔5Cにより、水平方向に自由度を持って取り付けてもよい。水平方向に相対移動可能となるように自由度を持って取り付けることができるものであれば、特に限定されることなく用いることができる。
また、前記では、スピンドルヘッド66bのテーパ状の部分が、最上部のディスク100の中心穴100aの周辺部に接触し、当該最上部のディスク100に対して水平方向に押圧力を加えることで、リフター5とマガジン21とが一体的に水平方向に移動するようにしたが、本発明はこれに限定されない。例えば、マガジントレイ21に設けられた芯棒23の係合部23a(2B参照)が、スピンドルヘッド66bと係合することでマガジントレイ21に対して直接水平方向に押圧力を加え、リフター5とマガジン21とが一体的に水平方向に移動するようにしてもよい。
また、スピンドルヘッド66bが移動ベース61の真下からずれる距離が大きい場合に、スピンドルヘッド66bにより最上部のディスク100を水平方向に押圧するようにすると、スピンドルヘッド66bにかかる負荷が大きくなる。また、スピンドルヘッド66bと最上部のディスク100とが接触することにより、両者が摩耗するおそれがある。このため、スピンドルヘッド66bの先端部が最上部のディスク100の中心穴100aの周辺部に接触する前に、マガジントレイ21がキャリア6の略真下に位置するようにあらかじめ位置決めする位置決め機構を更に備えることが好ましい。これにより、スピンドルヘッド66bにかかる負荷を抑えるとともに、スピンドルヘッド66bと最上部のディスク100とが摩耗することを抑えることができる。
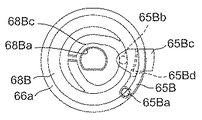
このような位置決め機構は、例えば、図65に示すように、キャリア6の移動ベース61に設けられた2つの位置決めピン61d,61dと、リフターに設けられた2つの位置決め孔84,84とにより構成することができる。この構成によれば、スピンドルヘッド66bの先端部が最上部のディスク100の中心穴100aの周辺部に接触する前に、2つの位置決めピン61d,61dを2つの位置決め孔84,84に挿入することで、マガジントレイ21がキャリア6の略真下に位置するようにあらかじめ位置決めすることができる。
また、位置決め機構は、図66又は図67に示すように、キャリア6の移動ベース61に設けられた位置決めピン61dと、リフター5に設けられた位置決め孔84及び位置決め凸部85と、ハウジング8に設けられた位置決め凹部86とにより構成することもできる。この構成によれば、図68に示すように、位置決め凸部85を位置決め凹部86に挿入することで、Y方向の位置決めを行うことができる。その後、図69及び図70に示すように、スピンドルヘッド66bの先端部が最上部のディスク100の中心穴100aの周辺部に接触する前に、位置決めピン61dを位置決め孔84に挿入することで、X方向の位置決めをすることができる。これにより、マガジントレイ21がキャリア6の略真下に位置するようにあらかじめ位置決めすることができる。
なお、「マガジントレイ21がキャリア6の真下に位置する」とは、スピンドルヘッド66bが、最上部のディスク100の中心穴100aの周辺部に接触することなく、当該中心穴100aに挿入可能な位置をいう。また、「マガジントレイ21がキャリア6の略真下に位置する」とは、スピンドルヘッド66bが最上部のディスク100の中心穴100aに挿入可能な位置、あるいは、スピンドルヘッド66bのテーパ状の部分が最上部のディスク100の中心穴100aの周辺部に接触するが、その接触量が小さい位置をいう。なお、位置決めピン61d、位置決め孔84、位置決め凸部85、及び位置決め凹部86のそれぞれの先端部が、位置決めしやすいようにテーパ状に形成されることが好ましいことは言うまでもない。
本発明は、添付図面を参照しながら好ましい実施の形態に関連して充分に記載されているが、この技術に熟練した人々にとっては種々の変形や修正は明白である。そのような変形や修正は、添付した請求の範囲による本発明の範囲から外れない限りにおいて、その中に含まれると理解されるべきである。