JP6323064B2 - 走行車線識別装置、車線変更支援装置、走行車線識別方法 - Google Patents
走行車線識別装置、車線変更支援装置、走行車線識別方法 Download PDFInfo
- Publication number
- JP6323064B2 JP6323064B2 JP2014035006A JP2014035006A JP6323064B2 JP 6323064 B2 JP6323064 B2 JP 6323064B2 JP 2014035006 A JP2014035006 A JP 2014035006A JP 2014035006 A JP2014035006 A JP 2014035006A JP 6323064 B2 JP6323064 B2 JP 6323064B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- lane
- traveling
- unit
- host
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Landscapes
- Traffic Control Systems (AREA)
Description
本発明の課題は、周囲の視認性が低下しているような状況においても、他車両の走行車線を識別することである。
《第1実施形態》
《構成》
本実施形態は、運転者が車線変更を意図して方向指示器を操作したときに、自車両が指示方向へと車線変更できるか否かを判定し、その判定結果を運転者に報知することで、車線変更を支援するものである。また、自車両が指示方向へと車線変更できるか否かを判定するために、自車両周囲の他車両が、どの走行車線を走行しているかを識別するものである。なお、運転者が運転している場合に限らず、人為的な運転操作がなくとも、車両に搭載されたレーダやカメラ等で周囲の環境を認識し、車両の走行システムが主体となって自律的に走行(自動走行)できるものにも適応できる。
車線変更支援装置11の構成を、図1に基づいて説明する。
本実施形態の車線変更支援装置11は、地図情報取得部12と、レーダ部13と、操作検出部14と、車輪速センサ31と、コントローラ15と、報知部16と、を備える。
地図情報取得部12は、自車両の現在位置の道路地図を取得する。ここでは、例えばナビゲーションシステムとする。
ミリ波レーダは、電磁波のうち、波長1〜10mm、周波数30〜300GHzのミリ波を用いるレーダである。距離及び相対速度については、例えばFM‐CW(Frequency Modulation-Continuous Wave)方式を利用し、ドップラ効果による周波数差に応じて距離及び相対速度を検出する。方位については、例えばDBF(Digital Beam Forming)方式を利用し、複数のチャンネルで受信した反射波の位相差に応じて方位を検出する。
なお、4つのレーダ部13を区別する際には、車体のフロントに設けたレーダ部をフロントレーダ部13Fとし、車体のリアに設けたレーダ部をリアレーダ部13Rとし、車体の左サイドに設けたレーダ部を左サイドレーダ部13SLとし、車体の右サイドに設けたレーダ部を右サイドレーダ部13SRとする。
フロントレーダ部13Fは、例えばフロントグリルに設けられ、主に車体前方に存在する前方物体までの距離、相対速度、及び方位を検出する。リアレーダ部13Rは、例えばリアバンパに設けられ、主に車体後方に存在する後方物体までの距離、相対速度、及び方位を検出する。左サイドレーダ部13SLは、左側の例えばリアフェンダに設けられ、主に車体左方に存在する側方物体までの距離、相対速度、及び方位を検出する。右サイドレーダ部13SRは、右側の例えばリアフェンダに設けられ、主に車体右方に存在する側方物体までの距離、相対速度、及び方位を検出する。検出角度は、水平方向に例えば150度程度であり、検出距離は例えば100m程度である。
走行車線識別部22は、予め定めた平面座標で、自車両の現在位置を基準に、道路地図取得部12で取得した道路地図、及びレーダ部13で検出した他車両の相対位置を重畳することにより、他車両の走行車線を識別する。
車線変更可否判定部23は、操作検出部14により運転者の方向指示操作を検出したときに、走行車線識別部22の識別結果に応じて、自車両が運転者の指示方向へと車線変更できるか否かを判定する。
なお、地図情報取得部12、レーダ部13、及び走行車線識別部22が、走行車線識別装置17に対応する。
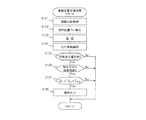
先ずステップS101では、地図情報取得部12により、自車両Voの現在位置{xo,yo}の道路地図を取得する。
自車両Voの現在位置{xo,yo}の道路地図を、図4に基づいて説明する。
先ず、予め定めたXY座標における自車両Voの現在位置Po{xo,yo}を検出すると共に、自車両Voの進行方向φoを検出する。進行方向φoは、例えば自車両Voの1周期前の位置Po(n−1){xo(n−1),yo(n−1)}と比較した現在位置Po(n){xo(n),yo(n)}から演算される。そして、記憶された道路地図情報を参照し、自車両Voの現在位置Po{xo,yo}の道路地図を取得する。このとき、車線数、車線幅、道路線形(曲率)等に応じて、各走行車線の車線中心線LAを検出する。ここでは、片側二車線となる道路とし、左の走行車線をLA1、右の走行車線をLA2とし、走行車線LA1の車線中心線をLN1、走行車線LA2の車線中心線をLN2としている。
他車両Vaの相対位置Paを、図5に基づいて説明する。
自車両Voを基準とする相対位置Paは、他車両Vaにおける正面(前端)の車幅方向中心点を{xa,ya}として検出される。ここでは、自車両Voよりも後方に、三台の他車両Vaを検出しており、自車両Voに近い他車両から順に、Va1、Va2、Va3としている。他車両Va1の相対位置Pa1は{xa1、ya1}で表され、他車両Va2の相対位置Pa2は{xa2、ya2}で表され、他車両Va3の相対位置Pa3は{xa3、ya3}で表される。
道路地図と他車両の相対位置との重畳を、図6に基づいて説明する。
ここでは、自車両Voの現在位置{xo,yo}を基準に、各走行車線LAの車線中心線LN、及び他車両Vaの相対位置Paを重畳させる。
続くステップS104では、各走行車線LAの車線中心線LNに対する他車両Vaの横位置が最小となる走行車線を、他車両Vaの走行車線LAとして識別する。
車線中心線LNに対する横位置とは、他車両Vaの車幅方向中心点から、他車両Vaに最も近い車線中心線LNまでの車幅方向の距離Dyである。そして、車線中心線LNに対する他車両Vaの横位置(距離Dy)が最小となる車線中心線LNを選び、その車線中心線LNに対応する走行車線LAを選ぶ。
これにより、図6では、他車両Va1の横位置(距離Dy)は、車線中心線LN2に対して最小となるので、この車線中心線LN2に対応した走行車線LA2を走行していると識別できる。また、他車両Va2の横位置(距離Dy)は、車線中心線LN1に対して最小となるので、この車線中心線LN1に対応した走行車線LA1を走行していると識別できる。また、他車両Va3の横位置(距離Dy)は、車線中心線LN2に対して最小となるので、この車線中心線LN2に対応した走行車線LA2を走行していると識別できる。
ステップS106では、運転者が車線変更しようとしている走行車線は、他車両Vaが走行する走行車線であるか否かを判定する。すなわち、指示方向の隣接車線に他車両Vaが走行しているか否かを判定する。ここで、指示方向の隣接車線に他車両Vaが存在しないときには、車線変更可能であると判断して、そのまま所定のメインプログラムに復帰する。一方、指示方向の隣接車線に他車両Vaが存在するときは、自車両Voの車線変更によって他車両Vaへ影響を及ぼす可能性があると判断してステップS107に移行する。他車両Vaへの影響とは、自車両Voの接近によって、他車両Vaに不必要な減速や操舵を強いるような事態を指す。
Dx<V×TTHW
ここで、判定結果がDx≧V×TTHWであるときには、他車両Vaへの影響はないと判断して、そのまま所定のメインプログラムに復帰する。一方、判定結果がDx<V×TTHWであるときには、他車両Vaへの影響が発生し得ると判断してステップS108に移行する。
上記が車線変更支援処理である。
次に、第1実施形態の作用について説明する。
運転者が車線変更を意図して方向指示器を操作したときに、自車両が指示方向へと車線変更できるか否かを的確に判定するには、自車両Voよりも後方を走行している他車両Vaの走行車線LAを識別する必要がある。そこで、カメラ画像により、他車両Va及び通行区分線(白線)を検出し、他車両Vaの走行車線LAを識別することが考えられるが、例えば夜間や悪天候時のように、周囲の視認性が低下しているような状況では、その識別精度が低下してしまう。
このように、レーダ部13で他車両Vaを検出し、自車両Voを基準に道路地図及び他車両の相対位置Paを重畳したものを、他車両Vaの走行車線LAを識別するための指標としている。したがって、周囲の視認性が低下しているような状況でも、他車両Vaの走行車線LAを識別することができる。
一方、指示方向の隣接車線に他車両Vaが存在する場合は、自車両Voと他車両Vaとの接近度合に注目する。そして、自車両Voと他車両Vaとの車間距離Dxが目標車間距離(V×TTHW)以上であるときには(ステップS107の判定が“No”)、自車両Voが車線変更しても他車両Vaへの影響はないと判定する。
本実施形態では、地図情報取得部12、ステップS101の処理が「道路地図取得部」に対応する。レーダ部13、ステップS102の処理が「レーダ部」に対応する。走行車線識別部22、ステップS103、S104の処理が「走行車線識別部」に対応する。操作検出部14、ステップS105の処理が「操作検出部」に対応する。車線変更可否判定部23、ステップS106、S107の処理が「車線変更可否判定部」に対応する。報知部16、ステップS108の処理が「報知部」に対応する。
次に、第1実施形態における主要部の効果を記す。
(1)本実施形態に係る走行車線識別装置は、地図情報取得部12が自車両Voの現在位置Poの道路地図を取得し、レーダ部13による照射波の出力及び反射波の入力によって、自車両Voの周囲を走行している他車両Vaの相対位置Paを検出する。そして、予め定めたXY座標で、自車両Voの現在位置Poを基準に、道路地図、及び他車両Vaの相対位置Paを重畳することにより、他車両Vaの走行車線LAを識別する。
このように、レーダ部13で他車両Vaを検出し、予め定めたXY座標で、自車両Voを基準に道路地図及び他車両の相対位置Paを重畳したものを、他車両Vaの走行車線LAを識別するための指標としている。したがって、周囲の視認性が低下しているような状況でも、他車両Vaの走行車線LAを識別することができる。
このように、車線中心線LNに対する横位置(距離Dy)が最小となる走行車線LAを検出するだけでよいので、他車両Vaの走行車線LAを容易に、且つ的確に識別することができる。
このように、他車両Vaの走行車線LAに応じて、運転者の指示方向へと車線変更できるか否かを判定し、それを運転者に報知することで、車線変更によって他車両Vaに不必要に接近するリスクを低減することができる。
このように、指示方向の隣接車線に他車両Vaが存在するか否かに応じて、車線変更の可否を判定することにより、運転者の指示方向へと車線変更できるか否かを容易に、且つ的確に判定することができる。
このように、他車両Vaの走行車線LAだけではなく、他車両Vaとの相対的な位置関係に応じて、車線変更の可否を判定することにより、運転者の指示方向へと車線変更できるか否かを容易に、且つ的確に判定することができる。
このように、レーダ部13で他車両Vaを検出し、予め定めたXY座標で、自車両Voを基準に道路地図及び他車両の相対位置Paを重畳したものを、他車両Vaの走行車線LAを識別するための指標としている。したがって、周囲の視認性が低下しているような状況でも、他車両Vaの走行車線LAを識別することができる。
《構成》
本実施形態は、自車両よりも後方を走行している複数の他車両Vaが存在するときに、各他車両Vaの走行車線LAを、高精度に識別するものである。
装置構成は、前述した第1実施形態と同じである。
走行車線識別部22で実行する走行車線識別処理を、図8のフローチャートに基づいて説明する。
ステップS202では、後方車群Vgのうち、一台の他車両Vaを基準車両Vsとして選出する。
ここでは、三台の他車両Vaを検出しており、自車両Voに近い側から順に、他車両Va1、Va2、Va3とする。これら三台の他車両Vaが後方車群Vgである。XY座標上で、基準車両Vsを選出する領域Asは、後方車群Vgのうち、自車両Voに対して最も遠い他車両Va3の位置から、予め定めた距離Dsだけ自車両Voに近い範囲とする。予め定めた距離Dsは、例えば下記式によって求める。ここで、Dx3は自車両Voから最も遠い他車両Va3までの距離である。また、Wは車線幅であり、例えば3.5[m]程度である。また、αは車体幅であり、例えば1.8[m]程度である。
Ds=Dx3×{1−W/(W+α)}
ここでは、領域Asに他車両Va2及び他車両Va3が含まれるため、どちらを選んでもよいが、例えば他車両Va3を基準車両Vsとして選ぶ。
評価車両Veの選出を、図10に基づいて説明する。
XY座標上で、評価車両Veを選出する領域Aeは、後方車群Vgのうち、基準車両Vs(=Va3)よりも予め定めた距離De以上、自車両Voに近い側とする。予め定めた距離Deとは、例えば10[m]程度である。ここでは、領域Aeに他車両Va1だけしか含まれないため、他車両Va1を評価車両Veとして選ぶ。
続くステップS204では、XY座標上で、基準車両Vs(=Va3)が各走行車線LAの車線中心線LN上に配置されるように、後方車群Vgを、自車両Voを中心に回転移動させる。
ここでは、ここでは、片側三車線となる道路とし、左の走行車線をLA1、中央の走行車線をLA2とし、右の走行車線をLA3としている。また、走行車線LA1の車線中心線をLN1、走行車線LA2の車線中心線をLN2、走行車線LA3の車線中心線をLN3としている。
そして、図11では、基準車両Vs(=Va3)を、左の走行車線をLA1の車線中心線をLN1上に配置されるように、後方車群Vgを、自車両Voを中心に回転移動させている。また、図12では、基準車両Vs(=Va3)を、中央の走行車線をLA2の車線中心線をLN2上に配置されるように、後方車群Vgを、自車両Voを中心に回転移動させている。また、図13では、基準車両Vs(=Va3)を、右の走行車線をLA3の車線中心線をLN3上に配置されるように、後方車群Vgを、自車両Voを中心に回転移動させている。
先ず、後方車群Vgを回転移動させたときの各状態で、評価車両Ve(=Va1)に最も近い車線中心線LNを選び、その車線中心線LNに対する評価車両Ve(=Va1)の横位置を検出する。この横位置とは、評価車両Ve(=Va1)の車幅方向中心点から、車線中心線LN2までの直交方向の距離Dyである。
先ず、図11では、評価車両Ve(=Va1)は、車線中心線LN1〜LN3のうち、LN2に最も近くなるので、この車線中心線LN2に対する評価車両Ve(=Va1)の横位置(距離Dy)を検出する。また、図12では、評価車両Ve(=Va1)は、車線中心線LN1〜LN3のうち、LN2に最も近くなるので、この車線中心線LN2に対する評価車両Ve(=Va1)の横位置(距離Dy)を検出する。また、図13では、評価車両Ve(=Va1)は、車線中心線LN1〜LN3のうち、LN3に最も近くなるので、この車線中心線LN3に対する評価車両Ve(=Va1)の横位置(距離Dy)を検出する。
こうして、各他車両Va1〜Va3の走行車線LAを識別してから、所定のメインプログラムに復帰する。
上記が走行車線識別処理である。
次に、第2実施形態の作用について説明する。
自車両Voよりも後方を走行している複数の他車両Vaが存在する場合は、これを後方車群Vgとしてグループ化して、総合的に走行車線LAを識別すると、より識別精度を向上させることができる。先ず、後方車群Vgのうち、一台の他車両Vaを基準車両Vsとして選出し(ステップS202)、且つ基準車両Vsよりも自車両Voに近い位置にいる一台の他車両Vaを評価車両Veとして選出する(ステップS203)。そして、平面座標で、基準車両Vsが各走行車線LAの車線中心線LN上に配置されるように、後方車群Vgを、自車両Voを中心に回転移動させる(ステップS204)。
このように、自車両Voよりも後方を走行している複数の他車両Vaが存在する場合、これを後方車群Vgとしてグループ化して、総合的に走行車線LAを識別することで、より識別精度を向上させることができる。
また、基準車両Vsよりも予め定めた距離De以上、自車両Voに近い側で、評価車両Veを選出する。このように、自車両Voに近い側の他車両Vaを用い、回転移動の妥当性を評価することで、各他車両Vaの走行車線LAを、高精度に識別することができる。
本実施形態において、前述した第1実施形態と共通する他の部分については、同様の作用効果が得られるものとし、詳細な説明は省略する。
本実施形態では、単に基準車両Vsよりも予め定めた距離De以上、自車両Voに近い側で、評価車両Veを選出しているが、さらに条件を加えてもよい。例えば、自車両Voに対する相対的な横位置が、予め定めた範囲内の他車両Vaを選出する。このように、条件を追加することにより、他車両Vaが多数存在するような状況で、演算負担を軽減することができる。
本実施形態では、ステップS202の処理が「基準車両選出部」に対応する。また、ステップS203の処理が「評価車両選出部」に対応する。また、ステップS204の処理が「座標変換部」に対応する。また、ステップS205、S104の処理が「走行車線識別部」に対応する。
次に、第2実施形態における主要部の効果を記す。
(1)本実施形態に係る走行車線識別装置は、自車両Voよりも後方を走行している複数の他車両Vaを後方車群Vgとする。そして、後方車群Vgのうち、一台の他車両Vaを基準車両Vsとして選出し、基準車両Vsよりも自車両Voに近い位置にいる一台の他車両Vaを評価車両Veとして選出する。そして、平面座標で、基準車両Vsが各走行車線LAの車線中心線LN上に配置されるように、後方車群Vgを、自車両Voを中心に回転移動させる。そして、後方車群Vgの回転移動により、車線中心線LNに対する評価車両Veの横位置が最小となるときの回転移動位置を選ぶ。そして、その回転移動位置で、他車両Vaごとに、各走行車線LAの車線中心線LNに対する横位置(距離Dy)が最小となる走行車線LAを、他車両Vaの走行車線LAとして識別する。
このように、自車両Voよりも後方を走行している複数の他車両Vaが存在する場合、これを後方車群Vgとしてグループ化して、総合的に走行車線LAを識別することで、より識別精度を向上させることができる。
このように、自車両Voから遠方の他車両Vaを基準にすることで、各他車両Vaの走行車線LAを、高精度に識別することができる。
このように、自車両Voに近い側の他車両Vaを用い、回転移動の妥当性を評価することで、各他車両Vaの走行車線LAを、高精度に識別することができる。
12 走行状態検出部
13 レーダ部
14 操作検出部
15 コントローラ
16 報知部
17 走行車線識別装置
22 走行車線識別部
23 進路変更可否判定部
31 車輪速センサ
Claims (8)
- 自車両の現在位置の道路地図を取得する道路地図取得部と、
照射波の出力及び反射波の入力により、自車両の周囲を走行している他車両の相対位置を検出するレーダ部と、
予め定めた平面座標で、自車両の現在位置を基準に、前記道路地図取得部で取得した道路地図、及び前記レーダ部で検出した他車両の相対位置を重畳することにより、前記他車両の走行車線を識別する走行車線識別部と、を備え、
前記走行車線識別部は、
自車両よりも後方を走行している複数の前記他車両を後方車群とし、前記後方車群のうち、一台の他車両を基準車両として選出する基準車両選出部と、
前記後方車群のうち、前記基準車両よりも自車両に近い位置にいる一台の他車両を評価車両として選出する評価車両選出部と、
前記平面座標で、前記基準車両が各走行車線の車線中心線上に配置されるように、前記後方車群を、自車両を中心に回転移動させる座標変換部と、を備え、
前記座標変換部による前記後方車群の回転移動により、前記車線中心線に対する前記評価車両の横位置が最小となるときの回転移動位置で、前記他車両ごとに、各走行車線の車線中心線に対する横位置が最小となる走行車線を、前記他車両の走行車線として識別することを特徴とする走行車線識別装置。 - 前記走行車線識別部は、
各走行車線の車線中心線に対する前記他車両の横位置が最小となる走行車線を、前記他車両の走行車線として識別することを特徴とする請求項1に記載の走行車線識別装置。 - 前記基準車両選出部は、
前記後方車群のうち、自車両に対して最も遠い他車両の位置から、予め定めた距離だけ自車両に近い範囲内で、前記基準車両を選出することを特徴とする請求項1又は2に記載の走行車線識別装置。 - 前記評価車両選出部は、
前記基準車両よりも予め定めた距離以上、自車両に近い側で、前記評価車両を選出することを特徴とする請求項1〜3の何れか一項に記載の走行車線識別装置。 - 請求項1〜4の何れか一項に記載の走行車線識別装置と、
運転者の方向指示操作を検出する操作検出部と、
前記操作検出部が運転者の方向指示操作を検出したときに、前記走行車線識別部の識別結果に応じて、自車両が運転者の指示方向へと車線変更できるか否かを判定する車線変更可否判定部と、
前記車線変更可否判定部の判定結果を自車両の運転者に報知する報知部と、を備えることを特徴とする車線変更支援装置。 - 前記車線変更可否判定部は、
指示方向の隣接車線に前記他車両が存在するか否かを判定し、前記他車両が存在しないときには、運転者の指示方向へと車線変更できると判定することを特徴とする請求項5に記載の車線変更支援装置。 - 前記車線変更可否判定部は、
指示方向の隣接車線に前記他車両が存在するか否かを判定し、前記他車両が存在する場合、前記他車両と自車両との前後方向の車間距離が予め定めた目標車間距離以上であるときには、運転者の指示方向へと車線変更できると判定し、前記車間距離が前記目標車間距離より小さいときには、運転者の指示方向へは車線変更できないと判定することを特徴とする請求項5又は6に記載の車線変更支援装置。 - 自車両の現在位置の道路地図を取得し、レーダ部による照射波の出力及び反射波の入力によって、自車両の周囲を走行している他車両の相対位置を検出し、予め定めた平面座標で、自車両の現在位置を基準に、前記道路地図、及び前記他車両の相対位置を重畳することにより、前記他車両の走行車線を識別し、
自車両よりも後方を走行している複数の前記他車両を後方車群とし、前記後方車群のうち、一台の他車両を基準車両として選出し、前記後方車群のうち、前記基準車両よりも自車両に近い位置にいる一台の他車両を評価車両として選出し、前記平面座標で、前記基準車両が各走行車線の車線中心線上に配置されるように、前記後方車群を、自車両を中心に回転移動させ、前記後方車群の回転移動により、前記車線中心線に対する前記評価車両の横位置が最小となるときの回転移動位置で、前記他車両ごとに、各走行車線の車線中心線に対する横位置が最小となる走行車線を、前記他車両の走行車線として識別することを特徴とする走行車線識別方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014035006A JP6323064B2 (ja) | 2014-02-26 | 2014-02-26 | 走行車線識別装置、車線変更支援装置、走行車線識別方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014035006A JP6323064B2 (ja) | 2014-02-26 | 2014-02-26 | 走行車線識別装置、車線変更支援装置、走行車線識別方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015161968A JP2015161968A (ja) | 2015-09-07 |
| JP6323064B2 true JP6323064B2 (ja) | 2018-05-16 |
Family
ID=54185050
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014035006A Active JP6323064B2 (ja) | 2014-02-26 | 2014-02-26 | 走行車線識別装置、車線変更支援装置、走行車線識別方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6323064B2 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11080997B2 (en) | 2016-04-28 | 2021-08-03 | Sumitomo Electric Industries, Ltd. | Recommended traveling speed provision program, travel support system, vehicle control device, and automatic traveling vehicle |
| WO2017187882A1 (ja) | 2016-04-28 | 2017-11-02 | 住友電気工業株式会社 | 安全運転支援システム、サーバ、車両およびプログラム |
| US10510249B2 (en) | 2016-04-28 | 2019-12-17 | Sumitomo Electric Industries, Ltd. | Safety driving assistant system, vehicle, and program |
| DE102016209232B4 (de) * | 2016-05-27 | 2022-12-22 | Volkswagen Aktiengesellschaft | Verfahren, Vorrichtung und computerlesbares Speichermedium mit Instruktionen zur Bestimmung der lateralen Position eines Fahrzeuges relativ zu den Fahrstreifen einer Fahrbahn |
| CN119124135A (zh) * | 2018-04-03 | 2024-12-13 | 御眼视觉技术有限公司 | 用于导航主车辆的系统、方法 |
| JP7001541B2 (ja) * | 2018-06-04 | 2022-01-19 | 本田技研工業株式会社 | 車両制御装置、車両制御方法およびプログラム |
| EP3588006B1 (en) * | 2018-06-28 | 2021-08-11 | Continental Automotive GmbH | Determining visibility distances based a on dynamic field of view of a vehicle |
| US10935977B2 (en) * | 2018-06-28 | 2021-03-02 | Aptiv Technologies Limited | Lane assignment system |
| CN110751827B (zh) * | 2018-07-24 | 2021-03-02 | 东旭光电科技股份有限公司 | 输出提示信息的方法、装置、智能路灯及可读存储介质 |
| JP7505706B2 (ja) * | 2020-01-20 | 2024-06-25 | 株式会社中電工 | 警報システム |
| CN111882870B (zh) * | 2020-07-14 | 2022-07-01 | 吉林大学 | 道路交通环境的量化方法 |
| CN112488150B (zh) * | 2020-11-04 | 2023-04-07 | 浙江吉利控股集团有限公司 | 一种基于车路协同的目标修正方法、装置、系统及存储介质 |
| JP7435426B2 (ja) * | 2020-12-08 | 2024-02-21 | 株式会社デンソー | 車両制御装置 |
| JP7571716B2 (ja) | 2021-12-07 | 2024-10-23 | トヨタ自動車株式会社 | 物体判定装置、物体判定用コンピュータプログラム及び物体判定方法 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003215241A (ja) * | 2002-01-28 | 2003-07-30 | Matsushita Electric Works Ltd | 車載用レーダ装置 |
| JP2003296899A (ja) * | 2002-03-29 | 2003-10-17 | Toyota Central Res & Dev Lab Inc | 先行車両判定装置 |
| JP2012234373A (ja) * | 2011-05-02 | 2012-11-29 | Mitsubishi Motors Corp | 運転支援装置 |
-
2014
- 2014-02-26 JP JP2014035006A patent/JP6323064B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015161968A (ja) | 2015-09-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6323064B2 (ja) | 走行車線識別装置、車線変更支援装置、走行車線識別方法 | |
| JP6323063B2 (ja) | 走行車線識別装置、車線変更支援装置、走行車線識別方法 | |
| US7797108B2 (en) | Collision avoidance system and method of aiding rearward vehicular motion | |
| US9884585B1 (en) | Exterior vehicle alerting system | |
| RU2722807C1 (ru) | Система индикации состояния транспортного средства | |
| US11345279B2 (en) | Device and method for warning a driver of a vehicle | |
| EP3141926B1 (en) | Automated detection of hazardous drifting vehicles by vehicle sensors | |
| US8855910B2 (en) | Moving body anti-collision device and moving body with the same | |
| US20190088137A1 (en) | Vehicle control device, vehicle control method, and recording medium | |
| JP6639194B2 (ja) | 情報表示装置 | |
| JP5267570B2 (ja) | 運転支援装置 | |
| KR20200102004A (ko) | 충돌 방지 장치, 시스템 및 방법 | |
| US20190071071A1 (en) | Vehicle control device, vehicle control method, and storage medium | |
| US12589741B2 (en) | Drive assist apparatus for vehicle and drive assist system for vehicle | |
| CN106114217A (zh) | 行驶控制装置 | |
| JP6520687B2 (ja) | 運転支援装置 | |
| JP2013033324A (ja) | 周辺車両情報通知装置 | |
| JP2019028841A (ja) | 車外報知装置 | |
| JP2015121959A (ja) | 障害物検知装置 | |
| US20190031205A1 (en) | Distinguish between vehicle turn and lane change | |
| US11610488B2 (en) | Notification device and vehicle control device | |
| US12142057B2 (en) | Information recording device, information recording method, and storage medium | |
| JP2008037361A (ja) | 障害物認識装置 | |
| CN117581282A (zh) | 驾驶辅助装置 | |
| JP2019175035A (ja) | 自動運転制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161226 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171005 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171024 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171211 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180313 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180326 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6323064 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |