JP5985384B2 - 作用力測定装置および作用力測定方法 - Google Patents
作用力測定装置および作用力測定方法 Download PDFInfo
- Publication number
- JP5985384B2 JP5985384B2 JP2012284542A JP2012284542A JP5985384B2 JP 5985384 B2 JP5985384 B2 JP 5985384B2 JP 2012284542 A JP2012284542 A JP 2012284542A JP 2012284542 A JP2012284542 A JP 2012284542A JP 5985384 B2 JP5985384 B2 JP 5985384B2
- Authority
- JP
- Japan
- Prior art keywords
- force
- finger
- steering wheel
- axis
- acting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 10
- 238000001514 detection method Methods 0.000 claims description 76
- 238000003825 pressing Methods 0.000 claims description 13
- 230000006870 function Effects 0.000 claims description 7
- 238000000691 measurement method Methods 0.000 claims description 2
- 210000003811 finger Anatomy 0.000 description 189
- 210000003813 thumb Anatomy 0.000 description 29
- 238000005259 measurement Methods 0.000 description 25
- 230000005540 biological transmission Effects 0.000 description 19
- 210000004247 hand Anatomy 0.000 description 16
- 239000013013 elastic material Substances 0.000 description 9
- 238000012937 correction Methods 0.000 description 7
- 210000004932 little finger Anatomy 0.000 description 7
- 238000010586 diagram Methods 0.000 description 6
- 239000000463 material Substances 0.000 description 6
- 230000001629 suppression Effects 0.000 description 5
- 230000001133 acceleration Effects 0.000 description 4
- 229920001971 elastomer Polymers 0.000 description 4
- 210000004935 right thumb Anatomy 0.000 description 4
- 239000011347 resin Substances 0.000 description 3
- 229920005989 resin Polymers 0.000 description 3
- JOYRKODLDBILNP-UHFFFAOYSA-N Ethyl urethane Chemical compound CCOC(N)=O JOYRKODLDBILNP-UHFFFAOYSA-N 0.000 description 2
- 101150013134 Fzd10 gene Proteins 0.000 description 2
- 244000043261 Hevea brasiliensis Species 0.000 description 2
- 230000003321 amplification Effects 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 230000005489 elastic deformation Effects 0.000 description 2
- 210000001503 joint Anatomy 0.000 description 2
- 210000004936 left thumb Anatomy 0.000 description 2
- 210000000811 metacarpophalangeal joint Anatomy 0.000 description 2
- 229920003052 natural elastomer Polymers 0.000 description 2
- 229920001194 natural rubber Polymers 0.000 description 2
- 238000003199 nucleic acid amplification method Methods 0.000 description 2
- 239000004033 plastic Substances 0.000 description 2
- 229910000838 Al alloy Inorganic materials 0.000 description 1
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 210000001145 finger joint Anatomy 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
Images



















Landscapes
- Force Measurement Appropriate To Specific Purposes (AREA)
Description
しかし、上述の操舵力検出装置や操舵力計においては、操縦者はステアリング装置に取り付けられた測定用の装置を介して操舵操作しなければならないため、実際の運転時に手とステアリングホイールとの間に作用する力を正確に測定することができない。また、上述の操舵力検出装置や操舵力計によっては、ステアリングホイールの周方向以外の方向の作用力を測定することはできないという問題がある。
〔課題を解決するための手段および発明の効果〕
また、本発明によれば、上記の構成において、前記装着部材の指から押圧力を受ける部分は、力センサに対応する部位が他の部位よりも指の側へ高い「へ」の字形に屈曲した断面形状を有し、該断面形状は前記位置決め手段として機能するよう構成される(請求項6の構成)。
上記の構成によれば、装着部材の指から押圧力を受ける部分は、力センサに対応する部位が他の部位よりも指の側へ高い「へ」の字形に屈曲した断面形状を有し、該断面形状が位置決め手段として機能する。よって、「へ」の字形に屈曲した断面形状が設けられていない場合に比して、指の第一関節に対する力センサの位置決めを容易にかつ正確に行うことができる。
上記の構成によれば、両手の全ての指がステアリングホイールに与える力を検出することができるので、複数の指が両手の全ての指の一部である場合に比して、ステアリングホイールと操作者の手との間に作用する力を正確に測定することができる。
また、本発明によれば、請求項1乃至8の何れか一つに記載の作用力測定装置を使用して、操作者が手により把持して操作するステアリングホイールと操作者の手との間に作用する力を測定する作用力測定方法であって、前記力検出装置を操作者の少なくとも一つの指に装着し、前記力検出装置により検出される少なくとも二つの方向の力に基づいて前記演算制御装置により作用力を演算させることを特徴とする作用力測定方法(請求項9の構成)によって達成される。
本発明の一つの好ましい態様によれば、上記の構成において、力センサは、操作者の指がステアリングホイールに押圧力を与える方向、該方向に垂直な他の方向、および該他の方向に垂直な更に他の方向の三つの方向について力を検出するよう構成される。
図1は、指サック型の力検出装置を有し、車両のステアリングホイールにおける作用力を測定するよう構成された本発明による作用力測定装置の第一の実施形態を示す概略構成図である。

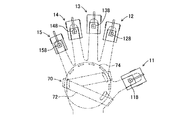
3軸力センサ118〜208により検出されるx軸方向の力Fx1〜Fx10に対する補正係数をそれぞれKx1〜Kx10とし、ステアリングホイール104を回転軸線106の周りに時計まわり方向へ回転させる力を正とする。左右の手100及び102によりステアリングホイール104を回転させる操舵力(ステアリングホイールの回転を阻止する保舵力)Fxr、Fxlは、それぞれ下記の式(1)及び(2)により表され、それらの総和Fxrlは下記の式(3)により表される。
Fxl=Kx6Fx6+Kx7Fx7+Kx8Fx8+Kx9Fx9+Kx10Fx10 …(2)
Fxrl=Fxr−Fxl
=Kx1Fx1+Kx2Fx2+Kx3Fx3+Kx4Fx4+Kx5Fx5
(−Kx6Fx6+Kx7Fx7+Kx8Fx8+Kx9Fx9+Kx10Fx10) …(3)
また、ステアリングホイール104の回転軸線106と3軸力センサ118および168との半径方向の距離をR1とし、ステアリングホイール104の回転軸線106と3軸力センサ128〜158および178〜208との半径方向の距離をR2とする。左右の手100及び102による操舵トルク(保舵トルク)Txr、Txlは、それぞれ下記の式(4)及び(5)により表され、それらの総和Txrlは下記の式(6)により表される。
Txl=Kx6Fx6R1+(Kx7Fx7+Kx8Fx8+Kx9Fx9+Kx10Fx10)R2 …(5)
Txrl=Fxr−Fxl
=Kx1Fx1R1+(Kx2Fx2+Kx3Fx3+Kx4Fx4+Kx5Fx5)R2
−{Kx6Fx6R1+(Kx7Fx7+Kx8Fx8+Kx9Fx9+Kx10Fx10)R2}
…(6)
Txrl=(Fxr−Fxl)R
={Kx1Fx1R1+Kx2Fx2+Kx3Fx3+Kx4Fx4+Kx5Fx5
−(Kx6Fx6R1+Kx7Fx7+Kx8Fx8+Kx9Fx9+Kx10Fx10)}R
…(7)
また、図11および図12は、それぞれ右手100および左手102がステアリングホイール104を把握した状態を、円環部104Aの軸線108に垂直な断面(ステアリングホイールの径方向の断面)にて示している。なお、図11において、力Fx25F、Fy25、Fz25は、それぞれ力Fx2〜Fx5の和、力Fy2〜Fy5の和、力Fz2〜Fz5の和を示している。また、図12において、力Fx710、Fy710、Fz710は、それぞれ力Fx7〜Fx10の和、Fy7〜Fy10の和、力Fz7〜Fz10の和を示している。
Fa1=Fy1・cosα1−Fz1・sinα1 …(8)
Fa25=−Fy25・cosα25+Fz25・sinα25 …(9)
Far=Fa1+Fa25
=Fy1・cosα1−Fz1・sinα1−Fy25・cosα25+Fz25・sinα25 …(10)
Fa6=Fy6・cosα6−Fz6・sinα6 …(11)
Fa710=−Fy710・cosα710+Fz710・sinα710 …(12)
Fal=Fa6+Fa710
=Fy6・cosα6−Fz6・sinα6−Fy710・cosα710+Fz710・sinα710
…(14)
=Fy1・cosα1−Fz1・sinα1−Fy25・cosα25+Fz25・sinα25
+Fy6・cosα6−Fz6・sinα6−Fy710・cosα710+Fz710・sinα710
…(15)
Fy25=Fy2+Fy3+Fy4+Fy5 …(16)
Fy710=Fy7+Fy8+Fy9+Fy10 …(17)
Fz25=Fz2+Fz3+Fz4+Fz5 …(18)
Fz710=Fz7+Fz8+Fz9+Fz10 …(19)
図13に示されている如く、水平方向に対する回転軸線106の傾斜角をβとすると、回転軸線106に沿う力Faがステアリングホイール104の円環部104Aを車両の後方へ及ぼす力Faxは、下記の式(20)により表される。
Fax=Fa・cosβ …(20)
Fxr=Fx1・sinγr・sinβ+Fx25・sinγr・sinβ
=(Fx1+Fx25)sinγr・sinβ …(21)
Fxl=Fx6・sinγl・sinβ+Fx710・sinγl・sinβ
=(Fx6+Fx710)sinγl・sinβ …(22)
Fhx=Fax+Fxr+Fxl
=Fa・cosβ+(Fx1+Fx25)・sinγr・sinβ
+(Fx6+Fx710)・sinγl・sinβ …(23)
右手100の親指がステアリングホイール104の円環部104Aをステアリングホイールの径方向の右方へ及ぼす力Fhy1は、図11において右向きの力であるので、下記の式(24)により表される。
Fhy1=Fy1・sinα1+Fz1・cosα1 …(24)
Fhy25=−Fy25・sinα25−Fz25・cosα25 …(25)
Fhyr=Fhy1+Fhy25
=Fy1・sinα1+Fz1・cosα1−Fy25・sinα25−Fz25・cosα25 …(26)
Fhy6=−Fy6・sinα6−Fz6・cosα6 …(27)
Fhy710=Fy710・sinα710+Fz710・cosα710 …(28)
Fhyl=Fhy6+Fhy710
=−Fy6・sinα6−Fz6・cosα6+Fy710・sinα710+Fz710・cosα710
…(29)
Fhy=Fhyr・cosγr+Fhyl・cosγl
=(Fy1・sinα1+Fz1・cosα1−Fy25・sinα25−Fz25・cosα25)cosγr
+(−Fy6・sinα6−Fz6・cosα6+Fy710・sinα710+Fz710・cosα710)
・cosγl …(30)
スイッチ60が作業者によってオンに切り替えられると、データロガー装置62の制御部52は、力検出装置11〜20および操舵角センサ84等のセンサより予め設定された順序にて信号を取り込む。演算部54は、上記各式に従って操舵力(保舵力)Fxrlまたは操舵トルク(保舵トルク)Txrl、回転軸線に沿う力Faまたは前後力Fhx、左右力Fhyを演算する。
上述の如く構成された作用力測定装置10を用いて行われる車両のステアリングホイールにおける作用力の測定は、以下の手順にて実行され、これにより本発明による作用力測定方法の第一の実施形態が実行される。
図15は、指輪型の力検出装置を有し、車両のステアリングホイールにおける作用力を測定するよう構成された本発明による作用力測定装置の第二の実施形態を示す概略構成図である。
図20は、指サック型の力検出装置を有し、機械装置の揺動操縦捍における作用力を測定するよう構成された本発明による作用力測定装置の第三の実施形態を示す概略構成図である。
前後力、即ち、揺動操縦捍402を前後方向に揺動操作する力は、第一の実施形態の回転軸線に沿う力と等価である。換言すれば、図11を揺動操縦捍402の軸線に垂直な断面とみなし、円環部104Aおよび軸線108をそれぞれ揺動操縦捍402およびその軸線406とみなすことができる。
Fjx1=Fy1・cosα1−Fz1・sinα1 …(31)
Fjx25=−Fy25・cosα25+Fz25・sinα25 …(32)
Fjx=Fjx1+Fjx25
=Fy1・cosα1−Fz1・sinα1+Fy25・cosα25+Fz25・sinα25 …(33)
右手の親指が軸線406に垂直に揺動操縦捍402を右方向へ及ぼす力Fjy1は、上記式(24)に対応する下記の式(34)により表される。
Fjy1=Fy1・sinα1+Fz1・cosα1 …(34)
Fjy25=−Fy25・sinα25−Fz25・cosα25 …(35)
Fjy=Fjy1+Fjy25
=Fy1・sinα1+Fz1・cosα1−Fy25・sinα25−Fz25・cosα25 …(36)
揺動操縦捍402の支点404から力FjxおよびFjyの作用点406までの半径をRjとすると、前後方向の揺動トルクTjxおよび左右方向の揺動トルクTjyは、それぞれ下記の式(37)および(38)により表される。
Tjx=Fjx・Rj
=(Fy1・cosα1−Fz1・sinα1−Fy25・cosα25+Fz25・sinα25)Rj
…(37)
Tjy=Fjy・Rj
=(Fy1・sinα1+Fz1・cosα1−Fy25・sinα25−Fz25・cosα25)Rj
…(38)
+(−Fy2・cosα25+Fz2・sinα25)Rj12
+(−Fy3・cosα25+Fz3・sinα25)Rj13
+(−Fy4・cosα25+Fz4・sinα25)Rj14
+(−Fy5・cosα25+Fz5・sinα25)Rj15
…(39)
Tjy=(Fy1・cosα1+Fz1・cosα1)Rj11
−(Fy2・sinα25+Fz2・cosα25)Rj12
−(Fy3・sinα25+Fz3・cosα25)Rj13
−(Fy4・sinα25+Fz4・cosα25)Rj14
−(Fy5・sinα25+Fz5・cosα25)Rj15
…(40)
Fx=Fx′・cosω+Fy′・sinω …(41)
Fy=−Fx′・sinω+Fy′・cosω …(42)
Fx=Fx′・cosω …(43)
Fy=−Fx′・sinω …(44)
Claims (10)
- 操作者が手により把持して操作するステアリングホイールと操作者の手との間に作用する力を測定する作用力測定装置であって、操作者の複数の指に装着される複数の装着部材と、操作者が手によりステアリングホイールを把持するとステアリングホイールと指の第一関節との間に位置するよう対応する装着部材に固定された複数の力センサとを有する力検出装置と、前記力センサにより検出された力に基づいて作用力を演算する演算制御装置とを備え、前記力センサは、操作者の指がステアリングホイールに押圧力を与える方向および該方向に垂直な他の一つの方向の少なくとも二つの方向について力を検出し、前記演算制御装置は、前記少なくとも二つの方向の力に基づいて作用力を演算することを特徴とする作用力測定装置。
- 前記他の一つの方向は、指の長手方向を横切る方向であることを特徴とする請求項1に記載の作用力測定装置。
- 前記他の一つの方向は、指の長手方向を垂直に横切る方向であることを特徴とする請求項2に記載の作用力測定装置。
- ステアリングホイールは、回転軸線のまわりに回転操作されるものであり、前記演算制御装置は、前記少なくとも二つの方向の力に基づいて回転操作の周方向の作用力および前記回転軸線に沿う方向の作用力を演算することを特徴とする請求項1ないし3の何れか一つに記載の作用力測定装置。
- 前記装着部材は、前記力センサが指の第一関節に対し予め設定された位置に位置するよう、指の第一関節に対し前記装着部材および前記力センサを位置決めする位置決め手段を有することを特徴とする請求項1ないし4の何れか一つに記載の作用力測定装置。
- 前記装着部材の指から押圧力を受ける部分は、力センサに対応する部位が他の部位よりも指の側へ高い「へ」の字形に屈曲した断面形状を有し、該断面形状は前記位置決め手段として機能することを特徴とする請求項5に記載の作用力測定装置。
- 前記装着部材は、前記装着部材が指に対し相対的に回転することを抑制する回転抑制手段を有することを特徴とする請求項1ないし6の何れか一つに記載の作用力測定装置。
- 前記複数の指は、両手の全ての指であることを特徴とする請求項1ないし7の何れか一つに記載の作用力測定装置。
- 請求項1乃至8の何れか一つに記載の作用力測定装置を使用して、操作者が手により把持して操作するステアリングホイールと操作者の手との間に作用する力を測定する作用力測定方法であって、前記力検出装置を操作者の複数の指に装着し、各力検出装置により検出される少なくとも二つの方向の力に基づいて前記演算制御装置により作用力を演算させることを特徴とする作用力測定方法。
- 前記ステアリングホイールは、移動体を運転するために操作されるステアリングホイールであり、前記演算制御装置により前記移動体の移動パラメータと同期して作用力を記録することを特徴とする請求項9に記載の作用力測定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012284542A JP5985384B2 (ja) | 2012-12-27 | 2012-12-27 | 作用力測定装置および作用力測定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012284542A JP5985384B2 (ja) | 2012-12-27 | 2012-12-27 | 作用力測定装置および作用力測定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014126496A JP2014126496A (ja) | 2014-07-07 |
| JP5985384B2 true JP5985384B2 (ja) | 2016-09-06 |
Family
ID=51406099
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012284542A Expired - Fee Related JP5985384B2 (ja) | 2012-12-27 | 2012-12-27 | 作用力測定装置および作用力測定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5985384B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102237922B1 (ko) * | 2019-10-25 | 2021-04-08 | 주식회사 테스트원 | 물성 측정 장갑 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6719756B2 (ja) * | 2017-01-23 | 2020-07-08 | 学校法人早稲田大学 | 身体部位接触力センサ |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4586387A (en) * | 1982-06-16 | 1986-05-06 | The Commonwealth Of Australia | Flight test aid |
| JP2617489B2 (ja) * | 1987-10-13 | 1997-06-04 | 日本放送協会 | 関節センサー |
| JP4922504B2 (ja) * | 2001-06-29 | 2012-04-25 | 株式会社アミテック | 手袋型入力装置 |
| JP3912227B2 (ja) * | 2001-09-03 | 2007-05-09 | 株式会社豊田中央研究所 | 操舵感計測装置 |
| JP4076025B2 (ja) * | 2006-07-28 | 2008-04-16 | 独立行政法人産業技術総合研究所 | 指装着型6軸力覚センサ用指サック |
| JP4475288B2 (ja) * | 2007-04-20 | 2010-06-09 | 横浜ゴム株式会社 | 操舵操作力検出装置 |
| JP5700497B2 (ja) * | 2010-04-27 | 2015-04-15 | 株式会社 資生堂 | 動作検出センサのキャリブレーション方法 |
-
2012
- 2012-12-27 JP JP2012284542A patent/JP5985384B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102237922B1 (ko) * | 2019-10-25 | 2021-04-08 | 주식회사 테스트원 | 물성 측정 장갑 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014126496A (ja) | 2014-07-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6526669B2 (en) | Apparatus for acquiring human finger manipulation data | |
| CN107107342B (zh) | 双臂机械手的示教系统及双臂机械手的示教方法 | |
| CN103213134B (zh) | 机械手的控制方法和机械手 | |
| US8099215B2 (en) | Steering operation force detecting apparatus | |
| EP1649984B1 (en) | Method of estimating joint moment of two-legged walking mobile body | |
| JP5175691B2 (ja) | ロボットアームの教示システム及び方法 | |
| JP2009066683A (ja) | ロボットハンド及び制御方法、並びにプログラム | |
| EP3604097B1 (en) | Steering input information acquisition device | |
| WO2018123548A1 (ja) | 関節トルク演算装置、関節トルク演算方法及び関節トルク演算プログラム | |
| JP5985384B2 (ja) | 作用力測定装置および作用力測定方法 | |
| JP5239213B2 (ja) | 操舵装置 | |
| CN111712784A (zh) | 触觉呈现设备和触觉呈现系统 | |
| JP2024543877A5 (ja) | ||
| JP5187168B2 (ja) | 移乗支援装置 | |
| JP2008135033A (ja) | 手姿勢動作検出装置 | |
| JP2016203264A (ja) | ロボットハンド | |
| JP5267324B2 (ja) | 移動体、補正値の算出方法、及びプログラム | |
| JP5905840B2 (ja) | 触覚センサシステム、軌道取得装置、及び、ロボットハンド | |
| JP2014122880A (ja) | 車両の衝突試験装置 | |
| JP2008065860A (ja) | 操作入力装置 | |
| WO2021171009A1 (en) | Force sensing device | |
| US9162698B2 (en) | Vehicular input apparatus | |
| JP2001344053A (ja) | 操作入力装置 | |
| JP7766412B2 (ja) | 圧力センサデバイス、圧力センサデバイスの製造方法、作業管理システムおよびグローブの製造方法 | |
| JP5130573B2 (ja) | ロボットハンド装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150818 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160412 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160413 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160606 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160713 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160803 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5985384 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |