JP6286430B2 - 入力状態検出装置 - Google Patents
入力状態検出装置 Download PDFInfo
- Publication number
- JP6286430B2 JP6286430B2 JP2015529468A JP2015529468A JP6286430B2 JP 6286430 B2 JP6286430 B2 JP 6286430B2 JP 2015529468 A JP2015529468 A JP 2015529468A JP 2015529468 A JP2015529468 A JP 2015529468A JP 6286430 B2 JP6286430 B2 JP 6286430B2
- Authority
- JP
- Japan
- Prior art keywords
- state
- detection
- mode
- contact
- pressing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/0416—Control or interface arrangements specially adapted for digitisers
- G06F3/0418—Control or interface arrangements specially adapted for digitisers for error correction or compensation, e.g. based on parallax, calibration or alignment
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F1/00—Details not covered by groups G06F3/00 - G06F13/00 and G06F21/00
- G06F1/26—Power supply means, e.g. regulation thereof
- G06F1/32—Means for saving power
- G06F1/3203—Power management, i.e. event-based initiation of a power-saving mode
- G06F1/3234—Power saving characterised by the action undertaken
- G06F1/325—Power saving in peripheral device
- G06F1/3262—Power saving in digitizer or tablet
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/0416—Control or interface arrangements specially adapted for digitisers
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/044—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means
- G06F3/0445—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means using two or more layers of sensing electrodes, e.g. using two layers of electrodes separated by a dielectric layer
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03K—PULSE TECHNIQUE
- H03K17/00—Electronic switching or gating, i.e. not by contact-making and –breaking
- H03K17/94—Electronic switching or gating, i.e. not by contact-making and –breaking characterised by the way in which the control signals are generated
- H03K17/96—Touch switches
- H03K17/962—Capacitive touch switches
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2203/00—Indexing scheme relating to G06F3/00 - G06F3/048
- G06F2203/041—Indexing scheme relating to G06F3/041 - G06F3/045
- G06F2203/04101—2.5D-digitiser, i.e. digitiser detecting the X/Y position of the input means, finger or stylus, also when it does not touch, but is proximate to the digitiser's interaction surface and also measures the distance of the input means within a short range in the Z direction, possibly with a separate measurement setup
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
- Push-Button Switches (AREA)
Description
好ましくは、前記入力検出部は、前記第二状態における前記検出器の検出値に基づいて、前記対象物が前記第二電極へ付与した押付力の大きさを検出する。上述したように、第二状態において、検出端子における電位または検出端子から流れる電流は、実質的に、静電容量型センサの静電容量に影響を受ける。そこで、第二状態において、検出器の検出値に基づいて、静電容量型センサの静電容量の相当値を検出できる。そして、静電容量型センサの静電容量は、対象物による押付力の大きさに相当する。つまり、検出器の検出値に基づいて、対象物による押付力の大きさを検出できる。
入力検出部は、各モードにおいて第一閾値または第二閾値を用いることで、対象物の状態の変化を確実に判定できる。従って、制御部は、各モードの切り替えを適切に行うことができる。
(1.入力状態検出装置の概要)
本実施形態の入力状態検出装置は、静電容量型センサユニット10を備え、導電性の対象物が当該センサユニット10に接触したこと、および、当該センサユニット10を押し付けたことを検出する。例えば、導電性の対象物は、人間の指として、人間の指が当該センサユニット10に接触したこと、および、人間の指によって当該センサユニット10を押し付けたことを検出する。さらに、人間の指によって当該センサユニット10を押し付けた状態において、入力状態検出装置は、押付力を検出することもできる。
入力状態検出装置は、上述したように、静電容量型センサユニット10を備える。まず、静電容量型センサユニット10について、図1および図2を参照して説明する。静電容量型センサユニット10は、後述する複数個の静電容量型センサ1を構成する。ただし、静電容量型センサユニット10は、1個の静電容量型センサ1を構成するようにしてもよい。
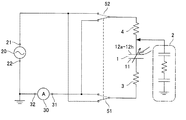
次に、入力状態検出装置において、静電容量型センサユニット10以外の構成について図1を参照して説明する。入力状態検出装置は、図1に示すように、静電容量型センサユニット10の他に、定電圧電源装置20、電流計30、電極側切替部40、状態切替部50、制御部60、入力検出部70を備える。
次に、上述した入力状態検出装置の等価回路について、図3を参照して説明する。図3は、静電容量型センサユニット10の任意の静電容量型センサ1を計測対象とした場合の等価回路を示す。
次に、第一状態において、対象物である人間の指2が表皮層15に接触した場合を考える。このときの回路は、図4に示すようになる。つまり、第一電極11側に定電圧電源装置20により周期的な電圧が印加される。一方、第二電極12a〜12hが、抵抗4を介して電流計30の検出端子31に接続される。そして、人間の指2は、第二電極12a〜12hと電流計30の検出端子31との間に接続される。つまり、人間の指2の等価回路が、静電容量型センサ1に直列接続され、且つ、電流計30および抵抗4の直列回路に対して並列接続される。
次に、第二状態において、対象物である人間の指2が表皮層15に対して押付力を付与した場合を考える。このときの回路は、図5に示すようになる。つまり、第二電極12a〜12h側に定電圧電源装置20により周期的な定電圧が印加される。一方、第一電極11が、抵抗3を介して電流計30の検出端子31に接続される。そして、人間の指2は、静電容量型センサ1と定電圧電源装置20の印加端子21との間に接続される。つまり、人間の指2の等価回路が、静電容量型センサ1、電流計30および抵抗3の直列回路に対して並列接続される。
次に、制御部60により状態切替部50の第一,第二スイッチ51,52の切替タイミングについて、図6を参照して説明する。
第二実施形態の入力状態検出装置について、図7および図8を参照して説明する。本実施形態の入力状態検出装置は、第一実施形態の入力状態検出装置に対して、制御部160および入力検出部170が相違する。他の構成は、同一符号を付して、説明を省略する。

第三実施形態の入力状態検出装置における制御部160の動作について、図9を参照して説明する。本実施形態の入力状態検出装置は、第二実施形態の入力状態検出装置と実質的に同様の構成となる。
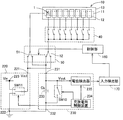
第一〜第三実施形態においては、複数の静電容量型センサ1が一列に並んで構成される。図10に示すように、入力状態検出装置は、複数の静電容量型センサユニット10,10と、それぞれに対応する複数の定電圧電源装置20,20、複数の電流計30,30、複数の電極側切替部40,40、複数の状態切替部50,50と、共通の制御部60、共通の入力検出部70を備える。
上記実施形態においては、入力状態検出装置は、電流計30を用いて検出端子31に流れる電流を検出することで、非接触状態、接触非押付状態および押付状態を検出した。この他に、入力状態検出装置は、以下の検出器230を用いて、検出端子231における電位を検出することで、入力状態を検出することができる。
検出器230を用いる入力状態検出装置について、図11を参照して説明する。入力状態検出装置は、静電容量型センサユニット10、定電圧電源装置220、検出器230、電極側切替部40、状態切替部50、制御部160、入力検出部170を備える。ここで、本実施形態における定電圧電源装置220および検出器230以外の構成は、第一実施形態または第二実施形態において同一符号を付す構成と同様である。
人間の指2が表皮層15に対して非接触状態のときの入力状態検出装置の等価回路は、図12に示すような回路となる。入力用スイッチング素子SW11が定電圧電源223側に接続される状態において、出力電位Vout0は、静電容量型センサ1の静電容量Cn0、ブリッジ用キャパシタ233の静電容量Cb、入力電圧Vinによって、式(2)のように表される。
次に、人間の指2が表皮層15に対して非接触状態のときにおいて、充放電用制御装置234が実行する充放電用スイッチング素子SW10の開閉のタイミングと、静電容量型センサ1の一方の電位Vin1および出力電位Voutの関係について、図13を参照して説明する。T11〜T12において、充放電用スイッチング素子SW10がON(閉状態)とされる。また、入力用スイッチング素子SW11がグランド電位側に接続される。従って、静電容量型センサ1の一方の電位Vin1が、グランド電位となる。
第一状態において、人間の指2が表皮層15に対して接触非押付状態のときの入力状態検出装置の等価回路は、図14に示すような回路となる。ここで、便宜上、人間の指2の静電容量をCyとする。入力用スイッチング素子SW11が定電圧電源223側に接続される状態において、出力電位Vout1は、静電容量型センサ1の静電容量Cn0、ブリッジ用キャパシタ233の静電容量Cb、入力電圧Vin、人間の指2の静電容量Cyによって、式(3)のように表される。ここで、接触非押付状態においては、静電容量型センサ1の静電容量Cn0は、実質上、一定値である。
上記において、入力状態検出装置は、常に、第一状態による検出と第二状態の検出の何れかを行うこととした。つまり、入力状態検出装置は、第一状態と第二状態の何れかによる検出を連続的に行った。この他に、入力状態検出装置は、第一状態と第二状態の何れかによる検出を所定の周期で断続的に行ってもよい。このようにすることで、状態切替部50による切替動作の回数がさらに少なくなり、より消費エネルギーが低減する。
Claims (10)
- 基材に取り付けられる第一電極と、接触する導電性の対象物側に位置する第二電極と、前記第一電極と前記第二電極との間に配置されると共に前記対象物による前記第二電極への押付力によって圧縮される誘電層とを備える静電容量型センサと、
印加端子を前記静電容量型センサ側に接続し、前記静電容量型センサに対して所定電圧を印加する定電圧電源装置と、
前記静電容量型センサに直列接続され、検出端子を前記静電容量型センサ側に接続し、前記静電容量型センサの静電容量および前記対象物の静電容量に応じて変化する前記検出端子における電位または前記検出端子から流れる電流を検出する検出器と、
前記定電圧電源装置の印加端子を前記第一電極側に接続し、かつ、前記検出器の検出端子を前記第二電極側に接続する第一状態と、前記定電圧電源装置の印加端子を前記第二電極側に接続し、かつ、前記検出器の検出端子を前記第一電極側に接続する第二状態とを切替可能な状態切替部と、
前記第一状態における前記検出器の検出値に基づいて前記対象物が前記静電容量型センサにおける前記第二電極側の面に対して非接触状態であるか接触非押付状態であるかを検出すると共に、前記第二状態における前記検出器の検出値に基づいて前記対象物が前記第二電極に対して接触非押付状態であるか押付状態であるかを検出する入力検出部と、
を備え、
前記検出器は、
前記検出器の前記検出端子とグランド電位との間に接続されるブリッジ用キャパシタと、
前記ブリッジ用キャパシタに対して並列接続され、閉状態時に前記検出端子の電荷をグランド電位に放電する充放電用スイッチング素子と、
前記定電圧電源装置が前記静電容量型センサに対して前記所定電圧を印加していない状態において、前記検出端子の電荷をグランド電位に放電する工程と、前記放電する工程の後に、前記充放電用スイッチング素子を開状態にし且つ前記定電圧電源装置により前記所定電圧が印加される状態にすることで、前記静電容量型センサに充電する工程とを実行する充放電用制御装置と、
前記充放電用制御装置による前記充電する工程において、前記静電容量型センサの静電容量および前記対象物の静電容量に応じた値として、前記検出端子の電位を検出する電位検出器と、
を備える、入力状態検出装置。 - 前記入力検出部は、前記第二状態における前記検出器の検出値に基づいて、前記対象物が前記第二電極へ付与した押付力の大きさを検出する、請求項1に記載の入力状態検出装置。
- 前記入力状態検出装置は、前記状態切替部の状態を制御する制御部を備え、
前記制御部は、前記状態切替部を前記第一状態と前記第二状態とに周期的に切り替え、
前記入力検出部は、前記非接触状態であるか前記接触非押付状態であるかの検出と、前記接触非押付状態であるか前記押付状態であるかの検出とを周期的に行う、請求項1または2に記載の入力状態検出装置。 - 前記状態切替部に前記第一状態を継続させるモードは第一モードとし、前記状態切替部に前記第二状態を継続させるモードは第二モードとし、前記状態切替部に前記第一状態と前記第二状態とを周期的に交互に切り替えさせるモードは第三モードとし、
前記入力状態検出装置は、前記状態切替部のモードを制御する制御部を備え、
前記制御部は、
前記非接触状態から前記接触非押付状態に変化するときに、前記状態切替部を前記第一モードから前記第三モードに切り替え、
前記接触非押付状態から前記非接触状態に変化するときに、前記状態切替部を前記第三モードから前記第一モードに切り替え、
前記接触非押付状態から前記押付状態に変化するときに、前記状態切替部を前記第三モードから前記第二モードに切り替え、
前記押付状態から前記接触非押付状態に変化するときに、前記状態切替部を前記第二モードから前記第三モードに切り替える、
請求項1〜3の何れか一項に記載の入力状態検出装置。 - 前記入力検出部は、
前記第一モードのときに前記第一状態における前記検出器の検出値が第一閾値を下回ることで前記非接触状態から前記接触非押付状態に変化すると判定し、
前記第三モードのときに前記第一状態における前記検出器の検出値が前記第一閾値を上回ることで前記接触非押付状態から前記非接触状態に変化すると判定し、
前記第三モードのときに前記第二状態における前記検出器の検出値が第二閾値を上回ることで前記接触非押付状態から前記押付状態に変化すると判定し、
前記第二モードのときに前記第二状態における前記検出器の検出値が前記第二閾値を下回ることで前記押付状態から前記接触非押付状態に変化すると判定し、
前記制御部は、前記入力検出部による判定に基づいて、前記非接触状態、前記接触非押付状態および前記押付状態の変化を取得する、
請求項4に記載の入力状態検出装置。 - 前記接触非押付状態のときの前記第一状態における前記検出器の検出値と前記第一閾値との差が、前記接触非押付状態のときの前記第二状態における前記検出器の検出値と前記第二閾値との差より大きくなるように、
前記第一閾値および前記第二閾値が設定される、
請求項5に記載の入力状態検出装置。 - 前記状態切替部に前記第一状態を継続させるモードは第一モードとし、前記状態切替部に前記第二状態を継続させるモードは第二モードとし、
前記入力状態検出装置は、前記状態切替部の状態を制御する制御部を備え、
前記制御部は、
前記非接触状態から前記接触非押付状態に変化するときに、前記状態切替部を前記第一モードから前記第二モードに切り替え、
前記押付状態から前記接触非押付状態に変化するときに、前記状態切替部を前記第二モードから前記第一モードに切り替える、
請求項1または2に記載の入力状態検出装置。 - 前記第一電極および前記第二電極の少なくとも何れか一方を複数備えることにより、複数個の静電容量型センサを構成し、
前記入力検出部は、前記対象物が存在する位置を検出する、請求項1〜7の何れか一項に記載の入力状態検出装置。 - 前記誘電層はエラストマーまたは樹脂で形成される、請求項1〜8の何れか一項に記載の入力状態検出装置。
- 前記第一電極および前記第二電極は、エラストマーに導電性フィラーを配合させることによって形成される、請求項1〜9の何れか一項に記載の入力状態検出装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013157806 | 2013-07-30 | ||
| JP2013157806 | 2013-07-30 | ||
| PCT/JP2014/067440 WO2015015983A1 (ja) | 2013-07-30 | 2014-06-30 | 入力状態検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2015015983A1 JPWO2015015983A1 (ja) | 2017-03-02 |
| JP6286430B2 true JP6286430B2 (ja) | 2018-02-28 |
Family
ID=52431524
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015529468A Active JP6286430B2 (ja) | 2013-07-30 | 2014-06-30 | 入力状態検出装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10133413B2 (ja) |
| EP (1) | EP2950190B1 (ja) |
| JP (1) | JP6286430B2 (ja) |
| CN (1) | CN105453008B (ja) |
| WO (1) | WO2015015983A1 (ja) |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9660646B1 (en) * | 2013-03-10 | 2017-05-23 | Apple Inc. | Multiple controllers for a capacitive sensing device |
| DE112015005942B4 (de) * | 2015-01-13 | 2026-04-02 | Sumitomo Riko Company Limited | Kapazitätsmessvorrichtung, kapazitätstypartige Flachsensoreinrichtung und kapazitätstypartige Flüssigkeitspegeldetektionseinrichtung |
| JP2016167252A (ja) * | 2015-03-02 | 2016-09-15 | 学校法人福岡大学 | 近接・接触センサ及び情報端末 |
| SE1650548A1 (en) * | 2016-04-22 | 2017-10-23 | Fingerprint Cards Ab | Fingerprint sensing system with sensing reference potential providing circuitry |
| IT201600103234A1 (it) | 2016-10-14 | 2018-04-14 | Green Seas Ventures Ldt | Sistema Costruttivo afferente un sensore capacitivo di tensione |
| CN108334222A (zh) * | 2017-01-19 | 2018-07-27 | 希迪普公司 | 触摸输入装置 |
| DE102017106207A1 (de) * | 2017-03-22 | 2018-09-27 | Fm Marketing Gmbh | Rasterplatte |
| JP2018163807A (ja) * | 2017-03-27 | 2018-10-18 | Smk株式会社 | 感圧式静電スイッチ及び電気装置 |
| JP6996355B2 (ja) * | 2018-03-06 | 2022-01-17 | 株式会社デンソー | 静電容量式操作装置 |
| IT201800004114A1 (it) | 2018-03-30 | 2019-09-30 | Green Seas Ventures Ltd C/O Citco B V I Ltd | Sistema costruttivo afferente un sensore capacitivo di tensione |
| DE102018205084A1 (de) * | 2018-04-04 | 2019-10-10 | Audi Ag | Kapazitives Sensorbauteil |
| CN119986166A (zh) | 2018-12-17 | 2025-05-13 | G&W电气公司 | 电传感器组合件 |
| US11340266B2 (en) | 2018-12-17 | 2022-05-24 | G & W Electric Company | Electrical sensor assembly |
| JP7216963B2 (ja) * | 2019-10-03 | 2023-02-02 | 本田技研工業株式会社 | 静電容量型検知センサ、静電容量型検知センサモジュールおよび静電容量型検知センサを用いた状態判定方法 |
| TWI744760B (zh) * | 2019-12-30 | 2021-11-01 | 財團法人工業技術研究院 | 靜電感測系統與靜電感測組件 |
| TWI768439B (zh) * | 2020-08-20 | 2022-06-21 | 黃湘豪 | 非入侵式通訊檢查和控制裝置 |
| JP7595321B2 (ja) * | 2021-01-14 | 2024-12-06 | 本田技研工業株式会社 | 計測装置 |
| JP7542448B2 (ja) * | 2021-01-14 | 2024-08-30 | 株式会社ジャパンディスプレイ | 圧力センサ |
| US11755095B2 (en) | 2021-07-19 | 2023-09-12 | Stmicroelectronics S.R.L. | Bag detection using an electrostatic charge sensor |
| JP7471368B2 (ja) * | 2022-09-30 | 2024-04-19 | 住友理工株式会社 | 接触検知装置 |
| CN116899770A (zh) * | 2023-07-12 | 2023-10-20 | 珠海格力电器股份有限公司 | 花洒及其控制方法、装置、存储介质以及电子设备 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| BE1007462A3 (nl) * | 1993-08-26 | 1995-07-04 | Philips Electronics Nv | Dataverwerkings inrichting met aanraakscherm en krachtopnemer. |
| JP3001395B2 (ja) * | 1995-04-04 | 2000-01-24 | 株式会社ワコム | 位置検出装置及び位置検出方法 |
| JP3394187B2 (ja) * | 1997-08-08 | 2003-04-07 | シャープ株式会社 | 座標入力装置および表示一体型座標入力装置 |
| CN104965621B (zh) * | 2006-06-09 | 2018-06-12 | 苹果公司 | 触摸屏液晶显示器及其操作方法 |
| CN101490642A (zh) * | 2006-07-18 | 2009-07-22 | Iee国际电子工程股份公司 | 输入设备 |
| US8063886B2 (en) * | 2006-07-18 | 2011-11-22 | Iee International Electronics & Engineering S.A. | Data input device |
| JP2010217967A (ja) * | 2009-03-13 | 2010-09-30 | Alps Electric Co Ltd | 入力装置 |
| KR101578075B1 (ko) * | 2009-04-20 | 2015-12-17 | 삼성디스플레이 주식회사 | 터치 검출 방법 및 이를 수행하기 위한 터치 검출 장치 |
| JP5396335B2 (ja) * | 2009-05-28 | 2014-01-22 | 株式会社半導体エネルギー研究所 | タッチパネル |
| JP2012022635A (ja) * | 2010-07-16 | 2012-02-02 | Alps Electric Co Ltd | 静電容量式近接センサ装置、及びそれを用いた静電容量式モーション検出装置 |
| EP2690786A1 (en) * | 2012-07-25 | 2014-01-29 | Electrolux Home Products Corporation N.V. | A control device, in particular for a domestic appliance |
| JP6248406B2 (ja) * | 2013-04-09 | 2017-12-20 | 日本電産リード株式会社 | 検査装置及び検査方法 |
| US9279841B2 (en) * | 2013-07-29 | 2016-03-08 | Tritan Technology Inc. | Integratable capacitive touch sensing circuit through charge sharing |
-
2014
- 2014-06-30 JP JP2015529468A patent/JP6286430B2/ja active Active
- 2014-06-30 EP EP14831907.2A patent/EP2950190B1/en active Active
- 2014-06-30 CN CN201480043281.7A patent/CN105453008B/zh active Active
- 2014-06-30 WO PCT/JP2014/067440 patent/WO2015015983A1/ja not_active Ceased
-
2015
- 2015-07-28 US US14/810,716 patent/US10133413B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2015015983A1 (ja) | 2017-03-02 |
| US10133413B2 (en) | 2018-11-20 |
| EP2950190B1 (en) | 2019-05-22 |
| US20150346907A1 (en) | 2015-12-03 |
| WO2015015983A1 (ja) | 2015-02-05 |
| CN105453008A (zh) | 2016-03-30 |
| CN105453008B (zh) | 2018-09-07 |
| EP2950190A4 (en) | 2016-08-24 |
| EP2950190A1 (en) | 2015-12-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6286430B2 (ja) | 入力状態検出装置 | |
| JP5326042B2 (ja) | 静電容量型センサ装置および静電容量型センサの静電容量計測装置 | |
| KR101742604B1 (ko) | 용량성 전압 분배기 터치 센서 | |
| CN109154872B (zh) | 用于检测和表征表面上的力输入的系统和方法 | |
| CN106461713B (zh) | 静电电容测量装置、静电电容型面状传感器装置以及静电电容型液位检测装置 | |
| JP4897886B2 (ja) | 静電容量型近接センサおよび近接検知方法 | |
| CN102893241B (zh) | 检测触摸输入并生成可感知的触摸刺激 | |
| EP3210305A1 (en) | Analog elimination of ungrounded conductive objects in capacitive sensing | |
| KR20150129643A (ko) | 정전식 스타일러스 | |
| US20170010130A1 (en) | Pliable capacitive structure apparatus and methods | |
| JP6183042B2 (ja) | タッチセンサ | |
| JP5666711B2 (ja) | タッチ認識方法と、タッチキー構造と、タッチデバイス | |
| JP7296603B2 (ja) | 検出回路および荷重検出装置 | |
| JP6182031B2 (ja) | 静電容量計測装置、静電容量型面状センサ装置および静電容量型液位検出装置 | |
| CN108351718A (zh) | 指示接收装置、信息处理装置、信号处理方法及程序 | |
| CN101738542A (zh) | 抗干扰的电容检测装置及方法 | |
| JP2015219703A (ja) | 静電検出装置 | |
| CN118159814A (zh) | 载荷检测装置 | |
| JP6194860B2 (ja) | タッチセンサ | |
| JP5721745B2 (ja) | 多数の容量性センサ素子の静電容量を決定するための回路装置 | |
| EP2722985B1 (en) | Method of differential measurement of voltage levels of capacitive change. | |
| KR20210032026A (ko) | 사용자 의도 센싱 장치 | |
| KR20250096171A (ko) | 포스와 터치의 통합 센서 | |
| WO2024070102A1 (ja) | 荷重検出装置および検出回路 | |
| JP5876257B2 (ja) | 静電容量型センサ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170306 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171114 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180115 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180125 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180205 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6286430 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |