JP6190828B2 - 医療用デバイスにおける使用のための安全特徴 - Google Patents
医療用デバイスにおける使用のための安全特徴 Download PDFInfo
- Publication number
- JP6190828B2 JP6190828B2 JP2014561181A JP2014561181A JP6190828B2 JP 6190828 B2 JP6190828 B2 JP 6190828B2 JP 2014561181 A JP2014561181 A JP 2014561181A JP 2014561181 A JP2014561181 A JP 2014561181A JP 6190828 B2 JP6190828 B2 JP 6190828B2
- Authority
- JP
- Japan
- Prior art keywords
- electrical switch
- switch
- electrical
- neuromodulator
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/18—Applying electric currents by contact electrodes
- A61N1/32—Applying electric currents by contact electrodes alternating or intermittent currents
- A61N1/36—Applying electric currents by contact electrodes alternating or intermittent currents for stimulation
- A61N1/3605—Implantable neurostimulators for stimulating central or peripheral nerve system
- A61N1/36128—Control systems
- A61N1/36142—Control systems for improving safety
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/18—Applying electric currents by contact electrodes
- A61N1/32—Applying electric currents by contact electrodes alternating or intermittent currents
- A61N1/36—Applying electric currents by contact electrodes alternating or intermittent currents for stimulation
- A61N1/372—Arrangements in connection with the implantation of stimulators
- A61N1/378—Electrical supply
- A61N1/3787—Electrical supply from an external energy source
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/02—Details
- A61N1/04—Electrodes
- A61N1/05—Electrodes for implantation or insertion into the body, e.g. heart electrode
- A61N1/0507—Electrodes for the digestive system
- A61N1/0509—Stomach and intestinal electrodes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/02—Details
- A61N1/04—Electrodes
- A61N1/05—Electrodes for implantation or insertion into the body, e.g. heart electrode
- A61N1/0551—Spinal or peripheral nerve electrodes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/18—Applying electric currents by contact electrodes
- A61N1/32—Applying electric currents by contact electrodes alternating or intermittent currents
- A61N1/36—Applying electric currents by contact electrodes alternating or intermittent currents for stimulation
- A61N1/3605—Implantable neurostimulators for stimulating central or peripheral nerve system
- A61N1/36053—Implantable neurostimulators for stimulating central or peripheral nerve system adapted for vagal stimulation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/18—Applying electric currents by contact electrodes
- A61N1/32—Applying electric currents by contact electrodes alternating or intermittent currents
- A61N1/36—Applying electric currents by contact electrodes alternating or intermittent currents for stimulation
- A61N1/3605—Implantable neurostimulators for stimulating central or peripheral nerve system
- A61N1/36125—Details of circuitry or electric components
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/18—Applying electric currents by contact electrodes
- A61N1/32—Applying electric currents by contact electrodes alternating or intermittent currents
- A61N1/36—Applying electric currents by contact electrodes alternating or intermittent currents for stimulation
- A61N1/372—Arrangements in connection with the implantation of stimulators
- A61N1/37211—Means for communicating with stimulators
- A61N1/37252—Details of algorithms or data aspects of communication system, e.g. handshaking, transmitting specific data or segmenting data
- A61N1/37276—Details of algorithms or data aspects of communication system, e.g. handshaking, transmitting specific data or segmenting data characterised by means for reducing power consumption during telemetry
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—ELECTRIC POWER NETWORKS; CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries
- H02J7/60—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries including safety or protection arrangements
- H02J7/663—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries including safety or protection arrangements using battery or load disconnect circuits
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—ELECTRIC POWER NETWORKS; CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries
- H02J7/60—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries including safety or protection arrangements
- H02J7/685—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries including safety or protection arrangements using connection detecting circuits
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—ELECTRIC POWER NETWORKS; CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries
- H02J7/90—Regulation of charging or discharging current or voltage
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/02—Details
- A61N1/025—Digital circuitry features of electrotherapy devices, e.g. memory, clocks, processors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/18—Applying electric currents by contact electrodes
- A61N1/32—Applying electric currents by contact electrodes alternating or intermittent currents
- A61N1/36—Applying electric currents by contact electrodes alternating or intermittent currents for stimulation
- A61N1/3605—Implantable neurostimulators for stimulating central or peripheral nerve system
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Neurology (AREA)
- Neurosurgery (AREA)
- Cardiology (AREA)
- Heart & Thoracic Surgery (AREA)
- Power Engineering (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Electrotherapy Devices (AREA)
- Gastroenterology & Hepatology (AREA)
Description
本発明は、電気信号を患者の解剖学的特徴に印加するためのシステムに関する。開示された概念の多くは、多種多様の治療(例えば、心臓組織に適用される電極を用いた心臓ペーシング)に適用可能であるが、本発明は、本発明が、肥満、膵炎、過敏性腸症候群、糖尿病、高血圧症、代謝性疾患、および炎症性疾患等の疾患の治療に関する、好ましい実施形態で説明される。最も好ましい実施形態では、本発明は、患者の迷走神経への高周波数信号の印加による、胃腸障害の治療に関する。
単独で、またはインパルスが神経に沿った伝搬のために生成される従来の電気神経刺激と組み合わせて、遮断療法を使用することができる。治療される疾患は、限定ではないが、機能的胃腸障害(FGID)(機能性消化不良(運動不全型)および過敏性腸症候群(IBS)等)、胃不全まひ、胃食道逆流症(GERD)、肥満、膵炎、糖尿病、高血圧症、代謝性疾患、炎症、不快感、および他の不調を含む。
好ましい実施形態において、本発明は、例えば、以下の項目を提供する。
(項目1)
安全性チェックを行うように構成されている医療デバイスであって、前記医療デバイスは、
第1の先端接続および第1のリング接続を含む第1の電気リード線と、
第2の先端接続および第2のリング接続を含む第2の電気リード線と、
電圧供給接続と、
フィールドプログラマブルゲートアレイと、
前記フィールドプログラマブルゲートアレイに電気的に接続されているマイクロプロセッサと、
第1の電流源と、
第1の接地接続と、
前記第1の電流源および前記第1の接地接続に電気的に接続されている第1の感知抵抗器と、
前記マイクロプロセッサおよび前記第1の電流源に電気的に接続されているデジタル・アナログ変換器と、
前記第1の感知抵抗器および前記マイクロプロセッサに電気的に接続されているアナログ・デジタル変換器と、
並列に接続されている第1の一対の直列電気スイッチおよび第2の一対の直列電気スイッチを含む第1のHブリッジ回路であって、前記フィールドプログラマブルゲートアレイ、前記電圧供給接続、前記第1の電流源、および前記第1の電気リード線に電気的に接続されている、第1のHブリッジ回路と
を備え、
前記第1の先端接続は、前記第1のHブリッジ回路の前記第1の一対の直列電気スイッチの間に電気的に接続され、
前記第1のリング接続は、前記第1のHブリッジ回路の前記第2の一対の直列電気スイッチの間に電気的に接続される、
医療デバイス。
(項目2)
前記デジタル・アナログ変換器に電気的に接続されている第2の電流源と、
第2の接地接続と、
前記第2の電流源および前記第2の接地接続に電気的に接続されている第2の感知抵抗器と、
前記第2の電流源と前記マイクロプロセッサとの間に電気的に接続されている第2のアナログ・デジタル変換器と、
前記マイクロプロセッサおよび前記第2の電流源に電気的に接続されている第2のデジタル・アナログ変換器と、
並列に接続されている第1の一対の直列電気スイッチおよび第2の一対の直列電気スイッチを含む第2のHブリッジ回路であって、前記フィールドプログラマブルゲートアレイ、前記電圧供給接続、前記第2の電流源、および前記第2の電気リード線に電気的に接続されている、第2のHブリッジ回路と、
をさらに備え、
前記第2の先端接続は、前記第2のHブリッジ回路の前記第1の直列電気スイッチの間に電気的に接続され、
前記第2のリング接続は、前記第2のHブリッジ回路の前記第2の一対の直列電気スイッチの間に電気的に接続される、
項目1に記載の医療デバイス。
(項目3)
前記マイクロプロセッサは、アナログ・デジタル変換器およびデジタル・アナログ変換器を通して各Hブリッジ回路に電気的に結合され、
前記第1のデジタル・アナログ変換器は、前記第1のHブリッジ回路と前記第1の電流感知抵抗器との間にある前記第1の電流源に電気的に接続され、前記第2のデジタル・アナログ変換器は、前記第2のHブリッジ回路と前記第2の電流感知抵抗器との間にある前記第2の電流源に電気的に接続され、
前記第1のアナログ・デジタル変換器は、前記第1の感知抵抗器に電気的に接続され、
前記第2のアナログ・デジタル変換器は、前記第2の感知抵抗器に電気的に接続され、
前記第1のアナログ・デジタル変換器および前記第2のアナログ・デジタル変換器は、前記第1の電流感知抵抗器および前記第2の電流感知抵抗器の各々にわたる電圧降下を示す信号を前記マイクロプロセッサに送信し、前記第1のデジタル・アナログ変換器および前記第2のデジタル・アナログ変換器は、前記第1の電流源および前記第2の電流源を制御する、
項目2に記載の医療デバイス。
(項目4)
前記マイクロプロセッサは、前記医療デバイスの動作中に前記Hブリッジ回路に一連の試験を定期的に行うが、前記デバイスの適正な動作を確実にするために治療が送達されている間は行わないように構成され、前記一連の試験が前記Hブリッジ回路の動作における異常を示す場合、前記マイクロプロセッサは、前記医療デバイスの使用を中止する、項目1〜3のいずれか一項に記載の医療デバイス。
(項目5)
前記マイクロプロセッサは、4秒毎に前記一連の試験を行うように構成される、項目4に記載の医療デバイス。
(項目6)
前記デバイスは、前記第1の電流源と接地との間に電気的に接続されている前記第1の電流感知抵抗器を通る電流を監視するように構成され、前記第1の電流感知抵抗器を通る電流は、前記2対の直列電気スイッチのうちの少なくとも一方内の両方の直列電気スイッチが前記試験中にアクティブであることを示す、項目1〜5のいずれか一項に記載の医療デバイス。
(項目7)
前記マイクロプロセッサは、前記電圧降下信号を処理することにより前記第1の感知抵抗器および前記第2の感知抵抗器を通る前記電流を決定するように構成され、治療を継続するか、または治療を中止するかを決める、項目1〜6のいずれか一項に記載の医療デバイス。
(項目8)
前記FPGAは、前記マイクロプロセッサからの信号に基づいて前記Hブリッジ回路のゲート入力の電圧を制御することにより、治療を継続または中止するように構成される、項目7に記載の医療デバイス。
(項目9)
前記第1のHブリッジ回路は、第1の電気スイッチ、第2の電気スイッチ、第3の電気スイッチ、および第4の電気スイッチを備え、前記第1の電気スイッチおよび前記第2の電気スイッチは、第1の一対を形成するように直列に接続され、前記第3の電気スイッチおよび前記第4の電気スイッチは、第2の一対を形成するように直列に接続され、前記第1の一対および前記第2の一対は、前記第1の電圧供給接続と前記第1の接地接続との間で互いに並列に接続される、項目1〜8のいずれか一項に記載の医療デバイス。
(項目10)
前記マイクロプロセッサおよび前記FPGAのうちの少なくとも1つは、
前記第1の電気スイッチおよび前記第2の電気スイッチを起動し、少なくとも前記第3の電気スイッチおよび前記第4の電気スイッチを動作停止し、
前記第3の電気スイッチおよび前記第4の電気スイッチを起動し、少なくとも前記第1の電気スイッチおよび前記第2の電気スイッチを動作停止し、
前記第1の電気スイッチおよび前記第3の電気スイッチを起動し、少なくとも前記第2の電気スイッチおよび前記第4の電気スイッチを動作停止し、
前記第2の電気スイッチおよび前記第4の電気スイッチを起動し、少なくとも前記第1の電気スイッチおよび前記第3の電気スイッチを動作停止する
ように構成される、
項目9に記載の医療デバイス。
(項目11)
前記第2のHブリッジ回路は、第5の電気スイッチ、第6の電気スイッチ、第7の電気スイッチ、および第8の電気スイッチを備え、前記第5の電気スイッチおよび前記第6の電気スイッチは、第3の一対を形成するように直列に接続され、前記第7の電気スイッチおよび前記第8の電気スイッチは、第4の一対を形成するように直列に接続され、前記第3の一対および前記第4の一対は、前記電圧供給接続と前記電流源との間で互いに並列に接続される、項目2〜10のいずれか一項に記載の医療デバイス。
(項目12)
前記マイクロプロセッサおよび前記FPGAのうちの少なくとも1つは、
前記第5の電気スイッチおよび前記第6の電気スイッチを起動し、前記第1の電気スイッチ、前記第2の電気スイッチ、前記第3の電気スイッチ、前記第4の電気スイッチ、前記第7の電気スイッチ、および前記第8の電気スイッチを動作停止し、
前記第7の電気スイッチおよび前記第8の電気スイッチを起動し、前記第1の電気スイッチ、前記第2の電気スイッチ、前記第3の電気スイッチ、前記第4の電気スイッチ、前記第5の電気スイッチ、および前記第6の電気スイッチを動作停止し、
前記第5の電気スイッチおよび前記第7の電気スイッチを起動し、前記第1の電気スイッチ、前記第2の電気スイッチ、前記第3の電気スイッチ、前記第4の電気スイッチ、前記第6の電気スイッチ、および前記第8の電気スイッチを動作停止し、
前記第6の電気スイッチおよび前記第8の電気スイッチを起動し、前記第1の電気スイッチ、前記第2の電気スイッチ、前記第3の電気スイッチ、前記第4の電気スイッチ、前記第5の電気スイッチ、および前記第7の電気スイッチを動作停止する
ように構成される、
項目11に記載の医療デバイス。
(項目13)
前記医療デバイスは、肥満、膵炎、過敏性腸症候群、糖尿病、高血圧症、代謝性疾患、炎症性疾患、およびそれらの組み合わせから成る群から選択される前記患者の複数の不調のうちの少なくとも1つを治療するために構成される、項目1〜12のいずれか一項に記載の医療デバイス。
(項目14)
患者への電流の出力を較正するように構成されている医療デバイスであって、前記医療デバイスは、
患者に埋め込まれるように、かつ神経において電気信号を導入するように構成されている第1の電気リード線であって、第1の先端接続および第1のリング接続を含む電極接続を有する、第1の電気リード線と、
患者に埋め込まれるように、かつ神経において電気信号を導入するように構成されている第2の電気リード線であって、第2の先端接続および第2のリング接続を含む電極接続を有する、第2の電気リード線と、
電圧源と、
前記第1の先端接続および前記第2の先端接続ならびに前記第1のリング接続および前記第2のリング接続の各々において、前記それぞれの電極接続と接地との間で直列に接続されている第1のキャパシタおよび第2のキャパシタと、
前記第1のキャパシタおよび前記第2のキャパシタの各々の間の場所に電気的に接続されているプログラマブル回路であって、前記プログラマブル回路は、プログラム命令を実行するように構成され、前記プログラム命令は、実行された場合、前記プログラム回路に、
前記第1の先端接続および前記第2の先端接続ならびに前記第1のリング接続および前記第2のリング接続の各々について、前記第1のキャパシタと前記第2のキャパシタとの間の初期容量比を計算させ、
前記プログラマブル回路と関連付けられているメモリに前記初期容量比の各々を記憶させ、
前記第1の電気リード線および前記第2の電気リード線を介した患者への電気治療の送達を開始することの前に、前記第1の先端接続および前記第2の先端接続ならびに前記第1のリング接続および前記第2のリング接続の各々について、前記第1のキャパシタと前記第2のキャパシタとの間の第2の容量比を計算させ、
容量分割器ネットワークの完全性を立証するように、前記第2の容量比の各々を対応する前記初期容量比と比較させる、
プログラマブル回路と
を備える、医療デバイス。
(項目15)
前記プログラマブル回路は、マイクロプロセッサを備え、前記第1のキャパシタおよび前記第2のキャパシタの各々の間の場所は、前記マイクロプロセッサの汎用入出力ピンに電気的に接続される、項目14に記載の医療デバイス。
(項目16)
前記プログラマブル回路は、前記第1の先端接続および前記第2の先端接続ならびに前記第1のリング接続および前記第2のリング接続の各々と関連付けられる前記初期容量比に基づいて、平均初期容量比を計算するようにさらに構成される、項目14または項目15に記載の医療デバイス。
(項目17)
前記プログラマブル回路は、前記初期容量比のうちのいずれかが所定量よりも大きく前記平均初期容量比と異なるかどうかを決定し、該当する場合、前記出力電流の較正を中止し、前記電気治療の送達を一時停止するようにさらに構成される、項目16に記載の医療デバイス。
(項目18)
前記所定量は、前記平均初期容量比からの約10%変動を含む、項目17に記載の医療デバイス。
(項目19)
前記プログラマブル回路は、前記第2の容量比のうちのいずれかが所定量よりも大きく前記平均初期容量比と異なるかどうかを決定し、該当する場合、前記出力電流の較正を中止し、前記電気治療の送達を一時停止するようにさらに構成される、項目14〜18のいずれか一項に記載の医療デバイス。
(項目20)
医療デバイスであって、前記医療デバイスは、
i)埋込型神経調節器であって、前記埋込型神経調節器は、
a)温度センサと、
b)再充電可能バッテリと、
c)前記埋込型神経調節器の基準温度を取得するように、前記バッテリの充電レベルを取得するように、バッテリの種類を確認するように、前記バッテリを充電するために充電のレベルを決定するように、かつ前記バッテリに対する一定充電速度および/または前記バッテリに対する可変充電速度のうちから選択するように構成されているマイクロプロセッサであって、
d)充電の受入、充電のレベル、充電の一定速度または可変速度、および外部構成要素への充電の持続時間を示す通信を送るように構成されているマイクロプロセッサであって、
e)前記温度の上昇速度または前記温度が前記基準温度と比較して所定の最大値を超えるかどうかを決定するように構成され、外部充電器に通信することにより電荷を送ることを停止するように、または、前記温度上昇速度が所定の最大値を超える場合または前記温度が所定の最大値を超える場合に、充電の電力レベルを変化させるように構成されている、マイクロプロセッサと
を備える、埋込型神経調節器と、
ii)前記埋込型神経調節器によって選択されているレベルで前記バッテリを充電するための電荷を生成するように構成され、前記埋込型神経調節器による要求に応じて前記充電レベルを改変するように構成され、一定速度または可変速度で電荷を送達するように構成され、かつ前記埋込型神経調節器による要求に応じて充電を停止するように構成される、外部充電器と
を備える、医療デバイス。
(項目21)
前記温度上昇速度の前記所定の限界は、毎時間約2℃以上である、項目20に記載の医療デバイス。
(項目22)
最高温度は、39℃である、項目20または項目21に記載の医療デバイス。
(項目23)
前記埋込型神経調節器は、前記埋込型神経調節器の前記温度が39℃を超えるため、または前記温度上昇速度が毎時間約2℃以上であるために前記埋込型神経調節器が電荷を受け入れないという通信を送るように構成される、項目20〜22のいずれか一項に記載の医療デバイス。
(項目24)
前記外部構成要素は、少なくとも16の異なる電力レベルを有するように構成される、項目20〜23のいずれか一項に記載の医療デバイス。
(項目25)
前記マイクロプロセッサは、前記埋込型神経調節器の前記温度、前記バッテリの前記充電レベル、充電セッション中の前記埋込型神経調節器の前記温度上昇速度を連続的に監視するように、かつ前記埋込型神経調節器の前記温度上昇速度が所定の速度を超える場合、または前記バッテリ充電レベルが所定のレベルにある場合に、前記外部充電器に通信することにより前記充電レベルを改変するように構成される、項目20〜24のいずれか一項に記載の医療デバイス。
(項目26)
医療デバイスであって、前記医療デバイスは、
埋込型神経調節器
を含み、
前記埋込型神経調節器は、マイクロプロセッサを含み、
前記マイクロプロセッサは、集積回路および/または水晶発振器と、抵抗キャパシタ回路クロックと、プログラマブル回路とを含み、
前記プログラマブル回路は、プログラム命令を実行するように構成され、
前記プログラム命令は、実行された場合、前記プログラマブル回路に、
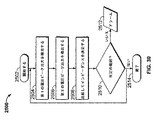
定義された期間中の前記集積回路および/または前記水晶発振器の発振器遷移の実際の数を数えさせ、
発振器遷移の前記実際の数を発振器遷移の期待数と比較させ、
前記数が範囲外であるかどうかを決定させ、前記期待数と前記実際の数との間の差を決定することによってOscValueを計算させ、
制御レジスタを、前記定義された期間中の実際の発振器遷移における変化を示す値に設定させ、
前記制御レジスタ内の前記値に基づいて、集積回路クロックの発振を調整させる、
医療デバイス。
(項目27)
前記集積回路は、リアルタイムクロックである、項目26に記載の医療デバイス。
(項目28)
前記抵抗キャパシタ回路は、所定の周波数でクロック信号を生成する、項目26または27に記載の医療デバイス。
(項目29)
医療デバイスであって、前記医療デバイスは、
埋込型神経調節器を
備え、
前記埋込型神経調節器は、マイクロプロセッサを含み、
前記マイクロプロセッサは、集積回路および/または水晶発振器と、抵抗キャパシタ回路クロックと、プログラマブル回路とを含み、
前記プログラマブル回路は、プログラム命令を実行するように構成され、
前記プログラム命令は、実行された場合、前記プログラマブル回路に、
前記抵抗キャパシタ回路クロックを調整する必要性を決定するように、設定された数の抵抗キャパシタ回路クロックサイクルにおけるダウンリンク搬送周波数発振の数を数えさせ、
前記ダウンリンク搬送周波数の実際の発振周波数が、期待されるダウンリンク搬送周波数発振とは異なるかどうかを決定させ、
前記期待されるダウンリンク搬送周波数発振からの前記実際のダウンリンク搬送周波数発振の何らかの差に基づいて、抵抗キャパシタ回路クロック発振を調整させる、
医療デバイス。
(項目30)
前記ダウンリンク搬送周波数は、外部デバイスから前記神経調節器へ通信されるデータ信号の搬送周波数である、項目29に記載の医療デバイス。
a. 神経調節器
神経調節器104、104’の異なる実施形態が、それぞれ、図2Aおよび2Bで概略的に図示されている。神経調節器104、104’は、患者の体内で皮下に埋め込まれるように構成される。好ましくは、神経調節器104、104’は、軸線のわずかに前方にあり、かつ脇の下の後方にある領域中の胸側壁上で皮下に埋め込まれる。他の実施形態では、代替的な埋込場所が、埋込外科医によって決定されてもよい。
例示的な外部充電器101のブロック図が、図4に示されている。例示的な外部充電器101は、治療を患者に提供するように、上記で議論される神経調節器104、104’のうちのいずれかと協働してもよい。外部充電器101は、(例えば、RFリンクを介して)所望の治療パラメータおよび治療スケジュールを神経調節器104に伝送するように、かつ神経調節器104からデータ(例えば、患者データ)を受信するように構成される。外部充電器101はまた、エネルギーを神経調節器104に伝送して治療信号の生成に電力供給するように、かつ/または神経調節器104の内部バッテリ151を再充電するように構成される。外部充電器101はまた、外部コンピュータ107と通信することもできる。
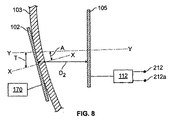
外部充電器101は、外部および埋込コイル102、105の相対位置の整合、および信号強度の最適化を可能にする。コイル102、105の整合および伝送信号の電力を最適化することにより、電力および/または情報の連続的な経皮伝送を促進する。
一般に、外部コイル102は、埋込内部コイル105の上を覆って、(例えば、接着剤によって)患者の皮膚の上に配置されるように適合される。コイル102、105の位置および配向は、信号の信頼性に影響を及ぼし得る。加えて、外部コイル102と埋込コイル105との間の伝送信号の強度もまた、コイル102、105の間の距離による影響を受ける。神経調節器104を皮膚103の表面に非常に近く埋め込むことにより、典型的には、信号強度の広い拡張した範囲をもたらす。逆に、皮膚103の下に距離を置いて神経調節器104を埋め込むことにより、概して弱い伝送リンクおよび信号強度の圧縮範囲をもたらす。
神経調節器104で受電される電力の量は、外部コイル102の初期配置後のコイル102、105の相対的移動により、変化し得る。例えば、信号強度は、コイル102、105の間の距離、コイル102、105の横方向整合、および/またはコイル102、105の平行整合に基づいて変化し得る。一般に、コイル102、105の間の距離が大きくなるほど、伝送信号が弱くなるであろう。極端な場合、伝送信号の強度は、治療を提供する神経調節器104の能力を阻止するように十分減少し得る。
1. 基準温度以上に最高安全温度上昇を超えることなく、充電間隔の無制限の長さを可能にするように選択される、調節された(一定の)充電速度を使用する、または
2. 基準温度以上に最高安全温度上昇を超えることなく、有限の(固定されているがプログラム可能な)充電間隔(典型的には、長さが1時間)にわたって充電効率を最大限化するように選択される、適応(充電セッションの全体を通して可変の)充電速度を使用する。
a)埋込型デバイスがバッテリ充電エネルギーの印加を受け入れるであろう
b)最小レベルから最大レベル(典型的には、16のレベル)までの多重レベルスケールを使用して送信するエネルギーのレベル
c)(典型的には、秒単位の)どれだけ長くエネルギーを印加するかという続時間
1. 外部充電器は、バッテリ充電エネルギーの印加を受け入れるであろうと示す場合に、充電エネルギーを受信埋込型デバイスに送達するのみであろう。
2. 外部充電器は、充電器にプログラムされる最小から最大のレベル(典型的には、16のレベル)までの多重レベルスケールに基づいて、受信埋込型デバイスによって要求されるエネルギーのレベルを送達するのみであろう。
3. 外部充電器は、(典型的には、秒単位の)埋込型デバイスによって要求される持続時間にわたって充電エネルギーを送達するのみであろう。次いで、それは、停止して、受信デバイスからの別の要求を待つ。
図9は、リード線106(図1参照)等の双極リード線の例示的な遠位端を示す。リード線106は、神経(例えば、迷走神経)を受容するように曲線状である、リード線本体210を含む。リード線本体210は、リード線本体210内で受容される神経と接触するように構成される、露出先端電極212を含有する。先端電極212は、約1ミリメートルから約4ミリメートルに及ぶ直径を有する神経に電荷を送達することが可能である。
電極は、例えば、迷走神経、腎動脈、腎神経、腹腔神経叢、内臓神経、心臓交感神経、T10からL5の間を起源とする脊髄神経、舌咽神経、および圧受容器を含有する神経を含む、任意の数の神経の上に配置することができる。例証目的で、電極の配置は、迷走神経に関して説明される。図10は、患者の食道Eの長さに沿って延在する後迷走神経PVNおよび前迷走神経AVNを示す。後神経PVNおよび前AVNは、概して、患者の横隔膜(図示せず)の直下の食道Eの正反対側にある。リード線配列108(図1)の第1の先端電極212は、前迷走神経AVNの上に配置される。リード線配列108の第2の電極212aは、後迷走神経PVNの上に配置される。電極212、212aは、リード線106、106aによって神経調節器104(図1)に接続される。
第1の遮断電極構成は、図11に示され、本明細書で説明されるような任意の種類の神経に印加することができる。迷走神経に関して、この構成は、前および後神経AVN、PVNの間で流動する電流を伴う電流経路(図11の矢印1を参照)を生成する。それぞれ、前および後神経AVN、PVNの上に直接位置する、先端電極212、212aは、電気的に活性である。陽極リング電極218、218aは、通電させられない。
図13は、先端電極212、212aのそれぞれが、それぞれ、陽極電極218、218aと関連付けられる、第2の遮断電極構成を図示する。迷走神経に関して、治療信号は、遠位電極212と陽極電極218との間で前迷走神経AVNのみに印加される。有利なことには、電流(図13の矢印2を参照)は、食道Eを通って流動せず、それによって、患者が治療を感知する(例えば、不快感または疼痛を感じる)可能性を減少させる。
図15は、信号が先端電極212aと陽極電極218aとの間で後迷走神経PVNのみに印加されることを除いて、図13に示される同一の電極構成を図示する。対応する電流経路が、図15で矢印3によって示されている。一実施形態では、電流経路を横断して伝搬する例示的な信号波形W12(図16参照)は、図14の波形W11と同一である。しかしながら、他の実施形態では、任意の所望の波形を利用することができる。
図17の電極構成は、概して、図11、13、および15の電極構成と同一である。しかしながら、図17では、電気的に活性な陽極(例えば、リング電極218、218a)および陰極(例えば、先端電極212、212a)が、二重チャネルシステムを提供するように各神経と関連付けられる。迷走神経に関して、そのような電極配列は、矢印4によって示されるように、両方の神経PVN、AVNを通して電流を送る。
神経調節器104および電極配列108の埋込、組立、および位置付けを完了した後、医師は、リード線インピーダンスを測定し、リード線インピーダンスが許容範囲内であるかどうかを査定することによって、リード線の完全性を決定することができる。リード線インピーダンスが範囲内である場合、医師は、外部コンピュータ107(例えば、臨床医コンピュータ)を外部充電器101(図1参照)に接続することができる。
外部充電器101および神経調節器104は、本明細書で説明されるような種々の治療スケジュール、動作モード、システム監視、およびインターフェースでの治療システム100の使用を可能にするソフトウェアを含有する。
治療計画を開始するために、臨床医は、外部コンピュータ107から外部充電器101へ治療仕様および治療スケジュールをダウンロードする。一般に、治療仕様は、神経調節器104の構成値を示す。例えば、肥満に対する迷走神経治療の場合、治療仕様は、埋込神経調節器104によって発信される電気信号の振幅、周波数、およびパルス幅を定義してもよい。別の実施形態では、「上昇」時間(すなわち、その間に電気信号が標的振幅まで増大する期間)および「下降」時間(すなわち、その間に信号が標的振幅からゼロまで減少する期間)を特定することができる。
治療システム100は、本明細書で説明されるように、2つの基本動作モード、つまり、訓練モードおよび治療モードに構成することができる。一実施形態では、治療システム100はまた、臨床試験で使用するためのプラセボモードに構成することもできる。
訓練モードは、治療システム100の使用について患者を訓練するために術後に使用される。このモードでは、電気信号は、遮断活動電位を生成する目的で神経に送達されない。好ましい実施形態では、神経調節器104は、いかなる電気信号も生成しない。いくつかの実施形態では、訓練療法設定は、治療システム製造業者によって事前設定することができ、訓練医師に利用不可能である。
治療モードは、神経調節器104が遮断療法設定を使用して遮断信号を神経に印加する、神経調節器104の通常動作モードである。一般に、治療設定は、患者の特定の必要性および患者の食事のタイミングに基づいて、医師によって特定される。いくつかの実施形態では、神経調節器104は、神経調節器104上に記憶されている治療プログラムおよびスケジュールに従って提供されている、治療を制御する。他の実施形態では、神経調節器104は、治療を送達するように外部充電器101の命令に従う。
このモードは、無作為化二重盲検臨床試験でプラセボ治療に無作為化される患者に、または電気信号療法の目標を達成した患者に使用されてもよい。このモードでは、神経調節器104は、治療信号をリード線配列108に印加しない。むしろ、異なる実施形態では、治療信号は、神経調節器104の内部電源151(図3)を消耗するダミー抵抗器に供給することができる。
神経調節器104は、治療信号を電極配列108に提供するように構成される。一般に、治療信号は、神経の刺激、神経インパルスの遮断、または2つの何らかの組み合わせを誘発することができる。
治療中に、神経調節器104は、遮断信号を患者の神経に提供する。遮断信号は、神経に沿った信号の伝送を阻止する、高周波数波形を含む。一般に、医師は、食事時間および患者の摂食パターンに基づいて、治療設定(例えば、波形特性および治療スケジュール)を選択および設定する。一実施形態では、治療システム100は、毎日の治療スケジュールの一部として印加することができる、少なくとも3つの独特な遮断療法設定の選択を提供することができる。
低周波数モードは、術中画面として、簡潔で潜在的に観察可能な生理学的応答を生成するように、患者の神経に沿って低周波数刺激信号を提供する。そのような生理学的応答は、例えば、胃等の筋肉または臓器のけいれんであり得る。代替として、舌咽および/または圧受容器等のいくつかの神経の種類に、低周波数上方調節信号が利用される。
治療システム100は、「1回きりの」生理学的評価を支持するように特別治療/検査治療設定をプログラムする能力を有する。特別検査治療パラメータは、医師によって利用可能となるように(例えば、製造業者によって)事前設定することができる。
いくつかの実施形態では、治療システム100は、治療システム100およびその構成要素の動作を監視することを促進する。治療システム100の動作を監視することによって、故障および誤動作を早期に捕捉し、問題になる前に対処することができる。治療システム100は、以降の分析のために、動作および/または故障状態を記録することができる。治療システム100はまた、システム動作状態および不順守状態について患者および/または医師に通知することもできる。例えば、エラーメッセージを、外部充電器101の画面172(図5参照)上に、または外部コンピュータデバイス107(図1参照)の表示画面(図示せず)上に表示することができる。
治療システム100の実施形態は、リード線インピーダンス値を独立して測定および記録する能力を有する。事前に定義された範囲外のリード線インピーダンス値は、治療システム100内の問題または誤動作を示してもよい。高いインピーダンスは、例えば、電極212、212aが患者の神経に適正に結合されていないことを意味することができる。低インピーダンスは、電極212、212aの不適切な短絡を意味することができる。
a. Hブリッジ安全性チェック
上記で説明されるように、電気回路を含む治療システム100が、電気刺激を患者に印加するために利用される場合、電気刺激の適正な動作を確実にするために、安全性チェックを実装することが望ましい。具体的には、種々の刺激療法のより安全な適用を増加させることを目的としている方法およびシステムを通して、患者の神経、筋肉、組織、および同等物への損傷から保護することが重要である。
別の実施形態では、医療デバイスは、第1の先端接続および第1のリング接続を含む第1の電気リード線と、第2の先端接続および第2のリング接続を含む第2の電気リード線と、神経に印加される出力電圧を監視して直流オフセットを検出するように構成されるインピーダンス測定デバイスとを備える。実施形態では、直流が検出された場合、医療デバイスの使用が中断される。実施形態では、インピーダンス測定デバイスは、神経に印加される正および負の電圧の間の対称性について、出力電圧を監視するように構成される。他の実施形態では、インピーダンス測定デバイスは、所定の期間にわたる出力電圧の累積相加効果を監視する。
本開示の別の側面は、クロック精度調整回路を提供する。埋込型神経調節器は、図3A−3Bで例示されるような、およびCPU154として識別されるようなマイクロプロセッサを含む。マイクロプロセッサの活動は、クロック信号によって同期化される。典型的には、水晶圧電発振器が、マイクロプロセッサ用のクロック信号を生成するために使用される。場合によっては、抵抗器キャパシタ(RC)回路が、マイクロプロセッサ用のクロック信号を生成するために使用される。水晶発振器は、概して、RC回路が経時的に偏流し得るため、RC回路より正確である。偏流は、治療を間違った時間に印加させるか、または治療を誤って印加させ得る。水晶発振器は、RC回路より多くの電力を消費する。これらの種類の発振器は、長持ちするバッテリを有することを目的としている低電力システムで使用することができない。バッテリの寿命は、医療デバイスの電力消費を最小限化することによって延長させることができる。
それを用いて医師が治療構成およびスケジュールをプログラムすることができる、プログラマソフトウェアが、外部充電器101と通信する外部コンピュータデバイス107(図1)の上に存在し、それと互換性がある。一般に、コンピュータデバイス107用のアプリケーションソフトウェアは、要求に応じて、一般的に容認されているデータファイル形式で記憶された治療プログラムを生成することが可能である。
ある実施形態では、プログラミングインターフェースは、少なくとも2つのアクセスのレベル、つまり、医師に対する1つのレベル、およびシステム製造業者に対する1つのレベルを定義する。プログラミングインターフェースは、どのアクセスのレベルを要求側が有するかに応じて、異なる種類の情報を要求側に提供することができる。例えば、プログラミングインターフェースは、システム製造業者が、医師によって調整することができないシステム設定(例えば、治療パラメータのデフォルト値、治療パラメータの許容範囲、および/またはシステム設定、システム公差等)をプログラムすることを可能にしてもよい。
神経は、長期間にわたって電流(例えば、電気刺激からの正味電流)を指向するように露出されたときに損傷され得る。そのような損傷は、長期間にわたって作用する非常に小さい正味電流、例えば、数分にわたる数マイクロアンペアの電流に起因し得る。例えば、電極構成要素値の固有差による、電極212、212a(図1)での電圧蓄積によって、直流を引き起こすことができる。
図20−24を参照すると、いくつかのサイクルにわたって治療信号パルス2000のパルス幅PWに補正を適用することによって、患者の神経への電荷または電流の平衡を保つことができる(図20参照)。サイクルとは、パルスの単一の反復を指す。補正は、ある期間にわたってパルス幅を増加または減少させるように、「タイマチック」を治療信号パルス2000の少なくとも1つの位相のパルス幅PWに追加すること、または差し引くことを含む。一実施形態では、例示的なタイマチックは、印加されたクロック周波数(例えば、約560ナノ秒)の最小分解能と同等になることができる。
電荷平衡を達成するためのある処理は、例えば、波形の第1の部分によって提供される負の電荷が、波形の第2の部分によって提供される正の電荷によって平衡を保たれる、二相パルスの使用を伴ってきた。電荷平衡を達成するための電荷短絡の使用を説明する、さらなる詳細は、その開示が参照することにより本明細書に組み込まれる、1985年2月12日に発行されたBourgeoisに対する米国特許第4,498,478号、1986年6月3日に発行されたGalbraithに対する米国特許第4,592,359号、および1998年5月26日に発行されたDalyらに対する米国特許第5,755,747号で見出すことができる。
神経調節器104(図3)の設計は、リード線配列108(例えば、前および後リード線106、106aの両方の先端電極212、212aおよび/またはリング電極218および218a)に存在する電圧を測定するように、容量分割器162および出力モジュール161を含む。出力モジュール161は、4つの電極構成(図11、13、15、および17参照)のうちのいずれかで配列される電極を通る電流を測定することができる。プログラム可能な電流源(図示せず)は、どのようにして電流が電極212、212a、218、および218aを通して神経に送達されるかを医師が選択することを可能にすることができる。
遮断療法が効果的になるために、患者が治療の開始時に容認可能と感知するレベルを超えて、エネルギー送達が増加させられる必要があり得る。治療信号の電力は、患者がより強力な治療信号に慣れることを可能にするように、わずかな増分で増加させることができる。
1つ以上の治療プログラムを、外部コンピュータ107のメモリに記憶することができる。治療プログラムは、所定のパラメータおよび治療送達スケジュールを含む。例えば、各治療プログラムは、出力電圧、周波数、パルス幅、上昇速度、下降速度、およびオン・オフサイクル期間を特定することができる。一実施形態では、上昇速度および下降速度は、個別および別々にプログラムすることができる。
一般に、神経調節器104は、治療スケジュールに従って治療の送達を促進するように、時間基準を有することができる。この時間基準を決定するために、神経調節器104は、治療システム100の動作を示す、1つ以上の動作ログを維持することができる。
神経遮断療法は、胃が空になる速度および腸運動のレベルに影響を及ぼし得る。肥満制御のための神経遮断療法を適用するとき、患者が食物を摂取する近似時間(すなわち、食事時間)および各食事で消費されている食物の近似量を決定することが望ましい。有利なことには、この情報を用いて、治療システム100の負荷サイクルを食事時間と同期化することができる。加えて、消費されている食物の量に従って、治療の性質を調整することができる。例えば、食物検出は、その開示が参照することにより本明細書に組み込まれる、1993年11月23日に発行されたWernickeらに対する米国特許第5,263,480号で説明されている。
本特許出願で説明される治療の適用に起因する体重低減は、患者において幸福感の増加を生じると見込まれ、おそらく、患者が快適である活動の量の増加が関与する。
Claims (10)
- 安全性チェックを行うように構成されている医療デバイスであって、前記医療デバイスは、
第1の先端接続および第1のリング接続を含む第1の電気リード線と、
第2の先端接続および第2のリング接続を含む第2の電気リード線と、
電圧供給接続と、
フィールドプログラマブルゲートアレイと、
前記フィールドプログラマブルゲートアレイに電気的に接続されているマイクロプロセッサと、
第1の電流源と、
第1の接地接続と、
前記第1の電流源および前記第1の接地接続に電気的に接続されている第1の感知抵抗器と、
前記マイクロプロセッサおよび前記第1の電流源に電気的に接続されているデジタル・アナログ変換器と、
前記第1の感知抵抗器および前記マイクロプロセッサに電気的に接続されているアナログ・デジタル変換器と、
第1の電気スイッチ、第2の電気スイッチ、第3の電気スイッチ、および第4の電気スイッチを含む第1のHブリッジ回路であって、前記第1の電気スイッチおよび前記第2の電気スイッチは、第1の一対を形成するように直列に接続されており、前記第3の電気スイッチおよび前記第4の電気スイッチは、第2の一対を形成するように直列に接続されており、前記第1の一対および前記第2の一対は、前記電圧供給接続と前記第1の接地接続との間で互いに並列に接続されており、前記第1のHブリッジ回路は、前記フィールドプログラマブルゲートアレイ、前記電圧供給接続、前記第1の電流源、および前記第1の電気リード線に電気的に接続されている、第1のHブリッジ回路と
を備え、
前記第1の先端接続は、前記第1のHブリッジ回路の前記第1の一対の直列電気スイッチの間に電気的に接続されており、
前記第1のリング接続は、前記第1のHブリッジ回路の前記第2の一対の直列電気スイッチの間に電気的に接続されており、
前記マイクロプロセッサまたは前記フィールドプログラマブルゲートアレイは、前記医療デバイスの動作中に前記Hブリッジ回路に一連の試験を定期的に行うが、前記デバイスの適正な動作を確実にするために治療が送達されている間は行わないように構成されており、
前記一連の試験中に、前記マイクロプロセッサおよび前記フィールドプログラマブルゲートアレイのうちの少なくとも1つは、
前記第1の電気スイッチおよび前記第2の電気スイッチを起動し、少なくとも前記第3の電気スイッチおよび前記第4の電気スイッチを動作停止し、
前記第3の電気スイッチおよび前記第4の電気スイッチを起動し、少なくとも前記第1の電気スイッチおよび前記第2の電気スイッチを動作停止し、
前記第1の電気スイッチおよび前記第3の電気スイッチを起動し、少なくとも前記第2の電気スイッチおよび前記第4の電気スイッチを動作停止し、
前記第2の電気スイッチおよび前記第4の電気スイッチを起動し、少なくとも前記第1の電気スイッチおよび前記第3の電気スイッチを動作停止する
ように構成されており、
前記一連の試験が前記Hブリッジ回路の動作における異常を示す場合、前記マイクロプロセッサまたは前記フィールドプログラマブルゲートアレイは、前記医療デバイスの使用を中止する、
医療デバイス。 - 前記デジタル・アナログ変換器に電気的に接続されている第2の電流源であって、前記デジタル・アナログ変換器は前記マイクロプロセッサに電気的に接続されている、第2の電流源と、
第2の接地接続と、
前記第2の電流源および前記第2の接地接続に電気的に接続されている第2の感知抵抗器と、
前記第2の電流源と前記マイクロプロセッサとの間に電気的に接続されている第2のアナログ・デジタル変換器と、
並列に接続されている第1の一対の直列電気スイッチおよび第2の一対の直列電気スイッチを含む第2のHブリッジ回路であって、前記フィールドプログラマブルゲートアレイ、前記電圧供給接続、前記第2の電流源、および前記第2の電気リード線に電気的に接続されている、第2のHブリッジ回路と
をさらに備え、
前記第2の先端接続は、前記第2のHブリッジ回路の前記第1の一対の直列電気スイッチの間に電気的に接続されており、
前記第2のリング接続は、前記第2のHブリッジ回路の前記第2の一対の直列電気スイッチの間に電気的に接続されている、
請求項1に記載の医療デバイス。 - 前記マイクロプロセッサは、アナログ・デジタル変換器およびデジタル・アナログ変換器を通して各Hブリッジ回路に電気的に結合されており、
前記デジタル・アナログ変換器は、前記第1のHブリッジ回路と前記第1の電流感知抵抗器との間にある前記第1の電流源に電気的に接続されており、前記デジタル・アナログ変換器は、前記第2のHブリッジ回路と前記第2の電流感知抵抗器との間にある前記第2の電流源に電気的に接続されており、
前記第1のアナログ・デジタル変換器は、前記第1の感知抵抗器に電気的に接続されており、
前記第2のアナログ・デジタル変換器は、前記第2の感知抵抗器に電気的に接続されており、
前記第1のアナログ・デジタル変換器および前記第2のアナログ・デジタル変換器は、前記第1の電流感知抵抗器および前記第2の電流感知抵抗器の各々にわたる電圧降下を示す信号を前記マイクロプロセッサに送信し、前記デジタル・アナログ変換器は、前記第1の電流源および前記第2の電流源を制御する、
請求項2に記載の医療デバイス。 - 前記マイクロプロセッサまたは前記フィールドプログラマブルゲートアレイは、4秒毎に前記一連の試験を行うように構成されている、請求項1〜3のいずれか一項に記載の医療デバイス。
- 前記デバイスは、前記第1の電流源と接地との間に電気的に接続されている前記第1の電流感知抵抗器を通る電流を監視するように構成されており、前記第1の電流感知抵抗器を通る電流は、前記2対の直列電気スイッチのうちの少なくとも一方内の両方の直列電気スイッチが前記一連の試験中にアクティブであることを示す、請求項1〜4のいずれか一項に記載の医療デバイス。
- 前記マイクロプロセッサは、前記電圧降下信号を処理することにより前記第1の感知抵抗器および前記第2の感知抵抗器を通る前記電流を決定するように構成されており、治療を継続するか、または治療を中止するかを決める、請求項1〜5のいずれか一項に記載の医療デバイス。
- 前記フィールドプログラマブルゲートアレイは、前記マイクロプロセッサからの信号に基づいて前記Hブリッジ回路のゲート入力の電圧を制御することにより、治療を継続または中止するように構成されている、請求項6に記載の医療デバイス。
- 前記第2のHブリッジ回路は、第5の電気スイッチ、第6の電気スイッチ、第7の電気スイッチ、および第8の電気スイッチを備え、前記第5の電気スイッチおよび前記第6の電気スイッチは、第3の一対を形成するように直列に接続されており、前記第7の電気スイッチおよび前記第8の電気スイッチは、第4の一対を形成するように直列に接続されており、前記第3の一対および前記第4の一対は、前記電圧供給接続と前記電流源との間で互いに並列に接続されている、請求項2〜7のいずれか一項に記載の医療デバイス。
- 前記マイクロプロセッサおよび前記フィールドプログラマブルゲートアレイのうちの少なくとも1つは、
前記第5の電気スイッチおよび前記第6の電気スイッチを起動し、前記第1の電気スイッチ、前記第2の電気スイッチ、前記第3の電気スイッチ、前記第4の電気スイッチ、前記第7の電気スイッチ、および前記第8の電気スイッチを動作停止し、
前記第7の電気スイッチおよび前記第8の電気スイッチを起動し、前記第1の電気スイッチ、前記第2の電気スイッチ、前記第3の電気スイッチ、前記第4の電気スイッチ、前記第5の電気スイッチ、および前記第6の電気スイッチを動作停止し、
前記第5の電気スイッチおよび前記第7の電気スイッチを起動し、前記第1の電気スイッチ、前記第2の電気スイッチ、前記第3の電気スイッチ、前記第4の電気スイッチ、前記第6の電気スイッチ、および前記第8の電気スイッチを動作停止し、
前記第6の電気スイッチおよび前記第8の電気スイッチを起動し、前記第1の電気スイッチ、前記第2の電気スイッチ、前記第3の電気スイッチ、前記第4の電気スイッチ、前記第5の電気スイッチ、および前記第7の電気スイッチを動作停止する
ように構成されている、
請求項8に記載の医療デバイス。 - 前記医療デバイスは、肥満、膵炎、過敏性腸症候群、糖尿病、高血圧症、代謝性疾患、炎症性疾患、およびそれらの組み合わせから成る群から選択される前記患者の複数の不調のうちの少なくとも1つを治療するために構成されている、請求項1〜9のいずれか一項に記載の医療デバイス。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201261608949P | 2012-03-09 | 2012-03-09 | |
| US61/608,949 | 2012-03-09 | ||
| PCT/US2013/030188 WO2013134763A2 (en) | 2012-03-09 | 2013-03-11 | Safety features for use in medical devices |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017036156A Division JP2017087074A (ja) | 2012-03-09 | 2017-02-28 | 医療用デバイスにおける使用のための安全特徴 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015509442A JP2015509442A (ja) | 2015-03-30 |
| JP6190828B2 true JP6190828B2 (ja) | 2017-08-30 |
Family
ID=47915363
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014561181A Expired - Fee Related JP6190828B2 (ja) | 2012-03-09 | 2013-03-11 | 医療用デバイスにおける使用のための安全特徴 |
| JP2017036156A Withdrawn JP2017087074A (ja) | 2012-03-09 | 2017-02-28 | 医療用デバイスにおける使用のための安全特徴 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017036156A Withdrawn JP2017087074A (ja) | 2012-03-09 | 2017-02-28 | 医療用デバイスにおける使用のための安全特徴 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US9393420B2 (ja) |
| EP (2) | EP2822649B1 (ja) |
| JP (2) | JP6190828B2 (ja) |
| CN (2) | CN107029349A (ja) |
| AU (2) | AU2013202807B2 (ja) |
| WO (1) | WO2013134763A2 (ja) |
Families Citing this family (105)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12343530B2 (en) | 2006-05-18 | 2025-07-01 | Paras Holdings, Llc | Device and implantation system for electrical stimulation of biological systems |
| US9020597B2 (en) | 2008-11-12 | 2015-04-28 | Endostim, Inc. | Device and implantation system for electrical stimulation of biological systems |
| US9724510B2 (en) | 2006-10-09 | 2017-08-08 | Endostim, Inc. | System and methods for electrical stimulation of biological systems |
| US11577077B2 (en) | 2006-10-09 | 2023-02-14 | Endostim, Inc. | Systems and methods for electrical stimulation of biological systems |
| US20150224310A1 (en) | 2006-10-09 | 2015-08-13 | Endostim, Inc. | Device and Implantation System for Electrical Stimulation of Biological Systems |
| US9345879B2 (en) | 2006-10-09 | 2016-05-24 | Endostim, Inc. | Device and implantation system for electrical stimulation of biological systems |
| US9433750B2 (en) * | 2009-06-16 | 2016-09-06 | The Board Of Trustees Of The Leland Stanford Junior University | Method of making and using an apparatus for a locomotive micro-implant using active electromagnetic propulsion |
| US11717681B2 (en) | 2010-03-05 | 2023-08-08 | Endostim, Inc. | Systems and methods for treating gastroesophageal reflux disease |
| US8447404B2 (en) | 2010-03-05 | 2013-05-21 | Endostim, Inc. | Device and implantation system for electrical stimulation of biological systems |
| EP3308830A1 (en) | 2011-04-14 | 2018-04-18 | Endostim, Inc. | Systems and methods for treating gastroesophageal reflux disease |
| US9925367B2 (en) | 2011-09-02 | 2018-03-27 | Endostim, Inc. | Laparoscopic lead implantation method |
| WO2013067538A1 (en) | 2011-11-04 | 2013-05-10 | Nevro Corporation | Medical device communication and charding assemblies for use with implantable signal generators |
| JP5945149B2 (ja) * | 2012-04-18 | 2016-07-05 | アズビル株式会社 | フィールド機器 |
| JP6426085B2 (ja) | 2012-06-15 | 2018-11-21 | ケース ウェスタン リザーブ ユニバーシティCase Western Reserve University | 損傷のない神経組織伝導ブロック用の治療送達装置および方法 |
| US10195434B2 (en) | 2012-06-15 | 2019-02-05 | Case Western Reserve University | Treatment of pain using electrical nerve conduction block |
| CN104736197A (zh) | 2012-08-23 | 2015-06-24 | 恩多斯提姆公司 | 用于生物系统的电刺激的装置和植入系统 |
| US8805505B1 (en) * | 2013-01-25 | 2014-08-12 | Medtronic, Inc. | Using telemetry downlink for real time clock calibration |
| US9498619B2 (en) * | 2013-02-26 | 2016-11-22 | Endostim, Inc. | Implantable electrical stimulation leads |
| US9238144B2 (en) * | 2013-03-14 | 2016-01-19 | Neuropace, Inc. | Optimizing data retrieval from an active implantable medical device |
| WO2016123563A1 (en) * | 2015-01-30 | 2016-08-04 | Advastim, Inc. | Neurostimulator system and simulation lead |
| WO2014179685A1 (en) | 2013-05-03 | 2014-11-06 | Nevro Corporation | Molded headers for implantable signal generators, and associated systems and methods |
| US20150238764A1 (en) | 2013-05-10 | 2015-08-27 | Case Western Reserve University | Systems and methods for preventing noise in an electric waveform for neural stimulation, block, or sensing |
| US20150048839A1 (en) * | 2013-08-13 | 2015-02-19 | Broadcom Corporation | Battery fuel gauge calibration |
| US9232485B2 (en) * | 2013-08-23 | 2016-01-05 | Pacesetter, Inc. | System and method for selectively communicating with an implantable medical device |
| CN105848708A (zh) | 2013-09-03 | 2016-08-10 | 恩多斯蒂姆股份有限公司 | 电刺激疗法中的电极极性切换的方法和系统 |
| US9270137B2 (en) * | 2014-02-07 | 2016-02-23 | Advanced Neuromodulation Systems, Inc. | System and method for controlling charging energy delivered to an implantable medical device |
| US9647886B2 (en) * | 2014-02-17 | 2017-05-09 | Haier Us Appliance Solutions, Inc. | Update appliance communication settings to compensate for temperature fluctuations |
| KR102216484B1 (ko) * | 2014-02-18 | 2021-02-17 | 삼성전자주식회사 | 충전 제어 방법 및 그 장치 |
| EP3145582B1 (en) | 2014-05-20 | 2020-10-21 | Nevro Corporation | Implanted pulse generators with reduced power consumption via signal strength/duration characteristics, and associated systems |
| CN106714666A (zh) * | 2014-07-01 | 2017-05-24 | 注射感知股份有限公司 | 用于患者监测的具有无线接口的超低功率充电植入式传感器 |
| US9884198B2 (en) * | 2014-10-22 | 2018-02-06 | Nevro Corp. | Systems and methods for extending the life of an implanted pulse generator battery |
| EP3220999A2 (en) | 2014-11-17 | 2017-09-27 | Endostim, Inc. | Implantable electro-medical device programmable for improved operational life |
| US9748782B1 (en) * | 2015-01-12 | 2017-08-29 | Google Inc. | Power adapter charging modification based on a feedback loop |
| US9113912B1 (en) | 2015-01-21 | 2015-08-25 | Serene Medical, Inc. | Systems and devices to identify and limit nerve conduction |
| KR20180006365A (ko) * | 2015-01-21 | 2018-01-17 | 서린 메디컬 인코포레이티드 | 신경전도 확인 및 제한을 위한 시스템 및 디바이스 |
| US9517344B1 (en) | 2015-03-13 | 2016-12-13 | Nevro Corporation | Systems and methods for selecting low-power, effective signal delivery parameters for an implanted pulse generator |
| EP3636203B1 (de) * | 2015-03-27 | 2022-05-04 | W & H Dentalwerk Bürmoos GmbH | Medizinisches oder dentales instrumententeil, behandlungsvorrichtung und verfahren zum betrieb |
| US9839786B2 (en) | 2015-04-17 | 2017-12-12 | Inspire Medical Systems, Inc. | System and method of monitoring for and reporting on patient-made stimulation therapy programming changes |
| US10159847B2 (en) | 2015-05-20 | 2018-12-25 | Medtronic, Inc. | Implantable medical devices with active component monitoring |
| CN204915554U (zh) * | 2015-09-18 | 2015-12-30 | 泰科电子(上海)有限公司 | 感应电路、混合驱动电路及感应器组件 |
| JP6574668B2 (ja) | 2015-10-05 | 2019-09-11 | 株式会社東芝 | インピーダンス測定回路 |
| WO2017062272A1 (en) | 2015-10-06 | 2017-04-13 | Case Western Reserve University | High-charge capacity electrodes to deliver direct current nerve conduction block |
| US10864373B2 (en) | 2015-12-15 | 2020-12-15 | Case Western Reserve University | Systems for treatment of a neurological disorder using electrical nerve conduction block |
| US10420935B2 (en) | 2015-12-31 | 2019-09-24 | Nevro Corp. | Controller for nerve stimulation circuit and associated systems and methods |
| WO2017139243A1 (en) | 2016-02-08 | 2017-08-17 | Halo Neuro, Inc. | Method and system for improving provision of electrical stimulation |
| AU2017249786B2 (en) * | 2016-04-14 | 2022-05-26 | Neurolief Ltd. | Method and device for transdermally applying electrical stimulation to a region of the head having high impedance |
| AT518762B1 (de) * | 2016-05-27 | 2021-06-15 | Leonh Lang | Prüfvorrichtung |
| US10569079B2 (en) | 2016-08-17 | 2020-02-25 | Envoy Medical Corporation | Communication system and methods for fully implantable modular cochlear implant system |
| ES2910203T3 (es) | 2016-08-26 | 2022-05-11 | Univ California | Tratamiento de disfunción cardiaca |
| WO2019157103A1 (en) | 2016-11-17 | 2019-08-15 | Endostim, Inc. | Electrical stimulation system for the treatment of gastrointestinal disorders |
| US11819683B2 (en) | 2016-11-17 | 2023-11-21 | Endostim, Inc. | Modular stimulation system for the treatment of gastrointestinal disorders |
| EP3606599A4 (en) | 2017-04-03 | 2021-01-13 | Presidio Medical, Inc. | SYSTEMS AND PROCEDURES FOR A DC NERVOUS GUIDE BLOCK |
| US12053626B2 (en) | 2017-04-06 | 2024-08-06 | Endostim, Inc. | Surface electrodes |
| WO2018208992A1 (en) * | 2017-05-09 | 2018-11-15 | Nalu Medical, Inc. | Stimulation apparatus |
| TWI643043B (zh) * | 2017-06-16 | 2018-12-01 | 東元電機股份有限公司 | 控制命令產生方法及其裝置 |
| JP7245233B2 (ja) | 2017-09-14 | 2023-03-23 | リヴァノヴァ ユーエスエイ インコーポレイテッド | 植え込み型神経刺激装置のためのカスタマイズ可能な漸増 |
| IL255585B (en) * | 2017-11-09 | 2021-01-31 | Zak Alexander | Battery-powered current regulator for pulsed loads |
| AU2019214966B2 (en) | 2018-01-30 | 2024-12-05 | Nevro Corp. | Efficient use of an implantable pulse generator battery, and associated systems and methods |
| CN118557272A (zh) | 2018-02-09 | 2024-08-30 | 普雷西迪奥医学有限公司 | 用于心脏传导阻滞的系统和方法 |
| ES2947433T3 (es) * | 2018-02-20 | 2023-08-09 | Presidio Medical Inc | Sistemas para bloqueo de conducción nerviosa |
| GB2572439A (en) * | 2018-03-29 | 2019-10-02 | Bio Medical Res Limited | Electrode contact monitoring |
| CN111954966B (zh) * | 2018-04-10 | 2025-09-30 | 坦德姆糖尿病护理股份有限公司 | 用于对医疗设备进行感应充电的系统和方法 |
| EP3586915A1 (de) * | 2018-06-25 | 2020-01-01 | BIOTRONIK SE & Co. KG | Vorrichtung zur aktivierung von zellstrukturen mittels elektromagnetischer energie |
| US11752329B2 (en) | 2018-07-01 | 2023-09-12 | Presidio Medical, Inc. | Systems and methods for nerve conduction block |
| EP3603737B1 (en) | 2018-07-31 | 2020-08-26 | Flow Neuroscience AB | Positioning of electrodes for transcranial brain stimulation |
| US11566885B2 (en) * | 2018-10-31 | 2023-01-31 | Biotronik Se & Co. Kg | Method for relative lead offset determination |
| WO2020128748A1 (en) * | 2018-12-20 | 2020-06-25 | Galvani Bioelectronics Limited | Nerve stimulation system |
| US10933238B2 (en) | 2019-01-31 | 2021-03-02 | Nevro Corp. | Power control circuit for sterilized devices, and associated systems and methods |
| CN120037589A (zh) | 2019-02-21 | 2025-05-27 | 恩沃伊医疗公司 | 具有集成组件和引线表征的可植入耳蜗系统 |
| US11992282B2 (en) | 2019-03-15 | 2024-05-28 | Cilag Gmbh International | Motion capture controls for robotic surgery |
| US11666401B2 (en) | 2019-03-15 | 2023-06-06 | Cilag Gmbh International | Input controls for robotic surgery |
| US11701190B2 (en) | 2019-03-15 | 2023-07-18 | Cilag Gmbh International | Selectable variable response of shaft motion of surgical robotic systems |
| US11690690B2 (en) * | 2019-03-15 | 2023-07-04 | Cilag Gmbh International | Segmented control inputs for surgical robotic systems |
| EP3956017A4 (en) * | 2019-04-18 | 2023-10-04 | ReShape Lifesciences, Inc. | METHOD AND SYSTEMS FOR NEURONAL REGULATION |
| US11944833B2 (en) * | 2019-10-25 | 2024-04-02 | Medtronic, Inc. | User centered system for recharging implanted neurostimulator |
| US11730964B2 (en) | 2019-11-24 | 2023-08-22 | Presidio Medical, Inc. | Pulse generation and stimulation engine systems |
| US12268865B2 (en) | 2019-11-24 | 2025-04-08 | Presidio Medical, Inc. | Current bias as a control mechanism for electrode operation |
| KR20220115802A (ko) * | 2019-12-16 | 2022-08-18 | 뉴로스팀 테크놀로지스 엘엘씨 | 부스트 전하 전달 기능이 있는 비침습적 신경 액티베이터 |
| US20230310870A1 (en) * | 2020-08-14 | 2023-10-05 | Saluda Medical Pty Ltd | Rechargeable Neuromodulation Device |
| US11564046B2 (en) | 2020-08-28 | 2023-01-24 | Envoy Medical Corporation | Programming of cochlear implant accessories |
| WO2022047358A1 (en) * | 2020-08-31 | 2022-03-03 | Medtronic, Inc. | Rectifier and the timing of switching of capacitors |
| WO2022045957A1 (en) * | 2020-08-31 | 2022-03-03 | Implantica Patent Ltd | Methods and devices for secure communication with and operation of an implant |
| US11806531B2 (en) | 2020-12-02 | 2023-11-07 | Envoy Medical Corporation | Implantable cochlear system with inner ear sensor |
| US11471689B2 (en) * | 2020-12-02 | 2022-10-18 | Envoy Medical Corporation | Cochlear implant stimulation calibration |
| US11697019B2 (en) | 2020-12-02 | 2023-07-11 | Envoy Medical Corporation | Combination hearing aid and cochlear implant system |
| US11813746B2 (en) | 2020-12-30 | 2023-11-14 | Cilag Gmbh International | Dual driving pinion crosscheck |
| US12059170B2 (en) | 2020-12-30 | 2024-08-13 | Cilag Gmbh International | Surgical tool with tool-based translation and lock for the same |
| US12070287B2 (en) | 2020-12-30 | 2024-08-27 | Cilag Gmbh International | Robotic surgical tools having dual articulation drives |
| US12239404B2 (en) | 2020-12-30 | 2025-03-04 | Cilag Gmbh International | Torque-based transition between operating gears |
| US11633591B2 (en) | 2021-02-23 | 2023-04-25 | Envoy Medical Corporation | Combination implant system with removable earplug sensor and implanted battery |
| US11839765B2 (en) | 2021-02-23 | 2023-12-12 | Envoy Medical Corporation | Cochlear implant system with integrated signal analysis functionality |
| US12081061B2 (en) | 2021-02-23 | 2024-09-03 | Envoy Medical Corporation | Predicting a cumulative thermal dose in implantable battery recharge systems and methods |
| WO2022187465A1 (en) | 2021-03-04 | 2022-09-09 | Envoy Medical Corporation | Cochlear implant system with improved input signal-to-noise ratio |
| US11865339B2 (en) | 2021-04-05 | 2024-01-09 | Envoy Medical Corporation | Cochlear implant system with electrode impedance diagnostics |
| WO2022214196A1 (en) * | 2021-04-09 | 2022-10-13 | Azyro Sa | Medical device and method for operating a medical device |
| EP4324511B1 (en) * | 2021-04-16 | 2025-12-17 | Beijing Leading Innovation Medical Valley Co., Ltd | Implantable nerve stimulator system |
| CN112972895A (zh) * | 2021-04-16 | 2021-06-18 | 北京领创医谷科技发展有限责任公司 | 植入式神经刺激器 |
| CN113274640A (zh) * | 2021-04-16 | 2021-08-20 | 北京领创医谷科技发展有限责任公司 | 植入式神经刺激器系统 |
| CN114225218A (zh) * | 2021-11-17 | 2022-03-25 | 佛山职业技术学院 | 一种植入式心脏起搏器的无线能量传输控制系统 |
| WO2023091848A1 (en) * | 2021-11-22 | 2023-05-25 | Nxstage Medical, Inc. | Grounding assurance and voltage-to-patient detection for patient safety |
| US11735031B2 (en) * | 2021-12-30 | 2023-08-22 | Canon U.S.A., Inc. | Medical apparatus, method, and storage medium to detect impact |
| US12589240B2 (en) * | 2022-03-11 | 2026-03-31 | AxioBionics LLC | Muscle stimulation system |
| US20230364413A1 (en) * | 2022-05-13 | 2023-11-16 | Electrocore, Inc. | Systems and methods for optimizing nerve stimulation |
| US12137904B2 (en) | 2022-06-15 | 2024-11-12 | Cilag Gmbh International | Impact mechanism for grasp clamp fire |
| EP4701725A1 (en) * | 2023-04-28 | 2026-03-04 | Medtronic, Inc. | Isolation breach detection |
Family Cites Families (78)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3727616A (en) | 1971-06-15 | 1973-04-17 | Gen Dynamics Corp | Electronic system for the stimulation of biological systems |
| US4308466A (en) * | 1979-06-07 | 1981-12-29 | Northrop Corporation | Circuit to compensate for semiconductor switching speed variations |
| US4612934A (en) | 1981-06-30 | 1986-09-23 | Borkan William N | Non-invasive multiprogrammable tissue stimulator |
| US4793353A (en) | 1981-06-30 | 1988-12-27 | Borkan William N | Non-invasive multiprogrammable tissue stimulator and method |
| US4498478A (en) | 1982-09-13 | 1985-02-12 | Medtronic, Inc. | Apparatus for reducing polarization potentials in a pacemaker |
| US4592359A (en) | 1985-04-02 | 1986-06-03 | The Board Of Trustees Of The Leland Stanford Junior University | Multi-channel implantable neural stimulator |
| US4979511A (en) | 1989-11-03 | 1990-12-25 | Cyberonics, Inc. | Strain relief tether for implantable electrode |
| US5263480A (en) | 1991-02-01 | 1993-11-23 | Cyberonics, Inc. | Treatment of eating disorders by nerve stimulation |
| DE4104359A1 (de) | 1991-02-13 | 1992-08-20 | Implex Gmbh | Ladesystem fuer implantierbare hoerhilfen und tinnitus-maskierer |
| US5251634A (en) | 1991-05-03 | 1993-10-12 | Cyberonics, Inc. | Helical nerve electrode |
| US5215089A (en) | 1991-10-21 | 1993-06-01 | Cyberonics, Inc. | Electrode assembly for nerve stimulation |
| US5531778A (en) | 1994-09-20 | 1996-07-02 | Cyberonics, Inc. | Circumneural electrode assembly |
| US5702431A (en) | 1995-06-07 | 1997-12-30 | Sulzer Intermedics Inc. | Enhanced transcutaneous recharging system for battery powered implantable medical device |
| WO1997022313A1 (en) | 1995-12-19 | 1997-06-26 | Cochlear Limited | Cochlear implant system with soft turn on electrodes |
| US6101413A (en) * | 1996-06-04 | 2000-08-08 | Survivalink Corporation | Circuit detectable pediatric defibrillation electrodes |
| US5733313A (en) | 1996-08-01 | 1998-03-31 | Exonix Corporation | RF coupled, implantable medical device with rechargeable back-up power source |
| US5733310A (en) * | 1996-12-18 | 1998-03-31 | Zmd Corporation | Electrotherapy circuit and method for producing therapeutic discharge waveform immediately following sensing pulse |
| US5873893A (en) * | 1997-03-05 | 1999-02-23 | Physio-Control Corporation | Method and apparatus for verifying the integrity of an output circuit before and during application of a defibrillation pulse |
| US6175765B1 (en) | 1997-03-05 | 2001-01-16 | Medtronic Physio-Control Manufacturing Corp. | H-bridge circuit for generating a high-energy biphasic waveform in an external defibrillator |
| US6148233A (en) * | 1997-03-07 | 2000-11-14 | Cardiac Science, Inc. | Defibrillation system having segmented electrodes |
| US6185458B1 (en) | 1999-04-30 | 2001-02-06 | Agilent Technologies, Inc. | Reduced energy self test operation in a defibrillator |
| US6516227B1 (en) | 1999-07-27 | 2003-02-04 | Advanced Bionics Corporation | Rechargeable spinal cord stimulator system |
| US7167756B1 (en) * | 2000-04-28 | 2007-01-23 | Medtronic, Inc. | Battery recharge management for an implantable medical device |
| US7702394B2 (en) | 2001-05-01 | 2010-04-20 | Intrapace, Inc. | Responsive gastric stimulator |
| GB2392026B (en) | 2001-05-14 | 2005-09-21 | Invensys Energy Systems | Stress management of battery recharge, and method of state of charge estimation |
| US20060116736A1 (en) | 2001-07-23 | 2006-06-01 | Dilorenzo Daniel J | Method, apparatus, and surgical technique for autonomic neuromodulation for the treatment of obesity |
| US20090187230A1 (en) | 2001-07-23 | 2009-07-23 | Dilorenzo Daniel J | Method and apparatus for programming of autonomic neuromodulation for the treatment of obesity |
| US6600956B2 (en) | 2001-08-21 | 2003-07-29 | Cyberonics, Inc. | Circumneural electrode assembly |
| US7295872B2 (en) | 2001-10-10 | 2007-11-13 | Massachusetts Institute Of Technology | System for and method of power efficient electrical tissue stimulation |
| US7317948B1 (en) | 2002-02-12 | 2008-01-08 | Boston Scientific Scimed, Inc. | Neural stimulation system providing auto adjustment of stimulus output as a function of sensed impedance |
| US7089057B2 (en) | 2002-04-26 | 2006-08-08 | Medtronic, Inc. | Detection of possible failure of capacitive elements in an implantable medical device |
| US7225032B2 (en) | 2003-10-02 | 2007-05-29 | Medtronic Inc. | External power source, charger and system for an implantable medical device having thermal characteristics and method therefore |
| US20050075696A1 (en) * | 2003-10-02 | 2005-04-07 | Medtronic, Inc. | Inductively rechargeable external energy source, charger, system and method for a transcutaneous inductive charger for an implantable medical device |
| WO2005067792A1 (en) * | 2004-01-12 | 2005-07-28 | Calypso Medical Technologies, Inc. | Methods and apparatus for stimulating and/or sensing neurons in a patient |
| US7386342B1 (en) * | 2004-09-08 | 2008-06-10 | Pacesetter, Inc. | Subcutaneous cardiac stimulation device providing anti-tachycardia pacing therapy and method |
| US8214047B2 (en) | 2004-09-27 | 2012-07-03 | Advanced Neuromodulation Systems, Inc. | Method of using spinal cord stimulation to treat gastrointestinal and/or eating disorders or conditions |
| US8239029B2 (en) | 2004-10-21 | 2012-08-07 | Advanced Neuromodulation Systems, Inc. | Stimulation of the amygdalohippocampal complex to treat neurological conditions |
| US8260426B2 (en) | 2008-01-25 | 2012-09-04 | Cyberonics, Inc. | Method, apparatus and system for bipolar charge utilization during stimulation by an implantable medical device |
| WO2006087712A2 (en) | 2005-02-17 | 2006-08-24 | Metacure N.V. | Charger with data transfer capabilities |
| US7561923B2 (en) | 2005-05-09 | 2009-07-14 | Cardiac Pacemakers, Inc. | Method and apparatus for controlling autonomic balance using neural stimulation |
| US7200504B1 (en) | 2005-05-16 | 2007-04-03 | Advanced Bionics Corporation | Measuring temperature change in an electronic biomedical implant |
| US20070016262A1 (en) | 2005-07-13 | 2007-01-18 | Betastim, Ltd. | Gi and pancreatic device for treating obesity and diabetes |
| US7567840B2 (en) | 2005-10-28 | 2009-07-28 | Cyberonics, Inc. | Lead condition assessment for an implantable medical device |
| US8041428B2 (en) | 2006-02-10 | 2011-10-18 | Electrocore Llc | Electrical stimulation treatment of hypotension |
| US7769455B2 (en) * | 2006-01-27 | 2010-08-03 | Cyberonics, Inc. | Power supply monitoring for an implantable device |
| EP1981584B1 (en) | 2006-02-03 | 2015-05-13 | Interventional Autonomics Corporation | Intravascular device for neuromodulation |
| EP1984064A4 (en) | 2006-02-10 | 2009-11-11 | Electrocore Inc | METHODS AND APPARATUS USED TO TREAT ANAPHYLAXIS USING ELECTRICAL MODULATION |
| US8187297B2 (en) | 2006-04-19 | 2012-05-29 | Vibsynt, Inc. | Devices and methods for treatment of obesity |
| WO2007137026A2 (en) | 2006-05-18 | 2007-11-29 | Cedars-Sinai Medical Center | Electrical stimulation of the lower esophageal sphincter |
| EP2095485A2 (en) | 2006-12-11 | 2009-09-02 | Techtium Ltd. | Charging methods for battery powered devices |
| US7734353B2 (en) * | 2007-04-19 | 2010-06-08 | Medtronic Inc. | Controlling temperature during recharge for treatment of infection or other conditions |
| JP4542570B2 (ja) | 2007-06-27 | 2010-09-15 | レノボ・シンガポール・プライベート・リミテッド | 充電システム、電子機器および充電方法 |
| CN100578889C (zh) * | 2007-07-25 | 2010-01-06 | 中兴通讯股份有限公司 | 为便携式手持设备的电池充电的方法 |
| US7717903B2 (en) | 2007-09-06 | 2010-05-18 | M2 Group Holdings, Inc. | Operating an infusion pump system |
| JP4660523B2 (ja) | 2007-09-19 | 2011-03-30 | レノボ・シンガポール・プライベート・リミテッド | 電池セルの表面温度で充電制御する充電システム |
| KR20100122934A (ko) | 2008-02-22 | 2010-11-23 | 액세스 비지니스 그룹 인터내셔날 엘엘씨 | 배터리 유형 탐지가 가능한 유도 전력 공급 시스템 |
| JP2011527621A (ja) | 2008-07-11 | 2011-11-04 | ボストン サイエンティフィック ニューロモデュレイション コーポレイション | プログラム可能な熱限界を設定するための医療システム及び方法 |
| DE102008058737B4 (de) | 2008-09-08 | 2019-12-12 | Erbe Elektromedizin Gmbh | HF-Chirurgiegenerator |
| WO2010135634A2 (en) | 2009-05-22 | 2010-11-25 | Arizona Board Of Regents For And On Behalf Of Arizona State University | Systems, and methods for neurostimulation and neurotelemetry using semiconductor diode systems |
| DE202010017584U1 (de) | 2009-05-08 | 2012-02-29 | Université Libre de Bruxelles | Gastrointestinale Vorrichtung |
| US8214042B2 (en) | 2009-05-26 | 2012-07-03 | Boston Scientific Neuromodulation Corporation | Techniques for controlling charging of batteries in an external charger and an implantable medical device |
| US8452399B2 (en) * | 2009-06-23 | 2013-05-28 | Medtronic, Inc. | Constant current pacing apparatus with protection from high voltage pulses |
| US8744592B2 (en) | 2009-10-08 | 2014-06-03 | Boston Scientific Neuromodulation Corporation | Efficient external charger for an implantable medical device optimized for fast charging and constrained by an implant power dissipation limit |
| CN102577009A (zh) | 2009-10-27 | 2012-07-11 | 惠普发展公司,有限责任合伙企业 | 可再充电电池的电池控制充电 |
| EP3305363A1 (en) | 2010-05-27 | 2018-04-11 | Ndi Medical, LLC | Waveform shapes for treating neurological disorders optimized for energy efficiency |
| US8620450B2 (en) | 2010-07-19 | 2013-12-31 | Cardiac Pacemakers, Inc. | Minimally invasive lead system for vagus nerve stimulation |
| US8324864B2 (en) | 2010-08-17 | 2012-12-04 | GM Global Technology Operations LLC | Battery fast charging current control algorithm |
| WO2012044472A2 (en) | 2010-10-01 | 2012-04-05 | Indiana University Research & Technology Corporation | Long term vagal nerve stimulation for therapeutic and diagnostic treatment |
| JP5964841B2 (ja) | 2010-10-22 | 2016-08-03 | ニュークリアス サイエンティフィック, インコーポレイテッド | バッテリを急速充電するための装置および方法 |
| US9474482B2 (en) | 2010-11-01 | 2016-10-25 | G-Tech Medical, Inc. | Method for diagnosis and treatment of disorders of the gastrointestinal tract, and apparatus for use therewith |
| WO2012061608A2 (en) | 2010-11-03 | 2012-05-10 | The Cleveland Clinic Foundation | Apparatus for energy efficient stimulation |
| US8696616B2 (en) | 2010-12-29 | 2014-04-15 | Ethicon Endo-Surgery, Inc. | Obesity therapy and heart rate variability |
| US9174060B2 (en) * | 2011-01-21 | 2015-11-03 | Neurocardiac Innovations, Llc | Implantable cardiac devices and methods |
| CN102651565B (zh) | 2011-02-25 | 2015-05-13 | 凹凸电子(武汉)有限公司 | 电池组充电管理方法和装置、充电器和电池组管理系统 |
| US8594804B2 (en) | 2011-04-28 | 2013-11-26 | Cyberonics, Inc. | Implantable medical device charging |
| US9393433B2 (en) | 2011-07-20 | 2016-07-19 | Boston Scientific Neuromodulation Corporation | Battery management for an implantable medical device |
| US9270134B2 (en) * | 2012-01-27 | 2016-02-23 | Medtronic, Inc. | Adaptive rate recharging system |
| CN203458691U (zh) | 2013-08-15 | 2014-03-05 | 先健科技(深圳)有限公司 | 植入式神经电刺激系统 |
-
2013
- 2013-03-11 JP JP2014561181A patent/JP6190828B2/ja not_active Expired - Fee Related
- 2013-03-11 AU AU2013202807A patent/AU2013202807B2/en not_active Ceased
- 2013-03-11 WO PCT/US2013/030188 patent/WO2013134763A2/en not_active Ceased
- 2013-03-11 EP EP13711535.8A patent/EP2822649B1/en not_active Not-in-force
- 2013-03-11 US US13/793,715 patent/US9393420B2/en not_active Expired - Fee Related
- 2013-03-11 CN CN201610950304.3A patent/CN107029349A/zh active Pending
- 2013-03-11 EP EP16173070.0A patent/EP3115080A1/en not_active Withdrawn
- 2013-03-11 CN CN201380023723.7A patent/CN104394930B/zh not_active Expired - Fee Related
-
2016
- 2016-06-27 US US15/194,143 patent/US20160303378A1/en not_active Abandoned
- 2016-08-15 AU AU2016216519A patent/AU2016216519A1/en not_active Abandoned
-
2017
- 2017-02-28 JP JP2017036156A patent/JP2017087074A/ja not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| CN107029349A (zh) | 2017-08-11 |
| AU2013202807A1 (en) | 2013-09-26 |
| US20160303378A1 (en) | 2016-10-20 |
| AU2013202807B2 (en) | 2016-05-12 |
| CN104394930A (zh) | 2015-03-04 |
| US9393420B2 (en) | 2016-07-19 |
| CN104394930B (zh) | 2016-11-09 |
| WO2013134763A9 (en) | 2014-02-27 |
| US20130238048A1 (en) | 2013-09-12 |
| WO2013134763A2 (en) | 2013-09-12 |
| AU2016216519A1 (en) | 2016-09-01 |
| JP2015509442A (ja) | 2015-03-30 |
| EP3115080A1 (en) | 2017-01-11 |
| WO2013134763A3 (en) | 2014-04-17 |
| EP2822649B1 (en) | 2016-10-05 |
| EP2822649A2 (en) | 2015-01-14 |
| JP2017087074A (ja) | 2017-05-25 |
| WO2013134763A8 (en) | 2013-12-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6190828B2 (ja) | 医療用デバイスにおける使用のための安全特徴 | |
| AU2008259917B2 (en) | Implantable therapy system | |
| US11517752B2 (en) | Trial stimulation systems | |
| JP5224478B2 (ja) | 患者の活動を計測する神経刺激システム | |
| US9826963B2 (en) | Minimally invasive implantable neurostimulation system | |
| US20120197356A1 (en) | Waveforms for Remote Electrical Stimulation Therapy | |
| US20260007894A1 (en) | Electric stimulation system | |
| CN115430048A (zh) | 基于患者步行速度的刺激编程和控制 | |
| US20220271575A1 (en) | Learning algorithm for recharge system | |
| US20220212017A1 (en) | Temperature sensors in medical implants | |
| AU2014201907B2 (en) | Implantable therapy system | |
| EP3122417A1 (en) | Responsive neurostimulation for the treatment of chronic cardiac dysfunction | |
| HK1143959B (en) | Implantable therapy system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141111 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160216 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161125 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161129 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170228 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170714 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170807 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6190828 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |