JP6036622B2 - 多段プレス装置の収納式架台 - Google Patents
多段プレス装置の収納式架台 Download PDFInfo
- Publication number
- JP6036622B2 JP6036622B2 JP2013193218A JP2013193218A JP6036622B2 JP 6036622 B2 JP6036622 B2 JP 6036622B2 JP 2013193218 A JP2013193218 A JP 2013193218A JP 2013193218 A JP2013193218 A JP 2013193218A JP 6036622 B2 JP6036622 B2 JP 6036622B2
- Authority
- JP
- Japan
- Prior art keywords
- press
- retractable
- multistage
- press apparatus
- stage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Landscapes
- Press Drives And Press Lines (AREA)
Description
また、足場を形成する点検装置としては、例えば、特許文献1に開示されたものがある。この点検装置においては、柱材にフレーム部を設け、フレーム部に隣接して展開及び収納可能に形成された複数の足場部材を設けることが開示されている。
該収納式架台は、上記多段プレス装置に隣接して設置する固定フレームと、該固定フレームに配設され、水平方向に伸縮可能な状態で互いに連結された複数の移動床とを備えており、
該複数の移動床は、上記多段プレス装置の稼動時に、上記ワークの出し入れが行われるワーク搬送領域から退避して上下に重なる状態で収納される収納状態と、上記多段プレス装置の停止時に、上記ワーク搬送領域において水平方向に広がって上記高所点検作業を行う際の足場を形成する足場状態とに切り換えられるよう構成されていることを特徴とする多段プレス装置の収納式架台にある。
多段プレス装置の稼動時においては、複数の移動床を収納状態にし、収納式架台が搬送ロボットの障害にならないようにする。また、多段プレス装置の停止時において、多段プレス装置の高所点検作業を行う際には、複数の移動床を足場状態にし、作業者が利用する足場を形成する。
これにより、多段プレス装置の稼動時には、収納式架台が搬送ロボットの障害にならず、多段プレス装置の停止時に高所点検作業を行う際には、収納式架台によって作業者の足場を迅速に形成することができる。
上記多段プレス装置の収納式架台において、上記多段プレス装置における高所点検作業には、上記複数のプレス型のうち、作業者の手が届かない高所にあるプレス型の上型及び下型のメンテナンス作業、清掃作業等が含まれる。
この場合には、多段プレス装置の両側において、ワークの出し入れを可能にするとともに、収納式架台による高所点検作業を可能にすることができる。
この場合には、複数の移動床を伸縮させる機構を、水平フレーム部に配設して容易に形成することができる。
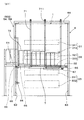
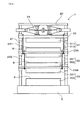
本例の多段プレス装置1の収納式架台5A,5Bは、図1〜図3に示すごとく、上型311,321,331及び下型312,322,332からなるプレス型31,32,33が鉛直方向に複数連なって構成された多段プレス装置1と、複数のプレス型31,32,33に対してワーク8の出し入れを行う搬送ロボット4A,4B,4Cとの間に配設され、多段プレス装置1における高所点検作業を行う際の足場を形成するものである。収納式架台5A,5Bは、多段プレス装置1に隣接して設置する固定フレーム6と、固定フレーム6に配設され、水平方向に伸縮可能な状態で互いに連結された複数の移動床7とを備えている。複数の移動床7は、図5、図6に示すごとく、多段プレス装置1の稼動時に、ワーク8の出し入れが行われるワーク搬送領域X1,X2から退避して上下に重なる状態で収納される収納状態501と、図1、図2に示すごとく、多段プレス装置1の停止時に、ワーク搬送領域X1,X2において水平方向に広がって高所点検作業を行う際の足場を形成する足場状態502とに切り換えられるよう構成されている。
図4に示すごとく、多段プレス装置1は、複数のプレス型31,32,33の上型311,321,331と下型312,322,332との間にそれぞれワーク8を挟み込んで、複数のワーク8に同時にプレス加工を行う。複数のプレス型31,32,33は、プレス加工を段階的に行う複数の工程のうちの各工程ごとのプレス加工を行うよう形成されている。本例の複数のプレス型31,32,33は、鉛直方向に3段に重なって配置されており、多段プレス装置1においては3つのプレス加工の工程が行われる。
図5に示すごとく、多段プレス装置1に搬入されるワーク8は、各搬送ロボット4A,4B,4Cによって複数のプレス型31,32,33に順次移載され、多段プレス装置1から搬出される。
本例の収納式架台5A,5Bは、多段プレス装置1の稼動時においても、多段プレス装置1に隣接して設置したままの状態にできるものである。
図5、図6に示すごとく、多段プレス装置1の稼動時においては、各収納式架台5A,5Bの複数の移動床7を収納状態501にし、各収納式架台5A,5Bが、各プレス型31,32,33との間でワーク8を出し入れする各搬送ロボット4A,4B,4Cの障害にならないようにする。このとき、複数の移動床7の全体は、多段プレス装置1の側方に位置する固定床61に対して上下に重なって収納される。そして、多段プレス装置1のワーク搬送領域X1,X2には、水平フレーム部62が常時配置されている。ただし、この水平フレーム部62は、各搬送ロボット4A,4B,4Cが各プレス型31,32,33との間でワーク8の出し入れを行う際に、各搬送ロボット4A,4B,4Cの障害にならない。このように、多段プレス装置1の稼動時においては、複数の移動床7が、多段プレス装置1の両側に形成されたワーク搬送領域X1,X2から退避する。
それ故、本例の多段プレス装置1の収納式架台5A,5Bによれば、多段プレス装置1の稼動時には、収納式架台5A,5Bが搬送ロボット4A,4B,4Cの障害にならず、多段プレス装置1の停止時に高所点検作業を行う際には、収納式架台5A,5Bによって作業者の足場を迅速に形成することができる。
31 最上段のプレス型
32 中段のプレス型
33 最下段のプレス型
4A,4B,4C 搬送ロボット
5A,5B 収納式架台
501 収納状態
502 足場状態
6 固定フレーム
62 水平フレーム部
65 ワイヤ
7 移動床
X1,X2 ワーク搬送領域
Claims (3)
- 上型及び下型からなるプレス型が鉛直方向に複数連なって構成された多段プレス装置と、上記複数のプレス型に対してワークの出し入れを行う搬送ロボットとの間に配設され、上記多段プレス装置における高所点検作業を行う際の足場を形成する収納式架台であって、
該収納式架台は、上記多段プレス装置に隣接して設置する固定フレームと、該固定フレームに配設され、水平方向に伸縮可能な状態で互いに連結された複数の移動床とを備えており、
該複数の移動床は、上記多段プレス装置の稼動時に、上記ワークの出し入れが行われるワーク搬送領域から退避して上下に重なる状態で収納される収納状態と、上記多段プレス装置の停止時に、上記ワーク搬送領域において水平方向に広がって上記高所点検作業を行う際の足場を形成する足場状態とに切り換えられるよう構成されていることを特徴とする多段プレス装置の収納式架台。 - 上記搬送ロボットは、上記多段プレス装置の両側から上記ワークの出し入れを行うよう、上記多段プレス装置の両側に対向して配設されており、
上記ワーク搬送領域は、上記多段プレス装置の両側に形成されており、
上記収納式架台は、上記両側の搬送ロボットと上記多段プレス装置との間にそれぞれ配設されていることを特徴とする請求項1に記載の多段プレス装置の収納式架台。 - 上記固定フレームは、上記ワーク搬送領域に、水平方向に伸びる水平フレーム部を配置して形成されており、
上記複数の移動床は、上記水平フレーム部に設けられた複数の滑車に掛け渡されたワイヤの移動によって水平方向に伸縮するよう構成されていることを特徴とする請求項1又は2に記載の多段プレス装置の収納式架台。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013193218A JP6036622B2 (ja) | 2013-09-18 | 2013-09-18 | 多段プレス装置の収納式架台 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013193218A JP6036622B2 (ja) | 2013-09-18 | 2013-09-18 | 多段プレス装置の収納式架台 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015058445A JP2015058445A (ja) | 2015-03-30 |
| JP6036622B2 true JP6036622B2 (ja) | 2016-11-30 |
Family
ID=52816405
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013193218A Active JP6036622B2 (ja) | 2013-09-18 | 2013-09-18 | 多段プレス装置の収納式架台 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6036622B2 (ja) |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5220894Y2 (ja) * | 1971-12-15 | 1977-05-13 | ||
| JPH0423277U (ja) * | 1990-06-12 | 1992-02-26 | ||
| JP2001138797A (ja) * | 1999-11-16 | 2001-05-22 | Hankyu Corp | 高所作業車 |
| JP2007029960A (ja) * | 2005-07-22 | 2007-02-08 | Toyota Auto Body Co Ltd | プレス装置 |
| JP5157674B2 (ja) * | 2008-06-24 | 2013-03-06 | トヨタ車体株式会社 | 多段プレス装置 |
-
2013
- 2013-09-18 JP JP2013193218A patent/JP6036622B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015058445A (ja) | 2015-03-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111164029B (zh) | 一种自动化存储和取出系统 | |
| JP2004168440A (ja) | 物品の段積み、段ばらし装置 | |
| KR102092727B1 (ko) | 족장 해체 보조 장치 및 방법 | |
| CN114364489B (zh) | 包含至少两个联动卧式加工中心的单元及操作其的方法 | |
| JP6036622B2 (ja) | 多段プレス装置の収納式架台 | |
| KR102105675B1 (ko) | 고소 작업용 승강작업대 | |
| KR20170000845A (ko) | 다방향 작업이 가능한 작업설비 | |
| JP6746905B2 (ja) | ワーク搬送システム、レーザ加工システム、及びワーク搬送方法 | |
| JP2016016421A (ja) | 型交換台、多層加工システム、及び型交換方法 | |
| CN104649195B (zh) | 一种钢管捆扎前的码垛成型装置 | |
| JP5060139B2 (ja) | タンデムプレス加工装置 | |
| EP3272682B1 (en) | Pallet handling device, palletizing apparatus and pallet handling method | |
| JP2013067515A (ja) | 複合搬送装置及びそれを用いた方法 | |
| JP6080741B2 (ja) | 重量物運搬方法、及び重量物運搬装置 | |
| CN109702703B (zh) | 储罐总装用工装平台 | |
| JP6323875B2 (ja) | 多層加工機 | |
| JP2006159271A (ja) | 板曲げプレスにおける板材の配置方法 | |
| KR20190037971A (ko) | 벽돌 인양기 | |
| JP2017177306A (ja) | 船舶用プレハブキャビンの製造装置 | |
| JP2002249204A (ja) | 高層収納棚及びそのメンテナンス方法 | |
| JP2005053611A (ja) | 架台への重量物収納又は取り出し方法及びこれらに使用する重量物据付冶具 | |
| CN109317868B (zh) | 用于管道加工的工装 | |
| JP6186383B2 (ja) | 原子炉格納容器内ポーラクレーンへの補助トロリの据付方法 | |
| JP2016041782A (ja) | コークス炉の構築方法 | |
| CN212982418U (zh) | 一种物流仓储用升降稳定机构 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151201 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160927 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161004 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161017 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6036622 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |