JP6167760B2 - 物品位置認識装置 - Google Patents
物品位置認識装置 Download PDFInfo
- Publication number
- JP6167760B2 JP6167760B2 JP2013174937A JP2013174937A JP6167760B2 JP 6167760 B2 JP6167760 B2 JP 6167760B2 JP 2013174937 A JP2013174937 A JP 2013174937A JP 2013174937 A JP2013174937 A JP 2013174937A JP 6167760 B2 JP6167760 B2 JP 6167760B2
- Authority
- JP
- Japan
- Prior art keywords
- article
- container
- position recognition
- captured image
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Manipulator (AREA)
- De-Stacking Of Articles (AREA)
Description
前記撮像部は、2つの撮像レンズを有し、水平方向に異なる位置からの2つの画像を撮影可能なステレオカメラであり、
前記物品位置認識部は、前記撮像画像から現実の物品が存在し得る物品存在領域を抽出して、抽出した領域に対して前記物品位置認識処理を実行し、
前記容器内の物品の上面のうち最も高い位置に位置する物品の上面の高さを検出する上面高さ検出部が設けられ、
前記物品位置認識部は、前記上面高さ検出部が検出した物品の上面を含む平面と、前記容器の内側面との交線である仮想枠線を前記撮像画像に設定し、前記撮像画像における前記仮想枠線よりも内方の領域を前記物品存在領域として抽出する。
点を特徴とする。
このため、撮像画像において容器の内側面に映り込んだ物品の反射虚像に影響されることなく、容器内での物品の位置を適切に認識することができる。
本構成によれば、撮像画像において、容器内の物品の上面のうち最も高い位置に位置する物品の上面を含む平面と、容器の内側面との交線である仮想枠線よりも内方の領域を物品存在領域として抽出するため、物品存在領域には、容器内の物品のうち最も高い位置に位置する物品を含めて容器内に存在する全ての物品が包含されることになる。
このように、本構成によれば、容器内の物品のうち最も高い位置に位置する物品が存在する領域を、適切に認識対象とすることができる。
図1は、ピッキングロボットPを備えるピッキング設備の斜視図である。ピッキングロボットPは、搬送コンベヤ22Cの搬送経路の側脇に設置されている。搬送コンベヤ22Cは、上位管理装置Hu(図2参照)からの指令にしたがって自動倉庫(図示省略)から出庫されたコンテナCを搬送する。コンテナCは、上面が開放されており、コンテナCの内部に収容された物品Bを上方から取り出し自在に構成されている。ピッキングロボットPは、搬送コンベヤ22Cの搬送経路における所定の停止位置(ピッキング用停止位置)に位置するコンテナCから、物品Bを、後述する吸着支持部40を用いて取り出すように構成されている。本実施形態では、コンテナCが容器に相当する。コンテナCの内部には、同一種別の物品が複数収容されるようになっている。
制御部Hには、撮像部50、ピッキングコントローラHp、及び、上位管理装置Huが制御部Hと相互に通信自在に接続されている。
撮像部50は、制御部Hからの指令によって画像を撮像するとともに、撮像した画像を制御部Hに送信可能に構成されている。
ピッキングコントローラHpは、ピッキングロボットPの移動機構及び吸着支持部40の作動を制御自在に構成されている。
物品位置認識装置は、ピッキング対象の物品BがコンテナC内のどの位置に存在するかを認識するために用いられるものであり、本実施形態においては、制御部Hと撮像部50とから物品位置認識装置が構成されている。
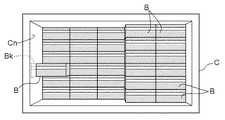
物品位置認識部H1は、撮像部50にて撮像した撮像画像(コンテナCを上方から撮像した画像。図3参照。)に基づいて、コンテナCに収容された物品Bの位置を認識する物品位置認識処理を実行する。物品位置認識処理は、上位管理装置Huから取り出し対象の物品Bの種別が指令されたときに、その物品Bに対応するテンプレート画像を記憶装置からロードし、撮像画像に対するテンプレート画像のパターンマッチングを実行することによって、その撮像画像における物品Bの位置(例えば、物品Bが上面視で矩形の物品である場合、コンテナCの特定の角部を原点とする座標系における物品Bの中心座標、物品Bの上面矩形の大きさ、及び物品Bの姿勢)を認識する処理である。
具体的には、撮像部50が撮像した2枚の撮像画像に基づいて、画素(ピクセル)ごとの撮像部50からの距離を算出し、撮像部50が設置されている高さから算出された上記距離を減算することで、各ピクセル毎の高さを算出し、高さとピクセル数との相関をグラフ化する(図4参照)。このグラフにおいて、ノイズ除去のための演算(例えば、平滑化微分等)を行った後、ピクセル数のピークとなる部分(図4においては高さT1、高さT2、高さT3)を検出する。図4において、高さT1に位置するピクセル群は、撮像画像においてコンテナCの上縁部に対応するピクセルの集合であり、高さT3に位置するピクセル群は、撮像画像においてコンテナCに収容される物品Bのうち最も上面が高い物品Bよりも低い位置に位置する物品Bの上面に対応するピクセルの集合である。そして、高さT2に位置するピクセル群は、撮像画像においてコンテナCに収容される物品Bのうち最も上面が高い物品Bの上面に対応するピクセルの集合である。上面高さ検出部H2は、高い方から2つ目のピークの高さT2を、コンテナC内の物品Bの上面のうち最も高い位置に位置する物品Bの上面の高さとして検出する。
すなわち、上面高さ検出部H2は、コンテナC内の物品Bの上面のうち最も高い位置に位置する物品Bの上面の高さT2を検出する。
反射虚像Bkが生じた状態のまま、物品位置認識部H1にて物品の位置を認識すると、反射虚像Bkを現実の物品Bの像(実像)と認識してしまい、実像からずれた位置を物品Bの位置として認識してしまう虞がある。
以下、物品位置認識装置の制御部Hが実行する処理を、図5のフローチャートに基づいて説明する。
続いて、制御部Hにおける上面高さ検出部H2が、コンテナC内の物品Bの上面のうち最も高い位置に位置する物品Bの上面の高さを検出し(ステップ#2)、検出した物品Bの上面の高さに対応する仮想枠線を撮像画像に設定する(ステップ#3)。
ステップ#3で設定される仮想枠線は、図6に示すように、上面高さ検出部H2が検出した物品Bの上面を含む平面と、コンテナCの内側面Cnとの交線(コンテナCの上面視の形状において、物品Bの上面の高さに対応する等高線)である。図6は、物品BがコンテナC内に複数段積層状態で収容される場合に、コンテナCの物品Bのうち最も高い位置に位置する物品Bが存在する段の夫々に対応する物品Bの上面の高さに対して設定される仮想枠線を、破線Wk1〜Wk5にて示している。
制御部Hは、ステップ#4で抽出した物品存在領域に対して、物品位置認識部H1が物品位置認識処理を実行する(ステップ#5)。
これにより、図7に示すように、撮像画像において反射虚像Bkが生じている虞がある部分を適切に排除することができる。
(1)上記実施形態では、上面高さ検出部H2によって検出された、コンテナC内の物品Bのうち最も高い位置に上面が位置する物品Bの上面の高さを含む平面と、コンテナCの内側面Cnとの交線を仮想枠線とし、当該仮想枠線よりも内方の領域を物品存在領域として抽出する構成としたが、例えば、撮像画像の各ピクセル毎の輝度を検出し、隣接するピクセルの輝度が所定の値以上変化する点を連結して仮想枠線を設定する等、他の方法にて仮想枠線を設定してもよい。また、物品Bの上面の高さに関係なく、常にコンテナCの底部上面Ctと内側面Cnとの境界Wtを仮想枠線とする構成でもよい。
B 物品
C 容器
Cn 内側面
H1 物品位置認識部
H2 上面高さ検出部
Claims (1)
- 内側面が平坦に形成されて上面が開放された容器を上方から撮像する撮像部と、
前記撮像部が撮像した撮像画像に基づいて、前記容器内に複数段積層状態で収容された複数の物品の位置を認識する物品位置認識処理を実行する物品位置認識部と、を備えた物品位置認識装置であって、
前記撮像部は、2つの撮像レンズを有し、水平方向に異なる位置からの2つの画像を撮影可能なステレオカメラであり、
前記物品位置認識部は、前記撮像画像から現実の物品が存在し得る物品存在領域を抽出して、抽出した領域に対して前記物品位置認識処理を実行し、
前記容器内の物品の上面のうち最も高い位置に位置する物品の上面の高さを検出する上面高さ検出部が設けられ、
前記物品位置認識部は、前記上面高さ検出部が検出した物品の上面を含む平面と、前記容器の内側面との交線である仮想枠線を前記撮像画像に設定し、前記撮像画像における前記仮想枠線よりも内方の領域を前記物品存在領域として抽出する物品位置認識装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013174937A JP6167760B2 (ja) | 2013-08-26 | 2013-08-26 | 物品位置認識装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013174937A JP6167760B2 (ja) | 2013-08-26 | 2013-08-26 | 物品位置認識装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015042965A JP2015042965A (ja) | 2015-03-05 |
| JP6167760B2 true JP6167760B2 (ja) | 2017-07-26 |
Family
ID=52696542
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013174937A Active JP6167760B2 (ja) | 2013-08-26 | 2013-08-26 | 物品位置認識装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6167760B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3718931A4 (en) * | 2018-02-26 | 2021-08-18 | Kabushiki Kaisha Toshiba | CONTROL DEVICE, PROGRAM AND SYSTEM |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6328796B2 (ja) * | 2015-01-13 | 2018-05-23 | 株式会社日立製作所 | マニプレータ制御方法、システム、およびマニプレータ |
| JP2020040789A (ja) * | 2018-09-11 | 2020-03-19 | 株式会社東芝 | 荷降ろし装置、及び、荷物の検出方法 |
| JP7170818B2 (ja) * | 2018-09-11 | 2022-11-14 | 株式会社東芝 | 荷降ろし装置、及び、荷物の検出方法 |
| JP7097799B2 (ja) * | 2018-11-21 | 2022-07-08 | Thk株式会社 | 画像情報処理装置、把持システム、および画像情報処理方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2730754B2 (ja) * | 1989-03-29 | 1998-03-25 | 豊田工機株式会社 | 視覚装置付ロボット |
| JP5088278B2 (ja) * | 2008-09-17 | 2012-12-05 | 株式会社安川電機 | 物体検出方法と物体検出装置およびロボットシステム |
| JP2012002683A (ja) * | 2010-06-17 | 2012-01-05 | Fuji Electric Co Ltd | ステレオ画像処理方法およびステレオ画像処理装置 |
| JP2013154457A (ja) * | 2012-01-31 | 2013-08-15 | Asahi Kosan Kk | ワーク移載システム、ワーク移載方法及びプログラム |
| JP5383836B2 (ja) * | 2012-02-03 | 2014-01-08 | ファナック株式会社 | 検索ウィンドウを自動的に調整する機能を備えた画像処理装置 |
-
2013
- 2013-08-26 JP JP2013174937A patent/JP6167760B2/ja active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3718931A4 (en) * | 2018-02-26 | 2021-08-18 | Kabushiki Kaisha Toshiba | CONTROL DEVICE, PROGRAM AND SYSTEM |
| US11981516B2 (en) | 2018-02-26 | 2024-05-14 | Kabushiki Kaisha Toshiba | Control apparatus, program, and system |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015042965A (ja) | 2015-03-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11288810B2 (en) | Robotic system with automated package registration mechanism and methods of operating the same | |
| US12233438B2 (en) | Robotic system having shuttle | |
| US12205188B2 (en) | Multicamera image processing | |
| JP7206421B2 (ja) | スマートフォークリフト及び容器位置姿勢ずれの検出方法 | |
| US11001441B2 (en) | Cargo handling apparatus and method | |
| CN106573381B (zh) | 卡车卸载机可视化 | |
| US10124489B2 (en) | Locating, separating, and picking boxes with a sensor-guided robot | |
| JP7531625B2 (ja) | コンテナの取り出し方法、装置、システム、ロボットおよび記憶媒体 | |
| US12358152B2 (en) | Method and computing system for performing grip region detection | |
| JP7398662B2 (ja) | ロボット多面グリッパアセンブリ及びその操作方法 | |
| JP6167760B2 (ja) | 物品位置認識装置 | |
| WO2021249568A1 (zh) | 仓储机器人的控制方法、装置、设备及可读存储介质 | |
| US20230071488A1 (en) | Robotic system with overlap processing mechanism and methods for operating the same | |
| JP6052103B2 (ja) | 物品認識装置及び物品認識設備 | |
| JP4655309B2 (ja) | ピッキング順序決定方法、装置及びそのプログラム、並びにピッキングシステム | |
| US20250005518A1 (en) | Surveillance system and methods for automated warehouses | |
| JP7499967B2 (ja) | 搬送システム、物品の搬送を制御するためにコンピュータで実行される方法、および、当該方法をコンピュータに実行させるプログラム | |
| JP2024155186A (ja) | 落下物検知装置及び移載装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151120 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161026 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161101 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161228 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170530 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170612 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6167760 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |