JP6020060B2 - 伝達トルク推定装置 - Google Patents
伝達トルク推定装置 Download PDFInfo
- Publication number
- JP6020060B2 JP6020060B2 JP2012247899A JP2012247899A JP6020060B2 JP 6020060 B2 JP6020060 B2 JP 6020060B2 JP 2012247899 A JP2012247899 A JP 2012247899A JP 2012247899 A JP2012247899 A JP 2012247899A JP 6020060 B2 JP6020060 B2 JP 6020060B2
- Authority
- JP
- Japan
- Prior art keywords
- main clutch
- model
- cam member
- clutch
- friction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D27/00—Magnetically- or electrically- actuated clutches; Control or electric circuits therefor
- F16D27/10—Magnetically- or electrically- actuated clutches; Control or electric circuits therefor with an electromagnet not rotating with a clutching member, i.e. without collecting rings
- F16D27/108—Magnetically- or electrically- actuated clutches; Control or electric circuits therefor with an electromagnet not rotating with a clutching member, i.e. without collecting rings with axially movable clutching members
- F16D27/112—Magnetically- or electrically- actuated clutches; Control or electric circuits therefor with an electromagnet not rotating with a clutching member, i.e. without collecting rings with axially movable clutching members with flat friction surfaces, e.g. discs
- F16D27/115—Magnetically- or electrically- actuated clutches; Control or electric circuits therefor with an electromagnet not rotating with a clutching member, i.e. without collecting rings with axially movable clutching members with flat friction surfaces, e.g. discs with more than two discs, e.g. multiple lamellae
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/14—Inputs being a function of torque or torque demand
- F16H59/16—Dynamometric measurement of torque
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D13/00—Friction clutches
- F16D13/22—Friction clutches with axially-movable clutching members
- F16D13/38—Friction clutches with axially-movable clutching members with flat clutching surfaces, e.g. discs
- F16D13/52—Clutches with multiple lamellae ; Clutches in which three or more axially moveable members are fixed alternately to the shafts to be coupled and are pressed from one side towards an axially-located member
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D13/00—Friction clutches
- F16D13/58—Details
- F16D13/60—Clutching elements
- F16D13/64—Clutch-plates; Clutch-lamellae
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D48/00—External control of clutches
- F16D48/06—Control by electric or electronic means, e.g. of fluid pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D48/00—External control of clutches
- F16D48/06—Control by electric or electronic means, e.g. of fluid pressure
- F16D48/064—Control of electrically or electromagnetically actuated clutches
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D48/00—External control of clutches
- F16D48/06—Control by electric or electronic means, e.g. of fluid pressure
- F16D48/066—Control of fluid pressure, e.g. using an accumulator
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H48/00—Differential gearings
- F16H48/12—Differential gearings without gears having orbital motion
- F16H48/14—Differential gearings without gears having orbital motion with cams
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2500/00—External control of clutches by electric or electronic means
- F16D2500/10—System to be controlled
- F16D2500/102—Actuator
- F16D2500/1021—Electrical type
- F16D2500/1022—Electromagnet
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2500/00—External control of clutches by electric or electronic means
- F16D2500/10—System to be controlled
- F16D2500/102—Actuator
- F16D2500/1026—Hydraulic
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2500/00—External control of clutches by electric or electronic means
- F16D2500/10—System to be controlled
- F16D2500/104—Clutch
- F16D2500/10443—Clutch type
- F16D2500/10468—Fluid adhesion clutch
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2500/00—External control of clutches by electric or electronic means
- F16D2500/10—System to be controlled
- F16D2500/104—Clutch
- F16D2500/10443—Clutch type
- F16D2500/10475—Magnetic field, e.g. electro-rheological, magnetisable particles
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2500/00—External control of clutches by electric or electronic means
- F16D2500/30—Signal inputs
- F16D2500/302—Signal inputs from the actuator
- F16D2500/3023—Force
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2500/00—External control of clutches by electric or electronic means
- F16D2500/30—Signal inputs
- F16D2500/304—Signal inputs from the clutch
- F16D2500/30402—Clutch friction coefficient
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2500/00—External control of clutches by electric or electronic means
- F16D2500/30—Signal inputs
- F16D2500/304—Signal inputs from the clutch
- F16D2500/30406—Clutch slip
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2500/00—External control of clutches by electric or electronic means
- F16D2500/30—Signal inputs
- F16D2500/304—Signal inputs from the clutch
- F16D2500/3041—Signal inputs from the clutch from the input shaft
- F16D2500/30415—Speed of the input shaft
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2500/00—External control of clutches by electric or electronic means
- F16D2500/30—Signal inputs
- F16D2500/304—Signal inputs from the clutch
- F16D2500/3042—Signal inputs from the clutch from the output shaft
- F16D2500/30426—Speed of the output shaft
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2500/00—External control of clutches by electric or electronic means
- F16D2500/70—Details about the implementation of the control system
- F16D2500/704—Output parameters from the control unit; Target parameters to be controlled
- F16D2500/70402—Actuator parameters
- F16D2500/70408—Torque
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2500/00—External control of clutches by electric or electronic means
- F16D2500/70—Details about the implementation of the control system
- F16D2500/704—Output parameters from the control unit; Target parameters to be controlled
- F16D2500/70402—Actuator parameters
- F16D2500/7042—Voltage
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2500/00—External control of clutches by electric or electronic means
- F16D2500/70—Details about the implementation of the control system
- F16D2500/708—Mathematical model
- F16D2500/7082—Mathematical model of the clutch
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Fluid Mechanics (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Mechanical Operated Clutches (AREA)
Description
実施形態の駆動力伝達装置1の伝達トルク推定装置70について、図面を参照して説明する。ここで、伝達トルク推定装置70は、駆動力伝達装置1を構成する各部材をモデリングすることにより、この駆動力伝達装置1に入力される制御信号および駆動力伝達装置1の状態、即ち駆動力の入力側のアウタケース10の回転角速度と駆動力の出力側のインナシャフト20の回転角速度とにより変動する伝達トルクを推定するものである。
駆動力伝達装置1は、例えば、四輪駆動車において、車両の走行状態に応じて駆動力が伝達される補助駆動輪側への駆動力伝達系に適用される。より詳細には、四輪駆動車において、駆動力伝達装置1は、エンジンの駆動力が伝達されるプロペラシャフトと補助駆動輪としてのリヤディファレンシャルとの間、もしくは、リヤディファレンシャルとドライブシャフトとの間に連結される。本実施形態においては、前者の場合であるものとして説明する。
次に、上述した構成からなる駆動力伝達装置1の基本的な動作について説明する。先ず、初期状態として、電磁クラッチ装置40の電磁コイル42に電流が供給されていない状態とする。この場合、パイロットクラッチ44が係合していないため、アウタケース10と支持側カム部材51とは相対回転可能な状態となる。また、移動側カム部材52は、インナシャフト20とスプライン嵌合しているため、インナシャフト20と共に回転する。このとき、移動側カム部材52は、弾性部材または潤滑油の遠心油圧などによって車両後方に付勢された状態となっている。
続いて、伝達トルク推定装置70による駆動力伝達装置1を構成する各部材のモデリングについて説明する。これにより、駆動力伝達装置1は、図2のような概念的なモデルとして示される。そして、伝達トルク推定装置70は、下記の式(1)〜(5)に対応する第一モデル〜第五モデルに基づいて、制御信号に対してアウタケース10とインナシャフト20との間で伝達可能なトルクを推定する。
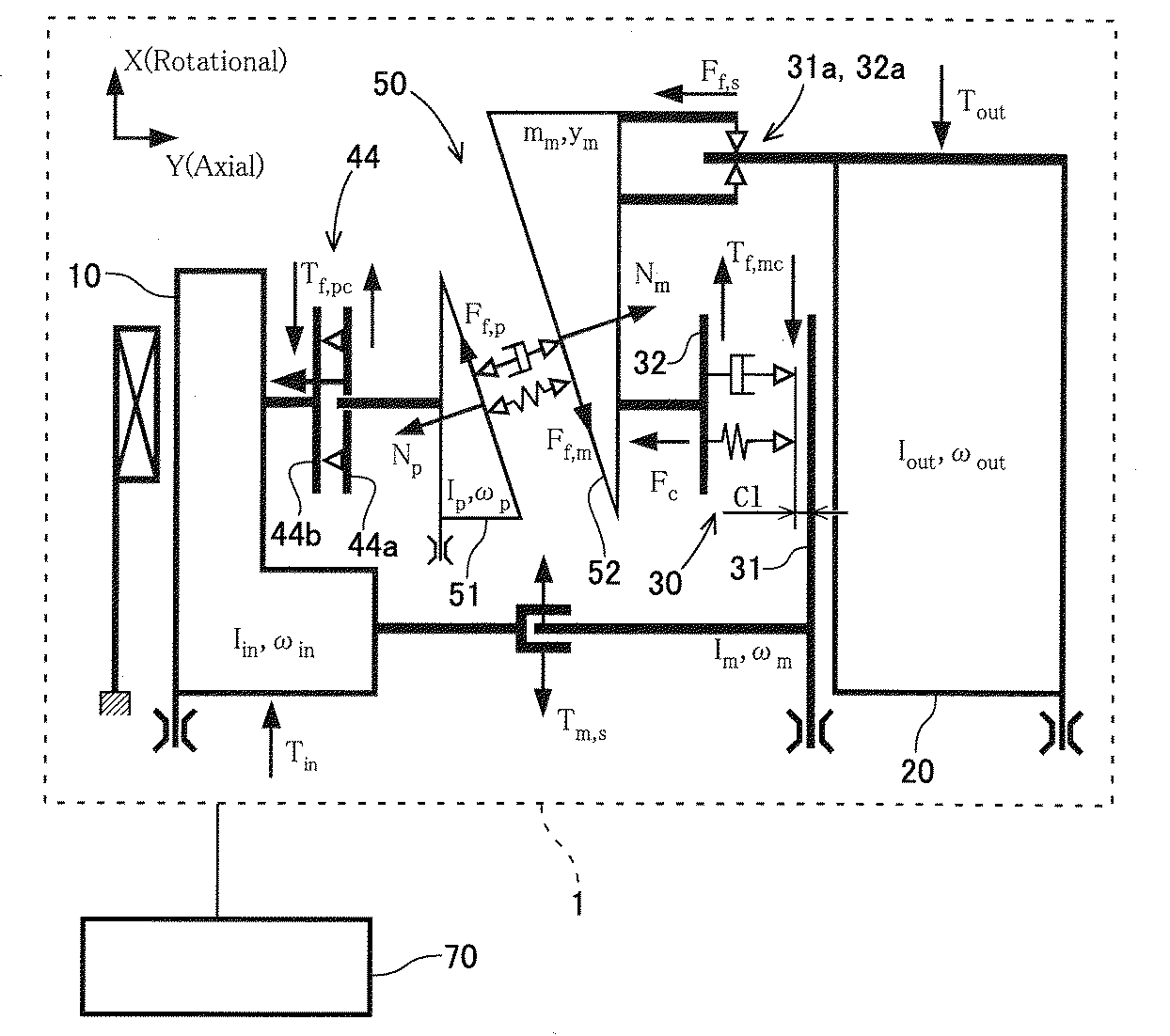
ここで、メインクラッチ30およびパイロットクラッチ44の摩擦モデルについて、より詳細に説明する。上述したように、メインクラッチ30の摩擦モデルである摩擦トルクTf,mcは第三モデルおよび第四モデルに含まれ、パイロットクラッチ44の摩擦モデルである摩擦トルクTf,pcは第一モデルおよび第二モデルに含まれる。ここで、パイロットクラッチ44の摩擦トルクTf,pcおよびメインクラッチ30の摩擦トルクTf,mcは、下記の式(6)(7)によりそれぞれ示される。
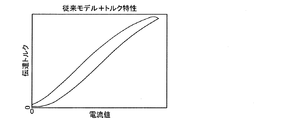
伝達トルク推定装置70は、上述のような駆動力伝達装置1のモデリングを行い、伝達可能なトルクを推定する。ここで、それぞれのモデリングによって推定される伝達トルクの変化を図3〜図8を参照して説明する。なお、図3〜図7では、電磁クラッチ装置40に所定の制御信号(電流)が入力されているものとし、この状態でアウタケース10に対してインナシャフト20を相対回転させた場合に、両部材10,20の角度差に対する伝達トルクの推定値を示している。
次に、伝達トルク推定装置70のモデリングを用いた制御信号(電流)に対する伝達トルクの推定について、図9〜図11を参照して説明する。なお、図9〜図11では、電磁クラッチ装置40に入力する制御信号を変化させた場合に、アウタケース10とインナシャフト20との間で伝達可能なトルクの推定値を示している。
上述した伝達トルク推定装置70によると、第一モデル〜第五モデルにより駆動力伝達装置1を構成する各部材の回転方向および軸方向の運動を効率的に表すことが可能となる。特に、第二モデルでは支持側カム部材51とインナパイロットクラッチ板44aを一体としてモデリングし、第五モデルではインナメインクラッチ板31と移動側カム部材52を一体としてモデリングするものとした。これにより、伝達トルク推定装置70は、駆動力伝達装置1におけるカム機構50の特有な動作などを勘案し、高精度に伝達トルクを推定することができる。よって、推定した伝達トルクの特性を反映して、駆動力伝達装置1の制御や設計をより好適に行うことができる。
実施形態において、メインクラッチ30の摩擦モデル(Tf,mc)およびパイロットクラッチ44の摩擦モデル(Tf,pc)は摩擦係数μp,μmを含み、この摩擦係数μp,μmは、移動速度と摩擦係数の関係を示すLuGreモデルにより定義されるものとした。これに対して、摩擦係数μp,μmは、より簡単なモデルとして、予め定められている動摩擦係数および静摩擦係数の2値を移動速度に応じて設定してもよい。
Claims (8)
- 円筒形状の外側回転部材と、
前記外側回転部材内に相対回転可能に同軸上に配置された内側回転部材と、
前記外側回転部材と前記内側回転部材との間でトルクを伝達するメインクラッチと、
制御信号に応じた磁力によりアーマチュアを引き寄せることで前記外側回転部材のトルクを伝達可能なパイロットクラッチを有する電磁クラッチ装置と、
前記メインクラッチと前記パイロットクラッチとの間に設けられ、前記パイロットクラッチを介して伝達される前記外側回転部材の回転と前記内側回転部材の回転との回転差を軸方向の押付力に変換して、支持側カム部材に対して移動側カム部材を軸方向移動させることにより前記メインクラッチを押圧するカム機構と、を備える駆動力伝達装置の伝達トルク推定装置であって、
前記メインクラッチは、前記内側回転部材との相対回転を規制され且つ軸方向移動を許容されたインナメインクラッチ板と、前記外側回転部材との相対回転を規制され且つ軸方向移動を許容されたアウタメインクラッチ板と、により構成され、
前記パイロットクラッチは、前記支持側カム部材との相対回転を規制され且つ軸方向移動を許容されたインナパイロットクラッチ板と、前記外側回転部材との相対回転を規制され且つ軸方向移動を許容されたアウタパイロットクラッチ板と、により構成され、
前記伝達トルク推定装置は、
前記パイロットクラッチの摩擦モデルを含み、前記外側回転部材の回転方向の運動方程式をモデリングされた第一モデルと、
前記パイロットクラッチの摩擦モデルを含み、前記支持側カム部材と前記インナパイロットクラッチ板を一体とした回転方向の運動方程式をモデリングされた第二モデルと、
前記メインクラッチの摩擦モデルを含み、前記アウタメインクラッチ板の回転方向の運動方程式をモデリングされた第三モデルと、
前記メインクラッチの摩擦モデルを含み、前記内側回転部材の回転方向の運動方程式をモデリングされた第四モデルと、
前記支持側カム部材と前記移動側カム部材の位相差に対する前記移動側カム部材の移動量を示すカム動作モデル、および前記メインクラッチと前記カム機構の軸方向の粘弾性モデルを含み、前記インナメインクラッチ板と前記移動側カム部材を一体とした軸方向の運動方程式をモデリングされた第五モデルと、
に基づいて、前記制御信号に対して前記外側回転部材と前記内側回転部材との間で伝達可能なトルクを推定する伝達トルク推定装置。 - 前記パイロットクラッチの摩擦モデルは、前記インナパイロットクラッチ板と前記アウタパイロットクラッチ板との相対的な角速度差に応じた摩擦係数と、前記制御信号に応じた磁力により前記パイロットクラッチに付与される押付力と、の積を含み、
前記メインクラッチの摩擦モデルは、前記インナメインクラッチ板と前記アウタメインクラッチ板との相対的な角速度差に応じた摩擦係数と、前記メインクラッチに付与される軸方向の押付力と、の積を含む、請求項1の伝達トルク推定装置。 - 前記メインクラッチに付与される軸方向の押付力は、前記カム動作モデルと、前記メインクラッチにおける軸方向の粘弾性モデルと、を含むモデルにより示される、請求項2の伝達トルク推定装置。
- 前記メインクラッチにおいて、前記アウタメインクラッチ板には前記外側回転部材とスプライン嵌合するスプライン部が形成され、前記インナメインクラッチ板には前記内側回転部材とスプライン嵌合するスプライン部が形成され、
前記第五モデルは、前記メインクラッチにおける各前記スプライン部と相手部材との軸方向の摩擦モデルをそれぞれ含む、請求項1〜3の何れか一項の伝達トルク推定装置。 - 前記メインクラッチにおいて、前記アウタメインクラッチ板には前記外側回転部材とスプライン嵌合するスプライン部が形成され、前記インナメインクラッチ板には前記内側回転部材とスプライン嵌合するスプライン部が形成され、
前記第一モデルおよび前記第三モデルは、前記メインクラッチにおける前記スプライン部と相手部材との回転方向のバックラッシをそれぞれ含むようにモデリングされている、請求項1〜4の何れか一項の伝達トルク推定装置。 - 前記支持側カム部材と前記移動側カム部材に位相差がない状態において、前記メインクラッチと前記移動側カム部材との間には所定量のクリアランスが設けられ、
前記メインクラッチの摩擦モデルは、前記クリアランスを含むようにモデリングされている、請求項1〜5の何れか一項の伝達トルク推定装置。 - 前記支持側カム部材と前記移動側カム部材に位相差がない状態において、前記メインクラッチと前記移動側カム部材との間には所定量のクリアランスが設けられ、
前記第五モデルは、前記クリアランスを含むようにモデリングされている、請求項1〜6の何れか一項の伝達トルク推定装置。 - 前記メインクラッチの摩擦モデルは、前記メインクラッチの軸方向の変形量を示す剛性モデルを含む、請求項1〜7の何れかの伝達トルク推定装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012247899A JP6020060B2 (ja) | 2012-11-09 | 2012-11-09 | 伝達トルク推定装置 |
| US14/071,852 US9395254B2 (en) | 2012-11-09 | 2013-11-05 | Transmission torque estimation unit |
| EP13191526.6A EP2730812A3 (en) | 2012-11-09 | 2013-11-05 | Transmission torque estimation unit |
| KR1020130135384A KR20140060245A (ko) | 2012-11-09 | 2013-11-08 | 전달 토크 추정 장치 |
| CN201310552647.0A CN103807426B (zh) | 2012-11-09 | 2013-11-08 | 传递扭矩推定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012247899A JP6020060B2 (ja) | 2012-11-09 | 2012-11-09 | 伝達トルク推定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014095444A JP2014095444A (ja) | 2014-05-22 |
| JP6020060B2 true JP6020060B2 (ja) | 2016-11-02 |
Family
ID=49546281
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012247899A Expired - Fee Related JP6020060B2 (ja) | 2012-11-09 | 2012-11-09 | 伝達トルク推定装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9395254B2 (ja) |
| EP (1) | EP2730812A3 (ja) |
| JP (1) | JP6020060B2 (ja) |
| KR (1) | KR20140060245A (ja) |
| CN (1) | CN103807426B (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6149948B1 (ja) * | 2016-01-07 | 2017-06-21 | 株式会社明電舎 | 供試体特性推定方法及び供試体特性推定装置 |
| JP6926854B2 (ja) * | 2017-09-06 | 2021-08-25 | 株式会社ジェイテクト | 駆動力伝達制御装置 |
| JP6645525B2 (ja) * | 2018-02-23 | 2020-02-14 | 株式会社明電舎 | 試験システムの制御装置 |
| JP6907993B2 (ja) * | 2018-04-19 | 2021-07-21 | トヨタ自動車株式会社 | 回転体の作用力検出装置 |
| CN112352114B (zh) * | 2018-07-02 | 2022-02-15 | 吉凯恩汽车有限公司 | 摩擦离合器装置 |
| CN108915929B (zh) * | 2018-09-18 | 2024-08-02 | 国家电网有限公司 | 输出可控的水轮机传动机构 |
| CN111859661B (zh) * | 2020-07-17 | 2023-07-14 | 西门子(中国)有限公司 | 压力机偏心机构的惯量确定方法 |
| CN114348784B (zh) * | 2022-01-05 | 2024-05-07 | 中国航空制造技术研究院 | 一种扭矩传递器及放丝束机构 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10331873A (ja) * | 1997-05-30 | 1998-12-15 | Toyoda Mach Works Ltd | 駆動力伝達装置 |
| US6123183A (en) * | 1997-11-26 | 2000-09-26 | Ntn Corporation | Rotation transmission device |
| JP4048701B2 (ja) * | 2000-08-01 | 2008-02-20 | 株式会社ジェイテクト | 駆動力伝達装置 |
| JP2006226316A (ja) * | 2005-02-15 | 2006-08-31 | Hitachi Ltd | 自動車の制御装置及び制御方法 |
| JP5161644B2 (ja) * | 2008-04-25 | 2013-03-13 | ヤマハ発動機株式会社 | 変速制御装置、鞍乗型車両、及び変速制御方法 |
| JP5390886B2 (ja) * | 2009-03-02 | 2014-01-15 | Gknドライブラインジャパン株式会社 | 動力伝達装置 |
| JP2010242830A (ja) * | 2009-04-03 | 2010-10-28 | Jtekt Corp | 電磁クラッチ |
| JP5645414B2 (ja) * | 2010-02-03 | 2014-12-24 | 本田技研工業株式会社 | クラッチ制御装置 |
| JP5668398B2 (ja) | 2010-08-30 | 2015-02-12 | 株式会社ジェイテクト | 駆動力伝達装置及び車両 |
-
2012
- 2012-11-09 JP JP2012247899A patent/JP6020060B2/ja not_active Expired - Fee Related
-
2013
- 2013-11-05 US US14/071,852 patent/US9395254B2/en active Active
- 2013-11-05 EP EP13191526.6A patent/EP2730812A3/en not_active Withdrawn
- 2013-11-08 KR KR1020130135384A patent/KR20140060245A/ko not_active Withdrawn
- 2013-11-08 CN CN201310552647.0A patent/CN103807426B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN103807426B (zh) | 2017-08-15 |
| JP2014095444A (ja) | 2014-05-22 |
| US20140136124A1 (en) | 2014-05-15 |
| CN103807426A (zh) | 2014-05-21 |
| EP2730812A3 (en) | 2018-04-18 |
| US9395254B2 (en) | 2016-07-19 |
| EP2730812A2 (en) | 2014-05-14 |
| KR20140060245A (ko) | 2014-05-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6020060B2 (ja) | 伝達トルク推定装置 | |
| CN105644361B (zh) | 四轮驱动车的控制装置 | |
| US9080614B2 (en) | Clutch plate, clutch unit and driving force transmission system | |
| US11608879B2 (en) | Disconnector apparatus | |
| JP6926853B2 (ja) | 駆動力伝達制御装置 | |
| CN103867592B (zh) | 用于机动车辆的扭矩传输安排 | |
| JP7358899B2 (ja) | 車両用駆動装置 | |
| WO2009038909A1 (en) | Controlled differntial actuator | |
| JP2019105370A (ja) | 車両差動装置のための電磁アクチュエータ | |
| CN108691925B (zh) | 扭矩限制器 | |
| EP3221609B1 (en) | A method to control clutch force in a clutch pack | |
| KR101260762B1 (ko) | 차동 제한장치 | |
| JP2013087834A (ja) | 駆動力伝達装置 | |
| JP2011122679A (ja) | 電磁クラッチ | |
| EP1760348A2 (en) | Driving force transmitting apparatus | |
| JP2015090166A (ja) | 駆動力伝達装置 | |
| KR101421016B1 (ko) | 차동 제한장치 | |
| JP2015017669A (ja) | 電磁クラッチ装置及び駆動力伝達装置 | |
| JP6069954B2 (ja) | 駆動力伝達装置およびその製造方法 | |
| JP2011122680A (ja) | 電磁クラッチ | |
| JP2011017395A (ja) | トルク伝達装置 | |
| JP4192955B2 (ja) | 駆動力伝達装置 | |
| JP7020884B2 (ja) | 電磁式アクチュエータ | |
| JP2009250383A (ja) | 電磁クラッチ、電磁クラッチの製造方法及び駆動力伝達装置 | |
| JP2006342941A (ja) | 駆動力伝達装置の取付構造 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151021 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160826 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160906 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160919 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6020060 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |