JP6059846B2 - 鉱山用作業機械の制御システム、鉱山用作業機械、鉱山用作業機械の管理システム、鉱山用作業機械の制御方法及びプログラム - Google Patents
鉱山用作業機械の制御システム、鉱山用作業機械、鉱山用作業機械の管理システム、鉱山用作業機械の制御方法及びプログラム Download PDFInfo
- Publication number
- JP6059846B2 JP6059846B2 JP2016504235A JP2016504235A JP6059846B2 JP 6059846 B2 JP6059846 B2 JP 6059846B2 JP 2016504235 A JP2016504235 A JP 2016504235A JP 2016504235 A JP2016504235 A JP 2016504235A JP 6059846 B2 JP6059846 B2 JP 6059846B2
- Authority
- JP
- Japan
- Prior art keywords
- work machine
- map information
- dump truck
- detected
- mine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



















Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
- E02F9/205—Remotely operated machines, e.g. unmanned vehicles
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
- E02F9/261—Surveying the work-site to be treated
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3833—Creation or updating of map data characterised by the source of data
- G01C21/3837—Data obtained from a single source
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/86—Combinations of radar systems with non-radar systems, e.g. sonar, direction finder
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/86—Combinations of radar systems with non-radar systems, e.g. sonar, direction finder
- G01S13/865—Combination of radar systems with lidar systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/396—Determining accuracy or reliability of position or pseudorange measurements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/45—Determining position by combining measurements of signals from the satellite radio beacon positioning system with a supplementary measurement
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/48—Determining position by combining or switching between position solutions derived from the satellite radio beacon positioning system and position solutions derived from a further system
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/096805—Systems involving transmission of navigation instructions to the vehicle where the transmitted instructions are used to compute a route
- G08G1/096827—Systems involving transmission of navigation instructions to the vehicle where the transmitted instructions are used to compute a route where the route is computed onboard
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/20—Monitoring the location of vehicles belonging to a group, e.g. fleet of vehicles, countable or determined number of vehicles
- G08G1/202—Dispatching vehicles on the basis of a location, e.g. taxi dispatching
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/20—Monitoring the location of vehicles belonging to a group, e.g. fleet of vehicles, countable or determined number of vehicles
- G08G1/207—Monitoring the location of vehicles belonging to a group, e.g. fleet of vehicles, countable or determined number of vehicles with respect to certain areas, e.g. forbidden or allowed areas with possible alerting when inside or outside boundaries
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/43—Determining position using carrier phase measurements, e.g. kinematic positioning; using long or short baseline interferometry
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
- G01S2013/93271—Sensor installation details in the front of the vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
- G01S2013/93275—Sensor installation details in the bumper area
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Electromagnetism (AREA)
- Automation & Control Theory (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Mining & Mineral Resources (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Radar Systems Or Details Thereof (AREA)
Description
<作業機械の管理システムの概要>
図1は、実施形態1に係る作業機械の管理システムの一例を示す図である。
次に、管制施設7に配置される管理装置10について説明する。管理装置10は、ダンプトラック2の作業機械の制御システム30に鉱山に設けられる走行経路RPを指定する情報である走行経路情報を送信するものであり、図1に示すように、コンピュータ11と、表示装置16と、入力装置17と、無線通信装置18と、GPS基地局19と、を備えている。
次に、他の作業機械3について説明する。実施形態1において、他の作業機械3は、ダンプトラック2以外の作業機械であり、作業者の操作により駆動する。他の作業機械3は、CPU(Central Processing Unit)を含みかつ作業内容に関する各種の処理を実行する処理装置と、GPS位置を検出するGPS受信器と、管制施設7の無線通信装置18と情報を送受信する無線通信装置と、を少なくとも備える。他の作業機械3は、所定時間毎にGPS位置を無線通信装置が管制施設7の無線通信装置18に送信する。
次に、ダンプトラック2について説明する。図2は、実施形態1に係るダンプトラックの制御ブロック図である。図3は、実施形態1に係るダンプトラックのハードウエア構成図である。図4は、実施形態1に係るダンプトラックの障害物センサの正面図である。図5は、図4に示された障害物センサのレーザーセンサの検出範囲を示す平面図である。図6は、図4に示されたレーザーセンサの検出範囲を示す側面図である。
次に、作業機械の制御システムを説明する。図7は、実施形態1に係る作業機械の制御システムの走行コントローラが位置及び方位を特定する方法を説明する図である。図8は、実施形態1に係る作業機械の制御システムの位置計測コントローラの照合航法演算部が位置及び方位を特定する方法を説明する図である。図9は、実施形態1に係る作業機械の制御システムのマップ保存用データベースに記憶される地図情報の一部を示す図である。図10は、図9中のXIV部を拡大して示す図である。
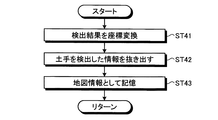
次に、実施形態1に係る作業機械の制御方法、即ち作業機械の制御システム30の動作の一例について説明する。図11は、実施形態1に係る作業機械の制御システムのフローチャートの一例である。図12は、図11のステップST4のフローチャートの一例である。図13は、図12のステップST42のフローチャートの一例である。図14は、図11のステップST6のフローチャートの一例である。図15は、図14のステップST64のフローチャートの一例である。図16は、実施形態1に係る作業機械の制御システムの照合航法演算部が検出した各位置及び方位の予想される検出結果の一例を示す図である。図17は、実施形態1に係る作業機械の制御システムのレーザーセンサが現実に検出した検出結果の一例を示す図である。図18は、実施形態1に係る作業機械の制御システムの位置計測コントローラの照合航法演算部が最も近い検出結果を算出した状態の一例を示す図である。
<作業機械の制御方法>
次に、実施形態2に係る作業機械の制御方法、即ち作業機械の制御システム30の動作の一例について説明する。図19は、実施形態2に係る作業機械の制御システムのフローチャートの一例である。図20は、図19のステップST7のフローチャートの一例である。なお、図19及び図20において、実施形態1と同一部分には、同一符号を付して説明を省略する。実施形態2の作業機械の制御システム30は、実施形態1の作業機械の制御システム30と構成が等しい。
2 ダンプトラック(作業機械)
7 管制施設
10 管理装置
20 走行コントローラ(走行制御手段)
21 車両本体
24A レーダー(非接触センサ)
24B レーザーセンサ(非接触センサ)
27 速度センサ
30 作業機械の制御システム
31 GPS受信器(位置検出手段)
32A 経路位置記憶部(経路位置記憶手段)
33 位置計測コントローラ(計測出力手段)
33A 判定部(判定手段)
RP 走行経路
VP 上方突出物
BK 土手
MI 地図情報
Claims (11)
- 鉱山の走行経路を走行する鉱山用作業機械の制御システムであって、
前記作業機械の位置を検出する位置検出手段と、
前記作業機械の周囲の物体の位置を検出する非接触センサと、
前記位置検出手段の検出結果及び前記非接触センサの検出結果から上方に突出した上方突出物の位置を検出し、検出した前記上方突出物の位置を地図情報として地図情報記憶手段に記憶する計測出力手段と、を備え、
前記計測出力手段は、
前記作業機械の状態が前記地図情報の精度を低下させる状態であるか否かを判定し、
前記作業機械の状態が前記地図情報の精度を低下させる状態であると判定した場合に、前記地図情報の記憶を休止する鉱山用作業機械の制御システム。 - 前記鉱山の走行経路を指定する情報を記憶する経路位置記憶手段と、
前記位置検出手段が検出した位置の誤差が所定の誤差以下であるか否かを判定する判定手段と、
前記位置検出手段が検出した位置の誤差が前記所定の誤差以下であると前記判定手段が判定すると、前記位置検出手段が検出した前記作業機械の位置に基づいて、前記経路位置記憶手段が記憶した前記鉱山の走行経路に従って前記作業機械を走行させる走行制御手段と、を備える請求項1に記載の鉱山用作業機械の制御システム。 - 前記計測出力手段は、前記位置検出手段が検出した位置の誤差が前記所定の誤差を超えていると前記判定手段が判定すると、前記非接触センサの検出結果と前記地図情報記憶手段が記憶した前記鉱山の走行経路の地図情報とを照合することにより前記作業機械の位置を特定し、
前記走行制御手段は、前記計測出力手段が特定した前記作業機械の位置に基づいて、前記経路位置記憶手段が記憶した前記鉱山の走行経路に従って前記作業機械を走行させる請求項2に記載の鉱山用作業機械の制御システム。 - 前記計測出力手段は、
前記作業機械の状態が位置計測精度を低下させる状態であるか否かを判定し、
前記作業機械の状態が位置計測精度を低下させる状態であると判定した場合に、前記非接触センサの検出結果と前記地図情報記憶手段が記憶した前記地図情報とを照合することにより前記作業機械の位置を特定することを休止する請求項3に記載の鉱山用作業機械の制御システム。 - 前記計測出力手段は、前記位置検出手段が検出した位置の誤差が前記所定の誤差以下であると前記判定手段が判定した場合に、前記非接触センサの検出結果と前記地図情報記憶手段が記憶した前記地図情報とを照合することにより前記作業機械の位置を特定して、前記鉱山の走行経路に従って前記計測出力手段が特定した前記作業機械の位置に基づいて前記作業機械を走行させることが適しているか否かを判定する請求項2から請求項4のうちいずれか一項に記載の鉱山用作業機械の制御システム。
- 前記計測出力手段は、前記位置検出手段が検出した位置の誤差が前記所定の誤差以下であると前記判定手段が判定した場合に、前記非接触センサの検出結果と前記地図情報記憶手段が記憶した前記地図情報とを照合することにより得られた前記作業機械の位置と、前記位置検出手段が検出した位置との距離を検出し、記憶する請求項5に記載の鉱山用作業機械の制御システム。
- 前記作業機械の状態が前記地図情報の精度を低下させる状態は、前記作業機械の停車時、前記位置検出手段の精度低下時を含む、請求項1から6のうちいずれか一項に記載の鉱山用作業機械の制御システム。
- 請求項1から請求項7のうちいずれか一項に記載の鉱山用作業機械の制御システムと、
鉱山に設けられる走行経路を走行する車両本体と、を備える鉱山用作業機械。 - 請求項8に記載の鉱山用作業機械と、
鉱山に設置される管制施設に配置され、かつ前記作業機械の鉱山用作業機械の制御システムに鉱山に設けられる走行経路を指定する情報を送信する管理装置と、を備える鉱山用作業機械の管理システム。 - 鉱山の走行経路を走行する鉱山用作業機械の制御方法であって、
前記作業機械が前記鉱山の走行経路に従って走行する際に、前記作業機械の位置及び前記作業機械の周囲の物体の位置を検出する非接触センサの検出結果から上方に突出した上方突出物の位置を検出し、検出した前記上方突出物の位置を前記鉱山の走行経路の地図情報として記憶するとともに、前記作業機械の状態が前記地図情報の精度を低下させる状態である場合に、前記鉱山の走行経路の地図情報の記憶を休止する鉱山用作業機械の制御方法。 - 鉱山の走行経路を走行する鉱山用作業機械に設置されたコンピュータに、
前記作業機械が前記鉱山の走行経路に従って走行する際に、前記作業機械の状態が上方に突出した上方突出物の位置を示す前記鉱山の走行経路の地図情報の精度を低下させる状態であるか否かを判定するステップと、
前記作業機械の状態が前記地図情報の精度を低下させる状態ではないと判定すると、前記作業機械の位置及び前記作業機械の周囲の物体の位置を検出する非接触センサの検出結果から前記上方突出物の位置を検出し、検出した前記上方突出物の位置を前記鉱山の走行経路の地図情報として地図情報記憶手段に記憶するステップと、
前記作業機械の状態が前記地図情報の精度を低下させる状態であると判定すると、前記鉱山の走行経路の地図情報の記憶を休止するステップと、
を実行させるプログラム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2015/080866 WO2016060282A1 (ja) | 2015-10-30 | 2015-10-30 | 作業機械の制御システム、作業機械、作業機械の管理システム、作業機械の制御方法及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6059846B2 true JP6059846B2 (ja) | 2017-01-11 |
| JPWO2016060282A1 JPWO2016060282A1 (ja) | 2017-04-27 |
Family
ID=55746811
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016504235A Active JP6059846B2 (ja) | 2015-10-30 | 2015-10-30 | 鉱山用作業機械の制御システム、鉱山用作業機械、鉱山用作業機械の管理システム、鉱山用作業機械の制御方法及びプログラム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10026308B2 (ja) |
| JP (1) | JP6059846B2 (ja) |
| CN (1) | CN105849586B (ja) |
| AU (1) | AU2015331288B2 (ja) |
| CA (1) | CA2941227C (ja) |
| WO (1) | WO2016060282A1 (ja) |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017109977A1 (ja) * | 2015-12-25 | 2017-06-29 | 株式会社小松製作所 | 作業機械の制御システム、作業機械、作業機械の管理システム、及び作業機械の管理方法 |
| US10031528B2 (en) * | 2016-02-01 | 2018-07-24 | Komatsu Ltd. | Work machine control system, work machine, and work machine management system |
| CA2942553C (en) * | 2016-02-01 | 2018-10-02 | Komatsu Ltd. | Work machine control system, work machine, and work machine management system |
| US20180018880A1 (en) * | 2016-07-12 | 2018-01-18 | Caterpillar Inc. | System and method for worksite route management |
| JP6973393B2 (ja) * | 2016-07-29 | 2021-11-24 | 日本電産株式会社 | 移動体誘導システム、移動体、誘導装置およびコンピュータプログラム |
| JP7089954B2 (ja) * | 2017-06-30 | 2022-06-23 | 酒井重工業株式会社 | 建設車両の障害物検知装置 |
| US10733420B2 (en) * | 2017-11-21 | 2020-08-04 | GM Global Technology Operations LLC | Systems and methods for free space inference to break apart clustered objects in vehicle perception systems |
| JP6900897B2 (ja) * | 2017-12-25 | 2021-07-07 | コベルコ建機株式会社 | 建設機械の障害物検出装置 |
| CN108104192A (zh) * | 2018-01-10 | 2018-06-01 | 深圳市晟达机械设计有限公司 | 一种地下铲运机 |
| JP6923455B2 (ja) * | 2018-01-12 | 2021-08-18 | 株式会社日立産機システム | 位置検出システム |
| CN108337787B (zh) * | 2018-02-07 | 2020-04-14 | 江西电力职业技术学院 | 自动管控系统及方法 |
| US10935670B2 (en) * | 2018-03-28 | 2021-03-02 | Psionic, Llc | Navigation system for GPS denied environments |
| US10404261B1 (en) * | 2018-06-01 | 2019-09-03 | Yekutiel Josefsberg | Radar target detection system for autonomous vehicles with ultra low phase noise frequency synthesizer |
| JP7141883B2 (ja) * | 2018-07-31 | 2022-09-26 | 株式会社小松製作所 | 作業機械の制御システム、作業機械、及び作業機械の制御方法 |
| JP7195883B2 (ja) * | 2018-11-08 | 2022-12-26 | 株式会社Ihiエアロスペース | 無人移動体及び無人移動体の制御方法 |
| CN109763824A (zh) * | 2019-01-24 | 2019-05-17 | 本钢板材股份有限公司 | 一种卫星定位动态配矿方法 |
| CN110298536A (zh) * | 2019-05-20 | 2019-10-01 | 北京讯腾智慧科技股份有限公司 | 燃气管线数据质量评判方法、装置和数据采集方法 |
| WO2020250020A1 (en) * | 2019-06-14 | 2020-12-17 | Kpit Technologies Limited | Lidar and radar based tracking and mapping system and method thereof |
| JP7196789B2 (ja) * | 2019-07-02 | 2022-12-27 | 株式会社デンソー | 車載センサ装置 |
| WO2021102336A1 (en) * | 2019-11-20 | 2021-05-27 | Autonomous Solutions, Inc. | Truck load dumping for an autonomous loader |
| US11274930B1 (en) * | 2019-12-11 | 2022-03-15 | Amazon Technologies, Inc. | System for assessing an autonomously determined map |
| US11945439B2 (en) | 2020-02-27 | 2024-04-02 | Volvo Truck Corporation | AD or ADAS aided maneuvering of a vehicle |
| JP7383546B2 (ja) * | 2020-03-27 | 2023-11-20 | 株式会社東芝 | 位置情報処理システム、位置情報処理装置と処理方法 |
| JP7629707B2 (ja) * | 2020-10-28 | 2025-02-14 | 株式会社日立製作所 | 測位方法 |
| WO2022186103A1 (ja) * | 2021-03-02 | 2022-09-09 | パイオニア株式会社 | 情報処理装置、情報処理方法、プログラム及び記憶媒体 |
| FR3124606B1 (fr) | 2021-06-10 | 2023-07-07 | Aximum | Procédé de détermination d’une position d’un engin de chantier ou d’un engin agricole, et procédé de pilotage de cet engin |
| CN114325755B (zh) * | 2021-11-26 | 2023-08-01 | 江苏徐工工程机械研究院有限公司 | 一种适用于自动驾驶车辆的挡土墙检测方法及系统 |
| AU2022474963A1 (en) * | 2022-08-17 | 2025-02-13 | Epiroc Rock Drills Aktiebolag | Method and arrangement for localization of a work machine |
| JP2024052332A (ja) * | 2022-09-30 | 2024-04-11 | 株式会社小松製作所 | 作業現場の検出システム及び作業現場の検出方法 |
| JP7665685B2 (ja) * | 2023-06-30 | 2025-04-21 | 株式会社ブロードリーフ | 移動制御装置、移動制御方法及び移動制御プログラム |
| KR20250147326A (ko) * | 2024-04-04 | 2025-10-13 | 주식회사 에이치엘클레무브 | 차량의 위치 측정 방법 및 장치 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5610815A (en) * | 1989-12-11 | 1997-03-11 | Caterpillar Inc. | Integrated vehicle positioning and navigation system, apparatus and method |
| US5646843A (en) * | 1990-02-05 | 1997-07-08 | Caterpillar Inc. | Apparatus and method for surface based vehicle control system |
| JP3848431B2 (ja) | 1997-04-28 | 2006-11-22 | 本田技研工業株式会社 | 車両位置推定装置と車両位置推定方法、および、走行車線維持装置と走行車線維持方法 |
| US6064926A (en) | 1997-12-08 | 2000-05-16 | Caterpillar Inc. | Method and apparatus for determining an alternate path in response to detection of an obstacle |
| US6501422B1 (en) * | 1998-08-19 | 2002-12-31 | Trimble Navigation, Ltd. | Precise parallel swathing guidance via satellite navigation and tilt measurement |
| JP4229358B2 (ja) * | 2001-01-22 | 2009-02-25 | 株式会社小松製作所 | 無人車両の走行制御装置 |
| US7266477B2 (en) * | 2005-06-22 | 2007-09-04 | Deere & Company | Method and system for sensor signal fusion |
| EP1924981B1 (en) * | 2005-07-26 | 2012-09-12 | MacDonald Dettwiler & Associates Inc. | Traffic management system for a passageway environment |
| US20100066587A1 (en) * | 2006-07-14 | 2010-03-18 | Brian Masao Yamauchi | Method and System for Controlling a Remote Vehicle |
| JP2010509585A (ja) * | 2006-11-06 | 2010-03-25 | テレ アトラス ベスローテン フエンノートシャップ | 2次元及び3次元の正確な場所及び方位を判定する装置及び方法 |
| JP2008116370A (ja) * | 2006-11-06 | 2008-05-22 | Toyota Motor Corp | 移動体位置測位装置 |
| US8554478B2 (en) * | 2007-02-23 | 2013-10-08 | Honeywell International Inc. | Correlation position determination |
| JP5503419B2 (ja) | 2010-06-03 | 2014-05-28 | 株式会社日立製作所 | 無人搬送車および走行制御方法 |
| US8996228B1 (en) * | 2012-09-05 | 2015-03-31 | Google Inc. | Construction zone object detection using light detection and ranging |
| CA2941226C (en) * | 2015-10-30 | 2018-10-02 | Komatsu Ltd. | Construction machine control system, construction machine, construction machine management system, and construction machine control method and program |
-
2015
- 2015-10-30 JP JP2016504235A patent/JP6059846B2/ja active Active
- 2015-10-30 US US15/122,729 patent/US10026308B2/en active Active
- 2015-10-30 AU AU2015331288A patent/AU2015331288B2/en active Active
- 2015-10-30 CA CA2941227A patent/CA2941227C/en active Active
- 2015-10-30 WO PCT/JP2015/080866 patent/WO2016060282A1/ja not_active Ceased
- 2015-10-30 CN CN201580002964.2A patent/CN105849586B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US10026308B2 (en) | 2018-07-17 |
| CN105849586B (zh) | 2018-11-09 |
| US20170124862A1 (en) | 2017-05-04 |
| AU2015331288A1 (en) | 2017-05-18 |
| CN105849586A (zh) | 2016-08-10 |
| WO2016060282A1 (ja) | 2016-04-21 |
| CA2941227C (en) | 2018-09-25 |
| JPWO2016060282A1 (ja) | 2017-04-27 |
| AU2015331288B2 (en) | 2017-08-17 |
| CA2941227A1 (en) | 2016-04-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6059846B2 (ja) | 鉱山用作業機械の制御システム、鉱山用作業機械、鉱山用作業機械の管理システム、鉱山用作業機械の制御方法及びプログラム | |
| JP6055120B2 (ja) | 作業機械の制御システム、作業機械、作業機械の管理システム、作業機械の制御方法及びプログラム | |
| JP6909726B2 (ja) | 作業機械の制御システム、作業機械、作業機械の管理システム、及び作業機械の管理方法 | |
| JP6267783B2 (ja) | 作業機械の制御システム、作業機械、及び作業機械の管理システム | |
| JP6475227B2 (ja) | 作業機械の制御システム、作業機械、及び作業機械の管理システム | |
| JP6617192B2 (ja) | 作業機械の管理システム、及び作業機械 | |
| US10520320B2 (en) | Management system for work machine, work machine, and management device for work machine | |
| CA2951515C (en) | Control system for work machine, work machine, and control method for work machine | |
| JP6757749B2 (ja) | 作業機械の管理システム、作業機械、作業機械の管理方法 | |
| JPWO2017130418A1 (ja) | 作業機械の管理システム及び作業機械 | |
| JP6538793B2 (ja) | 作業機械の制御システム、作業機械、及び作業機械の管理システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160518 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20160621 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20160712 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160719 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160916 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161122 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161209 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6059846 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |