JP6322023B2 - 計測装置、及びそれを用いた故障診断装置 - Google Patents
計測装置、及びそれを用いた故障診断装置 Download PDFInfo
- Publication number
- JP6322023B2 JP6322023B2 JP2014069709A JP2014069709A JP6322023B2 JP 6322023 B2 JP6322023 B2 JP 6322023B2 JP 2014069709 A JP2014069709 A JP 2014069709A JP 2014069709 A JP2014069709 A JP 2014069709A JP 6322023 B2 JP6322023 B2 JP 6322023B2
- Authority
- JP
- Japan
- Prior art keywords
- yaw rate
- physical quantity
- lane
- calibration
- error
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
Description
Y_LINE_L=A_L・Z2+B_L・Z+C_L…(1)
Y_LINE_R=A_R・Z2+B_R・Z+C_R…(2)
の各係数A_L,B_L,C_L,A_R,B_R,C_Rを求め、これにより左右の車線区画線モデルを求める。尚、ここで、A_L、A_Rは車線曲率に関するパラメータであり、左側車線区画線の曲率κは、κ=2・A_L、右側の車線区画線の曲率κは、κ=2・A_Rである。又、B_L,B_Rは自車両Mの中央を通る仮想線に対する自車両Mの傾き(ヨー角)に関する角度パラメータである。更に、C_L,C_Rは左右車線区画線からの横位置を示す係数である。
θyaw=(B_L+B_R)/2…(3)
から求める。
Y=(C_L+C_R)/2…(4)
から求める。
L=((C_L−C_R)−TR)/2−Y…(5)
から算出する。ここで、TRは車両のトレッドであり、本実施形態では、タイヤの外側端位置を車線逸脱判定の基準に用いるものとする。
Tttlc=L/(V・sin(θyaw))…(6)
から求める。
γ*=−θyaw/Tttlc…(7)
から求める。
γlane=κ・V+dθyaw/dt…(8)
から求める。
γcal←(1/a)・γsensor−b…(9)
から求めて、ステップS14へ進む。尚、この場合、スケールファクタ誤差を(1/a)と定義し、オフセット誤差を(−b)と定義し、
a‘=(1/a)
b‘=(−b)
とすれば、(9)式は、
γcal←a‘・γsensor+b’…(9‘)
となる。
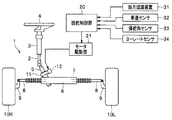
32…車速センサ、
33…操舵角センサ、
34…ヨーレートセンサ、
41…目標ヨーレート演算部、
43…推定ヨーレート演算部、
44…較正ヨーレート演算部、
a…スケールファクタ誤差、
b…オフセット誤差、
γcal…較正ヨーレート、
dγlane/dt…推定ヨー角加速度、
M…自車両、
n…サンプルデータ数、
V…車速、
γ…ヨーレート、
γ*…目標ヨーレート、
Mz*…目標ヨーモーメント、
γcal…較正ヨーレート、
γlane…車線推定ヨーレート、
γsensor…センサヨーレート、
θyaw…対車線ヨー角
Claims (5)
- 第1物理量を計測する物理量計測手段と、
前記第1物理量を推定する第2物理量を設定する、前記物理量計測手段とは別の物理量推定手段と、
前記第1物理量と前記第2物理量とを座標軸として座標データを取得する座標データ取得手段と、
取得した前記座標データに基づき最小二乗法により線形回帰パラメータを求めるパラメータ演算手段と、
前記線形回帰パラメータの傾きと切片とをスケールファクタ誤差とオフセット誤差として同定するパラメータ同定手段と、
前記スケールファクタ誤差と前記オフセット誤差とに基づいて前記物理量計測手段で計測した前記第1物理量を較正して較正物理量を求める物理量較正手段と
を備える計測装置において、
走行車線を規定する車線区画線を検出する車線区画線演算手段と、
前記車線区画線演算手段で検出した前記車線区画線に基づいて該車線区画線の曲率及び車両と該車線区画線とのなす角度を求める対車線ヨー角演算手段と
を更に有し、
前記物理量計測手段が前記第1物理量である前記車両のヨーレートを検出するヨーレートセンサであり、
前記物理量推定手段が前記対車線ヨー角演算手段で求めた前記曲率及び前記車両と前記車線区画線とのなす角から前記第2物理量である該車両の推定ヨーレートを求める推定ヨーレート演算部であり、
前記座標データ取得手段は、前記ヨーレートセンサにて検出した前記ヨーレートと前記推定ヨーレート演算部で求めた前記推定ヨーレートとを座標軸として前記座標データを取得する
ことを特徴とする計測装置。 - 前記物理量較正手段は、前記ヨーレートを前記スケールファクタ誤差で除算した値に前記オフセット誤差を減算することで前記較正物理量である較正ヨーレートを求める
ことを特徴とする請求項1記載の計測装置。 - 前記物理量較正手段は、前記ヨーレートを前記スケールファクタ誤差で乗算した値に前記オフセット誤差を加算することで前記較正物理量である較正ヨーレートを求める
ことを特徴とする請求項1記載の計測装置。 - 前記スケールファクタ誤差と前記オフセット誤差を、前記ヨーレートセンサで検出した前記ヨーレートを較正する線形回帰パラメータとする
ことを特徴とする請求項1〜3の何れか1項に記載の計測装置。 - 前記スケールファクタ誤差及び前記オフセット誤差を予め設定した故障判定用しきい値と比較し、少なくとも一方の誤差が該故障判定用しきい値を越えている場合、前記ヨーレートセンサの故障と判定する故障診断手段を備える
ことを特徴とする請求項1〜4の何れか1項に記載の計測装置を用いた故障診断装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014069709A JP6322023B2 (ja) | 2014-03-28 | 2014-03-28 | 計測装置、及びそれを用いた故障診断装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014069709A JP6322023B2 (ja) | 2014-03-28 | 2014-03-28 | 計測装置、及びそれを用いた故障診断装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017209626A Division JP6387172B2 (ja) | 2017-10-30 | 2017-10-30 | ステアリング装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015190920A JP2015190920A (ja) | 2015-11-02 |
| JP6322023B2 true JP6322023B2 (ja) | 2018-05-09 |
Family
ID=54425506
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014069709A Active JP6322023B2 (ja) | 2014-03-28 | 2014-03-28 | 計測装置、及びそれを用いた故障診断装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6322023B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017168586A1 (ja) | 2016-03-29 | 2017-10-05 | パイオニア株式会社 | 算出装置、制御方法、プログラム及び記憶媒体 |
| JP6481660B2 (ja) * | 2016-06-09 | 2019-03-13 | トヨタ自動車株式会社 | 車両用挙動制御装置 |
| US10843728B2 (en) * | 2019-01-31 | 2020-11-24 | StradVision, Inc. | Method and device for delivering steering intention of autonomous driving module or driver to steering apparatus of subject vehicle more accurately |
| JP2020006951A (ja) * | 2019-10-17 | 2020-01-16 | パイオニア株式会社 | 算出装置、制御方法、プログラム及び記憶媒体 |
| DE102023135868A1 (de) * | 2023-12-19 | 2025-06-26 | Endress+Hauser Flowtec Ag | Verfahren zum Abgleich eines Messgeräts gegen ein Referenzmessgerät, Verfahren zum Erzeugen von Zusatzinformation zu einem Messgerät, und mit dem Verfahren abgleichbares Messgerät |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000055932A (ja) * | 1998-08-03 | 2000-02-25 | Mazda Motor Corp | 車両用走行状態検出センサの異常検出装置 |
| JP3637801B2 (ja) * | 1999-03-15 | 2005-04-13 | トヨタ自動車株式会社 | 車輌の操舵制御装置 |
| JP2008032632A (ja) * | 2006-07-31 | 2008-02-14 | Denso Corp | 角速度センサのキャリブレーション装置および角速度値特定装置 |
| JP5561469B2 (ja) * | 2010-02-18 | 2014-07-30 | トヨタ自動車株式会社 | ヨーレート補正装置、及びその方法 |
| JP5314649B2 (ja) * | 2010-09-15 | 2013-10-16 | 本田技研工業株式会社 | ヨーレート較正装置 |
-
2014
- 2014-03-28 JP JP2014069709A patent/JP6322023B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015190920A (ja) | 2015-11-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6486045B2 (ja) | 車載カメラのオンライン較正のためのシステム、車両及び方法 | |
| JP4291741B2 (ja) | 車線逸脱警報装置 | |
| US7447578B2 (en) | Steering control apparatus and method for automotive vehicle | |
| US9610976B2 (en) | Lane departure prevention control system for vehicle | |
| US11721109B2 (en) | Apparatus and method for compensating for heading angle | |
| US10286946B2 (en) | Steering control system | |
| JP6910973B2 (ja) | 車両制御装置及びその制御方法並びに車両制御システム | |
| JP6322023B2 (ja) | 計測装置、及びそれを用いた故障診断装置 | |
| US10782129B2 (en) | Method and system for ascertaining and providing a ground profile | |
| US11225284B2 (en) | Method and device for estimating a steering torque | |
| US20170088168A1 (en) | Vehicle steering control apparatus | |
| US9637170B2 (en) | Steering torque compensating apparatus and steering torque compensating method | |
| JP6327701B2 (ja) | 車両の車線逸脱防止制御装置 | |
| JPH10206175A (ja) | 道路曲率推定装置 | |
| JP6348285B2 (ja) | 操舵制御装置 | |
| CN111645679A (zh) | 用于车辆的侧面碰撞风险估计系统 | |
| KR20140104611A (ko) | 차량의 자동 주차 장치 및 이를 이용한 방법 | |
| US9892519B2 (en) | Method for detecting an object in an environmental region of a motor vehicle, driver assistance system and motor vehicle | |
| JP6478318B2 (ja) | 車両運動パラメータ推定装置 | |
| KR20240030846A (ko) | 차량 포즈를 추정하는 방법 및 장치 | |
| JP2017061265A (ja) | 車両の走行制御装置 | |
| GB2543251A (en) | Calibrating an automated guided vehicle | |
| JP6387172B2 (ja) | ステアリング装置 | |
| WO2006121221A1 (ja) | 車線追従制御装置および車線追従制御方法 | |
| JP6317972B2 (ja) | 車両の車線逸脱防止制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161212 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170825 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170905 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171030 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180313 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180406 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6322023 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |