JP6094863B2 - 画像処理装置、画像処理方法、プログラム、集積回路 - Google Patents
画像処理装置、画像処理方法、プログラム、集積回路 Download PDFInfo
- Publication number
- JP6094863B2 JP6094863B2 JP2012547388A JP2012547388A JP6094863B2 JP 6094863 B2 JP6094863 B2 JP 6094863B2 JP 2012547388 A JP2012547388 A JP 2012547388A JP 2012547388 A JP2012547388 A JP 2012547388A JP 6094863 B2 JP6094863 B2 JP 6094863B2
- Authority
- JP
- Japan
- Prior art keywords
- image data
- pixel
- depth
- pixels
- depth image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


























Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T15/00—Three-dimensional [3D] image rendering
- G06T15/08—Volume rendering
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T15/00—Three-dimensional [3D] image rendering
- G06T15/10—Geometric effects
- G06T15/20—Perspective computation
- G06T15/205—Image-based rendering
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/10—Processing, recording or transmission of stereoscopic or multi-view image signals
- H04N13/106—Processing image signals
- H04N13/111—Transformation of image signals corresponding to virtual viewpoints, e.g. spatial image interpolation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/10—Processing, recording or transmission of stereoscopic or multi-view image signals
- H04N13/106—Processing image signals
- H04N13/128—Adjusting depth or disparity
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Computer Graphics (AREA)
- General Physics & Mathematics (AREA)
- Computing Systems (AREA)
- Geometry (AREA)
- Image Processing (AREA)
- Testing, Inspecting, Measuring Of Stereoscopic Televisions And Televisions (AREA)
- Processing Or Creating Images (AREA)
Description
まず、本発明にかかる一態様の基礎となった知見について説明する。
発明者らは、以上の知見を基礎に、以下に示す発明の一態様を得るに至った。
以下では、本発明の実施の形態について、図面を参照しながら説明する。
実施の形態1にかかる画像処理装置は、デプス画像に基づき画像データを構成する各画素の座標を所定方向にシフトし、元の画像データとは異なる視点の画像データを生成するものであるが、画素シフト処理に際して、デプス画像のエッジ位置を後景側に移動させ、エッジ位置移動後のデプス画像を用いて画素シフト処理を行い、その後画素シフトにより生じた画素値が存在しない欠落領域を補間する点に特徴がある。画素シフト処理に際して、デプス画像のエッジ位置を後景側に移動させるので、画素欠落領域の両端の画素が後景オブジェクトの画素となり、画素欠落領域の補間による前景オブジェクトのぼけ、歪みを防ぐことが可能となる。
まず、実施の形態1にかかる画像処理装置100の構成について説明する。図1は、画像処理装置100の構成の一例を示すブロック図である。本図に示されるように、画像処理装置100は、デプス画像変換部101、画素シフト部102、画素補間部103を含んで構成される。以下、各構成部について説明する。
デプス画像変換部101は、入力されたデプス画像のエッジ位置を後景側に移動させる機能を有する。具体的には、水平方向に隣接する画素が有する奥行きの値が所定の閾値以上である画素位置をエッジ位置とし、そのエッジ位置を所定画素数、右方向に移動させる。
画素シフト部102は、デプス画像変換部101から出力されたデプス画像に基づき、入力された画像データを構成する各画素の座標を水平方向にシフトさせることにより、入力画像の視点位置に対して右方向に離れた視点位置の画像を生成する機能を有する。
画素補間部103は、画素シフト部102が出力した画素欠落領域フラグを受け付け、この画素欠落領域フラグにより示される画素欠落領域(オクルージョン)を補間する機能を有する。具体的には、画素欠落領域フラグにより画素欠落領域を特定し、画素欠落領域の近傍の画素を用いて、特定した画素欠落領域を線形補間する。
<視点画像生成処理>
まず、画像処理装置100による視点画像生成処理について説明する。図9は視点画像生成処理の流れを示すフローチャートである。本図に示されるように、デプス画像変換部101はデプス画像変換処理を行う(ステップS901)。デプス画像変換処理の詳細は後述する。次に、画素シフト部102は、シフト量の算出を行う(ステップS902)。具体的には、ステップS901で変換されたデプス画像に基づき、P=e(1−S/Z)の関係式を用いて、各画素のシフト量を算出する。そして、画素シフト部102は、算出したシフト量に基づき画素シフト処理を行い、R画像を生成する(ステップS903)。R画像の生成後、画素補間部103は、画素シフト処理により生じた画素欠落領域を線形補間する(ステップS904)。以上が、画像処理装置100による視点画像生成処理についての説明である。続いて、上記のステップS901のデプス画像変換処理の詳細について説明する。
図10は、デプス画像変換処理の流れを示すフローチャートである。本図に示されるように、デプス画像変換部101はまず、処理画素位置の奥行きの値(A)を入力されたデプス画像から取得する(ステップS1001)。次にデプス画像変換部101は、処理画素位置の左1画素となりの奥行きの値(B)を入力されたデプス画像から取得する(ステップS1002)。
(左視点画像の生成について)
上記実施の形態では、入力画像を左視点画像(L画像)とし、画素シフトにより右視点画像(R画像)を生成する場合を説明したが、本発明は必ずしもこの場合に限定されない。入力画像を右視点画像とし、画素シフトにより左視点画像を生成してもよい。この場合、デプス画像変換部は、処理画素位置の奥行きの値(C)と処理画素位置の右1画素となりの奥行きの値(D)を取得し、処理画素位置の右1画素となりの奥行きの値(D)と処理画素位置の奥行きの値(C)の差分が所定の閾値(α)以上である(α≦D−C)場合、そのエッジ位置を右方向にN画素シフトする。
上記実施の形態では、左視点画像・右視点画像の2視点の画像を生成する場合を説明したが、本発明は必ずしもこの場合に限定されない。2視点以上の多視点画像を生成してもよい。本実施の形態では、図6に示される左目視点(L-View-Point)・右目視点(R-View-Point)の位置関係を考え、画素シフトすべき量を算出したが、左目視点・右目視点以外の視点の画像を生成するにあたっても、これと同様に視点の位置関係を考えることで画素シフトすべき量を算出し、画素シフトを行うことにより、その視点に対応する画像を生成することができる。
上記の実施の形態で説明した画素シフト処理は、ラインスキャン回路で実現することができる。ラインスキャン回路とは、フレームメモリに格納された一画面分の画素(1920×1080)の集りを横1920画素ずつ読み出してデジタル映像信号に変換するハードウェア素子である。かかるラインスキャン回路は、1行分の画素データを格納しうるライン画素メモリと、フィルタ回路、パラレル/シリアル変換を行う変換回路によって実現することができる。上述したように画素シフト処理は、デプス画像の個々の画素の輝度を視差に変換して画素のシフトを行う処理である。ラインメモリに読み出された全周囲画像の一ライン分の画素の座標を、全周囲画像に対するデプス画像における対応するラインの奥行きに応じた画素数だけ横方向に移動すれば、デプス画像における個々の示される奥行きをもたらす他視点からの視点映像を作成することができる。
上記の実施の形態では、2次元画像およびデプス画像を入力し、デプス画像に基づく画素シフトにより左目用画像および右目用画像を得る場合を説明したが、本発明は必ずしもこの場合に限定されない。左目用画像および右目用画像を入力し、デプス画像は左目用画像および右目用画像から生成するとしてもよい。
実施の形態2にかかる画像処理装置は、実施の形態1にかかる画像処理装置100と同様に、デプス画像のエッジ位置を後景側に移動させ、エッジ位置移動後のデプス画像を用いて画素シフト処理を行い、その後画素シフトにより生じた画素値が存在しない欠落領域を補間する画像処理装置であるが、エッジ位置移動処理の際、後景側の画素の複雑度を算出し、後景側の画素の複雑度が所定の閾値以下である場合を条件に、エッジ移動処理を行う点において、実施の形態1にかかる画像処理装置100と異なる。後景オブジェクトが複雑でなく画素変化が単調な場合に限り、エッジ移動処理を行うので、複雑な後景オブジェクトが引き延ばされ、画像全体の画質が劣化することを防ぐことができる。
実施の形態3にかかる画像処理装置は、実施の形態1にかかる画像処理装置100と同様に、デプス画像のエッジ位置を後景側に移動させ、エッジ位置移動後のデプス画像を用いて画素シフト処理を行い、その後画素シフトにより生じた画素値が存在しない欠落領域を補間する画像処理装置であるが、エッジ位置移動処理の際、前景側の画素の複雑度と後景側の画素の複雑度を算出し、算出した前景側の画素の複雑度と後景側の画素の複雑度を比較する。そして、前景側の画素の複雑度が後景側の画素の複雑度よりも高い場合を条件に、エッジ移動処理を行う。前景オブジェクトが後景オブジェクトよりも複雑である場合に限り、エッジ位置を後景側に移動させるため、前景オブジェクトよりも複雑なオブジェクトが引き延ばされ、画質が劣化することを防ぐことができる。
実施の形態4にかかる画像処理装置は、実施の形態1にかかる画像処理装置100と同様に、デプス画像のエッジ位置を後景側に移動させ、エッジ位置移動後のデプス画像を用いて画素シフト処理を行い、その後画素シフトにより生じた画素値が存在しない欠落領域を補間する画像処理装置であるが、前のフレームにおける複雑度を参照して、エッジ位置の移動処理を行う点に特徴がある。これにより1フレーム単位で、前景オブジェクトが補間によりぼけて歪んだ画像、後景オブジェクトが補間によりぼけて歪んだ画像が交互に表示されることを防ぎ、ちらつき発生による動画像の画質が劣化を防ぐことができる。
実施の形態5にかかる画像処理装置は実施の形態1にかかる画像処理装置100と同様に、デプス画像のエッジ位置を後景側に移動させ、エッジ位置移動後のデプス画像を用いて画素シフト処理を行い、その後画素シフトにより生じた画素値が存在しない欠落領域を補間する画像処理装置であるが、処理範囲を指定し、指定した処理範囲に対してエッジ位置移動処理を行う点に特徴がある。
実施の形態6にかかる画像処理装置は、実施の形態1にかかる画像処理装置100と同様に、デプス画像のエッジ位置を後景側に移動させ、変更後のデプス画像を用いて画素シフト処理を行い、その後画素シフトにより生じた画素値が存在しない欠落領域を補間する画像処理装置であるが、デプス画像変換部がデプス画像のエッジ位置移動後、さらにエッジを構成する画素に対して平滑化処理を行う点に特徴がある。
実施の形態7にかかる画像処理装置は、実施の形態1にかかる画像処理装置100と同様に、デプス画像のエッジ位置を後景側に移動させ、エッジ位置移動後のデプス画像を用いて画素シフト処理を行い、その後画素シフトにより生じた画素値が存在しない欠落領域を補間する画像処理装置であるが、デプス画像データにおけるエッジを定めるパラメータα、およびデプス画像のエッジを移動させる画素数を定めるパラメータNがユーザ操作により決定・変更される点において異なる。
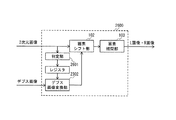
レジスタ2302は、操作部2301により入力されたデプス画像データにおけるエッジを定めるパラメータα、およびデプス画像のエッジを移動させる画素数を定めるパラメータNの値を記憶する機能を有する。
図26は、画像処理装置2600の構成の一例を示すブロック図である。なお、図1に示す実施の形態1にかかる画像処理装置100の構成と同じ部分については、同符号を付す。本図に示されるように、画像処理装置2600は、デプス画像変換部101、画素シフト部102、画素補間部103、判定部2601、およびレジスタ2302を含んで構成される。
なお、上記の実施の形態に基づいて説明してきたが、本発明は上記の実施の形態に限定されないことはもちろんである。以下のような場合も本発明に含まれる。
101 デプス画像変換部
102 画素シフト部
103 画素補間部
1101 デプス画像生成部
1201 複雑度算出部
1701 複雑度記憶部
1901 処理範囲選択部
2301 操作部
2302 レジスタ
2601 判定部
Claims (15)
- オリジナルの画像データにおける画素の座標をシフトすることにより、デプス画像データに示される奥行きをもたらす多視点の視点画像データを得る画像処理装置であって、
デプス画像データは、複数の画素からなる画素領域から構成され、デプス画像データにおける個々の画素の値は、オリジナルの画像データにおける個々の画素の奥行きを示し、
前記デプス画像データを構成する画素領域の内部から、被写体のエッジ部分を構成するエッジ画素群を検出して、当該エッジ画素群で取り囲まれる画素の座標を所定の方向に移動することにより、デプス画像データを変更するデプス画像データ変更手段と、
前記デプス画像データ変更手段により変更されたデプス画像データに示される奥行きを用いて、その奥行きをもたらす視差量を定め、その視差量に対応する画素数で、オリジナルの画像データにおける画素の座標をシフトすることにより、前記オリジナルの画像データとは異なる視点の画像データを生成する画素シフト手段と、
前記生成した視点画像データの領域のうち、画素シフトにより生じたオクルージョン領域を補間する画素補間手段とを備え、
前記所定の方向は、前記オリジナルの画像データにおける視点から、前記画素シフト手段で生成される画像データにおける視点の方向と同じ方向であり、
前記画素シフト手段により生成された視点画像データのうち、オクルージョン領域の両端には後景画素領域が存在しており、前記画素補間手段による補間では、オクルージョン領域の両端に存在する後景画素領域の画素が用いられる
ことを特徴とする画像処理装置。 - 前記デプス画像データ変更手段は、
前記デプス画像データのエッジで隔たれた前景領域、後景領域のうち、後景領域側にエッジ画素群で取り囲まれる画素の座標を移動させることを特徴とする請求項1に記載の画像処理装置。 - 前記画像処理装置は、さらに、
オリジナルの画像データに写る被写体の複雑度算出する複雑度算出手段を備え、
前記デプス画像データ変更手段は、
後景の領域の複雑度が所定の値以下である場合を条件に実行されることを特徴とする請求項2に記載の画像処理装置。 - 前記画像処理装置は、さらに、
オリジナルの画像データに写る被写体の複雑度算出する複雑度算出手段を備え、
前記デプス画像データ変更手段は、
前景の領域の複雑度が後景の領域の複雑度よりも高い場合を条件に実行されることを特徴とする請求項2に記載の画像処理装置。 - 前記画像処理装置は、さらに、
所定フレーム前のオリジナルの画像データにおける複雑度を記憶する複雑度記憶手段を備え、
前記デプス画像データ変更手段は、
所定フレーム前のオリジナルの画像データにおける前景領域の複雑度が所定の値以上である場合を条件に実行されることを特徴とする請求項2に記載の画像処理装置。 - 前記デプス画像データ変更手段は、
水平方向に隣接する画素との奥行きの値の差分が所定の値以上である画素を前記デプス画像データのエッジとして検出することを特徴とする請求項1に記載の画像処理装置。 - 前記画像処理装置は、さらに、
前記デプス画像データにおけるエッジを定めるパラメータを記憶するレジスタを備え、
前記デプス画像データ変更手段は、
水平方向に隣接する画素との奥行きの値の差分と、前記レジスタに記憶されたパラメータとを比較することにより、前記デプス画像データのエッジを検出することを特徴とする請求項6に記載の画像処理装置。 - 前記画像処理装置は、さらに、
ユーザ操作を受け付ける操作手段を備え、
前記レジスタが記憶する前記デプス画像データにおけるエッジを定めるパラメータは、前記操作手段からのユーザ入力により設定されることを特徴とする請求項7に記載の画像処理装置。 - 前記画像処理装置は、さらに、
オリジナルの画像データの種別を判定する判定手段を備え、
前記レジスタが記憶する前記デプス画像データにおけるエッジを定めるパラメータは、前記判定手段により判定された画像データの種別に基づき定まることを特徴とする請求項7に記載の画像処理装置。 - 前記デプス画像データ変更手段は、さらに、
前記エッジ画素群で取り囲まれる画素の座標の移動後、前記エッジ画素群で取り囲まれる画素に対して平滑化処理を行うことを特徴とする請求項6に記載の画像処理装置。 - 前記画像処理装置は、さらに、
前記デプス画像の画素の座標の移動させる画素数を定めるパラメータを記憶するレジスタを備え、
前記デプス画像データ変更手段は、前記レジスタに記憶されたパラメータに示される画素数だけ、前記デプス画像データのエッジ画素群で取り囲まれる画素の座標を所定の方向に移動させることを特徴とする請求項1に記載の画像処理装置。 - 前記画像処理装置は、さらに、
前記デプス画像データのうち、デプス画像変更を行う画像範囲を選択する処理範囲選択手段を備え、
前記デプス画像データ変更手段は、
処理範囲選択手段により選択された画像範囲に対して実行されることを特徴とする請求項1に記載の画像処理装置。 - オリジナルの画像データにおける画素の座標をシフトすることにより、デプス画像データに示される奥行きをもたらす多視点の視点画像データを得る画像処理方法であって、
デプス画像データは、複数の画素からなる画素領域から構成され、デプス画像データにおける個々の画素の値は、オリジナルの画像データにおける個々の画素の奥行きを示し、
前記デプス画像データを構成する画素領域の内部から、被写体のエッジ部分を構成するエッジ画素群を検出して、当該エッジ画素群で取り囲まれる画素の座標を所定の方向に移動することにより、デプス画像データを変更するデプス画像データ変更ステップと、
前記デプス画像データ変更ステップにより変更されたデプス画像データに示される奥行きを用いて、その奥行きをもたらす視差量を定め、その視差量に対応する画素数で、オリジナルの画像データにおける画素の座標をシフトすることにより、前記オリジナルの画像データとは異なる視点の画像データを生成する画素シフトステップと、
前記生成した視点画像データの領域のうち、画素シフトにより生じたオクルージョン領域を補間する画素補間ステップとを含み、
前記所定の方向は、前記オリジナルの画像データにおける視点から、前記画素シフト手段で生成される画像データにおける視点の方向と同じ方向であり、
前記画素シフトステップにより生成された視点画像データのうち、オクルージョン領域の両端には後景画素領域が存在しており、前記画素補間ステップによる補間では、オクルージョン領域の両端に存在する後景画素領域の画素が用いられる
ことを特徴とする画像処理方法。 - オリジナルの画像データにおける画素の座標をシフトすることにより、デプス画像データに示される奥行きをもたらす多視点の視点画像データを得る画像処理をコンピュータに実行させるプログラムであって、
デプス画像データは、複数の画素からなる画素領域から構成され、デプス画像データにおける個々の画素の値は、オリジナルの画像データにおける個々の画素の奥行きを示し、
前記デプス画像データを構成する画素領域の内部から、被写体のエッジ部分を構成するエッジ画素群を検出して、当該エッジ画素群で取り囲まれる画素の座標を所定の方向に移動することにより、デプス画像データを変更するデプス画像データ変更ステップと、
前記デプス画像データ変更ステップにより変更されたデプス画像データに示される奥行きを用いて、その奥行きをもたらす視差量を定め、その視差量に対応する画素数で、オリジナルの画像データにおける画素の座標をシフトすることにより、前記オリジナルの画像データとは異なる視点の画像データを生成する画素シフトステップと、
前記生成した視点画像データの領域のうち、画素シフトにより生じたオクルージョン領域を補間する画素補間ステップと
をコンピュータに実行させ、
前記所定の方向は、前記オリジナルの画像データにおける視点から、前記画素シフト手段で生成される画像データにおける視点の方向と同じ方向であり、
前記画素シフトステップにより生成された視点画像データのうち、オクルージョン領域の両端には後景画素領域が存在しており、前記画素補間ステップによる補間では、オクルージョン領域の両端に存在する後景画素領域の画素が用いられる
ことを特徴とするプログラム。 - オリジナルの画像データにおける画素の座標をシフトすることにより、デプス画像データに示される奥行きをもたらす多視点の視点画像データを得る画像処理に用いる集積回路であって、
デプス画像データは、複数の画素からなる画素領域から構成され、デプス画像データにおける個々の画素の値は、オリジナルの画像データにおける個々の画素の奥行きを示し、
前記デプス画像データを構成する画素領域の内部から、被写体のエッジ部分を構成するエッジ画素群を検出して、当該エッジ画素群で取り囲まれる画素の座標を所定の方向に移動することにより、デプス画像データを変更するデプス画像データ変更手段と、
前記デプス画像データ変更手段により変更されたデプス画像データに示される奥行きを用いて、その奥行きをもたらす視差量を定め、その視差量に対応する画素数で、オリジナルの画像データにおける画素の座標をシフトすることにより、前記オリジナルの画像データとは異なる視点の画像データを生成する画素シフト手段と、
前記生成した視点画像データの領域のうち、画素シフトにより生じたオクルージョン領域を補間する画素補間手段とを備え、
前記所定の方向は、前記オリジナルの画像データにおける視点から、前記画素シフト手段で生成される画像データにおける視点の方向と同じ方向であり、
前記画素シフト手段により生成された視点画像データのうち、オクルージョン領域の両端には後景画素領域が存在しており、前記画素補間手段による補間では、オクルージョン領域の両端に存在する後景画素領域の画素が用いられる
ことを特徴とする集積回路。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011147279 | 2011-07-01 | ||
| JP2011147279 | 2011-07-01 | ||
| PCT/JP2012/003252 WO2013005365A1 (ja) | 2011-07-01 | 2012-05-17 | 画像処理装置、画像処理方法、プログラム、集積回路 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2013005365A1 JPWO2013005365A1 (ja) | 2015-02-23 |
| JP6094863B2 true JP6094863B2 (ja) | 2017-03-15 |
Family
ID=47436733
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012547388A Expired - Fee Related JP6094863B2 (ja) | 2011-07-01 | 2012-05-17 | 画像処理装置、画像処理方法、プログラム、集積回路 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9401039B2 (ja) |
| JP (1) | JP6094863B2 (ja) |
| CN (1) | CN102972038B (ja) |
| WO (1) | WO2013005365A1 (ja) |
Families Citing this family (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9865083B2 (en) * | 2010-11-03 | 2018-01-09 | Industrial Technology Research Institute | Apparatus and method for inpainting three-dimensional stereoscopic image |
| JP6195076B2 (ja) * | 2012-11-30 | 2017-09-13 | パナソニックIpマネジメント株式会社 | 別視点画像生成装置および別視点画像生成方法 |
| ITTO20130503A1 (it) * | 2013-06-18 | 2014-12-19 | Sisvel Technology Srl | Metodo e dispositivo per la generazione, memorizzazione, trasmissione, ricezione e riproduzione di mappe di profondita¿ sfruttando le componenti di colore di un¿immagine facente parte di un flusso video tridimensionale |
| CN104427291B (zh) * | 2013-08-19 | 2018-09-28 | 华为技术有限公司 | 一种图像处理方法及设备 |
| ITTO20130784A1 (it) | 2013-09-30 | 2015-03-31 | Sisvel Technology Srl | Method and device for edge shape enforcement for visual enhancement of depth image based rendering |
| JP2015154101A (ja) * | 2014-02-10 | 2015-08-24 | ソニー株式会社 | 画像処理方法、画像処理装置及び電子機器 |
| CN105516578B (zh) * | 2014-09-25 | 2019-01-15 | 联想(北京)有限公司 | 图像处理方法、装置及电子设备 |
| US9894298B1 (en) | 2014-09-26 | 2018-02-13 | Amazon Technologies, Inc. | Low light image processing |
| US9414037B1 (en) * | 2014-09-26 | 2016-08-09 | Amazon Technologies, Inc. | Low light image registration |
| US9569859B2 (en) * | 2014-12-29 | 2017-02-14 | Dell Products, Lp | System and method for redefining depth-based edge snapping for three-dimensional point selection |
| US9639166B2 (en) * | 2015-03-11 | 2017-05-02 | Microsoft Technology Licensing, Llc | Background model for user recognition |
| CN104702935A (zh) * | 2015-03-31 | 2015-06-10 | 王子强 | 一种基于视差补偿的裸眼3d显示方法 |
| KR102341267B1 (ko) * | 2015-05-04 | 2021-12-20 | 삼성전자주식회사 | 양안 시차 영상에 대한 렌더링 방법 및 장치 |
| EP3185550A1 (en) * | 2015-12-23 | 2017-06-28 | Thomson Licensing | Tridimensional rendering with adjustable disparity direction |
| KR20180133394A (ko) * | 2016-04-06 | 2018-12-14 | 소니 주식회사 | 화상 처리 장치와 화상 처리 방법 |
| US10567739B2 (en) * | 2016-04-22 | 2020-02-18 | Intel Corporation | Synthesis of transformed image views |
| US10275892B2 (en) * | 2016-06-09 | 2019-04-30 | Google Llc | Multi-view scene segmentation and propagation |
| CN109496325A (zh) * | 2016-07-29 | 2019-03-19 | 索尼公司 | 图像处理装置和图像处理方法 |
| CN107155101A (zh) * | 2017-06-20 | 2017-09-12 | 万维云视(上海)数码科技有限公司 | 一种3d播放器使用的3d视频的生成方法及装置 |
| JP7277372B2 (ja) * | 2017-10-27 | 2023-05-18 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | 三次元モデル符号化装置、三次元モデル復号装置、三次元モデル符号化方法、および、三次元モデル復号方法 |
| US10902265B2 (en) * | 2019-03-27 | 2021-01-26 | Lenovo (Singapore) Pte. Ltd. | Imaging effect based on object depth information |
| US11042969B2 (en) * | 2019-05-23 | 2021-06-22 | Adobe Inc. | Automatic synthesis of a content-aware sampling region for a content-aware fill |
| CN110427742B (zh) * | 2019-08-06 | 2021-05-25 | 北京如优教育科技有限公司 | 认证服务平台内容保存系统、方法及存储介质 |
| CN113490963B (zh) * | 2020-01-22 | 2024-09-24 | 华为技术有限公司 | 显示系统、图形处理器gpu、显示控制器以及显示方法 |
| WO2023154431A1 (en) * | 2022-02-11 | 2023-08-17 | Canon U.S.A., Inc. | Apparatus and method for generating depth maps from raw dual pixel sensor data |
| US12380660B2 (en) * | 2022-08-22 | 2025-08-05 | Samsung Electronics Co., Ltd. | Method and device for direct passthrough in video see-through (VST) augmented reality (AR) |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3091622B2 (ja) * | 1994-02-25 | 2000-09-25 | 三洋電機株式会社 | 立体画像生成方法 |
| JP3614898B2 (ja) * | 1994-11-08 | 2005-01-26 | 富士写真フイルム株式会社 | 写真撮影装置、画像処理装置及び立体写真作成方法 |
| EP2219152B1 (en) * | 1999-01-25 | 2018-07-04 | Nippon Telegraph And Telephone Corporation | Digital watermark embedding and detecting method |
| JP4179938B2 (ja) * | 2003-02-05 | 2008-11-12 | シャープ株式会社 | 立体画像生成装置、立体画像生成方法、立体画像生成プログラムおよび立体画像生成プログラムを記録したコンピュータ読み取り可能な記録媒体 |
| WO2007096816A2 (en) * | 2006-02-27 | 2007-08-30 | Koninklijke Philips Electronics N.V. | Rendering an output image |
| US9445128B2 (en) * | 2006-12-08 | 2016-09-13 | Freescale Semiconductor, Inc. | System and method of determining deblocking control flag of scalable video system for indicating presentation of deblocking parameters for multiple layers |
| CN102124745A (zh) * | 2008-08-26 | 2011-07-13 | 升级芯片技术公司 | 用于将二维图像信号转换为三维图像信号的装置及方法 |
| TW201028964A (en) * | 2009-01-23 | 2010-08-01 | Ind Tech Res Inst | Depth calculating method for two dimension video and apparatus thereof |
| KR101590763B1 (ko) * | 2009-06-10 | 2016-02-02 | 삼성전자주식회사 | Depth map 오브젝트의 영역 확장을 이용한 3d 영상 생성 장치 및 방법 |
| JP5209121B2 (ja) * | 2009-09-18 | 2013-06-12 | 株式会社東芝 | 視差画像生成装置 |
| US8884948B2 (en) * | 2009-09-30 | 2014-11-11 | Disney Enterprises, Inc. | Method and system for creating depth and volume in a 2-D planar image |
| US8666146B1 (en) * | 2011-01-18 | 2014-03-04 | Disney Enterprises, Inc. | Discontinuous warping for 2D-to-3D conversions |
-
2012
- 2012-05-17 CN CN201280001206.5A patent/CN102972038B/zh not_active Expired - Fee Related
- 2012-05-17 JP JP2012547388A patent/JP6094863B2/ja not_active Expired - Fee Related
- 2012-05-17 US US13/636,437 patent/US9401039B2/en not_active Expired - Fee Related
- 2012-05-17 WO PCT/JP2012/003252 patent/WO2013005365A1/ja not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| CN102972038A (zh) | 2013-03-13 |
| JPWO2013005365A1 (ja) | 2015-02-23 |
| CN102972038B (zh) | 2016-02-10 |
| US20130076749A1 (en) | 2013-03-28 |
| US9401039B2 (en) | 2016-07-26 |
| WO2013005365A1 (ja) | 2013-01-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6094863B2 (ja) | 画像処理装置、画像処理方法、プログラム、集積回路 | |
| JP6021541B2 (ja) | 画像処理装置及び方法 | |
| US9525858B2 (en) | Depth or disparity map upscaling | |
| JP6147275B2 (ja) | 立体画像処理装置、立体画像処理方法、及びプログラム | |
| CN103081476B (zh) | 利用深度图信息转换三维图像的方法和设备 | |
| KR101690297B1 (ko) | 영상 변환 장치 및 이를 포함하는 입체 영상 표시 장치 | |
| CN103188441B (zh) | 生成重构图像的图像处理装置及图像生成方法 | |
| JPWO2012176431A1 (ja) | 多視点画像生成装置、多視点画像生成方法 | |
| JP5755571B2 (ja) | 仮想視点画像生成装置、仮想視点画像生成方法、制御プログラム、記録媒体、および立体表示装置 | |
| RU2690757C1 (ru) | Система синтеза промежуточных видов светового поля и способ ее функционирования | |
| JPWO2013038833A1 (ja) | 画像処理システム、画像処理方法および画像処理プログラム | |
| JP6128748B2 (ja) | 画像処理装置及び方法 | |
| JP2020005202A (ja) | 映像処理装置 | |
| JP5370606B2 (ja) | 撮像装置、画像表示方法、及びプログラム | |
| JP6033625B2 (ja) | 多視点画像生成装置、画像生成方法、表示装置、プログラム、及び、記録媒体 | |
| US9787980B2 (en) | Auxiliary information map upsampling | |
| US10506177B2 (en) | Image processing device, image processing method, image processing program, image capture device, and image display device | |
| JP5820716B2 (ja) | 画像処理装置、画像処理方法、コンピュータプログラム、記録媒体、立体画像表示装置 | |
| JP5627498B2 (ja) | 立体画像生成装置及び方法 | |
| JP2014072809A (ja) | 画像生成装置、画像生成方法、画像生成装置用プログラム | |
| JP2020195093A (ja) | 符号化装置、復号装置、及びプログラム | |
| WO2012090813A1 (ja) | 画像処理装置及び画像処理システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160301 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160428 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160816 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160915 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170110 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170202 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6094863 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| SZ03 | Written request for cancellation of trust registration |
Free format text: JAPANESE INTERMEDIATE CODE: R313Z03 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |