JP6229882B2 - 車々間通信装置 - Google Patents
車々間通信装置 Download PDFInfo
- Publication number
- JP6229882B2 JP6229882B2 JP2013236998A JP2013236998A JP6229882B2 JP 6229882 B2 JP6229882 B2 JP 6229882B2 JP 2013236998 A JP2013236998 A JP 2013236998A JP 2013236998 A JP2013236998 A JP 2013236998A JP 6229882 B2 JP6229882 B2 JP 6229882B2
- Authority
- JP
- Japan
- Prior art keywords
- intersection
- vehicle
- inter
- vehicle communication
- communication
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Landscapes
- Traffic Control Systems (AREA)
Description
このように、交差点ごとに、予め受信電力の空間分布特性をマッピングしておけば、自車両前方の交差点の受信電力の空間分布特性を容易に取得することができる。
これにより、例えば交差点の手間で一時停止している自車両において、運転支援システムの自動ブレーキだけが警告なしで作動して、自車両が発進しない場合であっても、ドライバは、事前にかかる事態が発生する可能性がある旨の情報を提供されているため、運転支援システムの信頼性及び受容性の低下の防止が図られる。
まず、図1のブロック図を参照して、本実施形態の車々間通信装置の構成について説明する。なお、図1のブロック図では、車々間通信の基本的な機能のブロックの図示を省略している。
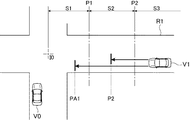
なお、第2最低距離L2は、第1の最低距離L1より長く設定される。したがって、第2限界地点P2は、第1限界地点P1よりも、交差点から離れた位置に設定される。

なお、ドライバに対する事前の情報提供は、スピーカにより音声で行ってもよいし、ディスプレイによる表示で行ってもよい。
まず、交差点特定部2が、地図情報に基づいて自車両前方の交差点I0を特定する(S1)。
4 限界地点データベース
6 限界地点取得部
8 分布特性データベース
10 分布特性推定部
12 所要時間推定部
14 到達地点推定部
16 事前提供部
Claims (4)
- 地図情報に基づいて自車両前方の交差点を特定する交差点特定手段と、
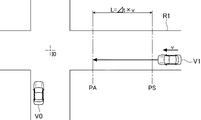
自車両の運転支援システムにより自動ブレーキを作動させるために、車々間通信により検出される交差道路上の他車両が交差点から最低限離れている必要がある距離として設定した第1の最低距離だけ前記交差点から離れた前記交差道路上の第1限界地点を、交差点ごとに対応づけて格納した限界地点データベースと、
前記限界距離データベースから、特定された前記自車両前方の交差点における第1限界地点を取得する限界地点取得手段と、
前記自車両前方の交差点の周辺の受信電力の空間分布特性を推定する分布特性推定手段と、
推定した受信電力の空間分布特性に基づいて、前記自車両前方の交差点付近の車々間通信の通信エリアに進入した他車両との車々間通信に要する推定所要時間を推定する所要時間推定手段と、
前記推定所要時間に基づいて、車々間通信の通信完了時の交差道路上の他車両の推定到達地点を推定する到達地点推定手段と、
前記推定到達地点が前記第1限界地点よりも交差点に近い区間内にある場合に、前記自動ブレーキが作動されない旨の情報を、ドライバに事前に提供する事前提供手段と、を備えることを特徴とする車々間通信装置。 - 交差点周辺の受信電力の空間分布特性を交差点ごとに対応づけて格納した分布特性データベースを更に備え、
前記分布特性推定手段は、前記分布特性データベースから、前記自車両前方の交差点の周辺の受信電力の空間分布特性を取得することにより、前記自車両前方の交差点の周辺の受信電力の空間分布特性を推定する、
ことを特徴とする請求項1記載の車々間通信装置。 - 前記限界地点データベースは、運転支援システムにより自車前方の交差点の交差道路上の他車両の接近を報知する警告を発するために、車々間通信により検出される交差道路上の他車両が交差点から最低限離れている必要がある距離として設定した第2の最低距離だけ交差点から離れた前記交差道路上の第2限界地点を、交差点ごとに対応づけて格納し、
前記第2の最低距離は、前記第1の最低距離より長く設定され、
前記事前提供手段は、前記推定到達地点が、前記第1限界地点と前記第2限界値との間の区間内にある場合に、前記警告をせずに、前記自動ブレーキが作動される可能性がある旨の情報を、ドライバに事前に提供する、
ことを特徴とする請求項1又は2に記載の車々間通信装置。 - 前記事前提供手段は、自車両が交差点の手前で一時停止しているときに、情報を提供する、
ことを特徴とする請求項1〜3の何れか一項に記載の車々間通信装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013236998A JP6229882B2 (ja) | 2013-11-15 | 2013-11-15 | 車々間通信装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013236998A JP6229882B2 (ja) | 2013-11-15 | 2013-11-15 | 車々間通信装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015097028A JP2015097028A (ja) | 2015-05-21 |
| JP6229882B2 true JP6229882B2 (ja) | 2017-11-15 |
Family
ID=53374292
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013236998A Active JP6229882B2 (ja) | 2013-11-15 | 2013-11-15 | 車々間通信装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6229882B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6358616B2 (ja) * | 2014-07-16 | 2018-07-18 | マツダ株式会社 | アンテナ性能評価装置及び到来波角度プロファイル推定装置 |
| JP6493422B2 (ja) | 2016-02-10 | 2019-04-03 | 株式会社デンソー | 走行支援装置 |
| JP2022123259A (ja) | 2021-02-12 | 2022-08-24 | トヨタ自動車株式会社 | 衝突回避支援システム及び衝突回避支援装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4483589B2 (ja) * | 2005-01-12 | 2010-06-16 | 日産自動車株式会社 | 車両用情報提供装置 |
| JP4306675B2 (ja) * | 2005-12-15 | 2009-08-05 | トヨタ自動車株式会社 | 車両用運転支援装置及び車両用制御装置 |
| JP4602277B2 (ja) * | 2006-03-28 | 2010-12-22 | 本田技研工業株式会社 | 衝突判定装置 |
| JP2010152554A (ja) * | 2008-12-24 | 2010-07-08 | Aisin Aw Co Ltd | 車載用通信装置、車載用通信方法、及び車載用通信プログラム |
| JP5614079B2 (ja) * | 2010-04-08 | 2014-10-29 | トヨタ自動車株式会社 | 運転支援装置 |
| JP5691814B2 (ja) * | 2011-05-11 | 2015-04-01 | スズキ株式会社 | 運転支援装置 |
| US8706393B2 (en) * | 2012-01-10 | 2014-04-22 | Ford Global Technologies, Llc | Intersection collision avoidance with adaptable vehicle dimensions |
-
2013
- 2013-11-15 JP JP2013236998A patent/JP6229882B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015097028A (ja) | 2015-05-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9889847B2 (en) | Method and system for driver assistance for a vehicle | |
| US10522038B2 (en) | Systems and methods for automatically warning nearby vehicles of potential hazards | |
| KR102141445B1 (ko) | 차량의 차선 변경을 위해 2개의 차량 사이의 트래픽 갭을 결정하기 위한 방법 및 제어 시스템 | |
| US9333954B2 (en) | Driver assistance system for a motor vehicle | |
| CN207496668U (zh) | 一种车辆设备和车辆系统 | |
| CN106157691A (zh) | 避免车辆间碰撞的系统 | |
| KR102111906B1 (ko) | 차량 충돌 방지 장치 및 방법 | |
| US20160167579A1 (en) | Apparatus and method for avoiding collision | |
| WO2016009600A1 (ja) | 運転支援装置 | |
| JP2007241729A (ja) | 運転支援装置及び運転支援システム | |
| JP7362733B2 (ja) | 道路環境情報の自動化クラウドソーシング | |
| CN104221068A (zh) | 驾驶辅助装置 | |
| JP5924395B2 (ja) | 周辺車両情報通知装置 | |
| JP2016197279A5 (ja) | 衝突回避装置、衝突回避システム、及び運転支援方法 | |
| CN109658716B (zh) | 信息处理装置及车辆系统 | |
| JP6229882B2 (ja) | 車々間通信装置 | |
| CN111002901A (zh) | 就潜在危险交通情形向车辆驾驶员发出警告的方法 | |
| JP5887915B2 (ja) | 車両用運転支援装置及び車両用運転支援方法 | |
| JP6443255B2 (ja) | 信号通過支援装置 | |
| CN108734998B (zh) | 驾驶辅助设备和驾驶辅助方法 | |
| JP6238016B2 (ja) | 車両用運転支援装置 | |
| JP6238018B2 (ja) | 車両用運転支援装置 | |
| KR101510994B1 (ko) | 운전 상황 판단 장치 및 방법 | |
| JP2023007198A (ja) | 退避走行支援装置および退避走行支援システム | |
| JP2017016604A (ja) | 停車禁止エリア進入警報装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160225 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161207 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170222 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170414 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170921 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171004 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6229882 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |