JP6260242B2 - 電力変換装置 - Google Patents
電力変換装置 Download PDFInfo
- Publication number
- JP6260242B2 JP6260242B2 JP2013252196A JP2013252196A JP6260242B2 JP 6260242 B2 JP6260242 B2 JP 6260242B2 JP 2013252196 A JP2013252196 A JP 2013252196A JP 2013252196 A JP2013252196 A JP 2013252196A JP 6260242 B2 JP6260242 B2 JP 6260242B2
- Authority
- JP
- Japan
- Prior art keywords
- control
- side switching
- switching elements
- switching
- negative
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Landscapes
- Inverter Devices (AREA)
Description
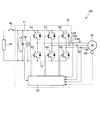
図1は、第1実施形態による電力変換装置10を備えるモータ制御システム100の概略構成図である。
図8及び図9を参照して、本発明の第2実施形態による電力変換装置10を備えるモータ制御システム100について説明する。
10 電力変換装置
20 バッテリ(電源)
30 電動モータ(電動機)
11 正側電源線
12 負側電源線
14 コンデンサ
15 抵抗
50 コントローラ(制御部)
62 保護制御部
62A 電圧測定部
62B 過電圧判定部
63 終了制御部
63A 電流測定部
63B 終了条件判定部
63C 回転数測定部
S1〜S6 スイッチング素子
Claims (6)
- 電源と電動機の間に接続される電力変換装置であって、
電源の正極及び負極にそれぞれ接続される正極側電源線及び負極側電源線と、
前記電動機の各相に設けられるとともに、前記正極側電源線と前記負極側電源線の間において直列に接続される正極側スイッチング素子及び負極側スイッチング素子と、
前記電源の両端間の電圧に基づいて前記電源が過電圧状態であるか否かを判定する電圧状態判定部と、
前記正極側スイッチング素子及び前記負極側スイッチング素子をオン及びオフする制御部と、
前記正極側電源線と前記負極側電源線の間に接続されるコンデンサと、
前記正極側電源線と前記負極側電源線の間において、前記コンデンサに対して並列に接続される抵抗と、を備え、
前記制御部は、前記電源が過電圧状態であると判定された場合に、前記正極側スイッチング素子の全てをオンとし、前記負極側スイッチング素子の全てをオフとする第1制御と、前記負極側スイッチング素子の全てをオンとし、前記正極側スイッチング素子の全てをオフとする第2制御と、を交互に実行し、
前記制御部はさらに、所定のスイッチング周波数に基づいて前記第1制御と前記第2制御とを交互に実行するように構成されており、
前記スイッチング周波数は、前記第1制御及び前記第2制御を実行する時に、前記コンデンサに充電される電気エネルギが前記抵抗で消費される電気エネルギよりも小さくなる周波数に設定される、
ことを特徴とする電力変換装置。 - 前記第1制御には、前記正極側スイッチング素子の全てをオンとし、前記負極側スイッチング素子の全てをオフとした後に、前記正極側スイッチング素子及び前記負極側スイッチング素子の全てをオフとするデッドタイムが含まれ、
前記第2制御には、前記負極側スイッチング素子の全てをオンとし、前記正極側スイッチング素子の全てをオフとした後に、前記正極側スイッチング素子及び前記負極側スイッチング素子の全てをオフとするデッドタイムが含まれる、
ことを特徴とする請求項1に記載の電力変換装置。 - 前記スイッチング周波数は、前記正極側スイッチング素子及び前記負極側スイッチング素子の温度が耐熱温度より低くなる周波数に設定される、
ことを特徴とする請求項1又は2に記載の電力変換装置。 - 前記第1制御及び前記第2制御を交互に実行する保護制御を終了する終了条件が成立したか否かを判定する条件判定部をさらに備え、
前記制御部は、前記終了条件が成立した場合に、前記正極側スイッチング素子及び前記負極側スイッチング素子の全てをオフとする第3制御を実行する
ことを特徴とする請求項1から3のいずれか一つに記載の電力変換装置。 - 前記電動機に流れている電流を検出する電流検出部をさらに備え、
前記条件判定部は、検出された電流値が基準電流値よりも小さい場合に、前記終了条件が成立したと判定するように構成され、
前記基準電流値は、前記第3制御を実行した時に、前記コンデンサに充電される電気エネルギが前記抵抗で消費される電気エネルギよりも小さくなる電流値に設定される、
ことを特徴とする請求項4に記載の電力変換装置。 - 前記電動機の回転数を検出する回転数検出部をさらに備え、
前記条件判定部は、検出された回転数が基準回転数よりも小さい場合に、前記終了条件が成立したと判定するように構成され、
前記基準回転数は、前記第3制御を実行した時に、前記コンデンサに充電される電気エネルギが前記抵抗で消費される電気エネルギよりも小さくなる回転数に設定される、
ことを特徴とする請求項4に記載の電力変換装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013252196A JP6260242B2 (ja) | 2013-12-05 | 2013-12-05 | 電力変換装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013252196A JP6260242B2 (ja) | 2013-12-05 | 2013-12-05 | 電力変換装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015109773A JP2015109773A (ja) | 2015-06-11 |
| JP6260242B2 true JP6260242B2 (ja) | 2018-01-17 |
Family
ID=53439741
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013252196A Active JP6260242B2 (ja) | 2013-12-05 | 2013-12-05 | 電力変換装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6260242B2 (ja) |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5547559B2 (ja) * | 2010-06-16 | 2014-07-16 | 日立オートモティブシステムズ株式会社 | 電力変換装置 |
| JP5857394B2 (ja) * | 2010-09-15 | 2016-02-10 | 日産自動車株式会社 | インバータ装置及びインバータ制御方法 |
| JP2012249397A (ja) * | 2011-05-27 | 2012-12-13 | Hitachi Appliances Inc | モータ制御装置およびこれを備えた空気調和機 |
-
2013
- 2013-12-05 JP JP2013252196A patent/JP6260242B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015109773A (ja) | 2015-06-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6169203B1 (ja) | 電動機制御装置および電動機制御方法 | |
| US8786238B2 (en) | Drive system for rotating electric machine | |
| CN103348586B (zh) | 逆变器装置和逆变器控制方法 | |
| JP5954356B2 (ja) | 電動車両 | |
| JP5630474B2 (ja) | インバータ | |
| US8736234B2 (en) | Power converter control apparatus | |
| US20180236874A1 (en) | Electric power system | |
| JP3724344B2 (ja) | 電動機制御装置 | |
| WO2011118259A1 (ja) | 放電制御装置 | |
| KR20120061660A (ko) | 하이브리드 자동차 및 전기자동차의 인버터 고장 검출 방법 | |
| CN108134558A (zh) | 电动机系统的控制装置及温度检测状态判定方法 | |
| JP5441481B2 (ja) | インバータ装置の故障診断方法 | |
| US9680404B2 (en) | Abnormality detection apparatus and abnormality detection method | |
| US20150015168A1 (en) | Vehicular driving system | |
| US9941815B2 (en) | Power conversion apparatus with overcurrent simulating circuit | |
| JP2016093018A (ja) | インバータ制御装置 | |
| JP2012239247A (ja) | モータ制御装置 | |
| JP6079455B2 (ja) | 充電装置及び制御方法 | |
| JP6260242B2 (ja) | 電力変換装置 | |
| JP5615427B2 (ja) | 交流モータ駆動装置 | |
| JP2012147571A (ja) | インバータ装置および電動機ドライブシステム | |
| JP5565087B2 (ja) | 電力変換システムの放電装置 | |
| JP7370775B2 (ja) | 電力変換装置、および電力変換装置の制御方法 | |
| JP6451533B2 (ja) | 電流センサ異常診断装置 | |
| JP2009219225A (ja) | 車両駆動システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160926 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20161205 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170721 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170801 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170831 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171010 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171031 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171114 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171127 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6260242 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |