JP5949366B2 - 道路交通管制方法、道路交通管制システムおよび車載端末 - Google Patents
道路交通管制方法、道路交通管制システムおよび車載端末 Download PDFInfo
- Publication number
- JP5949366B2 JP5949366B2 JP2012201664A JP2012201664A JP5949366B2 JP 5949366 B2 JP5949366 B2 JP 5949366B2 JP 2012201664 A JP2012201664 A JP 2012201664A JP 2012201664 A JP2012201664 A JP 2012201664A JP 5949366 B2 JP5949366 B2 JP 5949366B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- intersection
- vehicles
- traffic
- group
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Traffic Control Systems (AREA)
Description
交差点に設置された信号機の異常を検知するステップと、
異常が検知された信号機の設置されている交差点に接近した際に、車両を停止させるか停止を促す制御を行うステップと、
車車間通信により交差点に対して同一の進入方向から進入する車群の車両台数を検出するステップと、
各車群の車両台数に基づいて、各車群の交差点への進入の優先度を決定するステップと、
前記優先度にしたがって、交差点への進入を行うステップと、
を含む。
の方法であっても構わない。
車両の交差点への進入を停止したり、運転者に対して交差点への進入を停止するように促すことが好ましい。
本実施形態は、信号機が機能停止した交差点において、車両間で通信を行って自律的に交差点の進入タイミングの判断を行い、信号機の指示がない場合でも安全に交通管制を行う道路交通管制システムである。以下、図面を参照しながら本実施形態にかかる道路交通管制システムについて説明する。
うことにより、各進入路の車群の大きさを判断し、それに基づいて優先度を決定する。そして、全ての進入方向から車両の通行が終了したら、次の車群は全て一旦停止する。そして、ハザードランプを点滅させて、歩行者の通行を促す。以下、この処理が繰り返されて、交差点における安全な交通が実現される。
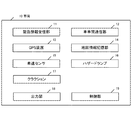
図1は、本実施形態にかかる道路交通管制システムを構成する車両が有する車載端末の機能ブロックを示した図である。車両は、緊急情報受信部11、車車間通信部12、GPS装置13、地図情報記憶部14、車速センサ15、ハザードランプ16、クラクション17、出力部18、制御部19などを含む。車両はここで示した以外の、一般の車両が有するその他の機能部も有する。車載端末は、演算処理装置、主記憶装置、補助記憶装置、通信インタフェース、入出力装置などを含むコンピュータであり、演算処理装置がメモリに格納されたプログラムを実行することによって、緊急情報受信部11、車車間通信部12、制御部19などの各機能部が実現される。
りハザードランプを点滅させたりする制御は行う。ただし、別の実施形態では、制御部19は、運転者に対して車両の停止や走行を促す制御を行う代わりに、自動的に車両を停止させたり走行させたりする制御を行っても構わない。
以下、図4〜7のフローチャートを参照して、本実施形態にかかる道路交通管制システムにおける各車両が行う処理の流れについて説明する。
6)。優先度順に車群を通行させるための制御については、後述する。
本実施形態にかかる道路交通管制システムによれば、信号機からの交通指示が無くても、車両間で通信を行って自律的に交通管制を行うことができる。したがって、信号機が故障などにより機能停止した場合であっても、交差点を安全に通行することができる。
上記の説明では、車載端末は車両のブレーキ操作やアクセル操作などを自動的に行わず、車両の停止や通行を運転者に促すだけである。しかしながら、車載端末が積極的に運転に介入し、車両を停止させたり、走行を開始させたりするように制御しても構わない。
構わない。例えば、車群を構成する車両台数を検出する処理では、リーダ車両等からメッセージを送信し、これに対して応答を返した車両数を数えることで、車群の車両台数を検出することができる。
11 緊急情報受信部
12 車車間通信部
13 GPS装置
14 地図情報記憶部
18 出力部
19 制御部
Claims (10)
- 車車間通信を用いて交差点において車両間で自律的に交通管制を行う道路交通管制方法であって、
交差点に設置された信号機の異常を検知するステップと、
異常が検知された信号機の設置されている交差点に接近した際に、車両を停止させるか停止を促す制御を行うステップと、
交差点内の車両からリーダ車両を決定するステップと、
車車間通信により交差点に対して同一の進入方向から進入する車群の車両台数を検出するステップと、
前記リーダ車両が、各車群の車両台数に基づいて、各車群の交差点への進入の優先度を決定し周囲の車両に通知するステップと、
前記優先度にしたがって、交差点への進入を行うステップと、
を含み、
前記交差点への進入を行うステップは、
前記リーダ車両が、車両の走行開始を周囲の車両に通知するステップと、
前記走行開始の通知の受信後に、前記優先度が最も高い車群の先頭車両が、同一車群内の他の車両に対して通行開始を通知するステップと、
を含む、
道路交通管制方法。 - 前記交差点への進入を行うステップは、さらに、
交差点を走行中の車群内の全ての車両が交差点の通行を完了したことを検知するステップと、
交差点を走行中の車群内の全ての車両が交差点の通行を完了した後に、次に優先度が高い車群の先頭車両が、同一車群内の他の車両に対して通行開始を通知するステップと、
を含む、請求項1に記載の道路交通管制方法。 - 前記優先度を決定するステップでは、車両台数の多い車群ほど高い優先度が割り当てられるか、または車両台数の少ない車群ほど高い優先度が割り当てられる、
請求項1または2に記載の道路交通管制方法。 - 全ての進入方向からの車群が交差点への進入を終了した後に、いずれの進入方向からの車群も交差点への進入を行わない停車期間を設けて、歩行者による交差点の通行を許可するステップをさらに含む、
請求項3に記載の道路交通管制方法。 - 前記停車期間の開始時に、少なくとも交差点の先頭で停車している車両は、ハザードランプを点滅させる、
請求項4に記載の道路交通管制方法。 - 前記停車期間の終了時に、警笛を鳴らして、歩行者の停止を促すステップをさらに含む、
請求項4または5に記載の道路交通管制方法。 - 緊急車両が走行する旨の通知を受信した場合に、交差点への進入を停止させるか停止を促す制御を行うステップをさらに含む、
請求項1〜6のいずれかに記載の道路交通管制方法。 - 車車間通信を用いて交差点において車両間で自律的に交通管制を行う交通管制システムであって、
各車両が、
交差点に設置された信号機の異常を検知するステップと、
異常が検知された信号機の設置されている交差点に接近した際に、車両を停止させるか停止を促す制御を行うステップと、
交差点内にリーダ車両が存在するか判定し、存在しない場合にはリーダ車両として振る舞い、存在する場合にはリーダ車両以外の一般車両として振る舞うことを決定するステップと、
車車間通信により交差点に対して同一の進入方向から進入する車群の車両台数を検出するステップと、
自車両がリーダ車両である場合に、各車群の車両台数に基づいて、各車群の交差点への進入の優先度を決定し周囲の車両に通知するステップと、
前記優先度にしたがって、交差点への進入を行うステップと、
を実行し、
前記交差点への進入を行うステップにおいて、
自車両がリーダ車両である場合に、車両の走行開始を周囲の車両に通知するステップと、
自車両が前記優先度が最も高い車群の先頭車両である場合に、前記走行開始の通知の受信後に、同一車群内の他の車両に対して通行開始を通知するステップを、
さらに実行する、道路交通管制システム。 - 交差点に設置された信号機の異常を検知する異常検知手段と、
異常が検知された信号機の設置されている交差点に接近した際に、車両を停止させるか停止を促す制御を行う停車制御手段と、
交差点内にリーダ車両が存在するか判定し、存在しない場合にはリーダ車両として振る舞い、存在する場合にはリーダ車両以外の一般車両として振る舞うことを決定する決定手段と、
車車間通信により交差点に対して同一の進入方向から進入する車群の車両台数を検出する車群台数検出手段と、
各車群の車両台数に基づいて、各車群の交差点への進入の優先度を決定する進入優先度決定手段と、
前記優先度にしたがって、交差点への進入を行う進入制御手段と、
を備え、
前記進入制御手段は、
自車両がリーダ車両である場合には、車両の走行開始を周囲の車両に通知し、
自車両が前記優先度が最も高い車群の先頭車両である場合に、前記走行開始の通知の受信後に、同一車群内の他の車両に対して通行開始を通知する、
車載端末。 - 車車間通信を用いて交差点において車両間で自律的に交通管制を行う道路交通管制方法であって、
交差点に設置された信号機の異常を検知するステップと、
異常が検知された信号機の設置されている交差点に接近した際に、車両を停止させるか停止を促す制御を行うステップと、
車車間通信により交差点に対して同一の進入方向から進入する車群の車両台数を検出するステップと、
各車群の車両台数に基づいて、各車群の交差点への進入の優先度を決定するステップと、
前記優先度にしたがって、交差点への進入を行うステップと、
を含む、道路交通管制方法。
全ての進入方向からの車群が交差点への進入を終了した後に、いずれの進入方向からの車群も交差点への進入を行わない停車期間を設けて、歩行者による交差点の通行を許可するステップと、
を含み、
前記停車期間の開始時に、少なくとも交差点の先頭で停車している車両は、ハザードランプを点滅させる、
道路交通管制方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012201664A JP5949366B2 (ja) | 2012-09-13 | 2012-09-13 | 道路交通管制方法、道路交通管制システムおよび車載端末 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012201664A JP5949366B2 (ja) | 2012-09-13 | 2012-09-13 | 道路交通管制方法、道路交通管制システムおよび車載端末 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014056483A JP2014056483A (ja) | 2014-03-27 |
| JP5949366B2 true JP5949366B2 (ja) | 2016-07-06 |
Family
ID=50613732
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012201664A Expired - Fee Related JP5949366B2 (ja) | 2012-09-13 | 2012-09-13 | 道路交通管制方法、道路交通管制システムおよび車載端末 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5949366B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180091330A (ko) * | 2017-02-06 | 2018-08-16 | 경북대학교 산학협력단 | 자율 주행 시스템에서의 그룹 리더 선정 방법 |
| CN109615877A (zh) * | 2018-12-24 | 2019-04-12 | 中国船舶重工集团公司第七0研究所 | 一种红绿灯路口车辆检测器失效的补偿方法 |
| CN110047285A (zh) * | 2019-04-18 | 2019-07-23 | 河南勇威特种设备有限公司 | 一种交通信号灯检测装置及检测方法 |
Families Citing this family (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10520952B1 (en) | 2011-07-06 | 2019-12-31 | Peloton Technology, Inc. | Devices, systems, and methods for transmitting vehicle data |
| US20170242443A1 (en) | 2015-11-02 | 2017-08-24 | Peloton Technology, Inc. | Gap measurement for vehicle convoying |
| US11334092B2 (en) | 2011-07-06 | 2022-05-17 | Peloton Technology, Inc. | Devices, systems, and methods for transmitting vehicle data |
| US10520581B2 (en) | 2011-07-06 | 2019-12-31 | Peloton Technology, Inc. | Sensor fusion for autonomous or partially autonomous vehicle control |
| US8744666B2 (en) | 2011-07-06 | 2014-06-03 | Peloton Technology, Inc. | Systems and methods for semi-autonomous vehicular convoys |
| CA2907452A1 (en) | 2013-03-15 | 2014-09-18 | Peloton Technology Inc. | Vehicle platooning systems and methods |
| JP2016031707A (ja) * | 2014-07-30 | 2016-03-07 | パイオニア株式会社 | 通信装置、通信方法及び通信プログラム |
| JP6457826B2 (ja) * | 2015-01-30 | 2019-01-23 | 株式会社Subaru | 車両の運転支援装置 |
| JP6288859B2 (ja) * | 2015-07-07 | 2018-03-07 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、および車両制御プログラム |
| US10712748B2 (en) | 2015-08-26 | 2020-07-14 | Peloton Technology, Inc. | Devices, systems, and methods for generating travel forecasts for vehicle pairing |
| US10339807B2 (en) * | 2015-08-26 | 2019-07-02 | Ford Global Technologies, Llc | Apparatus using sync and balanced V2V communication |
| JP6690056B2 (ja) | 2016-08-22 | 2020-04-28 | ぺロトン テクノロジー インコーポレイテッド | 自動連続車両の制御システムアーキテクチャ |
| US9818299B1 (en) | 2016-10-17 | 2017-11-14 | Ford Global Technologies, Llc | Vehicle-to-vehicle intersection navigation control |
| JP6807715B2 (ja) * | 2016-11-21 | 2021-01-06 | 三菱電機株式会社 | 信号制御装置及び信号制御システム |
| DE112016007501T5 (de) * | 2016-12-07 | 2019-10-24 | Honda Motor Co., Ltd. | Regel-/steuervorrichtung und regel-/steuerverfahren |
| JP6614178B2 (ja) * | 2017-02-16 | 2019-12-04 | トヨタ自動車株式会社 | 車両通信システム及び車両制御装置 |
| JP6962802B2 (ja) * | 2017-12-08 | 2021-11-05 | トヨタ自動車株式会社 | 運転支援装置、運転支援方法及びプログラム |
| WO2019138498A1 (ja) * | 2018-01-11 | 2019-07-18 | 住友電気工業株式会社 | 車載装置、調整方法、およびコンピュータプログラム |
| US10836398B2 (en) | 2018-06-26 | 2020-11-17 | International Business Machines Corporation | Vehicular navigational control |
| US10899323B2 (en) | 2018-07-08 | 2021-01-26 | Peloton Technology, Inc. | Devices, systems, and methods for vehicle braking |
| JP7491661B2 (ja) * | 2018-08-30 | 2024-05-28 | Lineヤフー株式会社 | 通知装置、通知方法および通知プログラム |
| US10762791B2 (en) | 2018-10-29 | 2020-09-01 | Peloton Technology, Inc. | Systems and methods for managing communications between vehicles |
| JP2019071132A (ja) * | 2019-02-05 | 2019-05-09 | パイオニア株式会社 | 通信装置、通信方法及び通信プログラム |
| WO2020191542A1 (zh) * | 2019-03-22 | 2020-10-01 | 京东方科技集团股份有限公司 | 目标车辆的快速通行方法及装置 |
| US11427196B2 (en) | 2019-04-15 | 2022-08-30 | Peloton Technology, Inc. | Systems and methods for managing tractor-trailers |
| CN115088279B (zh) * | 2020-01-07 | 2024-12-17 | 高通股份有限公司 | 交叉路口轨迹确定和消息接发 |
| KR102862415B1 (ko) * | 2020-04-30 | 2025-09-18 | 퀄컴 인코포레이티드 | V2x 그룹 관리에서의 리더 선택 |
| JP2021061047A (ja) * | 2021-01-05 | 2021-04-15 | パイオニア株式会社 | 通信装置、通信方法及び通信プログラム |
| JP7552449B2 (ja) | 2021-03-11 | 2024-09-18 | トヨタ自動車株式会社 | 交差点管制システム、交差点管制方法、及び、プログラム |
| CN112908005B (zh) * | 2021-03-31 | 2022-04-26 | 淮阴工学院 | 一种基于负反馈系统的交通信号灯状态实时判断方法 |
| JP7412464B2 (ja) * | 2022-02-08 | 2024-01-12 | 三菱電機株式会社 | 車両制御装置、自律分散型交通管制システムおよび車両制御方法 |
| JP7634582B2 (ja) * | 2023-02-15 | 2025-02-21 | 本田技研工業株式会社 | 運転支援装置および車載装置 |
| CN116030644B (zh) * | 2023-03-20 | 2024-12-27 | 中国公路工程咨询集团有限公司 | 基于大数据的数字交通调控系统及方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1151667A (ja) * | 1997-07-30 | 1999-02-26 | Alpine Electron Inc | 車両間通信方式 |
| JP3160249B2 (ja) * | 1998-09-11 | 2001-04-25 | 財団法人新産業創造研究機構 | 信号灯の制御装置 |
| JP4706365B2 (ja) * | 2005-07-22 | 2011-06-22 | トヨタ自動車株式会社 | 車両制御システム |
| JP4985120B2 (ja) * | 2007-06-07 | 2012-07-25 | 株式会社デンソー | 車両用危険通知システム |
| JP2009040236A (ja) * | 2007-08-09 | 2009-02-26 | Omron Corp | 車両用報知装置 |
| US7639159B2 (en) * | 2007-10-29 | 2009-12-29 | Kapsch Trafficcom Ag | System and method for determining intersection right-of-way for vehicles |
| JP2010026618A (ja) * | 2008-07-16 | 2010-02-04 | Alpine Electronics Inc | 車載用ナビゲーション装置及び交差点進入案内方法 |
| JP5516070B2 (ja) * | 2010-05-25 | 2014-06-11 | トヨタ自動車株式会社 | 車群管理方法および隊列走行通信システム |
-
2012
- 2012-09-13 JP JP2012201664A patent/JP5949366B2/ja not_active Expired - Fee Related
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180091330A (ko) * | 2017-02-06 | 2018-08-16 | 경북대학교 산학협력단 | 자율 주행 시스템에서의 그룹 리더 선정 방법 |
| KR101971333B1 (ko) * | 2017-02-06 | 2019-04-22 | 경북대학교 산학협력단 | 자율 주행 시스템에서의 그룹 리더 선정 방법 |
| CN109615877A (zh) * | 2018-12-24 | 2019-04-12 | 中国船舶重工集团公司第七0研究所 | 一种红绿灯路口车辆检测器失效的补偿方法 |
| CN110047285A (zh) * | 2019-04-18 | 2019-07-23 | 河南勇威特种设备有限公司 | 一种交通信号灯检测装置及检测方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014056483A (ja) | 2014-03-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5949366B2 (ja) | 道路交通管制方法、道路交通管制システムおよび車載端末 | |
| EP3632761B1 (en) | Electronic control device, vehicle control method, and vehicle control program | |
| JP5041076B2 (ja) | 運転支援装置 | |
| JP4230341B2 (ja) | 運転支援装置 | |
| JP6007739B2 (ja) | 運転支援装置及び運転支援方法 | |
| JP2014041556A (ja) | 運転支援装置 | |
| JP2011044063A (ja) | 車両運転支援装置及び支援方法 | |
| JP5803844B2 (ja) | 割込予測装置、割込予測方法、及び運転支援システム | |
| JP5030918B2 (ja) | 情報提供装置および情報提供方法 | |
| JP2011192177A (ja) | 前方状況予測装置 | |
| CN110398952B (zh) | 通知主车辆的操作者另一车辆中的接管事件的系统及方法 | |
| JP5241877B2 (ja) | 情報提供装置および情報提供方法 | |
| JP5401971B2 (ja) | 運転支援装置 | |
| JP2005228111A (ja) | 車両退避指示装置、車両退避指示システム及び車両退避指示方法 | |
| WO2018225365A1 (ja) | 車両制御装置 | |
| JP5025617B2 (ja) | 情報提供装置および情報提供方法 | |
| JP2011221853A (ja) | 運転者支援装置および運転者支援システム | |
| JP2011221854A (ja) | 信号灯色制御装置 | |
| JP5640576B2 (ja) | 走行支援装置、及び走行支援システム | |
| JP5278021B2 (ja) | 運転支援装置 | |
| JP4715788B2 (ja) | 車両制御システム、車載装置及び車両 | |
| JP5299309B2 (ja) | 車両制御装置 | |
| JP2012203785A (ja) | 移動体通信装置及び走行支援方法 | |
| JP2012047147A (ja) | 制御装置 | |
| JP5071893B2 (ja) | 車両制御システム、車載装置及び車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150127 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150925 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151006 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151203 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160510 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160523 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5949366 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |