JP6420943B2 - 変速機コンバーター駆動板のための磁気トルクセンサー - Google Patents
変速機コンバーター駆動板のための磁気トルクセンサー Download PDFInfo
- Publication number
- JP6420943B2 JP6420943B2 JP2013021137A JP2013021137A JP6420943B2 JP 6420943 B2 JP6420943 B2 JP 6420943B2 JP 2013021137 A JP2013021137 A JP 2013021137A JP 2013021137 A JP2013021137 A JP 2013021137A JP 6420943 B2 JP6420943 B2 JP 6420943B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic field
- magnetic
- disk
- field sensors
- sensing device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F7/00—Magnets
- H01F7/02—Permanent magnets [PM]
- H01F7/0205—Magnetic circuits with PM in general
- H01F7/021—Construction of PM
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H41/00—Rotary fluid gearing of the hydrokinetic type
- F16H41/24—Details
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/14—Rotary-transmission dynamometers wherein the torque-transmitting element is other than a torsionally-flexible shaft
- G01L3/1407—Rotary-transmission dynamometers wherein the torque-transmitting element is other than a torsionally-flexible shaft involving springs
- G01L3/1428—Rotary-transmission dynamometers wherein the torque-transmitting element is other than a torsionally-flexible shaft involving springs using electrical transducers
- G01L3/1435—Rotary-transmission dynamometers wherein the torque-transmitting element is other than a torsionally-flexible shaft involving springs using electrical transducers involving magnetic or electromagnetic means
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N35/00—Magnetostrictive devices
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Electromagnetism (AREA)
- General Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Mechanical Engineering (AREA)
- Power Steering Mechanism (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
- Measuring Magnetic Variables (AREA)
Description
この特許出願は、2011年10月18日に出願された米国特許出願第13/275,693号の一部継続であり、その出願に関係し、その出願の優先権を主張するものである。
パワー = トルク×2π×回転速度、
および
エネルギー = パワー/時間
である。
112 上面
114 底面
140 磁気弾性的アクティブ領域
142 磁気的調整領域
143 磁気的調整領域
144 磁気的調整領域
145 磁気的調整領域
152 磁場センサー
154 磁場センサー
156 導体
202 永久磁石
204 永久磁石
302 永久磁石
304 永久磁石
546 磁力線
548 磁力線
552 磁場センサー
554 磁場センサー
646 磁力線
648 磁力線
652 磁場センサー
654 磁場センサー
850 磁場センサーユニット
852 一次磁場センサー
854 一次磁場センサー
856 二次磁場センサー
858 二次磁場センサー
946 磁力線
948 磁力線
950 磁場センサーユニット
952 一次磁場センサー
954 一次磁場センサー
956 二次磁場センサー
958 二次磁場センサー
960 磁場センサーユニット
962 一次磁場センサー
964 一次磁場センサー
966 二次磁場センサー
968 二次磁場センサー
972 磁場センサー
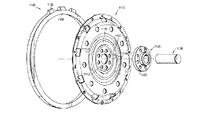
1100 トルク変換器
1110 ディスク
1112 穴
1120 ハブ
1122 穴
1130 シャフト
1140 磁気弾性的アクティブ領域
1152 磁場センサー
1154 磁場センサー
1160 リム
1162 力移送特徴
1210 ボビン
1212 区画
1214 セパレーター
1216 環状溝
1218 放射状に延びる溝
1222 遮へい部材
1224 遮へい部材
Claims (35)
- 間隔のあいた円形の対向面を有し、回転中心軸を形成するディスク状部材と、
前記ディスク状部材に印加されるトルクとともに変化する磁場を生成するための磁気弾性的アクティブ領域を形成する、前記ディスク状部材の少なくとも一部分の上または中に配置される放射状に延びる磁歪を示す磁気的調整領域であって、前記磁気弾性的アクティブ領域は、前記ディスク状部材に印加される前記トルクがゼロまで低下するとき、前記磁気弾性的アクティブ領域での磁化を初期状態に戻すのに十分な磁気異方性を保有する、磁気的調整領域と、
前記磁気的調整領域に近接して配置される複数の磁場センサーであって、前記磁場センサーのそれぞれは、前記磁気的調整領域の分極方向に垂直である感知方向を有する、複数の磁場センサーと、
を含み、
前記磁場センサーは、少なくとも1対の一次磁場センサーと、少なくとも1対の二次磁場センサーと、を備え、
複数対の一次磁場センサーがあるとき、前記複数対の一次磁場センサーは、前記ディスク状部材の軸周りに対称的に配置されるとともに、前記磁気弾性的アクティブ領域の周りに互いに均等に間隔をあけられ、
前記少なくとも1対の一次磁場センサーが感知するコモンモードノイズの影響を相殺するために、前記少なくとも1対の一次磁場センサーにおける磁場センサーの一方は第1の方向に向けられた感知方向を有し、前記磁場センサーの他方は前記第1の方向と反対の第2の方向に向けられた感知方向を有し、
前記少なくとも1対の一次磁場センサーのそれぞれについて、前記少なくとも1対の二次磁場センサーのそれぞれが、前記少なくとも1対の一次磁場センサーのそれぞれの両側に、前記磁気弾性的アクティブ領域から離れて位置決めされ、
前記対の二次磁場センサーにおける磁場センサーの一方は第1の方向に向けられた感知方向を有し、前記対の二次磁場センサーの他方は前記第1の方向と反対の第2の方向に向けられた感知方向を有し、
前記磁場センサーが前記ディスク状部材に印加される前記トルクを表す出力信号を提供し、前記出力信号の変化が前記ディスク状部材に印加される前記トルクの変化に関して実質的に線形である、磁気トルク感知デバイス。 - 前記磁気的調整領域は、環状形状である、請求項1に記載の磁気トルク感知デバイス。
- 前記磁場センサーの少なくともいくつかに磁気遮へいを提供するように構成される遮へい部材をさらに含む、請求項2に記載の磁気トルク感知デバイス。
- 前記磁場センサーの少なくともいくつかに磁気遮へいを提供するように構成される第2の遮へい部材をさらに含み、
前記磁気的調整領域は、前記磁気弾性的アクティブ領域を画定する内側半径および外側半径によって境を限られ、
第1の遮へい部材は、前記磁気弾性的アクティブ領域の前記内側半径にほぼ等しい半径を有し、
前記第2の遮へい部材は、前記磁気弾性的アクティブ領域の前記外側半径にほぼ等しい半径を有する、請求項3に記載の磁気トルク感知デバイス。 - 前記第1および第2の遮へい部材は、ミューメタルで形成される、請求項4に記載の磁気トルク感知デバイス。
- 前記第1の遮へい部材、前記第2の遮へい部材、および前記磁場センサーがその上に配置されるボビンをさらに含む、請求項4に記載の磁気トルク感知デバイス。
- 前記磁気的調整領域は、最初に円周方向に分極され、各磁場センサーの前記感知方向が、実質的に半径方向に向けられている、請求項2に記載の磁気トルク感知デバイス。
- 前記磁気トルク感知デバイスは、互いに角度的にオフセットされる少なくとも4つの磁場センサーを含む、請求項7に記載の磁気トルク感知デバイス。
- 前記磁気トルク感知デバイスは、互いに角度的にオフセットされる少なくとも8つの磁場センサーを含む、請求項7に記載の磁気トルク感知デバイス。
- 少なくとも1つの磁場センサーユニットは、フラックスゲートセンサーを含む、請求項7に記載の磁気トルク感知デバイス。
- 少なくとも1つの磁場センサーユニットは、ホール効果センサーを含む、請求項7に記載の磁気トルク感知デバイス。
- 前記ディスク状部材の少なくとも一部分は、少なくともAISI9310材料から作られる、請求項7に記載の磁気トルク感知デバイス。
- 前記ディスク状部材は、15Oeよりも大きい保磁力を有する材料で形成される、請求項7に記載の磁気トルク感知デバイス。
- 前記ディスク状部材は、20Oeよりも大きい保磁力を有する材料で形成される、請求項7に記載の磁気トルク感知デバイス。
- 前記ディスク状部材は、35Oeよりも大きい保磁力を有する材料で形成される、請求項7に記載の磁気トルク感知デバイス。
- 前記ディスク状部材は、駆動板を含む、請求項7に記載の磁気トルク感知デバイス。
- トルク伝達要素に印加されるトルクが、前記トルク伝達要素と前記ディスク状部材との間で比例的に伝達されるように、前記回転中心軸において前記ディスク状部材に直接的にもしくは間接的に取り付けられるまたは前記ディスク状部材の一部を形成するトルク伝達要素をさらに含む、請求項7に記載の磁気トルク感知デバイス。
- 前記トルク伝達要素は、クランクシャフトを含む、請求項17に記載の磁気トルク感知デバイス。
- 間隔のあいた円形の対向面を有し、回転中心軸を形成するディスク状部材と、
前記ディスク状部材に印加されるトルクとともに変化する磁場を生成するための磁気弾性的アクティブ領域を形成する、前記ディスク状部材の少なくとも一部分の上または中に配置される放射状に延びる磁歪を示す磁気的調整領域であって、前記磁気弾性的アクティブ領域は、前記ディスク状部材に印加される前記トルクがゼロまで低下するとき、前記磁気弾性的アクティブ領域での磁化を初期状態に戻すのに十分な磁気異方性を保有する、磁気的調整領域と、
前記磁気的調整領域に近接して配置される複数の磁場センサーであって、前記磁場センサーのそれぞれは、前記磁気的調整領域の分極方向に垂直に、実質的に半径方向に向けられた感知方向を有する、複数の磁場センサーと、
を含み、
前記磁場センサーは、少なくとも1対の一次磁場センサーと、少なくとも1対の二次磁場センサーと、を備え、
複数対の一次磁場センサーがあるとき、前記複数対の一次磁場センサーは、前記ディスク状部材の軸周りに対称的に配置されるとともに、前記磁気弾性的アクティブ領域の周りに互いに均等に間隔をあけられ、
前記少なくとも1対の一次磁場センサーが感知するコモンモードノイズの影響を相殺するために、前記少なくとも1対の一次磁場センサーにおける磁場センサーの一方は第1の方向に向けられた感知方向を有し、前記磁場センサーの他方は前記第1の方向と反対の第2の方向に向けられた感知方向を有し、
前記少なくとも1対の一次磁場センサーのそれぞれについて、前記少なくとも1対の二次磁場センサーのそれぞれが、前記少なくとも1対の一次磁場センサーのそれぞれの両側に、前記磁気弾性的アクティブ領域から離れて位置決めされ、
前記対の二次磁場センサーにおける磁場センサーの一方は第1の方向に向けられた感知方向を有し、前記対の二次磁場センサーの他方は前記第1の方向と反対の第2の方向に向けられた感知方向を有し、
前記磁場センサーは、前記ディスク状部材に印加される前記トルクを表す出力信号を提供し、前記出力信号の変化は、前記ディスク状部材に印加される前記トルクの変化に関して実質的に線形である、磁気トルク感知デバイス。 - 前記磁気的調整領域は、環状形状である、請求項19に記載の磁気トルク感知デバイス。
- 前記磁場センサーの少なくともいくつかに磁気遮へいを提供するように構成される遮へい部材をさらに含む、請求項20に記載の磁気トルク感知デバイス。
- 前記磁場センサーの少なくともいくつかに磁気遮へいを提供するように構成される第2の遮へい部材をさらに含み、
前記磁気的調整領域は、前記磁気弾性的アクティブ領域を画定する内側半径および外側半径によって境を限られ、
第1の遮へい部材は、前記磁気弾性的アクティブ領域の前記内側半径にほぼ等しい半径を有し、
前記第2の遮へい部材は、前記磁気弾性的アクティブ領域の前記外側半径にほぼ等しい半径を有する、請求項21に記載の磁気トルク感知デバイス。 - 前記第1および第2の遮へい部材は、ミューメタルで形成される、請求項22に記載の磁気トルク感知デバイス。
- 前記第1の遮へい部材、前記第2の遮へい部材、および前記磁場センサーがその上に配置されるボビンをさらに含む、請求項22に記載の磁気トルク感知デバイス。
- 前記磁気的調整領域は、最初に円周方向に分極される、請求項20に記載の磁気トルク感知デバイス。
- 前記磁気的調整領域は、最初に軸方向に分極される、請求項20に記載の磁気トルク感知デバイス。
- 少なくとも1つの磁場センサーユニットは、フラックスゲートセンサーを含む、請求項20に記載の磁気トルク感知デバイス。
- 少なくとも1つの磁場センサーユニットは、ホール効果センサーを含む、請求項20に記載の磁気トルク感知デバイス。
- 前記ディスク状部材の少なくとも一部分は、少なくともAISI9310材料から作られる、請求項20に記載の磁気トルク感知デバイス。
- 前記ディスク状部材は、15Oeよりも大きい保磁力を有する材料で形成される、請求項20に記載の磁気トルク感知デバイス。
- 前記ディスク状部材は、20Oeよりも大きい保磁力を有する材料で形成される、請求項20に記載の磁気トルク感知デバイス。
- 前記ディスク状部材は、35Oeよりも大きい保磁力を有する材料で形成される、請求項20に記載の磁気トルク感知デバイス。
- 前記ディスク状部材は、駆動板を含む、請求項20に記載の磁気トルク感知デバイス。
- トルク伝達要素に印加されるトルクが、前記トルク伝達要素と前記ディスク状部材との間で比例的に伝達されるように、前記回転中心軸において前記ディスク状部材に直接的にもしくは間接的に取り付けられるまたは前記ディスク状部材の一部を形成するトルク伝達要素をさらに含む、請求項20に記載の磁気トルク感知デバイス。
- 前記トルク伝達要素は、クランクシャフトを含む、請求項34に記載の磁気トルク感知デバイス。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/368,079 | 2012-02-07 | ||
| US13/368,079 US8635917B2 (en) | 2011-10-18 | 2012-02-07 | Magnetic torque sensor for transmission converter drive plate |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013160770A JP2013160770A (ja) | 2013-08-19 |
| JP2013160770A5 JP2013160770A5 (ja) | 2013-12-12 |
| JP6420943B2 true JP6420943B2 (ja) | 2018-11-07 |
Family
ID=47664211
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013021137A Active JP6420943B2 (ja) | 2012-02-07 | 2013-02-06 | 変速機コンバーター駆動板のための磁気トルクセンサー |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP2626678B1 (ja) |
| JP (1) | JP6420943B2 (ja) |
| KR (1) | KR102015824B1 (ja) |
| AU (1) | AU2013200469B2 (ja) |
| CA (1) | CA2804701C (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018517153A (ja) * | 2015-06-10 | 2018-06-28 | メソード・エレクトロニクス・インコーポレーテッド | 負荷およびトルク検出デバイス |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2990772A1 (en) * | 2014-08-29 | 2016-03-02 | Methode Electronics Malta Ltd. | Magnetoelastic torque sensor system for drive train, drive train, method of measuring torque in a drive train, method of operating a drive train and method of manufacturing a primary sensor unit |
| US20170102279A1 (en) * | 2015-10-09 | 2017-04-13 | Methode Electronics Malta Ltd. | Torque Sensor Assembly for an Engine Comprising a Central Disc and an Outer Rim |
| EP3379222B1 (en) | 2017-03-22 | 2020-12-30 | Methode Electronics Malta Ltd. | Magnetoelastic based sensor assembly |
| US11084342B2 (en) | 2018-02-27 | 2021-08-10 | Methode Electronics, Inc. | Towing systems and methods using magnetic field sensing |
| US11135882B2 (en) | 2018-02-27 | 2021-10-05 | Methode Electronics, Inc. | Towing systems and methods using magnetic field sensing |
| US11221262B2 (en) | 2018-02-27 | 2022-01-11 | Methode Electronics, Inc. | Towing systems and methods using magnetic field sensing |
| US10670479B2 (en) | 2018-02-27 | 2020-06-02 | Methode Electronics, Inc. | Towing systems and methods using magnetic field sensing |
| US11491832B2 (en) | 2018-02-27 | 2022-11-08 | Methode Electronics, Inc. | Towing systems and methods using magnetic field sensing |
| US11345043B2 (en) | 2018-07-02 | 2022-05-31 | Flexiv Ltd. | Axial force sensor, robot gripper, and robot having the same |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4896544A (en) | 1986-12-05 | 1990-01-30 | Mag Dev Inc. | Magnetoelastic torque transducer |
| SE465942B (sv) * | 1990-02-28 | 1991-11-18 | Asea Brown Boveri | Foerfarande foer att skaerma magnetoelastiska givare |
| US5520059A (en) | 1991-07-29 | 1996-05-28 | Magnetoelastic Devices, Inc. | Circularly magnetized non-contact torque sensor and method for measuring torque using same |
| US5351555A (en) | 1991-07-29 | 1994-10-04 | Magnetoelastic Devices, Inc. | Circularly magnetized non-contact torque sensor and method for measuring torque using same |
| US6047605A (en) | 1997-10-21 | 2000-04-11 | Magna-Lastic Devices, Inc. | Collarless circularly magnetized torque transducer having two phase shaft and method for measuring torque using same |
| GB9808792D0 (en) * | 1998-04-23 | 1998-06-24 | Effective Torque Technologies | Magnetising arrangements for torque/force sensor |
| GB9906735D0 (en) * | 1999-03-23 | 1999-05-19 | Fet Applic Limited | Magnoelastic transducers |
| US6220105B1 (en) * | 1999-04-16 | 2001-04-24 | Magna-Lastic Devices, Inc. | Magnetoelastic disc-shaped load cell having spiral spokes |
| DE1181515T1 (de) * | 1999-04-16 | 2002-08-22 | Magna-Lastic Devices, Inc. | ZIRKULAR MAGNETISIERTER PLATTENFöRMIGER DREHMOMENTWANDLER UND VERFAHREN ZUR MESSUNG DES DREHMOMENTES MIT DEM WANDLER |
| GB9919065D0 (en) * | 1999-08-12 | 1999-10-13 | Fast Technology Gmbh | Transducer Element |
| GB0009492D0 (en) * | 2000-04-17 | 2000-06-07 | Fast Technology Gmbh | Magnetic transducer element and method of preparation |
| GB0114279D0 (en) * | 2001-06-12 | 2001-08-01 | Fast Technology Ag | Disc magnetic torque sensing |
| US8087304B2 (en) | 2008-03-14 | 2012-01-03 | Seong-Jae Lee | Magnetoelastic torque sensor with ambient field rejection |
| US8424393B1 (en) * | 2011-10-18 | 2013-04-23 | Methode Electronics, Inc. | Magnetic torque sensor for transmission converter drive plate |
-
2013
- 2013-01-30 AU AU2013200469A patent/AU2013200469B2/en active Active
- 2013-02-05 CA CA2804701A patent/CA2804701C/en active Active
- 2013-02-06 JP JP2013021137A patent/JP6420943B2/ja active Active
- 2013-02-07 EP EP13154425.6A patent/EP2626678B1/en not_active Not-in-force
- 2013-02-07 KR KR1020130013932A patent/KR102015824B1/ko active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018517153A (ja) * | 2015-06-10 | 2018-06-28 | メソード・エレクトロニクス・インコーポレーテッド | 負荷およびトルク検出デバイス |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2626678A3 (en) | 2016-11-09 |
| EP2626678B1 (en) | 2020-07-15 |
| JP2013160770A (ja) | 2013-08-19 |
| EP2626678A2 (en) | 2013-08-14 |
| CA2804701C (en) | 2020-03-31 |
| KR102015824B1 (ko) | 2019-08-29 |
| AU2013200469A1 (en) | 2013-08-22 |
| CA2804701A1 (en) | 2013-08-07 |
| AU2013200469B2 (en) | 2016-03-24 |
| KR20130091279A (ko) | 2013-08-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8635917B2 (en) | Magnetic torque sensor for transmission converter drive plate | |
| JP6250271B2 (ja) | 変速機駆動プレート用の磁気トルクセンサ | |
| JP6420943B2 (ja) | 変速機コンバーター駆動板のための磁気トルクセンサー | |
| US6581480B1 (en) | Magnetising arrangements for torque/force sensor | |
| JP2545365B2 (ja) | トルク測定装置 | |
| CA2381077C (en) | Circularly magnetized disk-shaped torque transducer and method for measuring torque using same | |
| EP2972167B1 (en) | System and method for reducing rotation noise in a magnetoelastic torque sensing device | |
| EP1181516B1 (en) | Magnetoelastic load cell | |
| US20100242626A1 (en) | Self-compensating magnetoelastic torque sensor system | |
| US20170102279A1 (en) | Torque Sensor Assembly for an Engine Comprising a Central Disc and an Outer Rim | |
| JP4305271B2 (ja) | 磁歪式トルクセンサ | |
| JP6686133B2 (ja) | 負荷およびトルク検出デバイス | |
| JP4876393B2 (ja) | トルク検出装置 | |
| JP2009257898A (ja) | 非接触トルクセンサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131025 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160205 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161110 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161128 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20170227 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170529 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171030 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180130 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180427 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180914 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181015 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6420943 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |