JP6235218B2 - 構造変形を識別するための方法および装置 - Google Patents
構造変形を識別するための方法および装置 Download PDFInfo
- Publication number
- JP6235218B2 JP6235218B2 JP2013048117A JP2013048117A JP6235218B2 JP 6235218 B2 JP6235218 B2 JP 6235218B2 JP 2013048117 A JP2013048117 A JP 2013048117A JP 2013048117 A JP2013048117 A JP 2013048117A JP 6235218 B2 JP6235218 B2 JP 6235218B2
- Authority
- JP
- Japan
- Prior art keywords
- training
- data
- heuristic model
- deformation
- cases
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N5/00—Computing arrangements using knowledge-based models
- G06N5/04—Inference or reasoning models
- G06N5/046—Forward inferencing; Production systems
- G06N5/047—Pattern matching networks; Rete networks
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B21/00—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant
- G01B21/32—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring the deformation in a solid
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M5/00—Investigating the elasticity of structures, e.g. deflection of bridges or air-craft wings
- G01M5/0041—Investigating the elasticity of structures, e.g. deflection of bridges or air-craft wings by determining deflection or stress
- G01M5/005—Investigating the elasticity of structures, e.g. deflection of bridges or air-craft wings by determining deflection or stress by means of external apparatus, e.g. test benches or portable test systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M5/00—Investigating the elasticity of structures, e.g. deflection of bridges or air-craft wings
- G01M5/0091—Investigating the elasticity of structures, e.g. deflection of bridges or air-craft wings by using electromagnetic excitation or detection
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q3/00—Arrangements for changing or varying the orientation or the shape of the directional pattern of the waves radiated from an antenna or antenna system
- H01Q3/26—Arrangements for changing or varying the orientation or the shape of the directional pattern of the waves radiated from an antenna or antenna system varying the relative phase or relative amplitude of energisation between two or more active radiating elements; varying the distribution of energy across a radiating aperture
- H01Q3/267—Phased-array testing or checking devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q3/00—Arrangements for changing or varying the orientation or the shape of the directional pattern of the waves radiated from an antenna or antenna system
- H01Q3/26—Arrangements for changing or varying the orientation or the shape of the directional pattern of the waves radiated from an antenna or antenna system varying the relative phase or relative amplitude of energisation between two or more active radiating elements; varying the distribution of energy across a radiating aperture
- H01Q3/30—Arrangements for changing or varying the orientation or the shape of the directional pattern of the waves radiated from an antenna or antenna system varying the relative phase or relative amplitude of energisation between two or more active radiating elements; varying the distribution of energy across a radiating aperture varying the relative phase between the radiating elements of an array
- H01Q3/34—Arrangements for changing or varying the orientation or the shape of the directional pattern of the waves radiated from an antenna or antenna system varying the relative phase or relative amplitude of energisation between two or more active radiating elements; varying the distribution of energy across a radiating aperture varying the relative phase between the radiating elements of an array by electrical means
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Software Systems (AREA)
- Aviation & Aerospace Engineering (AREA)
- Data Mining & Analysis (AREA)
- Computing Systems (AREA)
- General Engineering & Computer Science (AREA)
- Evolutionary Computation (AREA)
- Mathematical Physics (AREA)
- Artificial Intelligence (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Electromagnetism (AREA)
- Medical Informatics (AREA)
- Computational Linguistics (AREA)
- Details Of Aerials (AREA)
- Variable-Direction Aerials And Aerial Arrays (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
Description
102 トレーナー
104 ヒューリスティックモデル
106 変形
108 構造
110 プラットフォーム
112 形状
114 基準形状
115 制御パラメータのグループ
116 変形形状
118 出力データ
120 入力データ
121 パラメータのグループ
122 コンピュータシステム
124 推定変形データ
126 入力歪みデータ
128 歪みデータ
130 センサシステム
132 複数のセンサ
133 追加入力データ
136 複数のトレーニングケース
140 トレーニングケース
142 トレーニング変形データ
144 トレーニング歪みデータ
146 複数のアクチュエータ
148 複数のポイント
150 画像データ
152 画像化システム
154 性能パラメータのグループ
200 トレーニング環境
202 コンピュータシステム
204 サポートシステム
206 アクチュエータシステム
208 画像化システム
210 センサシステム
211 構造
212 位相アレイアンテナ
214 複数のアクチュエータ
216 複数のカメラ
300 位相アレイアンテナ
302 位相アレイアンテナ300の一部
304 複数のセンサ
306 複数のポイント
308 センサ
310 ポイント
400 表
402 ポイント識別子
404 トレーニングケース
406 トレーニングケース
408 トレーニングケース
410 トレーニングケース
412 トレーニングケース
413 推定変形測定値
500 表
502 ポイント識別子
504 トレーニングケース
506 トレーニングケース
508 トレーニングケース
510 トレーニングケース
512 トレーニングケース
513 実際の変形測定値
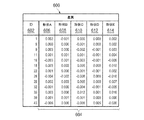
600 表
602 ポイント識別子
604 差分値
606 トレーニングケース
608 トレーニングケース
610 トレーニングケース
612 トレーニングケース
614 トレーニングケース
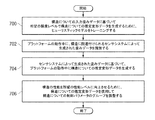
700 動作
1100 グラフ
1102 グラフ
1104 横軸
1106 縦軸
1108 横軸
1110 縦軸
1112 曲線
1114 曲線
1200 グラフ
1202 グラフ
1204 横軸
1206 縦軸
1208 横軸
1210 縦軸
1212 曲線
1214 曲線
1300 グラフ
1302 グラフ
1304 横軸
1306 縦軸
1308 横軸
1310 縦軸
1312 曲線
1314 曲線
1400 グラフ
1402 グラフ
1404 横軸
1406 縦軸
1408 横軸
1410 縦軸
1414 曲線
1414 曲線
1500 データ処理システム
1502 通信フレームワーク
1504 プロセッサユニット
1506 メモリ
1508 永続性記憶装置
1510 通信ユニット
1512 入力/出力(I/O)ユニット
1514 ディスプレイ
1516 記憶装置
1518 プログラムコード
1520 コンピュータ可読媒体
1522 コンピュータプログラム製品
1524 コンピュータ可読記憶媒体
1526 コンピュータ可読信号媒体
Claims (8)
- プラットフォーム(110)に関連付けられる構造(108)の変形を識別するための方法であって、
複数のトレーニングケース(136)内のそれぞれのトレーニングケースの前記構造(108)についてのトレーニング変形データ(142)を識別することであって、ヒューリスティックモデル(104)によって生成される出力データ(118)の精度を向上させるために、前記トレーニング変形データ(142)が前記ヒューリスティックモデル(104)によって使用されるように構成されている、トレーニング変形データ(142)を識別することと、
前記複数のトレーニングケース(136)内の前記それぞれのトレーニングケースの前記構造(108)についてのトレーニング歪みデータ(144)を識別することであって、前記ヒューリスティックモデル(104)によって生成される前記出力データ(118)の前記精度を向上させるために、前記トレーニング歪みデータ(144)が前記ヒューリスティックモデル(104)によって使用されるように構成されている、トレーニング歪みデータ(144)を識別することと、
入力歪みデータ(126)に基づいて前記構造(108)についての推定変形データ(124)を生成するために前記ヒューリスティックモデル(104)がトレーニングされるように、前記複数のトレーニングケース(136)内の前記それぞれのトレーニングケースの前記トレーニング変形データ(142)および前記トレーニング歪みデータ(144)を使用して前記ヒューリスティックモデル(104)についてのパラメータのグループ(121)を調整することと、
前記ヒューリスティックモデル(104)、前記ヒューリスティックモデル(104)についての前記入力歪みデータ(126)としての歪みデータ(128)、および前記ヒューリスティックモデル(104)についての追加入力データ(133)を使用して、前記構造(108)についての前記推定変形データ(124)を生成することと、
前記ヒューリスティックモデル(104)によって生成された前記推定変形データ(124)を使用して前記構造(108)が前記プラットフォーム(110)の動作中に所望の性能レベルを有するために必要な所望の精度レベルを前記推定変形データ(124)が有するように、前記ヒューリスティックモデル(104)によって生成された前記推定変形データ(124)を使用して前記構造(108)についての制御パラメータのグループ(115)を調整することと、
を備える、方法。 - 前記プラットフォーム(110)の動作中に、前記構造(108)に関連付けられるセンサシステム(130)を使用して前記構造(108)についての歪みデータ(128)を生成することをさらに備え、前記複数のトレーニングケース(136)内の前記それぞれのトレーニングケースの前記構造(108)についての前記トレーニング歪みデータ(144)を識別することが、
前記構造(108)に関連付けられるセンサシステム(130)を使用して前記複数のトレーニングケース(136)内の前記それぞれのトレーニングケースの前記構造(108)についての前記トレーニング歪みデータ(144)を識別することであって、前記トレーニング歪みデータ(144)が、前記ヒューリスティックモデル(104)によって生成される前記出力データ(118)の前記精度を向上させるために前記ヒューリスティックモデル(104)によって使用されるように構成されている、トレーニング歪みデータ(144)を識別することを備える、
請求項1に記載の方法。 - 前記センサシステム(130)についてのセンサの組合せを選択することをさらに備え、前記推定変形データ(124)が前記制御パラメータのグループ(115)を調整するために使用される場合、前記選択されたセンサの組合せが、前記ヒューリスティックモデル(104)が前記所望の精度レベルで前記推定変形データ(124)を生成するために、および前記構造(108)が前記プラットフォーム(110)の前記動作中に所望の性能レベルを有するために必要な最小数のセンサを有する、請求項2に記載の方法。
- 前記複数のトレーニングケース(136)内の前記それぞれのトレーニングケースの前記構造(108)についての前記トレーニング変形データ(142)を識別することが、
画像化システム(152)によって生成された画像データ(150)を使用して、前記複数のトレーニングケース(136)内の前記それぞれのトレーニングケースの前記構造(108)についての前記トレーニング変形データ(142)を識別することを備え、前記トレーニング変形データ(142)が、ニューラルネットワーク、学習ベースアルゴリズム、回帰モデル、サポートベクターマシン、データフィッティングモデル、パターン認識モデル、および人工知能のうちの少なくとも1つを備えるヒューリスティックモデル(104)によって生成される出力データ(118)の精度を向上させるために前記ヒューリスティックモデル(104)によって使用されるように構成されている、
請求項1から3のいずれか一項に記載の方法。 - 前記複数のトレーニングケース(136)内の前記それぞれのトレーニングケースの前記構造(108)についてのトレーニング環境データを識別することであって、前記トレーニング環境データが、前記ヒューリスティックモデル(104)によって生成される前記出力データ(118)の前記精度を向上させるために前記ヒューリスティックモデル(104)によって使用されるように構成されている、トレーニング環境データを識別することをさらに備え、
前記複数のトレーニングケース(136)内の前記それぞれのトレーニングケースの前記トレーニング変形データ(142)および前記トレーニング歪みデータ(144)を使用して前記ヒューリスティックモデル(104)についての前記パラメータのグループ(121)を調整することが、
前記ヒューリスティックモデル(104)が、前記入力歪みデータ(126)に基づいて前記構造(108)についての前記所望の精度レベルを有する前記推定変形データ(124)を生成するようトレーニングされるように、前記複数のトレーニングケース(136)内の前記それぞれのトレーニングケースの前記トレーニング変形データ(142)、前記トレーニング歪みデータ(144)、および前記トレーニング環境データを使用して、前記ヒューリスティックモデル(104)についての前記パラメータのグループ(121)を調整することを備える、
請求項1から4のいずれか一項に記載の方法。 - 前記構造(108)が前記複数のトレーニングケース(136)内の前記トレーニングケースに対応する変形形状(116)に変形するように、複数の選択された負荷を前記構造(108)上の複数のポイント(148)に適用することを含む、前記構造(108)を前記複数のトレーニングケース(136)内のトレーニングケースに対応する前記変形形状(116)に変形させることと、
前記構造(108)が前記変形形状(116)を有する場合、前記構造(108)についての歪みデータ(128)を生成することとをさらに備え、
前記構造(108)が、航空機に関連付けられるように構成された位相アレイアンテナ(212)であり、前記位相アレイアンテナ(212)の形状(112)が基準形状(114)から変形形状(116)に変化するように前記航空機の飛行中に前記構造(108)が変形する、請求項1に記載の方法。 - 入力歪みデータ(126)に基づいて構造(108)についての推定変形データ(124)を生成するように構成されたヒューリスティックモデル(104)と、
前記ヒューリスティックモデル(104)が、前記入力歪みデータ(126)に基づいて前記構造(108)についての前記推定変形データ(124)を生成するように、複数のトレーニングケース(136)内のそれぞれのトレーニングケースのトレーニング変形データ(142)およびトレーニング歪みデータ(144)を識別して、前記複数のトレーニングケース(136)内の前記それぞれのトレーニングケースについて識別された前記トレーニング変形データ(142)および前記トレーニング歪みデータ(144)を使用して前記ヒューリスティックモデル(104)をトレーニングするように構成されたトレーナー(102)と
を備え、
前記構造(108)が、プラットフォーム(110)に関連付けられており、
前記構造(108)についての前記推定変形データ(124)は、前記ヒューリスティックモデル(104)、前記ヒューリスティックモデル(104)についての前記入力歪みデータ(126)としての歪みデータ(128)、および前記ヒューリスティックモデル(104)についての追加入力データ(133)を使用して生成され、
前記構造(108)が前記プラットフォーム(110)の動作中に所望の性能レベルを有するために必要な所望の精度レベルを前記推定変形データ(124)が有するように、前記ヒューリスティックモデル(104)によって生成された前記推定変形データ(124)が、前記構造(108)についての制御パラメータのグループ(115)を調整するのに用いられる、装置。 - 前記トレーナー(102)が、前記構造(108)に関連付けられるセンサシステム(130)から前記複数のトレーニングケース(136)内の前記それぞれのトレーニングケースの前記トレーニング歪みデータ(144)を受信するように構成され、前記センサシステム(130)が前記構造(108)上の複数のポイント(148)に位置する複数のセンサを備え、前記複数のセンサが前記構造(108)上の前記複数のポイント(148)についての複数の歪み測定値を生成するように構成され、
前記ヒューリスティックモデル(104)が、前記入力歪みデータ(126)に基づいて前記ヒューリスティックモデル(104)によって生成される前記推定変形データ(124)が前記所望の精度レベルを有するように、前記複数のトレーニングケース(136)内の前記それぞれのトレーニングケースの前記トレーニング変形データ(142)および前記トレーニング歪みデータ(144)を使用して前記ヒューリスティックモデル(104)についてのパラメータのグループ(121)を調整するように構成され、
前記ヒューリスティックモデル(104)が、ニューラルネットワーク、学習ベースアルゴリズム、回帰モデル、サポートベクターマシン、データフィッティングモデル、パターン認識モデル、および人工知能のうちの少なくとも1つを備える、
請求項7に記載の装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/418,081 US8972310B2 (en) | 2012-03-12 | 2012-03-12 | Method for identifying structural deformation |
| US13/418,081 | 2012-03-12 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013190427A JP2013190427A (ja) | 2013-09-26 |
| JP2013190427A5 JP2013190427A5 (ja) | 2016-04-21 |
| JP6235218B2 true JP6235218B2 (ja) | 2017-11-22 |
Family
ID=47901777
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013048117A Active JP6235218B2 (ja) | 2012-03-12 | 2013-03-11 | 構造変形を識別するための方法および装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (2) | US8972310B2 (ja) |
| EP (1) | EP2648138A1 (ja) |
| JP (1) | JP6235218B2 (ja) |
| CN (2) | CN110260837A (ja) |
| AU (1) | AU2013200171B2 (ja) |
| BR (1) | BR102013005796B1 (ja) |
| CA (2) | CA2801306C (ja) |
Families Citing this family (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ITTO20120588A1 (it) * | 2012-07-04 | 2014-01-05 | Alenia Aermacchi Spa | Procedimento per la diagnostica di una struttura sottoposta a carichi e sistema per l'attuazione di detto procedimento |
| CN103640713B (zh) * | 2013-12-17 | 2015-12-30 | 中国人民解放军空军装备研究院航空装备研究所 | 飞机结构疲劳部件的监测系统 |
| CN103991556B (zh) * | 2014-04-17 | 2016-08-24 | 中国航空工业集团公司沈阳飞机设计研究所 | 一种载荷测量方法 |
| US10141656B2 (en) | 2016-01-06 | 2018-11-27 | The Boeing Company | Structural antenna array and method for making the same |
| CN105606907B (zh) * | 2016-01-20 | 2018-07-10 | 西安电子科技大学 | 一种面向智能蒙皮天线测试的变形实验装置 |
| US10184425B2 (en) * | 2016-01-28 | 2019-01-22 | The Boeing Company | Fiber optic sensing for variable area fan nozzles |
| US20170283085A1 (en) * | 2016-04-04 | 2017-10-05 | The Boeing Company | On-board structural load assessment of an aircraft during flight events |
| CN106370153B (zh) * | 2016-08-30 | 2018-11-13 | 北京理工大学 | 一种金属零件间接触形变及接触应力测量装置与方法 |
| EP3336485B1 (en) | 2016-12-15 | 2020-09-23 | Safran Landing Systems UK Limited | Aircraft assembly including deflection sensor |
| CN106932160A (zh) * | 2017-03-15 | 2017-07-07 | 上海建为历保科技股份有限公司 | 古建筑受荷分析方法 |
| US11501152B2 (en) * | 2017-05-05 | 2022-11-15 | Intel Corporation | Efficient learning and using of topologies of neural networks in machine learning |
| WO2019100265A1 (zh) * | 2017-11-22 | 2019-05-31 | 深圳市大疆创新科技有限公司 | 一种控制参数配置方法及无人机 |
| CN108716904B (zh) * | 2018-04-09 | 2020-05-05 | 水利部南京水利水文自动化研究所 | 基于有限测斜仪测点测值的坝体挠度获取方法 |
| CN108759751B (zh) * | 2018-06-09 | 2020-12-15 | 日照市睿尔泽新材料科技有限公司 | 一种胶丝宽度大小及弹性检测装置 |
| US20220042840A1 (en) * | 2018-09-17 | 2022-02-10 | Optics11 B.V. | Determining weights of vehicles in motion |
| US12373731B2 (en) | 2018-10-12 | 2025-07-29 | Massachusetts Institute Of Technology | Elastic strain engineering of materials |
| EP3864686A4 (en) | 2018-10-12 | 2022-07-27 | Massachusetts Institute of Technology | DUAL STRESS LINER FOR DEFECTIVE DOped MATERIALS |
| CN109186949B (zh) * | 2018-11-14 | 2020-05-19 | 温州锐翔装饰工程有限公司 | 检测前梳理模组和光纤器件测试设备 |
| US20220221355A1 (en) * | 2019-02-11 | 2022-07-14 | Mesomat Inc. | Sensing fibers for structural health monitoring |
| JP7432201B2 (ja) * | 2019-12-19 | 2024-02-16 | 株式会社ブリヂストン | 推定装置、推定方法、プログラム、及び学習モデル生成装置 |
| CN111152933B (zh) * | 2019-12-31 | 2021-03-16 | 洛阳安怀达智能科技有限公司 | 一种无人机舵机控制驱动系统电磁兼容设计方法 |
| US12040553B1 (en) * | 2020-02-13 | 2024-07-16 | Ast & Science, Llc | Compensating oscillations in a large-aperture phased array antenna |
| US11722211B1 (en) | 2020-02-13 | 2023-08-08 | Ast & Science, Llc | AOCS system to maintain planarity for space digital beam forming using carrier phase differential GPS, IMU and magnet torques on large space structures |
| CN112068582B (zh) * | 2020-09-24 | 2022-02-18 | 北京航空航天大学 | 一种倾转旋翼无人机过渡模式模型辨识方法 |
| JP7627912B2 (ja) * | 2020-11-05 | 2025-02-07 | 日本電信電話株式会社 | 線状構造物の挙動を算出する装置及び方法 |
| US11703457B2 (en) | 2020-12-29 | 2023-07-18 | Industrial Technology Research Institute | Structure diagnosis system and structure diagnosis method |
| CN112651454B (zh) * | 2020-12-31 | 2022-11-29 | 国网湖北省电力有限公司技术培训中心 | 一种电力设备红外数据采集系统和螺旋式数据处理方法 |
| CN112556600B (zh) * | 2021-02-22 | 2021-05-18 | 南京派光智慧感知信息技术有限公司 | 一种隧道形变实时监测方法及装置 |
| CN113701706B (zh) * | 2021-08-20 | 2023-08-04 | 南京大学(苏州)高新技术研究院 | 一种隧道变形监测光纤测试方法及系统 |
| CN114396877B (zh) * | 2021-11-19 | 2023-09-26 | 重庆邮电大学 | 面向材料力学性能的智能三维位移场及应变场测量方法 |
| KR102652367B1 (ko) * | 2021-12-13 | 2024-03-29 | (주)카이센테크 | 변형률 센서와 인공지능 회귀알고리즘을 이용한 구조물 처짐 예측 방법 |
| DE102022123305B3 (de) | 2022-09-13 | 2023-12-28 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Richtantenne mit Vermessungssystem zur automatischen Phasenlageneinstellung |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB8903091D0 (en) * | 1989-02-10 | 1989-03-30 | Secr Defence | Heuristic processor |
| DE19604772C2 (de) * | 1996-02-09 | 2002-08-29 | Siemens Ag | Verfahren zur Parametrierung einer Empfangseinrichtung, sowie entsprechende Empfangseinrichtung und Funkstation |
| US6333712B1 (en) | 1999-11-04 | 2001-12-25 | The Boeing Company | Structural deformation compensation system for large phased-array antennas |
| JP2002124817A (ja) * | 2000-10-18 | 2002-04-26 | Mitsubishi Electric Corp | フェーズドアレイアンテナ |
| JP2002168941A (ja) * | 2000-11-29 | 2002-06-14 | Mitsubishi Electric Corp | レーダ装置およびそのビーム補正方法 |
| JP3790129B2 (ja) * | 2001-06-14 | 2006-06-28 | 株式会社東芝 | プロセスシミュレータ応用制御装置及び方法 |
| US7132617B2 (en) * | 2002-02-20 | 2006-11-07 | Daimlerchrysler Corporation | Method and system for assessing quality of spot welds |
| EP1437685A3 (de) * | 2003-01-13 | 2004-07-21 | Philips Intellectual Property & Standards GmbH | Verfahren zum Segmentieren einer dreidimensionalen Struktur |
| US7218760B2 (en) * | 2003-06-30 | 2007-05-15 | Microsoft Corporation | Stereo-coupled face shape registration |
| JP2005066646A (ja) * | 2003-08-25 | 2005-03-17 | Toshiba Corp | 溶接構造物の変形、残留応力推定方法およびその推定装置 |
| US7046209B1 (en) | 2004-10-21 | 2006-05-16 | The Boeing Company | Design and fabrication methodology for a phased array antenna with shielded/integrated feed structure |
| US7109943B2 (en) | 2004-10-21 | 2006-09-19 | The Boeing Company | Structurally integrated antenna aperture and fabrication method |
| US7109942B2 (en) | 2004-10-21 | 2006-09-19 | The Boeing Company | Structurally integrated phased array antenna aperture design and fabrication method |
| US7113142B2 (en) | 2004-10-21 | 2006-09-26 | The Boeing Company | Design and fabrication methodology for a phased array antenna with integrated feed structure-conformal load-bearing concept |
| US20080114506A1 (en) | 2006-11-10 | 2008-05-15 | Davis Christopher L | Hard landing detection |
| US9519857B2 (en) * | 2008-06-30 | 2016-12-13 | Nokia Technologies Oy | Apparatus and method for sensing characterizing features of a deformable structure |
| CN101319890A (zh) * | 2008-07-18 | 2008-12-10 | 东南大学 | 工程科学信息处理的补偿方法 |
| CN101344389B (zh) * | 2008-08-20 | 2010-12-01 | 中国建筑第八工程局有限公司 | 一种利用神经网络预测隧道围岩位移的方法 |
| JP2011112512A (ja) * | 2009-11-26 | 2011-06-09 | Mitsubishi Heavy Ind Ltd | 形状計測装置及び方法並びにプログラム |
| CN101739681B (zh) * | 2009-12-14 | 2011-09-14 | 西北工业大学 | 基于相关预测模型的磁共振图像中检测结构形变的方法 |
| US8264246B2 (en) * | 2010-01-05 | 2012-09-11 | General Electric Company | Electrical network representation of a distributed system |
| US8525830B2 (en) * | 2010-09-17 | 2013-09-03 | The Boeing Company | Point cloud generation system |
| CN102284512B (zh) * | 2011-07-28 | 2013-07-17 | 郑州大学 | 一种大变形管线钢管制造工艺控制方法 |
-
2012
- 2012-03-12 US US13/418,081 patent/US8972310B2/en active Active
-
2013
- 2013-01-09 CA CA2801306A patent/CA2801306C/en active Active
- 2013-01-09 CA CA2923520A patent/CA2923520C/en active Active
- 2013-01-11 AU AU2013200171A patent/AU2013200171B2/en active Active
- 2013-03-11 BR BR102013005796-7A patent/BR102013005796B1/pt active IP Right Grant
- 2013-03-11 CN CN201910603180.5A patent/CN110260837A/zh active Pending
- 2013-03-11 JP JP2013048117A patent/JP6235218B2/ja active Active
- 2013-03-11 CN CN2013100757002A patent/CN103308027A/zh active Pending
- 2013-03-12 EP EP13158719.8A patent/EP2648138A1/en not_active Ceased
-
2015
- 2015-01-13 US US14/596,204 patent/US9256830B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| AU2013200171A1 (en) | 2013-09-26 |
| CA2923520C (en) | 2019-10-01 |
| US20150347915A1 (en) | 2015-12-03 |
| BR102013005796B1 (pt) | 2020-10-20 |
| JP2013190427A (ja) | 2013-09-26 |
| CN103308027A (zh) | 2013-09-18 |
| CA2801306C (en) | 2017-01-31 |
| US8972310B2 (en) | 2015-03-03 |
| CN110260837A (zh) | 2019-09-20 |
| CA2801306A1 (en) | 2013-09-12 |
| US9256830B2 (en) | 2016-02-09 |
| CA2923520A1 (en) | 2013-09-12 |
| AU2013200171B2 (en) | 2014-01-09 |
| US20130238532A1 (en) | 2013-09-12 |
| BR102013005796A2 (pt) | 2016-04-19 |
| EP2648138A1 (en) | 2013-10-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6235218B2 (ja) | 構造変形を識別するための方法および装置 | |
| KR102153755B1 (ko) | 조종면 교정 시스템 | |
| JP7017357B2 (ja) | 航空機モニタリングシステム | |
| Sushchenko et al. | Processing of redundant information in airborne electronic systems by means of neural networks | |
| CN108801166A (zh) | 基于悬臂梁理论的光纤光栅机翼形变测量建模及标定方法 | |
| BR102015027736B1 (pt) | Sistema de arranjo de sensor aerotransportado implementável, e, método | |
| EP2308755B1 (en) | Methods and systems for reducing the structural coupling phenomenon in systems for controlling an air refuelling boom | |
| AU2014201918B2 (en) | Method and apparatus for identifying structural deformation | |
| KR101846019B1 (ko) | 비행체 위치 산출 장치 및 방법 | |
| KR102202426B1 (ko) | 비행체의 자세 및 위치를 식별하는 장치 및 그 방법 | |
| RU2620448C1 (ru) | Способ и устройство для определения ориентации космических или летательных аппаратов | |
| KR101833242B1 (ko) | 비행체 항법 제어 시스템 및 방법 | |
| Bai et al. | Anti-disturbance control of tethered towed vehicle with unknown time-varying aerodynamic parameters and complex disturbance | |
| US20170329350A1 (en) | Vehicle guidance system and method that uses air data from surface-mounted pressure sensors for vehicle orientation control | |
| Rutkovskii et al. | Stabilization of low-frequency vibrations of a large satellite structure with powered gyro control | |
| Boothe et al. | An introduction to the Navy's physics based model of the hose and drogue refueling system-Design and validation | |
| Schirmer et al. | Sensor Fusion Of Structural Finite Element Model With Inertial Sensor Data To Measure Wing Deflection Of A Fixed Wing Aircraft | |
| Cicala et al. | A load alleviation application of an elastic motion estimator for a flexible uav | |
| CN120762440A (zh) | 基于绝缘子检零的无人机控制方法、装置、设备和介质 | |
| CN120800432A (zh) | 实时动态参数更新的传递对准方法、装置以及设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160308 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160308 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170125 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170207 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170426 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170926 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171026 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6235218 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |