図1は内燃機関EGの全体図を示している。本発明による実施例では、内燃機関EGは火花点火式内燃機関から構成される。図示しない別の実施例では、内燃機関は圧縮着火式内燃機関から構成される。また、図1に示される内燃機関EGは複数、例えば4つの気筒を備えている。
図1を参照すると、1はクランクケース、2はシリンダブロック、3はシリンダヘッド、4はピストン、5は燃焼室、6は燃焼室5の頂面中央部に配置された点火栓、7は吸気弁、8は吸気ポート、9は排気弁、10は排気ポートをそれぞれ示す。吸気ポート8は吸気枝管11を介してサージタンク12に連結され、各吸気枝管11にはそれぞれ対応する吸気ポート8内に向けて燃料を噴射するための燃料噴射弁13が配置される。図示しない別の実施例では、燃料噴射弁13は各燃焼室5内に配置される。
サージタンク12は吸気ダクト14を介してエアクリーナ15に連結され、吸気ダクト14内にはアクチュエータ16によって駆動されるスロットル弁17と例えば熱線を用いた吸入空気量検出器18とが配置される。一方、排気ポート10は排気マニホルド19を介して例えば三元触媒を内蔵した触媒コンバータ20に連結され、排気マニホルド19内には空燃比センサ21が配置される。
一方、本発明による実施例ではクランクケース1とシリンダブロック2との連結部にクランクケース1とシリンダブロック2のシリンダ軸線方向の相対位置を変化させることにより内燃機関の機械圧縮比を変更可能な可変圧縮比機構Aが設けられている。なお、ピストンが圧縮上死点に位置するときの燃焼室の容積を燃焼室容積と称すると、機械圧縮比は圧縮行程時のピストンの行程容積と燃焼室容積のみから機械的に定まる値であって、(燃焼室容積+行程容積)/燃焼室容積で表される。
電子制御ユニット30はデジタルコンピュータからなり、双方向性バス31によって互いに接続されたROM(リードオンリメモリ)32、RAM(ランダムアクセスメモリ)33、CPU(マイクロプロセッサ)34、入力ポート35及び出力ポート36を具備する。吸入空気量検出器18の出力信号及び空燃比センサ21の出力信号はそれぞれ対応するAD変換器37を介して入力ポート35に入力される。アクセルペダル40にはアクセルペダル40の踏込み量Lに比例した出力電圧を発生する負荷センサ41が接続され、負荷センサ41の出力電圧は対応するAD変換器37を介して入力ポート35に入力される。更に入力ポート35にはクランクシャフトが例えば30°回転する毎に出力パルスを発生するクランク角センサ42が接続される。更にクランクケース1に対するシリンダブロック2の相対位置を検出する位置センサ43が設けられ、位置センサ43の出力電圧は対応するAD変換器37を介して入力ポート35に入力される。クランクケース1に対するシリンダブロック2の相対位置は機械圧縮比を表している。一方、出力ポート36は対応する駆動回路38を介して点火栓6、燃料噴射弁13、スロットル弁駆動用アクチュエータ16、及び可変圧縮比機構Aに接続される。なお、電子制御ユニット30は本発明の算出手段及び調整手段を構成する。
図2は図1に示す可変圧縮比機構Aの分解斜視図を示しており、図3(A)及び図3(B)は図解的に表した内燃機関の側面断面図を示している。図2を参照すると、シリンダブロック2の両側壁の下方には互いに間隔を隔てた複数個の突出部50が形成されており、各突出部50内にはそれぞれ断面円形のカム挿入孔51が形成されている。一方、クランクケース1の上壁面上には互いに間隔を隔ててそれぞれ対応する突出部50の間に嵌合せしめられる複数個の突出部52が形成されており、これらの各突出部52内にもそれぞれ断面円形のカム挿入孔53が形成されている。
可変圧縮比機構Aは複数の気筒に共通の制御軸を備える。図2に示される例では制御軸は一対のカムシャフト54,55を備え、各カムシャフト54,55上には一つおきに各カム挿入孔51内に回転可能に挿入される円形カム56が固定されている。これらの円形カム56は各カムシャフト54,55の長さ方向軸線又は回転軸線LAと共軸をなす。一方、各円形カム56間には図3においてハッチングで示すように各カムシャフト54,55の回転軸線LAに対して偏心配置された偏心軸57が延びており、この偏心軸57上に別の円形カム58が偏心して回転可能に取付けられている。図2に示されるようにこれら円形カム58は各円形カム56間に配置されており、これら円形カム58は対応する各カム挿入孔53内に回転可能に挿入されている。
図3(A)に示すような状態から各カムシャフト54,55上に固定された円形カム56を図3(A)において実線の矢印で示される如く互いに反対方向に回転させると偏心軸57が下方中央に向けて移動するために円形カム58がカム挿入孔53内において図3(A)の破線の矢印に示すように円形カム56とは反対方向に回転し、図3(B)に示されるように偏心軸57が下方中央まで移動すると円形カム58の中心が偏心軸57の下方へ移動する。
図3(A)と図3(B)とを比較するとわかるようにクランクケース1とシリンダブロック2の相対位置は円形カム56の中心と円形カム58の中心との距離によって定まり、円形カム56の中心と円形カム58の中心との距離が大きくなるほどシリンダブロック2はクランクケース1から離れる。シリンダブロック2がクランクケース1から離れると燃焼室容積は増大し、したがって各カムシャフト54,55を回転させることによって燃焼室容積又は機械圧縮比を変更することができる。
図2に示されるように各カムシャフト54,55を夫々反対方向に回転させるために駆動モータ59の回転軸には夫々螺旋方向が逆向きの一対のウォーム61,62が取付けられており、これらウォーム61,62と噛合するウォームホイール63,64が夫々各カムシャフト54,55の端部に固定されている。この場合、駆動モータ59を駆動することによってピストン4が圧縮上死点に位置するときの燃焼室5の容積が変更され、したがって機会圧縮比が変更される。本発明による実施例では、機械圧縮比が機関運転状態、例えば機関負荷率KL及び機関回転数Neに応じて定まる目標機械圧縮比になるように可変圧縮比機構Aが制御される。
なお、図2において、LLは機関長さ方向を、LWは機関幅方向を、LHは機関高さ方向を、それぞれ示しており、これら機関長さ方向LL、機関幅方向LW、及び機関高さ方向LHは互いに直交する。図2に示されるように、内燃機関EGの気筒は機関長さ方向LL軸線にほぼ沿って配置されている。また、可変圧縮比機構Aのカムシャフト54,55は機関長さ方向LL軸線にほぼ沿って延びている。
なお、可変圧縮比機構Aの別の実施例では、互いに連結されたアッパリンク及びロアリンクを介してピストンピン及びクランクピンが互いに連結され、ロアリンクに連結されたコントロールリンクの動作が制御軸により変更され、それにより圧縮上始点におけるピストン位置が変更され、したがって機械圧縮比が変更される(複リンク式ピストンストローク機構)。可変圧縮比機構Aの更に別の実施例では、シリンダヘッドがシリンダブロックに対し相対移動可能に設けられ、シリンダブロックに対するシリンダヘッドの相対位置が制御軸により変更されることにより、機械圧縮比が変更される。
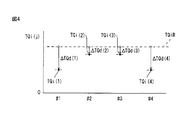
さて、冒頭で説明したように、各気筒の燃焼圧によりシリンダブロック2がクランクケース1に対し相対移動して各気筒の燃焼室容積が増大し、それにより各気筒の図示トルク又は発生トルクが低下するおそれがある。図4はj番気筒(j=1,2,3,4)の図示トルクTQi(j)の低下量ΔTQd(j)(≧0)を模式的に示している。図4に示される例では、j番気筒の図示トルクTQi(j)は、クランクケース1に対するシリンダブロック2の相対移動がないと仮定した場合の各気筒の図示トルク、すなわち基準トルクTQiRから、トルク低下量ΔTQd(j)(≧0)だけそれぞれ低下している。
図4に示される例では、1番気筒のトルク低下量ΔTQd(1)と4番気筒のトルク低下量ΔTQd(4)とは互いにほぼ等しく、2番気筒のトルク低下量ΔTQd(2)と3番気筒のトルク低下量ΔTQd(3)とは互いにほぼ等しい。また、シリンダブロック2の長さ方向LLの外側に位置する1番気筒のトルク低下量ΔTQd(1)及び4番気筒のトルク低下量ΔTQd(4)は、シリンダブロック2の長さ方向LLの内側に位置する2番気筒のトルク低下量ΔTQd(2)及び3番気筒のトルク低下量ΔTQd(3)よりも大きく、j番気筒のトルク低下量ΔTQd(j)のうち最大である。図5はj番気筒のトルク低下量ΔTQd(j)を縦軸にとって図示したものである。
このようにj番気筒の図示トルクTQi(j)及びトルク低下量ΔTQd(j)にはバラツキがある。このようにトルクが気筒間でバラつくと、機関振動及び騒音が好ましくなく増大するおそれがある。そこで本発明による実施例では、燃焼圧による燃焼室容積の増大に起因するトルク低下量ΔTQd(j)を気筒毎に算出し、複数の気筒のトルク低下量ΔTQd(j)が互いにほぼ等しくなるように、トルク低下量ΔTQd(j)に基いて複数の気筒の発生トルクをそれぞれ調整するようにしている。
まず、本発明による実施例における発生トルクの調整方法について説明する。本発明による実施例では目標トルク低下量ΔTQdtが設定され、j番気筒のトルク低下量ΔTQd(j)が目標トルク低下量ΔTQdtになるようにj番気筒の発生トルクが調整される。本発明による実施例では、目標トルク低下量ΔTQdtは、j番気筒のトルク低下量ΔTQd(j)のうち最大のものに設定される。図5に示される例では1番気筒#1のトルク低下量ΔTQd(1)(=ΔTQd(4))が最大であるので、目標トルク低下量ΔTQdtは1番気筒#1のトルク低下量ΔTQd(1)に設定される。図6には、図5に示されるトルク低下量ΔTQd(j)と目標トルク低下量ΔTQdtとの関係が示される。
次いで、j番気筒のトルク低下量ΔTQd(j)を目標トルク低下量ΔTQdtにするのに必要なトルク調整量ΔTQa(j)が算出される(ΔTQa(j)=ΔTQdt−ΔTQd(j))。j番気筒の発生トルクを低下させるべきときにはj番気筒のトルク調整量ΔTQa(j)は正値となり、j番気筒の発生トルクを増大させるべきときにはj番気筒のトルク調整量ΔTQa(j)は負値となる。図6に示される例では、1番気筒#1のトルク調整量ΔTQa(1)及び4番気筒#4のトルク調整量ΔTQa(4)はゼロであり、2番気筒#2のトルク調整量ΔTQa(2)及び3番気筒#3のトルク調整量ΔTQa(3)は「ΔTQdt−ΔTQ」である。すなわち、1番気筒#1及び4番気筒#4ではトルク低下量ΔTQd(1),ΔTQd(4)は変更されない。これに対し、2番気筒#2及び3番気筒#3ではトルク低下量ΔTQd(2),ΔTQd(3)はトルク調整量ΔTQa(2),ΔTQa(3)だけ増大され、あるいは、発生トルクがトルク調整量ΔTQa(2),ΔTQa(3)だけ低下される。
発生トルク又はトルク低下量を調整するには種々の方法が知られている。本発明による実施例では、点火時期を調整することにより発生トルク又はトルク低下量が調整される。具体的には、j番気筒の点火時期SA(j)(クランク角)は例えば次式を用いて算出される。
SA(j)=SAb+ΔSA(j)
ここで、SAbは基本点火時期を、ΔSA(j)はj番気筒の点火時期補正値を、それぞれ示している。
基本点火時期SAbは機関運転状態、例えば機関負荷率KL及び機関回転数Neの関数としてあらかじめ求められており、図7に示されるマップの形であらかじめROM32内に記憶されている。なお、機関負荷率KL(%)は全負荷に対する機関負荷の割合である。
点火時期補正値ΔSA(j)はj番気筒の発生トルクを上述したトルク調整量ΔTQa(j)だけ調整するためのものである。この点火時期補正値ΔSA(j)は、トルク調整量ΔTQa(j)がゼロのときにはゼロであり、トルク調整量ΔTQa(j)が大きくなるにつれて大きくなる。すなわち、トルク調整量ΔTQa(j)が大きくなるにつれて点火時期SA(j)は遅角される。点火時期補正値ΔSA(j)は図8に示されるマップの形であらかじめROM32内に記憶されている。
その結果、各気筒のトルク低下量ΔTQd(j)が互いにほぼ等しくなる。したがって、各気筒の発生トルク量が互いにほぼ等しくなる。このようにして機関の振動及び騒音が抑制される。
次に、本発明による実施例におけるj番気筒のトルク低下量ΔTQd(j)の算出方法を説明する。上述したように、各気筒において燃焼圧により燃焼室容積が増大し、トルクが低下する。この場合、図9に示されるように、j番気筒の燃焼圧による燃焼室容積の増大分ΔV(j)が大きくなるにつれてj番気筒のトルク低下量ΔTQd(j)は大きくなる。そこで本発明による実施例では、まずj番気筒の燃焼室容積増大分ΔV(j)が算出され、次いで図9のマップを用いてj番気筒のトルク低下量ΔTQd(j)が算出される。なお、j番気筒のトルク低下量ΔTQd(j)は図9に示されるマップの形であらかじめROM32内に記憶されている。
j番気筒の燃焼室容積増大分ΔV(j)は例えば次のようにして算出される。上述したように、j番気筒のトルク低下量ΔTQd(j)にはバラツキがあり、したがってj番気筒の燃焼圧による燃焼室容積の増大分にもバラツキがある。燃焼圧による燃焼室容積の増大分が最大となる気筒を容積増大最大気筒と称すると、本発明による実施例ではまずこの容積増大最大気筒の燃焼室容積増大分ΔVmが算出される。容積増大最大気筒の燃焼室容積増大分ΔVmは例えば次式を用いて算出される。
ΔVm=ΔVp+ΔVr+ΔVy
ここで、ΔVpは容積増大最大気筒におけるピッチ方向の燃焼室容積増大分を、ΔVrは容積増大最大気筒におけるロール方向の燃焼室容積増大分を、ΔVyは容積増大最大気筒におけるヨー方向の燃焼室容積増大分を、それぞれ表している。なお、ピッチ方向は図10において矢印Pで示されるように幅方向LWに延びる中心軸線LWC回りの方向である。また、ロール方向は図10において矢印Rで示されるように長さ方向LLに延びる中心軸線LLC回りの方向であり、ヨー方向は図10において矢印Yで示されるように高さ方向LHに延びる中心軸線LHC回りの方向である。
上述したように、燃焼圧による燃焼室容積の増大はクランクケース1に対するシリンダブロック2の相対移動に起因する。このシリンダブロック2の相対移動はピッチ方向の相対移動、ロール方向の相対移動、及びヨー方向の相対移動に分けて考えることができ、燃焼室容積増大分もピッチ方向の相対移動に起因する燃焼室容積増大分ΔVp、ロール方向の相対移動に起因する燃焼室容積増大分ΔVr、及びヨー方向の相対移動に起因する燃焼室容積増大分ΔVyに分けて考えることができる。
燃焼圧によりシリンダブロック2がクランクケース1に対し相対移動しないと仮定したときの各気筒の筒内圧の極大値を筒内圧ピーク値Ppと称すると、図11に示されるように、ピッチ方向の燃焼室容積増大分ΔVp、ロール方向の燃焼室容積増大分ΔVr、及びヨー方向の燃焼室容積増大分ΔVyはそれぞれ筒内圧ピーク値Ppが高くなるにつれて大きくなる。また、ピッチ方向の燃焼室容積増大分ΔVpはロール方向の燃焼室容積増大分ΔVr及びヨー方向の燃焼室容積増大分ΔVyよりも大きい。これら燃焼室容積増大分ΔVp,ΔVr,ΔVyは筒内圧ピーク値Ppの関数として図11に示されるマップの形であらかじめROM32内に記憶されている。
筒内圧ピーク値Ppは例えば次式を用いて算出される。
Pp=Ppb・kPp1・kPp2
ここで、Ppbは基本筒内圧ピーク値を、kPp1は第1の補正係数(0<kPp1≦1)を、kPp2は第2の補正係数(0<kPp2)を、それぞれ表している。
基本筒内圧ピーク値Ppbは、例えばEGR率及び当量比(空燃比)により表される機関運転状態が基本状態にあるときの筒内圧ピーク値であり、図12に示されるように機関負荷率KLが大きくなるにつれて高くなる。基本筒内圧ピーク値Ppbは機関負荷率KLの関数として図12に示されるマップの形であらかじめROM32内に記憶されている。本発明による実施例では、EGR率REGRがゼロでありかつ当量比φが1(理論空燃比)のときに機関運転状態が基本状態にある。なお、EGR率REGRは筒内ガス量(空気量+EGRガス量)に対するEGRガス量の比である。
第1の補正係数kPp1はEGR率REGRに基いて基本筒内圧ピーク値Ppbを補正するためのものである。図13に示されるように第1の補正係数kPp1はEGR率REGRがゼロのときに1となり、EGR率REGRが大きくなるにつれて小さくなる。第1の補正係数kPp1は図13に示されるマップの形であらかじめROM32内に記憶されている。
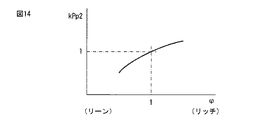
第2の補正係数kPp2は当量比φに基いて基本筒内圧ピーク値Ppbを補正するためのものである。図14に示されるように第2の補正係数kPp2は当量比φが1のときに1となり、当量比φが大きくなるにつれて大きくなる。第2の補正係数kPp2は図14に示されるマップの形であらかじめROM32内に記憶されている。
このように、基本筒内圧ピーク値Ppb、第1の補正係数kPp1、及び第2の補正係数kPp2から筒内圧ピーク値Ppが算出され、筒内圧ピーク値Ppから燃焼室容積増大分ΔVp,ΔVr,ΔVyがそれぞれ算出され、燃焼室容積増大分ΔVp,ΔVr,ΔVyから容積増大最大気筒の燃焼室容積増大分ΔVmが算出される。
図15には、シリンダブロック2の長さ方向LLの中心LL0からj番気筒のシリンダ軸線C(j)までの距離L(j)がそれぞれ示されている。図15において、B(j)はj番気筒のシリンダボアを表しており、LCBはシリンダブロック2の長さ方向LLの長さを表している。図15に示される例では、1番気筒#1の距離L(1)及び4番気筒#4の距離L(4)が互いにほぼ等しく、2番気筒#2の距離L(2)及び3番気筒#3の距離L(3)が互いにほぼ等しい。また、1番気筒#1の距離L(1)及び4番気筒#4の距離L(4)はj番気筒の距離L(j)のうち最も大きい。本発明による実施例では、距離L(j)が最も大きい気筒が容積増大最大気筒であると仮定しており、したがって1番気筒#1及び4番気筒#4が容積増大最大気筒であると仮定している。このため、上述のようにして算出された燃焼室容積増大分ΔVmは1番気筒#1の燃焼室容積増大分ΔV(1)及び4番気筒#4の燃焼室容積増大分ΔV(4)に相当する。
一方、残りの気筒、すなわち2番気筒#2の燃焼室容積増大分ΔV(2)及び3番気筒#4の燃焼室容積増大分ΔV(3)は例えば次のようにして算出される。本発明による実施例では、j番気筒の燃焼室容積増大分ΔV(j)はj番気筒の距離L(j)が大きくなるにつれて大きくなると仮定している。したがって、2番気筒#2の燃焼室容積増大分ΔV(2)は1番気筒#1の燃焼室容積増大分ΔV(1)の(L(2)/L(1))倍であるということになる(ΔV(2)=ΔV(1)・(L(2)/L(1)))。3番気筒#3の燃焼室容積増大分ΔV(3)は2番気筒#2の燃焼室容積増大分ΔV(2)に等しい。
このようにしてj番気筒の燃焼室容積増大分ΔV(j)が算出されると、上述したように図9のマップを用いてj番気筒のトルク低下量ΔTQd(j)が算出される。次いで、目標トルク低下量ΔTQdtが設定され、j番気筒のトルク低下量ΔTQd(j)が目標トルク低下量ΔTQdtになるようにj番気筒の発生トルクが調整される。
図16は本発明による実施例のj番気筒のトルク調整量ΔTQa(j)を算出するためのルーチンを示している。このルーチンはあらかじめ定められた設定時間ごとの割り込みによって実行される。
図16を参照すると、ステップ100では基本筒内圧ピーク値Ppbが図12のマップを用いて算出される。続くステップ101では第1の補正係数kPp1が図13のマップを用いて算出される。続くステップ102では第2の補正係数kPp2が図14のマップを用いて算出される。続くステップ103では筒内圧ピーク値Ppが算出される(Pp=Ppb・kPp1・kPp2)。続くステップ104では燃焼室容積増大分ΔVp,ΔVr,ΔVyが図11のマップをそれぞれ算出される。続くステップ105では容積増大最大気筒の燃焼室容積増大分ΔVmが算出される(ΔVm=ΔVp+ΔVr+ΔVy)。続くステップ106ではj番気筒の燃焼室容積増大分ΔV(j)が算出される。続くステップ107ではj番気筒のトルク低下量ΔTQd(j)が図9のマップを用いて算出される。続くステップ108ではj番気筒のトルク調整量ΔTQa(j)が算出される。
図17は本発明による実施例の点火制御を実行するためのルーチンを示している。このルーチンはあらかじめ定められた設定時間ごとの割り込みによって実行される。
図17を参照すると、ステップ200では基本点火時期SAbが図7のマップを用いて算出される。続くステップ201ではj番気筒の点火時期補正値ΔSA(j)が図8のマップを用いて算出される。続くステップ202ではj番気筒の点火時期SA(j)が算出される(SA(j)=SAb+ΔSA(j))。続くステップ203では点火栓6において点火作用が実行される。
なお、本発明による別の実施例では、燃料噴射量又は当量比を調整することにより発生トルク又はトルク低下量ΔTQd(j)が調整される。この場合、j番気筒のトルク低下量ΔTQd(j)のうち最大のものと最小のものとの間に目標トルク低下量ΔTQdtが設定されるのが好ましい。このようにすると、一部の気筒においてトルク低下量ΔTQd(j)を増大するために燃料噴射量が減少され、又は空燃比がリーン側に移行される。一方、残りの気筒においてトルク低下量ΔTQd(j)を減少するために燃料噴射量が増大され、又は空燃比がリッチ側に移行される。その結果、トルク低下量ΔTQd(j)の気筒間バラツキを抑制しながら、排気ガスの空燃比を維持することが可能となる。なお、排気ガスの空燃比は排気通路のある位置よりも上流の排気通路、燃焼室及び吸気通路に供給された空気及び燃料の比である。