JP6414830B2 - 波形弁別装置、波形弁別方法及び波形弁別プログラム - Google Patents
波形弁別装置、波形弁別方法及び波形弁別プログラム Download PDFInfo
- Publication number
- JP6414830B2 JP6414830B2 JP2016504864A JP2016504864A JP6414830B2 JP 6414830 B2 JP6414830 B2 JP 6414830B2 JP 2016504864 A JP2016504864 A JP 2016504864A JP 2016504864 A JP2016504864 A JP 2016504864A JP 6414830 B2 JP6414830 B2 JP 6414830B2
- Authority
- JP
- Japan
- Prior art keywords
- waveform
- discrimination
- value
- coordinate
- circuit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01T—MEASUREMENT OF NUCLEAR OR X-RADIATION
- G01T1/00—Measuring X-radiation, gamma radiation, corpuscular radiation, or cosmic radiation
- G01T1/16—Measuring radiation intensity
- G01T1/20—Measuring radiation intensity with scintillation detectors
- G01T1/208—Circuits specially adapted for scintillation detectors, e.g. for the photo-multiplier section
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01T—MEASUREMENT OF NUCLEAR OR X-RADIATION
- G01T1/00—Measuring X-radiation, gamma radiation, corpuscular radiation, or cosmic radiation
- G01T1/16—Measuring radiation intensity
- G01T1/20—Measuring radiation intensity with scintillation detectors
- G01T1/202—Measuring radiation intensity with scintillation detectors the detector being a crystal
Landscapes
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Physics & Mathematics (AREA)
- High Energy & Nuclear Physics (AREA)
- Molecular Biology (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Chemical & Material Sciences (AREA)
- Crystallography & Structural Chemistry (AREA)
- Measurement Of Radiation (AREA)
Description
即ち、シンチレータの出力として、ガンマ線が入力されたことに起因する第1波形の光信号が任意の強度で任意のタイミングで発生して一群の光信号の集合を構成し、この一群の光信号を入力した光検出器が、第1波形に対応した第1の電気信号を逐次出力し、中性子線が入力されたことに起因する第2波形の光信号が任意の強度で任意のタイミングで発生して一群の光信号の集合を構成し、この一群の光信号を入力した光検出器が、第2波形に対応した第2の電気信号を逐次出力するような状況(環境)において、第1波形と、第1波形とは異なる第2波形を弁別したい場合がある。
この理由は、非特許文献1の図1に示される電荷感応型前置増幅器の過渡特性(スルーレート)に起因する遅延によって高速な入力信号波高値が大きい信号は立上時間も大きくなってしまうためである。このため、非特許文献1に記載されている発明では、入射するガンマ線のエネルギーが中性子のエネルギー以上の場合、弁別が不可能となり、計数誤差を生じる。
又、非特許文献1では、ガンマ線と中性子線による入力信号が、短い時間間隔内で入射する場合への対応は考慮されておらず、パルス波形分析装置の時定数よりも短い時間間隔内でガンマ線と中性子線による入力信号があった場合にパイルアップを起こすことから、正確なエネルギーが計測できなくなり、精度が下がる。
即ち、例示的な検討例ではあるが、ガンマ線と中性子とが、同時又は一方がシンチレータに入射した際の発光による電流波形を比較すると、ガンマ線については、立ち上がり部の信号強度と立ち下がり部の減衰強度が線形比例すること、中性子については、非線形関係となる物理現象を応用して、第1波形と第2波形を有する任意の強度の物理量を正確に分離して計数する波形弁別装置、波形弁別方法及び波形弁別プログラムを見いだした。
即ち、本発明の第3の態様は、(a)波形検出器に被測定パルスの波形を入力させ、被測定パルスの物理量を電気信号に変換させる命令と、(b)アナログ増幅器に電気信号の過渡応答波形を時間軸に沿って拡大して増幅させる命令と、(c)AD変換器に電気信号の立ち上がり期間及び立ち下がり期間において、増幅された電気信号を標本化してデジタルデータに変換させる命令と、(d)信号処理回路の差分値計算回路、減衰量計算回路及び差分値積算回路を互いに連携させ、デジタルデータを用いて、立ち上がり期間の特徴量を第1座標軸上の点として計算させ、立ち下がり期間の特徴量を第2座標軸上の点として計算させる命令と、(e)信号処理回路の2次元座標プロット回路に、第1座標軸上の点及び第2座標軸上の点の組を座標点として、第1座標軸と第2座標軸が定義する弁別平面に、座標点をプロットさせる命令と、(f)信号処理回路の波形弁別判定回路に、座標点のプロット位置から、被測定パルスが第1波形、或いは第1波形とは異なる第2波形であるのか弁別させる命令とを含む一連の命令を制御回路に実行させる波形弁別プログラムであることを要旨とする。
又、以下に示す第1の実施の形態は、本発明の技術的思想を具体化するための装置や方法を例示するものであって、本発明の技術的思想は、構成部品の材料、形状、構造、配置等を下記のものに特定するものでない。本発明の技術的思想は、特許請求の範囲に記載された請求項が規定する技術的範囲内において、種々の変更を加えることができる。
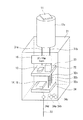
本発明の第1の実施の形態に係る波形弁別装置は、図1に示すように、被測定パルスの波形を入力し、被測定パルスの物理量を電気信号に変換する波形検出器12と、波形検出器12に接続され、電気信号の過渡応答波形を時間軸に沿って拡大して増幅するアナログ増幅器13と、アナログ増幅器13に接続され、電気信号の立ち上がり期間及び立ち下がり期間において、増幅された電気信号を標本化してデジタルデータに変換するAD変換器14と、AD変換器14に接続され、デジタルデータを用いて、立ち上がり期間の特徴量を第1座標軸上の点として計算し、立ち下がり期間の特徴量を第2座標軸上の点として計算し、更に、第1座標軸上の点及び第2座標軸上の点の組を座標点として、第1座標軸と第2座標軸が定義する弁別平面に、座標点をプロットする信号処理回路15と、信号処理回路15に接続された表示装置16及びデータ記憶装置18と、波形検出器12、アナログ増幅器13、AD変換器14、信号処理回路15及び表示装置16に接続された制御回路17と、制御回路17に接続されたプログラム記憶装置19とを備える。
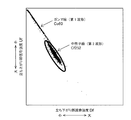
第1の実施の形態に係る波形弁別装置は、図11に示す弁別平面上の座標点の分布位置から、弁別対象信号が第1波形を発生源とするのか、或いは第2波形を発生源とするのかをリアルタイムで自動的に弁別することができる。特に、図11に示す弁別平面に対し、図12に示すように、弁別用の窓部及び弁別用線形方程式を定義することにより、弁別対象信号が第1波形を発生源とするのか、或いは第2波形を発生源とするのかを、コンピュータソフトウェアの処理にしたがって、リアルタイムで自動的に弁別することができる。
即ち、第1の実施の形態に係る波形弁別装置は、図2及び図3に示すように、中性子線及びガンマ線を光に変換する放射線−光変換素子11と、放射線−光変換素子11に接続された放射線−光変換素子11の発光する光を電気信号に変換する光検出器12aとを備えている。中性子線及びガンマ線をそれぞれ過渡応答特性の波形が異なる物理量である光に変換する放射線−光変換素子11としては、表1に示すようなCsLiYCl,LiCaAlF6,LiF/ZnS,LiBaF3,Li6Gd(BO3)3等を使用することが可能である。

図5において、ガンマ線(第1波形)での発光は、数ナノ秒程度の非常に発光時間の短い発光と、先端の鋭いピークに続くブロードな発光をしている。一方、中性子線(第2波形)の発光は、図5に示すように、数百ナノ秒以下程度の比較的発光時間の長い発光に特徴がある。ガンマ線(第1波形)での発光はチェレンコフ発光であると言われている。
筐体21の底面には信号処理回路15の条件を設定する調整つまみ34a,34b,34c,34dが設けられている。筐体21の底面には孔が設けられ、この孔から、信号処理回路15に回路基板24中の埋め込配線又は表面配線を介して接続される通信用ケーブル33が筐体21の外部に導かれている。
更に、図1の制御回路17についても、その少なくとも一部の機能を分散させることにより、現実の物理的な構造として制御回路17を筐体21の内部構造として存在させてもよい。場合によっては、制御回路17を信号処理回路15の内部構造として構成することや、逆に、制御回路17の内部構造に信号処理回路15やAD変換器14を機能ブロック等の形で集積化するような種々の物理的な構造を実現してもよい。
図2に示すようなアナログ増幅器13の回路を構成することで、第1の実施の形態に係る波形弁別装置では、放射線−光変換素子11で変換された光を光検出器12aで第1又は第2の電気信号に逐次変換し、アナログ増幅器13にて、第1又は第2の電気信号を、対応する第1又は第2の電圧信号への変換と増幅を行うことができる。
図4(a)は、光検出器12aの出力を50Ωで終端した場合において、第1波形(ガンマ線)の光が光検出器12aに入射したことにより光検出器12aから出力される第1の電気信号のパルス波形である。光検出器12aの出力を50kΩで終端した場合は、50Ωで終端した場合に比して、図4(b)に示すように1000倍程度に過渡応答波形が時間軸方向に拡大されることが分かる。
図6(a)は、図5と同様に、図4(a)の第1の電気信号のV部で示したパルス波形を時間軸を拡大して示す図である。図6(a)に示すように第1波形(ガンマ線)は、半値幅4ns程度の急峻な立ち上がり/立ち下がり特性を示す尖塔部分と、この尖塔部分が立ち上がったのち再び緩やかな立ち上がり/立ち下がり特性を示す丘状部分の2つの部分を有することが分かる。図6(b)は、図6(a)との比較のために、第2の電気信号のパルス波形を、図6(a)と時間軸を共通にして示しているが、第2の電気信号には、図6(a)に示すような急峻な立ち上がり/立ち下がり特性を示す尖塔部分が存在しないことが分かる。
AD変換器14は、第1及び第2の電気信号の波高値だけでなく減衰時間の違いを取得することで、AD変換器14に接続された信号処理回路15が、図9及び図10に示すフローチャートにしたがって、図12に示すような弁別平面の上に座標点を逐次生成し、2次元分布が作成される。第1座標軸と第2座標軸が定義する2軸間の相関の違いから、図12に示すように2次元分布の領域が決定され、第1波形(ガンマ線)と第2波形(中性子線)の立ち上がり特性及び立ち下がり特性の違いが判断できるので、第1波形(ガンマ線)と第2波形(中性子線)とを弁別することが可能となる。
特に、放射線計測応用の分野においては、非特許文献1に記載の発明のシステム構成では、このシステム構成に用いられていた電荷感応型前置増幅器の過渡特性(スルーレート)に起因する計数誤差の問題があった。第1の実施の形態に係る波形弁別装置によれば、電荷感応型前置増幅器に起因した計数誤差の問題を回避することができるという顕著な効果を奏することができる。
図9〜図13を用いて、本発明の第1の実施の形態に係る波形弁別方法の基本となる2次元分布の作成方法を説明する。なお、以下に述べる2次元分布の作成方法は、一例であり、特許請求の範囲に記載した趣旨の範囲内であれば、この変形例を含めて、これ以外の種々の2次元分布の作成方法が実現可能であることは勿論である。
図9のステップS101において、図13に示した信号処理回路15の窓部境界条件決定回路151が弁別窓部境界条件を決定し、プログラムカウンタ161がプログラム記憶装置19から次に読み出す命令のアドレスをカウントして、ステップS102に信号処理回路15の処理を進める。図9のステップS102において、図13に示した信号処理回路15の線形方程式決定回路152が弁別用線形方程式を決定し、プログラムカウンタ161がステップS103に信号処理回路15の処理を進める。
ステップS106では差分値積算回路153が、データ記憶装置18に格納された標本値Ujを読み出し、差分値ΔUj+1,j=Uj+1−Ujを計算し、計算結果を演算進行判定回路157に出力する。図8のj=mの例では、差分値ΔUm+1,m=Um+1−Umを計算し、計算結果を演算進行判定回路157に出力する。ステップS106において、演算進行判定回路157は、差分値ΔUj+1,jが立ち上がり期間の特徴量の下限識別値LLD(U)より大きいか否かを判定する。
ステップS114では、差分値積算回路153が、新たな特徴量Usの値(=Us+ΔUj+1,j+ΔUj+2 ,j+1)及び標本値Uj+2をデータ記憶装置18に格納する。ステップS114では、プログラムカウンタ161がプログラム記憶装置19から次に読み出す命令のアドレスをj+2からj+1に戻し、更にデータ記憶装置18に格納された次の標本値Uj+1のアドレスを新たな標本値Ujのアドレスに置き換え、新たな標本値Uj+1を演算進行判定回路157がデータ記憶装置18から読み出し、ステップS106に戻る。
演算進行判定回路157は、ステップS202において、減衰量Ddjが立ち下がり期間の特徴量の下限識別値LLD(D)より大きいか否かを判定する。ステップS202で、減衰量Ddjが立ち下がり期間の特徴量の下限識別値LLD(D)より大きいと判断された場合は、ステップS203に進み、減衰量Ddjをデータ記憶装置18に格納する。
ステップS202で、減衰量Ddjが立ち下がり期間の特徴量の下限識別値LLD(D)より大きくないと判断された場合は、ステップS206に進む。ステップS206では、データ記憶装置18に格納された次の標本値Dj+1を新たな標本値Djに置き換え、この新たな標本値Djを減衰量計算回路154が取り込み、信号処理回路15の処理はステップS202に戻る。
ステップS204で、減衰量の差分値ΔDj+1,jが立ち下がり期間の特徴量の下限識別値LLD(D)より大きいと判断、又は減衰量Ddj+1が減衰量Ddjより大きいと判断された場合は、ステップS211に進み、減衰量Ddj+1及び減衰量の差分値ΔDj+1,jをデータ記憶装置18に格納する。ステップS211では更に、減衰量計算回路154が標本値Dj+2とピーク値Dpをデータ記憶装置18から読み出し、減衰量Ddj+2=Up−Dj+2を計算し、ステップS212に進む。ステップS211におけるデータ記憶装置18に格納された標本値Dj+2を減衰量計算回路154が読み出す処理は、第1波形又は第2波形が測定されたタイミングでAD変換器14から減衰量計算回路154に標本値Dj+2が、データ記憶装置18を介さずに直接取り込まれるようにすることもできる。
ステップS212では、差分値積算回路153が、減衰量の差分値ΔDj+2,j=Ddj+2−Ddj+1を計算し、減衰量の差分値ΔDj+2,j+1が減衰量の差分値ΔDj+1,jより大きいか否か、又は減衰量Ddj+2が減衰量Ddj+1より大きいか否かを判定する。ステップS212で、減衰量の差分値ΔDj+2,j+1が減衰量の差分値ΔDj+1,jより大きい又は減衰量Ddj+2が減衰量Ddj+1より大きいか、のいずれかの条件を満足した場合は、減衰量の差分値ΔDj+2,j+1を差分値積算回路153に出力して、ステップS213に進む。
ステップS213では、差分値積算回路153が、特徴量Ds及び減衰量の差分値ΔDj+1,jをデータ記憶装置18から読み出し、Ds+ΔDj+1,j+ΔDj+2,j+1の値を計算し、計算結果を新たなDsとしてステップS214に進む。ステップS214では、差分値積算回路153が、新たな特徴量Dsの値(=Ds+ΔDj+1,j+ΔDj+2,j+1)及び減衰量Ddj+2をデータ記憶装置18に格納する。ステップS214では、プログラムカウンタ161がプログラム記憶装置19から次に読み出す命令のアドレスをj+2からj+1に戻し、更にデータ記憶装置18に格納された次の減衰量Ddj+1のアドレスを新たな減衰量Ddjのアドレスに置き換え、新たな標本値Dj+1を減衰量計算回路154がデータ記憶装置18から読み出し、ステップS204に戻る。
ステップS222では、信号処理回路15の2次元座標プロット回路156が、第2座標軸の値Dfと第1座標軸の値Ufとの組からなる座標(Uf,Df)を示す点を、図12に示したような、第1座標軸と第2座標軸が定義する弁別平面にプロットする。座標(Uf,Df)が弁別平面にプロットされたら、ステップS103に戻り、立ち上がり期間の特徴量Usをリセットする。ステップS103に戻ると、プログラムカウンタ161が信号処理回路15が、クロック信号に同期させて、図9及び図10に示すフローチャートに示された処理を時々刻々を実行させる。次の第1のパルス群に含まれるパルス又は第2のパルス群に含まれるパルスが波形検出器12に入力され、第1及び第2の電気信号の少なくとも一方が、波形検出器12から弁別対象信号として出力されることにより、2次元座標プロット回路156が、第1座標軸の値Ufと第2座標軸の値Dfとの組からなる座標(Uf,Df)を示す新たな点を、図12に示したような、第1座標軸と第2座標軸が定義する弁別平面にプロットする。
即ち、パイルアップが発生し、ステップS212で減衰量Ddj+2が減衰量Ddj+1より小さいと判断された場合は、ステップS221及びステップS222を経由してステップS103に戻る。図14に示すようなパイルアップが発生した場合は、ステップS103において、演算進行判定回路157が立ち上がり期間の特徴量Usをリセットし(Us=0)、ステップS104に信号処理回路15の処理が進むことによりパイルアップ箇所の波形が測定できる。
そして、第1の実施の形態に係る波形弁別方法を実現するための波形弁別装置の構成は、図1〜図3及び図13に示したような簡単かつ安価なハードウェア資源を基礎としているので、結果として、測定に必要な費用も安価にできる。又、測定に用いる波形弁別装置を小型の回路基板上に集積化してポータブル化が容易であるので、作業性が向上するという顕著な効果を奏することができる。
信号処理回路15の波形点累積回路159は、図10のステップS222から図9のステップS103に戻る帰還ループを、信号処理回路15を駆動する電源が入っている限り、継続的に繰り返す。図9及び図10に示す一連のフローに沿ったループの繰り返しに応じて、新たな点が弁別平面上に逐次累積されるので、弁別平面には多数の座標点が、第1のパルス群に含まれるパルスの波形であるのか、又は第2のパルス群に含まれるパルスの波形であるのかに依拠して、局在してプロットされる。図12に示すように、弁別平面上に複数の座標点が局在した領域に分布するので、図15に示すフローチャートにしたがって、局在した領域を分類し、解析することにより、第1のパルス群に含まれるパルスの波形であるのか、第2のパルス群に含まれるパルスの波形であるのかが、弁別できる。
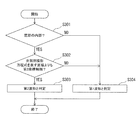
ステップS302においては、第1座標軸の値Ufと第2座標軸の値Dfとの組で定義される座標点(Uf,Df)の分布が、弁別用線形方程式を表す直線よりも第2座標軸側の領域に存在するか否かを波形弁別判定回路158が判断する。弁別用線形方程式は図12に示すように傾きa、第1座標軸の切片bの1次関数で表現される。
ステップS301で座標点(Uf,Df)の分布が、弁別用線形方程式を表す直線よりも第2座標軸側に位置しないと判断された場合は、波形弁別判定回路158は、ステップS304において、波形検出器12から出力された弁別対象信号が第1波形を発生源とする信号であると判断する。一方、ステップS301において、座標点(Uf,Df)の分布が、弁別用線形方程式を表す直線よりも第2座標軸側に位置すると判断された場合は、ステップS303に進み、波形弁別判定回路158は、波形検出器12から出力された弁別対象信号が第2波形を発生源とする信号であると判断する。
波形点累積回路159が累積し、計数した第1波形及び第2波形にそれぞれ対応した座標の累積数は、信号処理回路15の累積数表示命令回路160が、図1及び図3に示す表示装置16に対し、表示命令及び表示に必要なデータを送信することによって、表示装置16に表示させることができる。
本発明者らは、一例としてガンマ線と中性子線の波形を互いに分離する第1の実施の形態に係る波形弁別方法の応用において、図11に示すように、ガンマ線の立ち上がり特徴量Ufとガンマ線の立ち下がり特徴量Dfとが線形比例することを見いだした。一方、図11に示すように、中性子線の立ち上がり特徴量Ufとガンマ線の立ち下がり特徴量Dfとの間にも、ガンマ線の場合に比すと弱いが、その座標点の分布領域のトポロジーには同様な線形比例の関係が認められることを見いだした。ガンマ線の立ち上がり特徴量Ufと立ち下がり特徴量Dfとの強い線形比例関係を、予め弁別用線形方程式Uf=aDf+bとして求めておくことにより、第1波形と第2波形とが正確に弁別できる。
ステップS402において探索された立ち上がり期間のピーク値を用いて、ステップS403では、窓部境界条件決定回路151が、立ち下がり期間の特徴量Dfの下限識別値LLD(D)、立ち下がり期間の特徴量Dfの上限識別値ULD(D)、立ち上がり期間の特徴量Ufの下限識別値LLD(U)及び立ち上がり期間の特徴量Ufの上限識別値ULD(U)を決定する。ステップS403において決定されたLLD(D),ULD(D),LLD(U)及びULD(U)の値は、ステップS404において、データ記憶装置18に格納される。
その後、プログラムカウンタ161によって信号処理回路15の処理がステップS415に進む。ステップS415において、線形方程式決定回路152が、弁別用線形方程式の切片bを決定する。線形方程式決定回路152は、ステップS416において、弁別用線形方程式U=aD+bの平均傾きa及び切片bの値をデータ記憶装置18に格納する。
図9、図10,図15及び図16に示した一連の波形弁別の操作は、図9、図10,図15及び図16と等価なアルゴリズムを実行させるプログラムにより、図1に示した波形弁別装置を制御して実行できる。この波形弁別プログラムは、図1に示したプログラム記憶装置19に記憶させればよい。又、この波形弁別プログラムは、コンピュータ読取り可能な記録媒体に保存し、この記録媒体をプログラム記憶装置19に読み込ませることにより、第1の実施の形態に係る一連の波形弁別の操作を実行することができる。
ここで、「コンピュータ読取り可能な記録媒体」とは、例えばマイクロプロセッサの外部メモリ装置、半導体メモリ、磁気ディスク、光ディスク、光磁気ディスク、磁気テープなどの種々のプログラムを記録することができるような媒体であれば構わない。具体的には、フレキシブルディスク、CD−ROM,MOディスク、カセットテープ、オープンリールテープなどが「コンピュータ読取り可能な記録媒体」に含まれる。
(a)波形検出器12に被測定パルスの波形を入力させ、被測定パルスの物理量を電気信号に変換させる命令;
(b)アナログ増幅器13に電気信号の過渡応答波形を時間軸に沿って拡大して増幅させる命令;
(c)AD変換器14に電気信号の立ち上がり期間及び立ち下がり期間において、増幅された電気信号を標本化してデジタルデータに変換させる命令;
(d)信号処理回路15の差分値計算回路153、減衰量計算回路154及び差分値積算回路155を互いに連携させ、デジタルデータを用いて、立ち上がり期間の特徴量Ufを第1座標軸上の点として計算させ、立ち下がり期間の特徴量Dfを第2座標軸上の点として計算させる命令;
(e)信号処理回路15の2次元座標プロット回路156に、第1座標軸上の点及び第2座標軸上の点の組を座標点として、第1座標軸と第2座標軸が定義する弁別平面に、座標点をプロットさせる命令;
(f)信号処理回路15の波形弁別判定回路158に、座標点のプロット位置から、被測定パルスが第1波形、或いは第1波形とは異なる第2波形であるのか弁別させる命令等を含む一連の命令を、図1に示した制御回路17に実行させる波形弁別プログラムである。
上記のように、本発明は第1の実施の形態によって記載したが、この開示の一部をなす論述及び図面は本発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施の形態、実施例及び運用技術が明らかとなろう。
既に述べた第1の実施の形態の説明においては、第1波形がガンマ線に固有な放射線−光変換素子11からの発光波形、第2波形が中性子線に固有な放射線−光変換素子11からの発光波形の場合において、波形検出器12が第1波形の光パルスを入力して第1の電気信号を出力し、第2波形の光パルスを入力して第2の電気信号を出力する光検出器である場合について例示的に説明したが、第1の実施の形態の説明に限定されるものではない。例えば、波形検出器12が第1波形を有する音波を入力して第1の電気信号を出力し、第2波形を有する音波を入力して第2の電気信号を出力する音響電気変換素子であっても構わない。
このように、本発明はここでは記載していない様々な実施の形態等を含むことは勿論である。したがって、本発明の技術的範囲は上記の説明から妥当な特許請求の範囲に係る発明特定事項によってのみ定められるものである。
12…波形検出器
12a…光検出器
13…アナログ増幅器
14…AD変換器
15…信号処理回路
16…表示装置
17…制御回路
18…データ記憶装置
19…プログラム記憶装置
21…筐体
22…高圧電源
23…回路基板
24…回路基板
31a,31b,32a,32b,32c…ケーブル
33…通信用ケーブル
151…窓部境界条件決定回路
152…線形方程式決定回路
153…差分値積算回路
154…減衰量計算回路
155…差分値積算回路
156…2次元座標プロット回路
157…演算進行判定回路
158…波形弁別判定回路
159…波形点累積回路
160…累積数表示命令回路
161…プログラムカウンタ
162…データ取込回路
163…ピーク値決定回路
164…データバス
Claims (15)
- 中性子線のパルスとガンマ線のパルスを被測定パルスとし、該被測定パルスの波形を入力し、前記被測定パルスの物理量を電気信号に変換する波形検出器と、
前記波形検出器に接続され、前記電気信号の過渡応答波形を時間軸に沿って拡大して増幅するアナログ増幅器と、
前記アナログ増幅器に接続され、前記電気信号の立ち上がり期間及び立ち下がり期間において、増幅された前記電気信号を標本化してデジタルデータに変換するAD変換器と、
前記AD変換器に接続され、
前記立ち上がり期間の互いに連続する2つの前記デジタルデータの第1の差分値を計算する差分値計算回路と、
前記第1の差分値を積算して前記立ち上がり期間の特徴量を第1座標軸上の点として計算する差分値積算回路と、
前記立ち上がり期間のピーク値と前記立ち下がり期間の前記デジタルデータの差分により、前記立ち下がり期間の減衰量を計算する減衰量計算回路と、
2次元座標プロット回路と
を備える信号処理回路であって、前記差分値計算回路は、前記立ち下がり期間の互いに連続する2つの前記減衰量の第2の差分値を計算し、前記差分値積算回路は、前記第2の差分値を積算して前記立ち下がり期間の特徴量を第2座標軸上の点として計算し、前記2次元座標プロット回路は、前記第1座標軸上の点及び前記第2座標軸上の点の組を座標点として、前記第1座標軸と前記第2座標軸が定義する弁別平面に前記座標点をプロットする、前記信号処理回路と、
を備え、前記座標点のプロット位置から、前記被測定パルスが前記ガンマ線が入力されたことに起因する第1波形、或いは前記中性子線が入力されたことに起因し、前記第1波形とは波形の形状が異なる第2波形であるのか弁別することを特徴とする波形弁別装置。 - 前記中性子線及び前記ガンマ線を光に変換する放射線−光変換素子を更に含み、
前記波形検出器は、前記光を電気信号に変換する光検出器であることを特徴とする請求項1に記載の波形弁別装置。 - 前記放射線−光変換素子は、CsLiYCl,LiCaAlF6,LiF/ZnS,LiBaF3,Li6Gd(BO3)3のいずれかを材料とするシンチレータであることを特徴とする請求項2に記載の波形弁別装置。
- 前記波形検出器は、波長190〜450nmの光を電気信号に変換する光検出器でることを特徴とする請求項2又は3に記載の波形弁別装置。
- 前記光検出器は、光電子増倍管、半導体フォトダイオード、フォトダイオードアレイ、ガイガーモード並列読み出しAPDピクセルアレイのいずれかであることを特徴とする請求項2〜4のいずれか1項に記載の波形弁別装置。
- 前記光検出器は光電子増倍管であり、該光電子増倍管の信号出力端子と基準電位点端子が、各々前記アナログ増幅器の入力端子と接地間に接続され、更にアナログ増幅器の入力端子と接地間に5kΩ以上の入力抵抗が接続されていることを特徴とする請求項5に記載の波形弁別装置。
- 前記アナログ増幅器は、前記電気信号の立ち下がり時間が2μ秒以上になるように、前記電気信号の過渡応答波形を時間軸に沿って拡大することを特徴とする請求項1〜6のいずれか1項に記載の波形弁別装置。
- 前記信号処理回路は、予め波形が既知の校正用物理量を前記波形検出器に入力することによって、前記弁別平面上に定めた弁別用の窓部の内部に前記座標点のプロット位置が存在するか否かを判定する波形弁別判定回路を含むことを特徴とする請求項7に記載の波形弁別装置。
- 前記波形弁別判定回路は、立ち下がり期間の特徴量の下限識別値、立ち下がり期間の特徴量の上限識別値、立ち上がり期間の特徴量の下限識別値及び立ち上がり期間の特徴量の上限識別値で囲まれた矩形の領域を前記弁別用の窓部とすることを特徴とする請求項8に記載の波形弁別装置。
- 前記波形弁別判定回路は、前記弁別用の窓部の内部に前記座標点のプロット位置が存在しない判定された場合、前記被測定パルスが前記第1波形であると判別し、
前記弁別用の窓部の内部に前記座標点のプロット位置が存在すると判定された場合、前記被測定パルスが弁別用線形方程式を表す直線よりも第2座標軸側の領域に存在するか否かを判定することを特徴とする請求項8又は9に記載の波形弁別装置。 - 中性子線のパルスとガンマ線のパルスを被測定パルスとし、該被測定パルスの波形を入力し、前記被測定パルスの物理量を電気信号に変換するステップと、
前記電気信号の過渡応答波形を時間軸に沿って拡大して増幅するステップと、
前記電気信号の立ち上がり期間及び立ち下がり期間において、増幅された前記電気信号を標本化してデジタルデータに変換するステップと、
前記デジタルデータを用いて、前記立ち上がり期間の特徴量を第1座標軸上の点として計算するステップと、
前記デジタルデータを用いて、前記立ち下がり期間の特徴量を第2座標軸上の点として計算するステップと、
前記第1座標軸上の点及び前記第2座標軸上の点の組を座標点として、前記第1座標軸と前記第2座標軸が定義する弁別平面に、前記座標点をプロットするステップと、
前記座標点のプロット位置から、前記被測定パルスが前記ガンマ線が入力されたことに起因する第1波形、或いは前記中性子線が入力されたことに起因し、前記第1波形とは波形の形状が異なる第2波形であるのか弁別するステップと、
を含み、前記立ち上がり期間の特徴量を計算するステップは、前記立ち上がり期間の互いに連続する2つの前記デジタルデータの差分値を計算する段階と、前記差分値を積算して前記立ち上がり期間の特徴量を決定する段階とを更に含み、前記立ち下がり期間の特徴量を計算するステップは、互いに連続する2つの前記差分値を比較することにより、前記立ち上がり期間のピーク値を決定する段階と、前記立ち上がり期間のピーク値と前記立ち下がり期間の前記デジタルデータとの差分により、前記立ち下がり期間の減衰量を計算する段階と、前記立ち下がり期間の互いに連続する2つの前記減衰量の差分値を計算する段階と、前記減衰量の差分値を積算して前記立ち下がり期間の特徴量を決定する段階とを更に含むことを特徴とする波形弁別方法。 - 前記弁別するステップでは、予め波形が既知の校正用物理量を入力して測定することによって、前記弁別平面上に定めた弁別用の窓部の内部に前記座標点のプロット位置が存在するか否かを判定することにより、前記第1波形と前記第2波形が弁別されることを特徴とする請求項11に記載の波形弁別方法。
- 前記弁別用の窓部は立ち下がり期間の特徴量の下限識別値、立ち下がり期間の特徴量の上限識別値、立ち上がり期間の特徴量の下限識別値及び立ち上がり期間の特徴量の上限識別値で囲まれた矩形の領域であることを特徴とする請求項12に記載の波形弁別方法。
- 前記弁別用の窓部の内部に前記座標点のプロット位置が存在しない判定された場合、前記被測定パルスが前記第1波形であると判別し、
前記弁別用の窓部の内部に前記座標点のプロット位置が存在すると判定された場合、前記被測定パルスが弁別用線形方程式を表す直線よりも第2座標軸側の領域に存在するか否かを判定することを特徴とする請求項12又は13に記載の波形弁別方法。 - 中性子線のパルスとガンマ線のパルスを被測定パルスとし、該波形検出器に被測定パルスの波形を入力させ、前記被測定パルスの物理量を電気信号に変換させる命令と、
前記波形検出器に接続されたアナログ増幅器に前記電気信号の過渡応答波形を時間軸に沿って拡大して増幅させる命令と、
前記アナログ増幅器に接続されたAD変換器に前記電気信号の立ち上がり期間及び立ち下がり期間において、増幅された前記電気信号を標本化してデジタルデータに変換させる命令と、
前記AD変換器に接続された信号処理回路に備えられた差分値計算回路に前記立ち上がり期間の互いに連続する2つの前記デジタルデータの第1の差分値を計算させる命令と、
前記信号処理回路に備えられた差分値積算回路に前記第1の差分値を積算して前記立ち上がり期間の特徴量を第1座標軸上の点として計算させる命令と、
前記信号処理回路に備えられた減衰量計算回路に前記立ち上がり期間のピーク値と前記立ち下がり期間の前記デジタルデータの差分により、前記立ち下がり期間の減衰量を計算させる命令と、
前記差分値計算回路に前記立ち下がり期間の互いに連続する2つの前記減衰量の第2の差分値を計算させる命令と、
前記差分値積算回路に前記第2の差分値を積算して前記立ち下がり期間の特徴量を第2座標軸上の点として計算させる命令と、
前記信号処理回路に備えられた2次元座標プロット回路に、前記第1座標軸上の点及び前記第2座標軸上の点の組を座標点として、前記第1座標軸と前記第2座標軸が定義する弁別平面に、前記座標点をプロットさせる命令と、
前記信号処理回路に備えられた波形弁別判定回路に、前記座標点のプロット位置から、前記被測定パルスが前記ガンマ線が入力されたことに起因する第1波形、或いは前記中性子線が入力されたことに起因し、前記第1波形とは波形の形状が異なる第2波形であるのか弁別させる命令と、
を含む一連の命令を制御回路に実行させることを特徴とする波形弁別プログラム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2014/001106 WO2015128905A1 (ja) | 2014-02-28 | 2014-02-28 | 波形弁別装置、波形弁別方法及び波形弁別プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2015128905A1 JPWO2015128905A1 (ja) | 2017-03-30 |
| JP6414830B2 true JP6414830B2 (ja) | 2018-10-31 |
Family
ID=54008279
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016504864A Active JP6414830B2 (ja) | 2014-02-28 | 2014-02-28 | 波形弁別装置、波形弁別方法及び波形弁別プログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20160356897A1 (ja) |
| JP (1) | JP6414830B2 (ja) |
| WO (1) | WO2015128905A1 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6628701B2 (ja) * | 2016-08-05 | 2020-01-15 | 三菱電機株式会社 | 放射線測定装置 |
| JP6938239B2 (ja) * | 2017-06-23 | 2021-09-22 | 浜松ホトニクス株式会社 | 光検出器及び光検出装置 |
| JP2019052854A (ja) * | 2017-09-12 | 2019-04-04 | 株式会社東芝 | 放射線検出装置および放射線検出方法 |
| JP7438893B2 (ja) * | 2020-08-24 | 2024-02-27 | 株式会社東芝 | 放射線検出システムおよび放射線検出方法 |
| JP7543221B2 (ja) * | 2021-07-16 | 2024-09-02 | 株式会社日立ハイテク | 信号検出装置、測定装置、および質量分析装置 |
| CN113835114B (zh) * | 2021-08-25 | 2024-04-26 | 吉林大学 | 一种紧凑式高能伽玛射线反符合叠层探测器 |
| CN116819599B (zh) * | 2022-12-26 | 2024-01-23 | 成都理工大学工程技术学院 | 一种中子-伽马射线甄别方法、系统、设备及介质 |
| CN117749141B (zh) * | 2024-02-20 | 2024-05-07 | 成都工业学院 | 堆积脉冲信号识别与成形方法、计算机程序产品及终端 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2994781A (en) * | 1959-08-27 | 1961-08-01 | Atomic Energy Authority Uk | Nuclear particle discriminators |
| JPS57198878A (en) * | 1981-05-30 | 1982-12-06 | Toshiba Corp | Wide-ranged measuring system for neutron |
| JPS6249282A (ja) * | 1985-08-29 | 1987-03-03 | Nippon Atom Ind Group Co Ltd | 放射能濃度モニタ |
| US5347129A (en) * | 1993-04-14 | 1994-09-13 | University Of Missouri-Columbia | System for determining the type of nuclear radiation from detector output pulse shape |
| FR2790560B1 (fr) * | 1999-03-05 | 2001-04-13 | Commissariat Energie Atomique | Procede et dispositif de tri en temps reel d'evenements de detection d'un detecteur de rayonnements gamma et de correction d'uniformite d'elements de detection du detecteur |
| US6953937B2 (en) * | 2003-06-26 | 2005-10-11 | Battelle Energy Alliance, Llc | Method and apparatus for the detection of neutrons and gamma rays |
| JP2008026195A (ja) * | 2006-07-24 | 2008-02-07 | Hitachi Ltd | 中性子強度分布測定装置 |
| JP5034101B2 (ja) * | 2008-12-04 | 2012-09-26 | 株式会社日立製作所 | 放射線モニタリング装置及び放射線モニタリングシステム |
| EP2573590A1 (en) * | 2010-05-18 | 2013-03-27 | Tokuyama Corporation | Neutron beam detector, neutron beam detection scintillator, and method for discrimination between neutron beam and beam |
-
2014
- 2014-02-28 JP JP2016504864A patent/JP6414830B2/ja active Active
- 2014-02-28 US US15/121,645 patent/US20160356897A1/en not_active Abandoned
- 2014-02-28 WO PCT/JP2014/001106 patent/WO2015128905A1/ja not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| US20160356897A1 (en) | 2016-12-08 |
| WO2015128905A1 (ja) | 2015-09-03 |
| JPWO2015128905A1 (ja) | 2017-03-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6414830B2 (ja) | 波形弁別装置、波形弁別方法及び波形弁別プログラム | |
| JP5027124B2 (ja) | パルス波形分析による単一トランスデューサ内同時発生放射線の検出のための方法及び装置 | |
| US6362472B1 (en) | Method for calibrating a radiation detection system | |
| KR101864716B1 (ko) | 알파·베타·감마 방사선 검출기능을 갖는 스마트 슬림형 플라스틱 섬광계수기 | |
| US20070210247A1 (en) | Stabilization of a Scintillation Detector | |
| CN104614757B (zh) | 一种标定伽马相机中光电转换模块增益的方法和系统 | |
| CN107076861B (zh) | 剂量率测定装置 | |
| Akerib et al. | FPGA-based trigger system for the LUX dark matter experiment | |
| KR102280128B1 (ko) | 방사성 핵종 판별 장치 및 방법 | |
| EP3676640B1 (en) | Methods and systems for calibration of particle detectors | |
| JP7120608B2 (ja) | 放射線計測装置 | |
| KR102644122B1 (ko) | 핵종판별을 위한 방사선 스펙트럼의 온도보상방법 | |
| JP2019015509A (ja) | 放射能分析装置 | |
| JP2001194460A (ja) | 放射線モニタ | |
| CN109655929B (zh) | 一种基于pgnaa技术的地雷位置精确确定方法 | |
| CN116299640A (zh) | 一种便携式宇生缪子探测系统 | |
| CN201518007U (zh) | 锂6玻璃闪烁体式中子土壤水分仪高效探头 | |
| JP2014025895A (ja) | 放射性セシウム簡易測定方法及び可搬式放射性セシウム簡易測定装置 | |
| JP6818579B2 (ja) | 土壌放射能汚染検査装置 | |
| JP2012103179A (ja) | 放射線検出装置及びその方法 | |
| RU215240U1 (ru) | Чувствительный элемент блока механической калибровки | |
| KR101192175B1 (ko) | 감마선 섬광 계수기의 에너지 교정 방법 | |
| CN115342934B (zh) | 一种水下激光脉冲时域展宽测量系统及方法 | |
| JP7805472B2 (ja) | 放射能分析装置及び放射能分析方法 | |
| USRE25634E (en) | Nuclear borehole logging utilizing a |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170217 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20170217 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180109 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180308 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20180522 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180723 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20180723 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20180813 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180828 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180925 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6414830 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |