JP6286677B2 - 測距システム、及び撮像センサ - Google Patents
測距システム、及び撮像センサ Download PDFInfo
- Publication number
- JP6286677B2 JP6286677B2 JP2015523843A JP2015523843A JP6286677B2 JP 6286677 B2 JP6286677 B2 JP 6286677B2 JP 2015523843 A JP2015523843 A JP 2015523843A JP 2015523843 A JP2015523843 A JP 2015523843A JP 6286677 B2 JP6286677 B2 JP 6286677B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- tof
- pixel
- light
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4865—Time delay measurement, e.g. time-of-flight measurement, time of arrival measurement or determining the exact position of a peak
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/10—Systems determining position data of a target for measuring distance only using transmission of interrupted, pulse-modulated waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
- G01S17/894—Three-dimensional [3D] imaging with simultaneous measurement of time-of-flight at a two-dimensional [2D] array of receiver pixels, e.g. time-of-flight cameras or flash lidar
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/497—Means for monitoring or calibrating
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Measurement Of Optical Distance (AREA)
Description
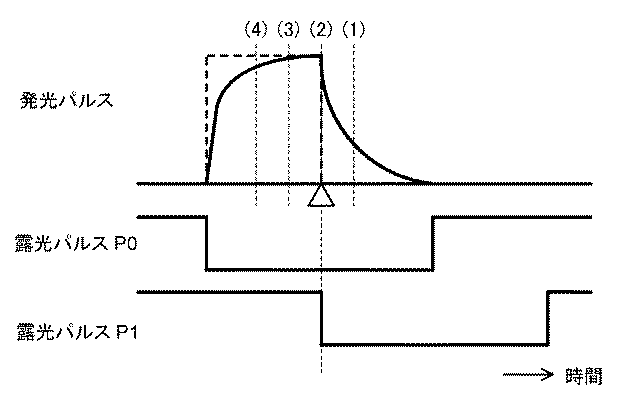
図8は、本発明の第1実施形態に係る測距システムの構成を示すブロック図である。図8の測距システム100は、光源部1と、受光部2と、TOF演算部3と、検出部4と、補正部5と、制御部6と、透明板7と、マーカー8とより構成される。透明板7は例えばガラスからなる。
図13は、本発明の第2実施形態に係る測距システムの構成を示すブロック図である。図13の測距システム101の構成は、第1実施形態の測距システム100と同じ構成に対して、TOF演算部3をTOF演算部32に変更し、検出部4を検出部42に変更し、透明板7の内側の受光部2の周辺を低反射板9で覆った一部にマーカーの実体82を設置したものであり、特に受光部2の画角外にマーカーの実体82を設置したものである。
2 受光部
3,32 TOF演算部
4,42 検出部
5 補正部
6 制御部
7 透明板
8 マーカー
9 低反射板
82 マーカーの実体
83 マーカーの虚像
100,101 測距システム
Claims (11)
- TOF(time of flight)方式の測距システムであって、
発光信号が示すタイミングに従って光を照射する光源部と、
露光信号が示すタイミングに従って対象物からの反射光を撮像センサに露光させることで前記撮像センサから画素毎のRAWデータを得る受光部と、
前記光源部及び前記受光部に対して定位置に固定された透明板と、
前記透明板の表面上に配置され、前記光源部及び前記受光部に対して定位置に配置されたマーカーと、
前記RAWデータをもとに算出した前記対象物までの画素毎の距離を表すTOF信号を供給するTOF演算部と、
前記撮像センサ上の基準画素についての前記TOF信号と基準値との差分を検出し、当該差分に応じて位相制御信号と微調信号とのうち少なくとも一方を生成する検出部と、
前記微調信号が生成された場合には、前記微調信号をもとに前記TOF信号を補正し、その結果を画素毎の距離情報として出力する補正部として機能し、前記位相制御信号が生成された場合には、前記位相制御信号をもとに前記発光信号と前記露光信号とのうち少なくとも一方の位相シフトを制御する制御部として機能する補正制御部とを備え、
前記基準画素は、前記マーカーからの光を受光する画素であり、かつ、前記基準値は、前記受光部から前記マーカーまでの既知の光路距離より算出された値である測距システム。 - 請求項1記載の測距システムにおいて、
前記マーカーは、前記光源部及び前記受光部に対して定位置に固定されている測距システム。 - TOF(time of flight)方式の測距システムであって、
発光信号が示すタイミングに従って光を照射する光源部と、
露光信号が示すタイミングに従って対象物からの反射光を撮像センサに露光させることで前記撮像センサから画素毎のRAWデータを得る受光部と、
前記光源部及び前記受光部に対して定位置に固定された透明板と、
前記光源部及び前記受光部に対して定位置に配置されたマーカーと、
前記RAWデータをもとに算出した前記対象物までの画素毎の距離を表すTOF信号を供給するTOF演算部と、
前記撮像センサ上の基準画素についての前記TOF信号と基準値との差分を検出し、当該差分に応じて位相制御信号と微調信号とのうち少なくとも一方を生成する検出部と、
前記微調信号が生成された場合には、前記微調信号をもとに前記TOF信号を補正し、その結果を画素毎の距離情報として出力する補正部として機能し、前記位相制御信号が生成された場合には、前記位相制御信号をもとに前記発光信号と前記露光信号とのうち少なくとも一方の位相シフトを制御する制御部として機能する補正制御部とを備え、
前記基準画素は、前記マーカーからの光を受光する画素であり、かつ、前記基準値は、前記受光部から前記マーカーまでの既知の光路距離より算出された値であり、
前記マーカーは、前記透明板の表面における反射により前記マーカーの虚像が前記受光部の画角内に生じるように、前記受光部の画角外に配置された測距システム。 - TOF(time of flight)方式の測距システムであって、
発光信号が示すタイミングに従って光を照射する光源部と、
露光信号が示すタイミングに従って対象物からの反射光を撮像センサに露光させることで前記撮像センサから画素毎のRAWデータを得る受光部と、
前記RAWデータをもとに算出した前記対象物までの画素毎の距離を表すTOF信号を供給するTOF演算部と、
前記撮像センサ上の基準画素についての前記TOF信号と基準値との差分を検出し、当該差分に応じて位相制御信号と微調信号とのうち少なくとも一方を生成する検出部と、
前記微調信号が生成された場合には、前記微調信号をもとに前記TOF信号を補正し、その結果を画素毎の距離情報として出力する補正部として機能し、前記位相制御信号が生成された場合には、前記位相制御信号をもとに前記発光信号と前記露光信号とのうち少なくとも一方の位相シフトを制御する制御部として機能する補正制御部とを備え、
前記TOF演算部は、前記対象物が存在しない状態で前記受光部から前記基準画素について受けたRAWデータを予め基準RAWデータとして保持し、前記対象物が存在する通常動作においては前記受光部から受けたRAWデータから前記基準RAWデータを減算した結果をもとに前記基準画素についての前記対象物までの距離を算出する測距システム。 - TOF(time of flight)方式の測距システムであって、
発光信号が示すタイミングに従って光を照射する光源部と、
露光信号が示すタイミングに従って対象物からの反射光を撮像センサに露光させることで前記撮像センサから画素毎のRAWデータを得る受光部と、
前記光源部及び前記受光部に対して定位置に固定された透明板と、
前記透明板上の所定の範囲へ参照光を照射する参照光源部と、
前記RAWデータをもとに算出した前記対象物までの画素毎の距離を表すTOF信号を供給するTOF演算部と、
前記撮像センサ上の基準画素についての前記TOF信号と基準値との差分を検出し、当該差分に応じて位相制御信号と微調信号とのうち少なくとも一方を生成する検出部と、
前記微調信号が生成された場合には、前記微調信号をもとに前記TOF信号を補正し、その結果を画素毎の距離情報として出力する補正部として機能し、前記位相制御信号が生成された場合には、前記位相制御信号をもとに前記発光信号と前記露光信号とのうち少なくとも一方の位相シフトを制御する制御部として機能する補正制御部とを備え、
前記基準値は、前記参照光が前記透明板の表面で反射して前記撮像センサ上に得られる像の画素数をもとに決定される測距システム。 - 請求項1〜5記載の測距システムにおいて、
前記マーカーにそれぞれ対応する複数の基準画素を前記撮像センサ上に備え、
前記複数の基準画素の各々に対して前記基準値が設定された測距システム。 - 請求項1〜5記載の測距システムにおいて、
前記基準画素と前記基準値とのうち少なくとも一方は、外部より変更可能である測距システム。 - 請求項1〜5記載の測距システムにおいて、
前記受光部から互いに異なる距離に配置された複数のマーカーを更に備え、
前記検出部は、前記複数のマーカーに対応する前記撮像センサ上の複数の基準画素の各々についての前記TOF信号と各基準値との差分と、前記複数の基準画素のうちの1つの基準画素についての前記TOF信号のバラツキ量とに応じて、前記位相制御信号を生成する測距システム。 - 請求項1〜5記載の測距システムにおいて、
前記検出部は、前記基準画素のRAWデータと所定の閾値との差分が所定値よりも大きいときは、当該基準画素での前記位相制御信号と前記微調信号との生成を行わない測距システム。 - 発光信号が示すタイミングに従って光を照射する光源部と、
撮像センサから画素毎のRAWデータを得る受光部と、
前記光源部及び前記受光部に対して定位置に固定された透明板と、
前記透明板の表面上に配置され、前記光源部及び前記受光部に対して定位置に配置されたマーカーと、
前記RAWデータをもとに算出した前記対象物までの画素毎の距離を表すTOF信号を供給するTOF演算部と、
前記撮像センサ上の基準画素についての前記TOF信号と基準値との差分を検出し、当該差分に応じて位相制御信号と微調信号とのうち少なくとも一方を生成する検出部と、
前記微調信号が生成された場合には、前記微調信号をもとに前記TOF信号を補正し、その結果を画素毎の距離情報として出力する補正部として機能し、前記位相制御信号が生成された場合には、前記位相制御信号をもとに前記発光信号と前記露光信号とのうち少なくとも一方の位相シフトを制御する制御部として機能する補正制御部と、
を備え、前記基準値は、前記受光部から前記マーカーまでの既知の光路距離より算出された値であるTOF(time of flight)方式の測距システムに用いる前記受光部の撮像センサであって、
前記撮像センサが備える前記基準画素は、
露光信号が示すタイミングに従って対象物からの反射光を露光し、前記マーカーからの光を受光する画素である撮像センサ。 - 請求項10記載の撮像センサにおいて、
前記マーカーにそれぞれ対応する複数の前記基準画素を備え、
前記複数の基準画素の各々に対して、前記受光部から前記マーカーまでの既知の光路距離より算出された前記基準値が設定された撮像センサ。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013133672 | 2013-06-26 | ||
| JP2013133672 | 2013-06-26 | ||
| PCT/JP2014/003027 WO2014208018A1 (ja) | 2013-06-26 | 2014-06-06 | 測距システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2014208018A1 JPWO2014208018A1 (ja) | 2017-02-23 |
| JP6286677B2 true JP6286677B2 (ja) | 2018-03-07 |
Family
ID=52141393
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015523843A Expired - Fee Related JP6286677B2 (ja) | 2013-06-26 | 2014-06-06 | 測距システム、及び撮像センサ |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10048356B2 (ja) |
| JP (1) | JP6286677B2 (ja) |
| WO (1) | WO2014208018A1 (ja) |
Families Citing this family (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014207788A1 (ja) * | 2013-06-27 | 2014-12-31 | パナソニックIpマネジメント株式会社 | 固体撮像素子及び測距撮像装置 |
| CN107615093B (zh) * | 2015-05-28 | 2021-07-06 | 新唐科技日本株式会社 | 测距摄像装置、其测距方法以及固体摄像装置 |
| GB2539909A (en) | 2015-06-30 | 2017-01-04 | Airbus Operations Ltd | Aircraft fuel measurement |
| EP3330739A4 (en) * | 2015-07-31 | 2018-08-15 | Panasonic Intellectual Property Management Co., Ltd. | Range imaging device and solid-state imaging device |
| CN108780151B (zh) * | 2016-02-08 | 2022-11-01 | 埃斯普罗光电股份公司 | 飞行时间距离测量装置及用于检测多路径误差的方法 |
| US20180189977A1 (en) * | 2016-12-30 | 2018-07-05 | Analog Devices Global | Light detector calibrating a time-of-flight optical system |
| US11585898B2 (en) | 2017-01-13 | 2023-02-21 | Sony Group Corporation | Signal processing device, signal processing method, and program |
| JP6950276B2 (ja) * | 2017-05-19 | 2021-10-13 | 株式会社デンソーウェーブ | 距離測定装置 |
| JP6637936B2 (ja) * | 2017-09-14 | 2020-01-29 | 株式会社Subaru | 車両の路面判定装置 |
| WO2019230306A1 (ja) * | 2018-05-30 | 2019-12-05 | パナソニックIpマネジメント株式会社 | 識別装置および識別方法 |
| EP3811113A1 (en) * | 2018-06-22 | 2021-04-28 | Ams Ag | Using time-of-flight and pseudo-random bit sequences to measure distance to object |
| CN112689777B (zh) * | 2018-09-11 | 2024-02-06 | 新唐科技日本株式会社 | 测距摄像装置及固体摄像元件 |
| CN111025310A (zh) * | 2018-10-09 | 2020-04-17 | 光宝电子(广州)有限公司 | 误差校正系统及其方法 |
| CN111090085B (zh) * | 2018-10-24 | 2022-04-12 | 光宝电子(广州)有限公司 | 基于飞行时间测距的校正系统及其方法 |
| US11506763B2 (en) * | 2018-10-31 | 2022-11-22 | Infineon Technologies Ag | Image sensor with interleaved hold for single-readout depth measurement |
| CN111372005B (zh) * | 2018-12-25 | 2023-03-24 | 浙江舜宇智能光学技术有限公司 | Tof摄像模组自动曝光补偿方法及其系统 |
| KR102196035B1 (ko) * | 2018-12-26 | 2020-12-29 | (주)미래컴퍼니 | 펄스 위상 이동을 이용한 3차원 거리측정 카메라의 비선형 거리 오차 보정 방법 |
| US11555899B2 (en) * | 2019-02-19 | 2023-01-17 | Infineon Technologies Ag | Random hardware fault and degradation protection apparatus for time-of-flight receiver |
| US11448739B2 (en) * | 2019-03-08 | 2022-09-20 | Synaptics Incorporated | Derivation of depth information from time-of-flight (TOF) sensor data |
| WO2020218283A1 (ja) * | 2019-04-22 | 2020-10-29 | 株式会社小糸製作所 | ToFカメラ、車両用灯具、自動車 |
| JP7240947B2 (ja) | 2019-05-09 | 2023-03-16 | 株式会社アドバンテスト | 光学試験用装置 |
| JP7417859B2 (ja) * | 2020-03-19 | 2024-01-19 | 株式会社リコー | 距離補正情報の算出方法、測距装置、移動体及びステレオカメラ装置 |
| CN116097061B (zh) * | 2020-09-16 | 2025-09-16 | 索尼半导体解决方案公司 | 距离测量装置及校准方法 |
| JP7739709B2 (ja) * | 2020-12-24 | 2025-09-17 | Toppanホールディングス株式会社 | 距離画像撮像装置、及び距離画像撮像方法 |
| EP4063904B1 (en) * | 2021-03-22 | 2025-07-09 | Ricoh Company, Ltd. | Distance measurement apparatus and distance measurement method |
| JP7732288B2 (ja) * | 2021-09-06 | 2025-09-02 | Toppanホールディングス株式会社 | 距離画像撮像装置及び距離画像撮像方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5889490A (en) * | 1996-08-05 | 1999-03-30 | Wachter; Eric A. | Method and apparatus for improved ranging |
| JP4161910B2 (ja) * | 2004-01-28 | 2008-10-08 | 株式会社デンソー | 距離画像データ生成装置及び生成方法,プログラム |
| JP2008241695A (ja) | 2007-02-27 | 2008-10-09 | Fujifilm Corp | 測距装置及び測距方法 |
| JP2009014481A (ja) * | 2007-07-04 | 2009-01-22 | Ihi Corp | 距離計測装置とそのキャリブレーション方法 |
| JP5723096B2 (ja) * | 2009-12-24 | 2015-05-27 | 日本信号株式会社 | 距離画像処理システム |
| JP5675468B2 (ja) | 2011-03-31 | 2015-02-25 | 本田技研工業株式会社 | 測距システム |
-
2014
- 2014-06-06 JP JP2015523843A patent/JP6286677B2/ja not_active Expired - Fee Related
- 2014-06-06 WO PCT/JP2014/003027 patent/WO2014208018A1/ja not_active Ceased
-
2015
- 2015-12-10 US US14/965,520 patent/US10048356B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US10048356B2 (en) | 2018-08-14 |
| JPWO2014208018A1 (ja) | 2017-02-23 |
| US20160097844A1 (en) | 2016-04-07 |
| WO2014208018A1 (ja) | 2014-12-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6286677B2 (ja) | 測距システム、及び撮像センサ | |
| US10686994B2 (en) | Imaging device, and solid-state imaging element used for same | |
| US10422859B2 (en) | Distance measuring device and solid-state image sensor | |
| EP3715907B1 (en) | Methods and apparatuses for compensating light reflections from a cover of a time-of-flight camera | |
| JP7094937B2 (ja) | 飛行時間型深度画像化システムの内蔵較正 | |
| EP2395370A1 (en) | Time-of-flight imager | |
| WO2016189808A1 (ja) | 測距撮像装置、その測距方法及び固体撮像装置 | |
| JP2019529931A5 (ja) | ||
| WO2017085916A1 (ja) | 撮像装置、及びそれに用いられる固体撮像素子 | |
| WO2014097539A1 (ja) | 3次元測定装置および3次元測定方法 | |
| CN110456370B (zh) | 飞行时间传感系统及其测距方法 | |
| KR20160092137A (ko) | 티오에프 방식의 거리 측정 장치에서 제어 방법 | |
| JP2019215260A (ja) | 精度情報を出力する測距装置 | |
| CN111352120B (zh) | 飞行时间测距系统及其测距方法 | |
| CN102292652B (zh) | 光波距离测定方法和光波距离测定装置 | |
| EP3943977A1 (en) | Apparatus comprising a time-of-flight sensor and method for characterizing a time-of-flight sensor | |
| WO2019026589A1 (ja) | 測距制御装置および測距システム | |
| US20240319348A1 (en) | Time-of-flight camera system | |
| JP6693757B2 (ja) | 距離画像生成装置および方法 | |
| JP2021012136A (ja) | 3次元情報取得装置及び3次元情報取得方法 | |
| JP7525369B2 (ja) | 測距装置 | |
| WO2020218283A1 (ja) | ToFカメラ、車両用灯具、自動車 | |
| US20240319369A1 (en) | Time-of-flight camera system | |
| JP7831237B2 (ja) | 3次元形状計測装置および3次元形状計測方法 | |
| US20220050207A1 (en) | Light projecting device, tof sensor provided with same and distance image generator |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170214 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171031 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171215 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171226 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180108 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6286677 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| SZ03 | Written request for cancellation of trust registration |
Free format text: JAPANESE INTERMEDIATE CODE: R313Z03 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |