本発明を熱拡散率の測定装置に適用した一実施形態(以下実施例と記す)を図面に基づいて説明する。なお以下の実施例における図で、同一符号を付した構成はほぼ同じ内容の構成であり、ほぼ同じ作用を為しさらにほぼ同じ効果を奏する。同一符号を付した事項については説明の繰り返しを省略する。
図1から図3は本発明の一実施例である熱拡散率の測定装置(以下熱拡散率測定装置と記す)の一例を示す。図1は熱拡散率測定装置の全体構成を示すブロック図であり、図2は熱拡散率測定装置の測定部の構成を示す説明図、図3はその外観形状を示す図である。
図1乃至図3において、熱拡散率測定装置100は測定装置本体10と測定部12を備えている。測定装置本体10と測定部12の構成の一例を以下に説明するが、測定装置本体10と測定部12に分けることは必ずしも必須ではなく、また測定装置本体10と測定部12とに分けた構成であっても、熱拡散率測定装置100が有する各構成を測定装置本体10とするか測定部12とするかは色々選択可能である。本実施例では、熱拡散率測定装置100の利用者が試料2を固定するためにカバーを開けたとき、測定部が外気に出来るだけ触れないように構成している。このことにより装置は信頼性が高くなり、安定した測定の維持が容易となり、また安全性が確保し易くなるなど、色々な効果を奏する。
測定部12は試料2に対して所定の周波数で周期的に変化する加熱用レーザビーム27を発生する加熱手段22と加熱用レーザビーム27を絞込むレンズ24を備えている。レンズ24で絞り込まれた加熱用レーザビーム27が試料2の加熱点26に照射され、該加熱点26が所定の周期で繰り返し加熱される。
加熱手段22やレンズ24をX方向やY方向、Z方向に移動出来るようにするために、加熱手段22やレンズ24は加熱用ステージ20に支持されている。加熱用ステージ20をX方向およびY方向に移動させることにより、加熱点26をX方向およびY方向に移動させることができる。また加熱用ステージ20をZ方向に移動することにより、試料2の表面の加熱点26とレンズ24との間の距離を適切に設定することができる。例えば加熱点26とレンズ24との間の距離を変えることにより、試料2の加熱点26における加熱用レーザビーム27の照射面積、すなわちスポットの大きさを後記するように調整することができる。なお本実施例では以下で説明の図2に記載の如く、加熱用レーザビーム27の試料2に対する照射方向をZ軸とし、加熱用レーザビーム27が照射される試料2の表面をX軸とY軸からなる2次元の面としている。
加熱点26が加熱用レーザビーム27により周期的に加熱されることによって、試料2に設定された温度の測定点46に熱、すなわち温度波が伝達され、測定点の温度が周期的に変化する。測定点の温度を測定するために、測定部12は測定点46が発する赤外線47を集光するレンズ44と集光した赤外線47を電気信号に変えるセンサ42を備えている。なおセンサ42は以下で説明する測定回路35により動作し、センサ42で受光した赤外線47の強度に基づく電気信号が測定回路35で増幅されて出力される。加熱点26の温度が加熱用レーザビーム27の周期的な変化に基づいて変化するので、測定点46の温度が周期的に変化し、測定回路35は測定点46の温度変化を表す周期的に変化する電気信号を出力する。
X軸方向やY軸方向、Z軸方向に移動することができる測定用ステージ40にセンサ42やレンズ44が支持されているので、測定用ステージ40をX軸方向やY軸方向に移動することにより、測定点を試料2の表面における望ましい位置に設定することができる。また測定用ステージ40をZ方向に移動することにより、試料2の測定点とレンズ44との間の距離を調整することができ、測定点から発せられる赤外線47の集光状態を調整することができる。
なお、熱拡散率測定装置100を簡易型のシンプルな構造とする場合の1例として、加熱手段22やレンズ24を加熱用ステージ20に設けるのではなく、移動しない構造で固定することも可能である。この構造では、加熱手段22やレンズ24を3次元の各軸方向に移動できないが、試料2の表面とレンズ24との間の距離が所定の距離に維持される構造とすることが可能であり、また加熱点26も予め望ましい位置となるように設定しておくことが可能であり、このような構造とすることで装置をシンプルな構造とすることができる。さらに測定装置が一般的に広く利用される状態では、高度な技術を有する専門家だけでなく仮に熟練していない人が利用しても、ある程度の精度が保障されることが望ましく、このような場合には前記のような簡易型の構造の方が望ましい場合がある。
色々な試料を測定する場合に試料の厚さが一定でないことが考えられる。この場合に試料2の厚さが変わることにより、試料2とレンズ24との間の距離あるいは試料2とレンズ44との間の距離の一方が常に一定となる構造とした場合に、試料2の厚さの変化を他方で調整することが必要となる。このため第2例として、加熱手段22とレンズ24あるいはセンサ42とレンズ44のどちらか一方がZ方向に調整できる構造とすることが考えられる。上述したように第1の例や第2の例とすることで、測定装置の構造の簡素化が可能となる効果を奏する。さらに測定方法も簡素化できる効果を奏する。
図1の如く加熱用ステージ20と測定用ステージ40の2つの移動用ステージを使用する例や上述したように第1や第2の例であっても、X軸方向やY軸方向、Z軸方向の3軸方向に移動できる構造とするのではなく、X軸方向のみ移動可能とすることにより、すなわち3軸方向に移動できる構造とするのではなく2軸方向のみや1軸方向のみとすることにより、測定装置の構造の簡素化が可能となる効果や測定方法の簡素化が可能となる効果が得られる。
次に測定装置本体10に設けられる各構成に付いて説明する。上述したように熱拡散率測定装置100の各構成部品を測定装置本体10に配置するか測定部12に配置するかは熱拡散率の測定の基本に関わる問題では無いので、色々な条件を考慮して変更することが可能である。本実施例では試料2を出し入れする時に熱拡散率測定装置100が開放された状態で、利用者が手で触れることができる測定用部品をできるだけ少なくした方が、信頼性の維持や耐久性の向上の点で望ましいとの考えに基づいて構造や部品の配置を決めている。
測定装置本体10には、以下で説明する熱拡散率の測定のための演算処理や測定動作の制御を行う制御装置70が設けられていて、該制御装置70により加熱用ステージ20や測定用ステージ40を制御することができる。また測定装置本体10には、制御装置70からの制御信号により測定部12の加熱用ステージ20や測定用ステージ40を動作させるための駆動回路36および37が設けられていて、上記制御装置70の入出力端74からの制御信号に基づき、加熱用ステージ20や測定用ステージ40の位置を制御することができる。
さらに上記制御装置70の入出力端74からの加熱周波数fを設定する指令に基づき、周期信号発生回路32は設定された加熱周波数fの周期信号32Sを発生し、この周期信号32Sが駆動回路33介して加熱手段22に加えられる。加熱手段22は図示しないレーザ発生素子を備えており、前記レーザ発生素子は加熱周波数fに基づいて変化するレーザ光を発生し、レンズ24を介して加熱点26に前記レーザ光が照射される。さらに測定装置本体10には、センサ42を動作させて試料2の測定点46の温度を表す電気信号を出力する測定回路35と、この測定回路35から出力された電気信号と周期信号発生回路32の出力信号との位相差を検出する位相差検出回路34が設けられている。
位相差検出回路34は、例えばロックインアンプで構成することができ、位相差を送出することができる。ロックインアンプで構成された位相差検出回路34に周期信号発生回路32が発生する周期信号32Sと測定回路35が発生する周期信号35Sとを入力することにより、周期信号32Sに対する周期信号35Sの位相遅れθを検出することができる。
制御装置70は、熱拡散率測定装置100の利用者である測定者が操作するためのキーボードやマウスなどの入力装置79や必要な情報や処理結果等の情報を表示したり印刷したりする出力装置78を有する入出力装置77や、デジタル信号やアナログ信号を入出力するための入出力端子74や、演算処理を行う演算処理装置(central processing unit)72や、以下で説明するデータベース81〜84やデータ85や履歴86を保持するメモリ80を有している。なお制御装置70は演算処理装置72が動作するために必要なプログラムや一時記憶装置などを有しているが、これらの図示を省略する。
制御装置70が位相差検出回路34からの位相遅れθに基づいて以下に説明する演算処理を行うことにより、試料2の見かけの熱拡散率αrを求めることができる。さらにデータベース81〜84を用いて処理することにより、より正確な試料2の真の熱拡散率αtを求めることができる。
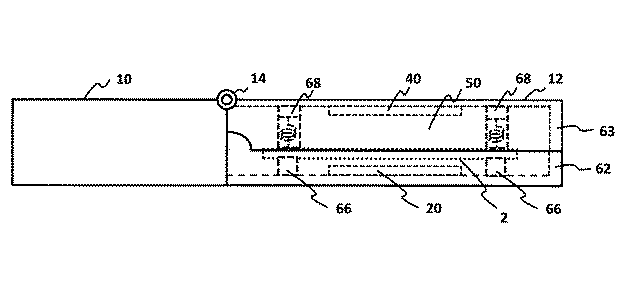
図2は測定部12の内部構成が理解し易いように模式的に記載した説明図であり、図3は測定部12の構成が理解し易いように記載した外観図である。図2と図3を用いて熱拡散率測定装置100の測定部12の概要を説明する。
測定部12の外側には構成器機を保護するためのカバー62とカバー63が設けられており、これらの内側に測定空間50が形成されている。試料2は測定空間50のXY平面上に置かれている。なお図2では測定部12の内部構造が見えるように、特別にカバー62およびカバー63を板状の形状とし、さらにカバー63を透明な状態として破線で記載している。このため図2では測定空間50は開放された空間となっている。しかし図3に示す如く安全性や測定の信頼性等の観点から測定空間50はカバーで覆われた空間となることが望ましい。
試料2は測定時には保持機構66や保持機構68により保持固定される。どのような固定方法でも利用可能であるが、本実施例では試料2を両面から保持機構66と保持機構68で挟む構造となっている。図3に示すように保持機構66と保持機構68の少なくとも一方、例えば保持機構68を、弾力性を有する構造とすることにより、試料2を保持機構66の上に載置し、さらに弾力性を有する保持機構68で反対面を押さえることで試料2を固定することができる。このように本実施例では試料2を所定の位置に簡単に固定することが可能となる。また保持機構66や保持機構68を熱抵抗の大きい材料で、例えば金属以外の材料で作ることにより、保持機構66や保持機構68の熱伝達の測定精度に及ぼす影響を低減できる。
試料2の一方の面に対して加熱用レーザビーム27を照射するための加熱手段22やレンズ24が設けられており、加熱点26に加熱用レーザビーム27が照射される。加熱用レーザビーム27の強さは図1に示す周期信号発生回路32が出力する周期信号32Sに基づいて変化する。このため加熱点26の温度が周期的に変化する。この実施例では、加熱手段22とレンズ24がX軸とY軸とZ軸に方向に移動可能な加熱用ステージ20に固定されている。試料2の一方の面がX軸とY軸とに沿うように試料2が配置されているので、加熱用ステージ20をX軸とY軸とに沿って移動させることにより、加熱点26を試料2の一方の面上で移動させることができる。また加熱用レーザビーム27がZ軸方向に照射される構造となっているので、加熱用ステージ20をZ軸方向に移動させることにより、加熱点26とレンズ24との間の距離を調整することが可能となり、加熱点26の大きさを調整することができる。なお、図3では加熱手段22やレンズ24の図示を省略している。
試料2の他方の面の側に、レンズ44やセンサ42が設けられており、測定点46の温度に基づく電気信号を図1の測定回路35から出力する。測定点46は加熱点26に対して試料2の表面上で距離Lだけ離れた位置に設定されており、加熱点26の周期的に変化する温度が測定点46に温度波として伝達され、測定点46の温度が周期的に変化する。
以下で説明するが加熱点26における温度の周期的な変化に対して、測定点46における温度の周期的な変化は位相が遅れており、この位相遅れθが距離Lと共に試料2の熱拡散率αに依存する。従って予め位相遅れθや距離Lに基づく熱拡散率αとの関係を求めておき、この関係をメモリ80に記憶しておけば、測定された位相遅れθから制御装置70の検索処理により熱拡散率αを求めることができる。さらに仮に距離Lを予め定めた値に設定しておけば、距離Lを検索パラメータから外すことができ、測定された位相遅れθからより簡単に熱拡散率αを求めることができる。しかし、以下で説明するように、発明者らの研究で明らかになった測定誤差の要因が存在し、これら測定誤差の要因に対応することが必要である。
前記位相遅れθは、加熱点26の周期的な温度変化(以下加熱周期波形と記す)と測定点46の周期的な温度変化(検出周期波形と記す)を求め、加熱周期波形と検出周期波形とを比較することで、求めることができる。加熱点26は図1の周期信号発生回路32が出力する周期信号32Sに基づいて変化していると見ることができる。従って加熱周期波形は周期信号32Sの周期波形と見ることができる。
測定点46の温度変化を検出するために、測定点46が発生する赤外線47をレンズ44により集光し、集光された赤外線47がセンサ42と測定回路35により周期信号35Sに変換される。上述したように加熱点26の温度変化を表す周期信号32Sと測定点46の温度変化を表す周期信号35Sとから位相差検出回路34により、位相遅れθが検知される。
上述したようにセンサ42やレンズ44は測定用ステージ40に設けられているのでセンサ42やレンズ44をX軸とY軸に沿って移動することにより、測定点46の位置を所定の間隔で移動することができ、測定点46の位置を移動させながら、各位置における位相遅れθを順に連続して測定することが可能である。
レンズ24やレンズ44として例えばCaF2、Si、Ge、ZnSeなどの良好な透過性を有する材料を用いた有限補正系のレンズを用いることができる。また金コートされた2つの放物面ミラーで、レンズ24やレンズ44を構成することができる。
本実施例では、試料2の一方の面に加熱手段22やレンズ24に基づく加熱点26を設け、試料2の他方の面に測定点46を設定し測定点46の温度をレンズ44やセンサ42で測定する構造としている。加熱点26や測定点46を異なる面ではなく同じ面に設けても良いが、本実施例の如く、加熱点26と測定点46を試料2の表面と裏面に分けて設けることにより、熱拡散率測定装置100を小型にすることができる。また加熱手段22やレンズ24とレンズ44やセンサ42とを同一の面に設けると、加熱点26と測定点46とが接近している場合に、加熱手段22やレンズ24とレンズ44やセンサ42とが互いにぶつかり合うことが懸念されるが、本実施例ではそれぞれ異なる面に配置されているので加熱点26と測定点46を自由に設定することができる。
図3は測定部12の形状の一例を示している。カバー62は測定装置本体10に固定されており、カバー63は例えば蝶番のような回転支持体14により測定装置本体10に固定されている。カバー63を図の上方向に開くことができ、試料2を出し入れすることができる。カバー62には試料2を保持するための保持機構66が設けられており、またカバー63に弾性体で作られた試料2を固定するための保持機構68が設けられている。
カバー63を開き、保持機構66の上に試料2を置き、カバー63を閉じることにより弾性体で作られている保持機構68により試料2が抑えられ、保持機構66と保持機構68との間に挟まれることにより試料2が固定される。図では加熱手段22やレンズ24およびセンサ42やレンズ44の図示を省略しているが、加熱用ステージ20や測定用ステージ40を動作させることにより、加熱点26や測定点46の位置を調整できる。また試料面とレンズ24やレンズ44との間の距離を調整することができる。
保持機構66と保持機構68の少なくとも一方が、変形可能に作られているので、厚さの異なる試料2であっても、試料2の厚さの変化に対応することができる。なおこの例では、加熱用ステージ20に設けられたレンズと試料2の面との間の距離が常に一定となるので、加熱用ステージ20を使用しないで、保持機構66側に配置したレンズや加熱手段22をカバー62に固定しても良い。図示していない加熱点26を固定にしても図示していない測定点46の位置を測定用ステージ40により調整することにより、加熱点26のZ軸と測定点46のZ軸との間の距離Lを調整することができる。
〔周期加熱法の基本原理〕
次に前記の熱拡散率測定装置100に使用される周期加熱法の基本原理を説明する。周期加熱法は、等方的無限平面中に設けられた点を熱源としてその温度を所定の周波数(以下加熱周波数と記す)で周期的に変化させることにより熱拡散率α率などの温度伝搬率を測定する手法である。周期的に変化する熱源の温度をP0eiwtとした場合に熱源から距離Lの位置の周期的な温度変動は次式によって表される。
ここで、Lは加熱点26におけるZ軸と測定点46におけるZ軸との間の距離、Tacは測定点46の温度、ωは角周波数、tは時間、αは熱拡散率、cは単位体積あたりの比熱容量である。kは温度周期の波数であり次式で定義される。
ここで、fは測定者が設定する加熱周波数、μは熱拡散長である。これより加熱点26のZ軸から距離Lだけ離れた測定点46における温度Tacの加熱源における温度に対する位相遅れθは次式で表される。
(数3)式から位相遅れθは、距離Lや加熱周波数fの平方根に比例することがわかる。従って位相遅れθの距離依存性又は加熱周波数依存性を利用して熱拡散率αを求めることができる。すなわち距離Lあるいは加熱周波数fを変化させて位相遅れθを測定することにより、原理的には熱拡散率αを求めることができる。
図4は、(数3)式をグラフ化した図である。例えば(数3)式の関係が成り立つと仮定して、実際の測定において距離Lを変化させて、位相遅れθと距離Lとの関係をプロットしたグラフである。得られたグラフの勾配から原理的には熱拡散率αを得ることができる。しかし、実際の測定結果に基づくグラフは、図4に示すような直線のグラフではなく、直線からずれたグラフとなる。その理由として例えば、周期加熱法の基本原理は試料の厚さを無視できる場合において成り立つ原理であることや、実際の測定では加熱ビームの強度分布や検出器の感度分布の影響が無視できないからである。そこで、以下で説明するシミュレーションを用いて、試料の厚さの影響や、加熱ビームの強度分布の影響、検出器の感度分布の影響を考慮した熱拡散率αを求めることとした。
〔シミュレーションの概要〕
本実施の形態では円筒座標系を用いて、測定対象試料が厚さ50−1000mmの範囲の値を持つと想定し、また半径10mmの回転対称の円板の測定を想定して、円筒座標系を用いた有限要素法のシミュレーションを行った。ソフトウェアはCOMSOL Multiphysicsを使用した。上述影響の確認のために試料2の厚さや試料2の形状、距離Lをこのように想定したが、このシミュレーションに基づく本発明は、試料2の適用範囲を前記に限定するものではない。本発明では、前記想定の範囲以外の試料2に対しても測定精度が向上する効果が得られ、またそれ以外の実施例の説明のおいて述べる効果を奏することができる。
周期加熱法の基本原理では試料厚さを考慮していないが、ここでは厚さを考慮した計算を行うため、図5に記載のように加熱部10の加熱点26から測定点46までの直線距離Rを定義した。Rは、試料の厚さdと前記説明の距離Lに対応する半径rを用いて次式で表される。
厚さを考慮する計算では、基本原理で説明した距離Lを直線距離Rとして計算する。試料の表面を加熱するレーザ強度は,ガウシアン分布に従う以下の式によって表される。
Eはレーザの全吸収エネルギー、aはガウシアンレーザビームの半径である。なおレーザ照射部位以外の表面は断熱と仮定している。
〔シミュレーション条件〕
次にシミュレーション条件を説明する。一例として試料2は、材料が銅の試料を用いる。空間メッシュは三角要素法を用い、熱拡散長の20分の1程度とする。レーザの加熱周波数は試料2の材料を考慮し10Hzとする。またガウシアンレーザビームの半径aは151μm、レーザの全吸収エネルギー Eは、80×10−3W/m2とする。センサ42の感度分布の半径は600μmとし、熱拡散長は8.51×10−4mから2.73×10−3mの範囲において測定し、試料2の熱拡散率αを求める。
〔試料と振動数の関係〕
前記のように、銅材で作られた試料2を考慮して、このシミュレーションでは加熱周波数fを10Hzに選んでいる。加熱周波数fをこの加熱周波数以外の他の加熱周波数の値に設定することも可能であるが、試料2の材料に基づき望ましい加熱周波数fが変わる。材料に対する望ましい加熱周波数fの関係を図6に記載する。図6の欄Aには試料2の材料の内代表的なものを示し、欄Aに記載の材料に対応した望ましい加熱周波数fの範囲を欄Cに示す。例えば試料2の材料が銅である場合の望ましい加熱周波数fの範囲は5Hzから50Hzであり、材料がステンレスである場合の望ましい加熱周波数fの範囲は0.2Hzから2Hzである。欄Cに示す加熱周波数fを使用して測定した熱拡散率αの平均値を欄Bに示しており、試料2の材料が銅である場合の熱拡散率αは1.16×10−4m2/sである。他の材料に関しても同様である。
図6に示すデータは、図1に記載の本実施例において、加熱周波数fの決定に利用される。このため図6に示すデータは、データベース82としてメモリ80に記憶されている。以下で記載するが、熱拡散率測定装置100の利用者が材料を入力することにより、予め記憶されているデータベース82が出力装置78に表示され、前記利用者が加熱周波数fの決定に利用することができる。あるいは好ましい加熱周波数fがデータベース82に基づいて自動的に決定される。決定された加熱周波数fは制御装置70から周期信号発生回路32に指令として送信され、周期信号発生回路32は決定された加熱周波数fに基づく周期信号32Sを発生する。
〔温度検出の感度分布〕
実際の測定では測定点46が面積を無視できるような小さい点ではなく、面積を持つ。すなわち実際の測定点46は面積を持ち、その面積に対してセンサ42が赤外線47を測定する場合に感度分布を持って測定することとなる。
次に測定点46の温度検出の感度分布について説明する。実験的な温度測定の検出感度の空間分布を得るために、図7に示すように、材料が銅の試料2の測定面の半分を黒化処理した黒化処理面3とし、測定面の残り半分を黒化処理しない非黒化処理面4として、試料2の裏面をヒータ23で均一に加熱し、センサ42である赤外線検出器で測定位置xを変化させながら試料2の表面の温度を測定した。
試料2の表面の内、黒化膜処理した黒化処理面3からは赤外線が放射されるが、黒化膜処理を行っていない非黒化処理面4からは赤外線が放射されない。図7に示すように、平板形状のヒータ23により試料2を均一に加熱し、黒化処理面3の方を距離xの正側また非黒化処理面4の方を距離xの負側として、距離xを変えながら黒化処理面3から非黒化処理面4の方へ測定点46を移動する。すると黒化膜処理している黒化処理面3では信号強度が大きく、黒化膜処理していない非黒化処理面4では赤外線の量が減少し検出される信号強度が小さくなる。この測定結果を図8のグラフAで示す。このグラフAは温度分布関数U(x)であり、測定点46が黒化膜処理している黒化処理面3と黒化膜処理されていない非黒化処理面4との境界を距離xのゼロ点とすると、距離xの正側の温度が高く、距離xの負側の温度が低い状態を表している。そして、温度分布関数U(x)であるグラフAのxに対する微分値を求めると、微分値はグラフBで表され、このグラフBが検出感度分布S(x)を表す。
図8は、温度分布を表すグラフAと感度分布を表すグラフBとを表示した図である。温度分布を表すグラフAは、上述したように距離xと測定温度との関係を表しており、図の左側の縦軸が測定温度を示し、横軸が距離xを示す。またグラフBは感度分布を表し、横軸の距離xをグラフAと共通の軸とし、図の右側の縦軸がグラフBの縦軸である感度を表している。グラフAの各黒点は、距離xを変化させ状態での各距離xにおける測定温度をプロットした点であり、グラフAの破線は各測定温度をスムーズ化して求めた温度分布関数U(x)を表す。
温度が高い位置で収束する、距離xが0.6mm付近の領域31は、試料2の黒化膜処理されている部分を測定領域とした測定結果の温度分布を表している。また温度が低い位置で収束する、距離xが−0.6mm付近の領域32は、黒化膜処理されていない部分を測定領域とした測定結果とした温度分布を表している。
またグラフBが、温度分布関数U(x)を表すグラフAを微分して得られたグラフで、感度分布S(x)を表す。グラフAが表す温度分布関数U(x)が、黒化膜処理をしている黒化処理面3と黒化膜処理を施していない非黒化処理面4との境界、すなわち距離xが0.0mmの位置で最も変化が大きいため、測定感度S(x)は黒化処理面3と非黒化処理面4との境界上である一点鎖線Aの位置で最大となる。
実際には検出器の中心に対する軸対称の感度分布を求める必要がある。つまり、検出器の中心から半径方向の距離をrsとした場合の位置rsの感度分布S(rs)を求める。図8の感度分布S(x)の関数の形から、感度分布S(rs)がrsの4次多項式で近似できると仮定して、座標変換を行ない、図8のグラフB示す感度分布S(rs)を求める。
またシミュレーションによれば上述したように測定結果の精度を向上するためには試料2の厚さの影響も考慮しなければならない。試料2の厚さの影響や検出感度分布などの影響をできるだけ少なくして測定精度を向上することが望ましい。以下精度向上についての考え方について説明する。
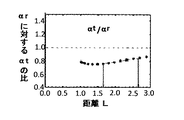
図9は距離Lを変化させながら位相遅れθを測定したグラフである。(数3)式を用いて熱拡散率αを位相遅れθと距離Lから求めると、もし上述した影響がなければ距離Lを変えて測定された各位相遅れθの測定結果に対して、一定の熱拡散率αとなるはずである。しかし、実際の測定結果では図10で示すような結果となる。変化させながら測定した各距離Lにおける位相遅れθから演算した熱拡散率α(以下見かけの熱拡散率αrと記す)に対する、試料2の真の熱拡散率α(以下真の熱拡散率αtと記す)の割合を図10に示すようになる。この測定結果では見かけの熱拡散率αrが真の熱拡散率αtより大きな値を示すので、(真の熱拡散率αt/見かけの熱拡散率αr)の比は1より小さい値となっている。見かけの熱拡散率αrが真の熱拡散率αtより大きい値となるか小さい値となるかは色々な条件で異なり一概には述べられないが、見かけの熱拡散率αrが真の熱拡散率αtとは異なる値を示すことが分かる。また距離Lに対して(真の熱拡散率αt/見かけの熱拡散率αr)の比は一定ではなく変化しており、距離Lが大きくなるに従って前記見かけの熱拡散率αrが真の熱拡散率αtに近づく傾向が見られる。
加熱点26から十分に離れた位置に測定点46を設定すれば、測定点46の測定結果に基づく見かけの熱拡散率αrが真の熱拡散率αtに近い値を示すこととなるが、実際にはいろいろ困難な課題が生じる。例えば加熱点26と測定点46との間の距離Lを十分に長くすると、測定点46で加熱周波数に基づいて発生した温度波が距離Lと共に減衰し、測定点46では減衰が大きく温度波の測定が困難となる。
これらのことから真の熱拡散率αtに近い精度の高い熱拡散率を得るために次のような処理1、あるいは処理1と処理2とを実行する。処理1では、測定された見かけの熱拡散率αrから真の熱拡散率αtを求めるための補正係数Cを予め求めて、この補正係数Cを図1のメモリ80にデータベース83として記憶しておく。この補正係数Cは、例えば(真の熱拡散率αt/見かけの熱拡散率αr)の比として表され、例えば見かけの熱拡散率αrに補正係数Cを乗じることにより、真の熱拡散率αtのを求めることができる。
処理2は、距離Lの適正な設定についてである。距離Lが短いと距離Lに依存して見かけの熱拡散率αrが大きく変化する。しかし加熱点26に対して測定点46が少し離れると距離Lにして変化する見かけの熱拡散率αrの変化が小さくなる。見かけの熱拡散率αrの距離Lに依存する変化が所定値より小さくなる見かけの熱拡散率αrを使用し、この見かけの熱拡散率αrを用いて前記補正係数Cから真の熱拡散率αtを演算することにより、前記温度波の減衰が比較的小さい、言い換えると高い精度で前記温度波を測定できる位置の距離L使用することができる。
距離Lを大きくすると上述したように前記温度波の減衰が大きく、前記温度波の測定精度が低下する、あるいは前記温度波の測定が困難となる。従って真の熱拡散率αtを所定の精度で得ることができる距離Lであっても必要以上に距離Lが長くなることがない位置に測定点46が存在する状態の測定結果を使用して見かけの熱拡散率αrを求め、この見かけの熱拡散率αrを前記補正係数で補正して真の熱拡散率αtを算出する。
適切な距離Lでの測定結果が使用されるようにフィッティング領域を設定する。このフィッティング領域は例えば1mmとする。図9や図10では例えば以下に説明のようにしてフィッティング領域を求めることにより、結果として1.53mmから2.53mmの領域がフィッティング領域として設定され、この場合にフィッティング領域の幅を上述したように1mmとしている。このフィッティング領域の幅は、発明者が行った多くの実験結果に基づいて経験的に定めたものであり、この幅の設定には測定対象となる試料の大きさや図9に示す特性曲線の状態が反映されている。前記フィッティング領域の幅は、0.5mm〜2mmが適切である。
〔真の熱拡散率αtの測定〕
図11から図14を使用して、熱拡散率測定装置100に取り付けられた試料2の真の熱拡散率αtを測定する手順を説明する。図11は、上述した図9に対応する図であり、図12は、図9との関係において見かけの熱拡散率αrを求めるための図である。図13は見かけの熱拡散率αrに対する補正係数Cを求める図である。図12や図13は、予め実測やシミュレーションから求められたデータベースの内容を説明する図であり、図12や図13に示すデータベースはそれぞれ図1のメモリ80にデータベース84や83として検索可能に保持されている。図14は、測定された図9に示す温度波の位相遅れθのデータから真の熱拡散率αtを演算するための熱拡散率測定装置100の動作を示すフローチャートである。
なお本明細書では、制御装置70が行う演算処理の定義には、単なる代数的な計算だけでなく、予め検索可能なデータを記憶しておき前記データの検索に基づいて結果を導く処理や、色々な補間演算、さらには色々な統計処理も含まれるものとする。
図14に示すフローチャートのステップS120が実行され、真の熱拡散率αtを求める動作が開始される。この実施例では、試料2の材料は銅を主成分としており、試料2の厚さの実測値が318μmである。フローチャートのステップS120が実行されると、ステップS122で、図1〜3に示す装置で、加熱点26に対する測定点46の位置を変えながら、すなわち距離Lを変えながら位相遅れθの測定を行い、その結果を図1のメモリ80にデータ85として記憶する。この測定結果を図11に示す。既に図9で説明したグラフと同様、ステップS122で測定されたデータをグラフとして示すと、図11に示すグラフとなり横軸が距離Lで縦軸が位相遅れθである。なお試料2の材料は銅を主成分としており、図1のメモリ80に記憶されたデータベース82に基づき、加熱周波数fを10Hzとしている。なおこの測定動作は、演算処理装置72を有する制御装置70により自動的に行われ、測定結果が自動的にメモリ80に保持される。
まずステップS124で、制御装置70により自動的に任意のフィッティング領域(I)の設定が行われる。このフィッティング領域(I)は図11に示すようにフィッティング領域(I)は(L=0.0mm〜1.0mm)を任意のフィッティング領域としている。このようにできるだけ距離Lが小さい値で先ずフィッティング領域(I)を設定することが望ましい。その理由は次のとおりである。
加熱点26から伝搬される温度波は距離が長くなるに従い減衰し、減衰に伴い温度波の測定精度が低下する。距離Lが小さい位置の測定データをできるだけ使用することが、位相遅れθの測定精度を向上することになる。本実施例では、任意のフィッティング領域(I)を先ず距離Lの小さい値の方で設定するので、フィッティング領域の収束条件を、距離Lの値ができるだけ小さい領域で見つけ出すことができ、この結果高い測定精度のデータ使用して見かけの熱拡散率αrを求めることができる。このことは真の熱拡散率αtの測定精度の向上につながる。
次にステップS126で制御装置70は見かけの熱拡散率αrを演算により求める。制御装置70は、フィッティング領域(I)内の実測値である黒丸をつなぐ線M1を求め、線M1の傾きから見かけの熱拡散率αrを求める。図4を使用して説明した基本原理では、距離Lの範囲によらず一定の傾き〔−(α/f)1/2〕が得られたが、実際には上述したように試料の厚さや感度分布などの影響により、距離Lに対する位相遅れθの傾きが一定の直線とはならず、結果として図11に示す測定結果では距離Lの範囲によって熱拡散率の傾きが異なる値となる。そのため数3で示した式により、制御装置70により求められたフィッティング領域(I)の熱拡散率αは真の熱拡散率αtではなく、見かけの熱拡散率αrである。本実施例では、制御装置70が演算して求めた領域Iの見かけの熱拡散率αrは1.03×10−4m2/sである。
次にステップS128で、制御装置70が演算により求めた見かけの熱拡散率αrから、制御装置70は逆に距離Lおよびフィッティング領域を演算する。ステップS128で演算した見かけの熱拡散率αrから距離Lを簡単に求められるように、図12に示すデータベースが図1のメモリ80にデータベース84として保持されている。図12に示すデータベースは、横軸を(見かけの熱拡散率αr/加熱周波数f)とし、縦軸を試料2の厚さdとしている。従ってステップS128で、制御装置70は演算により求めた見かけの熱拡散率αrから横軸である(見かけの熱拡散率αr/加熱周波数f)を演算し、(見かけの熱拡散率αr/加熱周波数f)と試料2の厚さdをパラメータとしてデータベース84を検索することにより、見かけの熱拡散率αrに対応した距離Lを求める。
制御装置70により検索された距離Lは図12の矢印Iで示す値で、距離Lは1.53mmである。この距離Lを基に、図11で新たなフィッティング領域II(1.53〜2.53mm)が制御装置70によって設定される。なおこのときのフィッティング領域の幅は最初の設定のとおりで1mmである。
ステップS132で制御装置70は新たなフィッティング領域II(1.53〜2.53mm)がその前のフィッティング領域Iに対して収束した状態かどうかを判断する。この例では、フィッティング領域Iとフィッティング領域IIとは大きく離れているので、制御装置70は収束していない、すなわち(NO)であると判断する。通常1回で収束することは少ない。
再びステップS126により、制御装置70は新たに設定されたフィッティング領域であるフィッティング領域II(1.53〜2.53mm)に基づいて、図11における位相遅れθの測定値をつなぐ線M2を求め、その傾きから新たな見かけの熱拡散率αrを演算する。上述したようにステップS128で、新たな見かけの熱拡散率αrに基づき新たなフィッティング領域IIIを図12に示すデータベースから算出する。制御装置70により新たに演算されたフィッティング領域IIIは、この実施例では1.60〜2.60mmである。フィッティング領域IIIは1.60〜2.60mmであり、フィッティング領域IIは1.53〜2.53mmであり、その差は予め設定した所定値以下となり、フィッティング領域が収束した状態と判断することができる。ここでフィッティング領域が収束したか否かを判断する前記所定値は予め決められてメモリ80のデータ81として記憶していてもよいし、利用者が測定開始時に入力しても良い。例えばこの所定値は0.1mmであり、この実施例のフィッティング領域の幅1mmより小さい値である。また図12で矢印IIや矢印IIIはフィッティング領域IIやフィッティング領域IIIの検索状態を示しており、矢印IIは1.53mmを指し、矢印IIIは1.60mmを指している。なお、フィッティング領域Iは0.0mm〜1.0mmであり、図12に記載の領域から外れているため、フィッティング領域Iについては図12に記載されていない。
制御装置70はステップS132で、フィッティング領域が収束したと判断し、制御装置70は次にステップS134を実行する。前記新たに演算された見かけの熱拡散率αr(1.13×10−4m2/s)が信頼できる最終の見かけの熱拡散率αrであると決定される。ステップS134で制御装置70は、最終の見かけの熱拡散率αrを基に図13に示すデータベースから補正係数Cを演算により求める。図13に示すデータベースは図1のメモリ80にデータベース83として保持されている。データベース83を検索するパラメータとしてこの実施例では、(見かけの熱拡散率αr/加熱周波数f)をパラメータとしさらに試料2の厚さdをパラメータとしている。上述したように最終の見かけの熱拡散率αrによりパラメータである(見かけの熱拡散率αr/加熱周波数f)が決定されるので、最終の見かけの熱拡散率αrに基づく補正係数Cが検索処理による決定される。
制御装置70はステップS136で、最終の見かけの熱拡散率αrと補正係数Cとに基づいてこれらの掛け算により真の熱拡散率αtを求め、演算結果である真の熱拡散率αtを出力する。この実施例では、見かけの熱拡散率αrが1.13×10−4m2/sであり、検索された補正係数Cが1.068であるので、真の熱拡散率αtは、1.21×10−4m2/sとなる。
図14に記載のフローチャートでは、試料2が取り付けられ、さらに諸条件が熱拡散率測定装置100に入力された後の位相遅れθの測定とそれに基づく真の熱拡散率αtを求める制御装置70の動作に付いて説明したが、この熱拡散率測定装置100は色々な材質の試料2の熱拡散率αを測定できる。このようにより広い用途に対応するための熱拡散率測定装置100の動作に付いて、次に説明する。
図15は、色々な材質の試料2の熱拡散率αを測定できる熱拡散率測定装置100の動作を説明するためのフローチャートである。例えば熱拡散率測定装置100の電源が投入されると、ステップS200で示すフローチャートの実行が開始される。
図2や図3に記載した一実施例としての熱拡散率測定装置100のカバー63を開け、試料2を取り付け、カバー63を再び閉じて準備完了の入力を行うと、ステップS202で熱拡散率測定装置100の制御装置70は準備完了の信号を受信したこととなり、制御装置70は測定に必要な入力を行うための表示を入出力装置77の出力装置78に表示する。
次にステップS204で、測定動作に必要なデータ例えば位相遅れθを測定して図9や図11に示す測定を行うための距離Lの変化範囲すなわち位相遅れθを測定するための距離Lの領域や、位相遅れθをそれぞれ測定するための距離Lに関する単位間隔や、試料2の厚さdや、試料2の主材料、などの入力を促す表示が為される。そしてステップS204で、測定者が前記必要なデータの入力を行い、制御装置70がステップS206で入力の完了を受信すると、制御装置70は次のステップS204で入力された距離Lの変化範囲に従って加熱用ステージ20あるいは測定用ステージ40のあるいはその両方の制御を行う。例えば制御装置70は、加熱点26と測定点46とのZ軸方向の法線間の距離Lが入力された距離Lの測定領域の最小値に対する値となるように、加熱用ステージ20あるいは測定用ステージ40を制御する。
さらにステップS204で入力された試料2の材料に基づいて、メモリ80にデータベース82として記憶されたデータをステップS210で表示する。このデータの一例は図6に記載のとおりであり、欄Aに記載の試料2の主材料に対する欄Cに示す加熱周波数fや欄Bに示す参考的な熱拡散率が、参考データとして表示される。ステップS210での表示は加熱周波数fの設定に非常に役立つことはもちろんであるが、例えば欄Bに示す参考的な熱拡散率が表示されることにより、これから測定される試料2の大よその熱拡散率αを推測することができ、誤測定の防止などにつながる効果がある。
加熱周波数fを自動設定するかどうかを、ステップS222で入力し、制御装置70が加熱周波数fの自動設定の有無を受信すると、ステップS224で制御装置70は受信内容に基づく判断を行い、自動設定の場合にはステップS226でメモリ80に記憶されているデータベース82に基づいて、加熱周波数fが自動的に設定される。また熱周波数fを自動設定しない場合には、制御装置70は、ステップS228で測定者による加熱周波数fの入力を受信する。
ステップS230では、図14で説明した動作により、制御装置70が図11に示す位相遅れθをステップS204で入力された範囲に対して自動的に前記距離Lを、ステップS204で入力された単位間隔づつ変化させながら測定する。この場合図14では説明を省略したが、1つの距離Lにおける位相遅れθが制御装置70により測定されると、制御装置70は次に、ステップS204で入力された測定を行うための単位間隔づつ距離Lが変化するように、加熱用ステージ20あるいは測定用ステージ40を制御して距離Lを順次変更する。そしてステップS204で入力された距離Lの領域におけるすべての単位間隔における位相遅れθを測定する。
このようにして図11に示す黒点のように、ステップS230で距離Lの単位間隔に対応した位相遅れθを全て測定する。この動作は図14のステップS122で説明の動作である。さらに図11に示す測定データに基づいて最終的な見かけの熱拡散率αrが制御装置70により求められる。
ステップS230では、図14で説明のようにして真の熱拡散率αtを測定する。そしてステップS232で、求められた真の熱拡散率αtが図1の出力装置78により表示あるいは印字される。ステップS234測定動作を終了する。
以上説明したように本実施例では、補正係数Cをデータベースとして記憶し、見かけの熱拡散率αrを補正係数Cで補正することができるので、熱拡散率αの測定精度を向上することができる。
さらに見かけの熱拡散率αrを求め、求めた見かけの熱拡散率αrを用いて距離Lを求め、距離Lに対する見かけの熱拡散率αrが収束状態となる最終の見かけの熱拡散率αrを求め、該最終の見かけの熱拡散率αrを使用して補正係数Cを求めると共に真の熱拡散率αtを演算するようにしているので、熱拡散率αの測定精度を向上することができる。
見かけの熱拡散率αrを用いて距離Lを求める演算をデータベースの検索により行うことができるので、本実施例では処理が簡単となる効果がある。
図12に示すデータベースを使用して求める距離Lは、見かけの熱拡散率αrと加熱周波数fと試料2の厚さdの3つのパラメータの関係により定まる。これら3つのパラメータをそのまま使用して距離Lを求めようとすると、パラメータの数が多いためその処理はたいへん複雑なものとなる。図13に示すデータベースを使用して補正係数Cを求める場合も同様である。補正係数Cは、見かけの熱拡散率αrと加熱周波数fと試料2の厚さdの3つのパラメータの関係で定まる。これら3つのパラメータをそのまま使用して補正係数Cを求めようとすると、パラメータの数が多いためその処理はたいへん複雑なものとなる。
発明者は、実験およびその実験結果の解析を繰り返すことにより、見かけの熱拡散率αrと加熱周波数fの2つのパラメータの比を求め、該2つのパラメータの代わりにこの比をパラメータとして使用できることを見つけ出した。この結果、距離Lを2つのパラメータの関係で表すことができる。図12に示すように、求める距離Lを(見かけの熱拡散率αrと加熱周波数fとの比)からなるパラメータと試料2の厚さdとの2つのパラメータで検索可能なデータベースとして記憶し、利用することが可能となった。
図13に示す補正係数Cに付いても同様であり、補正係数Cを(見かけの熱拡散率αrと加熱周波数fとの比)からなるパラメータと試料2の厚さdとの2つのパラメータで検索可能なデータベースとして記憶し、利用することが可能となった。
見かけの熱拡散率αrを補正する補正係数Cを検索可能なデータベースとして保持することが可能となったことにより、試料2の熱拡散率αの測定精度を大幅に向上することができた。また図12に示す距離Lを検索可能なデータベースとして保持できることで、試料2の熱拡散率αの測定精度をさらに向上させることができた。
図16は熱拡散率測定装置100の他の実施例を説明するフローチャートである。図16に記載のステップの内、図15に記載のステップと同一の参照符号を付したステップは、同様の動作をなし同様の効果を奏する。これらについての詳細な説明を省略する。
図16に示すフローチャートのステップS300が実行されると、このフローチャートの動作が開始される。図1に示す制御装置70は先ず図15に示すステップS202〜S206を実行し、次にステップS208〜S232を実行する。このステップS208〜S232の実行で、図15に示すステップS230が実行され、制御装置70は真の熱拡散率αtを演算により求め、ステップS232で出力装置78に表示するなどの方法で真の熱拡散率αtを出力する。これらのステップの動作は図15に基づき説明済みであり、説明を省略する。
次に図16のステップS312で加熱周波数fに基づき、測定される真の熱拡散率αtの予測範囲Rを求める。このステップS312がステップS208〜S232の後に実行されるが、これは単に一例であり、ステップS208〜S232の後に限るものではない。図15におけるステップS226やステップS228で加熱周波数fが定まると、ステップS312の実行が可能である。
ステップS312における真の熱拡散率αtの予測範囲Rについて説明する。図6に示す欄Bと欄Cは加熱周波数fと熱拡散率との対応関係を示している。例えば加熱周波数fが10Hz(ヘルツ)に設定された場合に、図6の欄Cと欄Bとの関係をみると予想される真の熱拡散率αtは、欄Bの値1.16×10−4あるいは3.58×10−5に近い値である。これらの熱拡散率から大きくかけ離れた測定結果が出た場合は、加熱周波数fの設定を誤った可能性が高い。試料2の主材料の判断を誤った場合や加熱周波数fの入力を誤った場合に、このような測定結果となる可能性がある。ステップS312で制御装置70は、加熱周波数fに基づき、予想される測定結果である予想される真の熱拡散率αtの予測範囲Rを図6のデータに基づいて定める。真の熱拡散率αtの予測範囲Rを加熱周波数fに基づいて求めるが、さらに加えて入力された図6の欄Aに示す材料を考慮して定めてもよい。
ステップS314で制御装置70は、前記ステップS208〜S232で行われた測定結果がステップS312で定めた予測範囲R内かどうかを判断する。範囲内であれば(YES)、測定結果としてステップS232で出力した値が正しいと判断し、制御装置70の実行がステップS332あるいはステップS334へ移る。一方ステップS314で制御装置70が、測定結果が予測範囲Rから外れていると判断した場合に、ステップS316を実行し、予測範囲Rに対して測定結果の真の熱拡散率αtがどちらの方に外れたかを判断する。もし測定結果が予測範囲Rに対して低い方に外れた場合に、制御装置70はステップS318を実行し、測定結果が異常値を示していることの表示、さらに測定結果が低い方に外れたことおよび加熱周波数fを下げるべきである旨の表示を図1の出力装置78を介して行う。逆に測定結果が予測範囲Rに対して高い方に外れた場合に、制御装置70はステップS322を実行し、測定結果が異常値を示していることの表示、さらに測定結果が高い方に外れたことおよび加熱周波数fを上げるべきである旨の表示を出力装置78を介して行う。このことにより、測定された結果が正しい値ではないことを検知して知らせることができると共に、正しい測定結果を得るためには加熱周波数fをどのように変更したらよいかの示唆を行うことができる。このことにより熱拡散率測定装置100の信頼性を向上することができる。さらに加熱周波数fをどのように修正すべきかの示唆を得ることができ、利便性が向上する。
次に熱拡散率測定装置100の利用者が、前記表示を参考とするなどにより、ステップS324で新たな加熱周波数fを図1の入力装置79を介して入力すると、ステップS208〜S232に制御装置70の実行が移り、制御装置70は新たな加熱周波数fに従って再び試料2の熱拡散率の測定動作を実行する。
仮に試料2の材料が正しく把握できなくても、制御装置70がステップS208〜S232に加えて上述のステップS314〜S324を実行することにより、適した加熱周波数fを設定でき、正確な真の熱拡散率αtを得ることができる。
ステップS314で測定された真の熱拡散率αtが予測した範囲内に含まれる場合には、制御装置70は測定結果が正しいと判断し、ステップS332に制御装置70の実行が移る。ステップS332では、熱拡散率測定装置100の利用者が、図14に示すステップS126やステップS128、ステップS134における演算や検索の履歴に関する出力を要求する。上述したように制御装置70は、前記ステップS208〜S232の実行の中で、図14に示すステップS126やステップS128、ステップS134を実行し、これらの実行によりフィッティング領域を決定し、該フィッティング領域を収束させる処理を行う。
利用者が制御装置70により行われたフィッティング領域の収束の経緯を検証することにより測定された真の熱拡散率αtの信頼性や問題点を検証することができる。例えば、図11に示す測定された位相遅れθのデータや、該データにおける線M1〜M3の設定の経緯や、図12や図13に示す検索の経緯を確認することにより、信頼性を確認でき、もし問題点があれば対応することが可能となる。ステップS332で位相遅れθの測定結果や検索の経緯の出力を要求する。なお要求の必要なければステップS332をスキップすることができる。
次のステップS334で前記出力要求の有無を判断し、要求があればステップS336を実行する。要求が無ければステップS338に制御装置70の実行が移る。ステップS336では出力要求に応じ、前記要求内容を出力装置78から出力する。図11に示す位相遅れθの測定結果や、図12や図13に示すデータベースのグラフや検索履歴を出力することで、熱拡散率測定装置100の利用者は単に測定結果としての真の熱拡散率αtの結果を得るだけでなく、測定の過程を知ることができる。本実施例では、図11や図12、図13の全てを出力する例を説明したが、これらの内必要なものだけをステップS332で選択的に要求することができ、制御装置70は要求されたものだけをステップS336で出力する。
ステップS338〜S342は、測定された真の熱拡散率αtを使用してさらに新たな物理量を演算する処理ステップである。例えば試料2の真の熱拡散率αtが測定できると新たな物理量として試料2の熱伝導率を得ることができる。ステップS338では、測定された真の熱拡散率αtを利用した新たな物理量を求める演算処理の要求する。ステップS338の入力方法として、新たな演算式を入力してもよい。さらに予め幾つかの演算式をメモリ80に保持し、利用者が保持している演算内容を表示して表示された中から選択するようにしても良い。このようにして測定結果を使用した新たな物理量の演算をステップS338で行う。なおステップS338は必要が無ければスキップすることができる。
ステップS340で新たな物理量の演算要求の有無を制御装置70が判断し、要求がある場合にステップS342で、要求された演算を行い、その結果を出力装置78から出力する。測定された真の熱拡散率αtを使用した熱伝導率の演算を例にあげると、測定された真の熱拡散率αtに試料2の比熱や密度を乗ずることにより、試料2の熱伝導率を演算することができる。
次にステップS344に制御装置70の実行が移り、図16に記載のフローチャートの実行を終了する。図16のフローチャートは、ステップS300で開始され、ステップS344で終了するが、これは代表的な動作例である。利用者の操作に基づき図16の途中ステップから制御装置70が動作を開始することができる。例えばステップS314の実行が終わり、測定された真の熱拡散率αtが出力された直後に、熱拡散率測定装置100の利用者が、加熱周波数fの変更を図1の入力装置79から行い、測定開始ステップの指示を入力装置79から行うと、制御装置70は新たに入力された加熱周波数fに従って試料2を加熱し、ステップS208〜S232の内の指示されたステップから実行を開始し、真の熱拡散率αtの測定を行い測定結果を出力する。このように図示していないが、入力装置79からの操作により、測定の途中であっても入力条件を変更して開始ステップを指示すると、制御装置70は入力された指示に従い、図14や図15、図16に示すステップの実行を、指示されたステップから開始する。このことにより、利用者は試料2に適した測定を、試行を繰り返しながら効率的に行うことができる。