JP6438441B2 - エンコーダの信号処理装置、エンコーダ、信号処理方法及びプログラム - Google Patents
エンコーダの信号処理装置、エンコーダ、信号処理方法及びプログラム Download PDFInfo
- Publication number
- JP6438441B2 JP6438441B2 JP2016153817A JP2016153817A JP6438441B2 JP 6438441 B2 JP6438441 B2 JP 6438441B2 JP 2016153817 A JP2016153817 A JP 2016153817A JP 2016153817 A JP2016153817 A JP 2016153817A JP 6438441 B2 JP6438441 B2 JP 6438441B2
- Authority
- JP
- Japan
- Prior art keywords
- position data
- detection
- approximate
- encoder
- error
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/24471—Error correction
- G01D5/2449—Error correction using hard-stored calibration data
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03M—CODING; DECODING; CODE CONVERSION IN GENERAL
- H03M13/00—Coding, decoding or code conversion, for error detection or error correction; Coding theory basic assumptions; Coding bounds; Error probability evaluation methods; Channel models; Simulation or testing of codes
- H03M13/33—Synchronisation based on error coding or decoding
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/24471—Error correction
- G01D5/24495—Error correction using previous values
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03M—CODING; DECODING; CODE CONVERSION IN GENERAL
- H03M13/00—Coding, decoding or code conversion, for error detection or error correction; Coding theory basic assumptions; Coding bounds; Error probability evaluation methods; Channel models; Simulation or testing of codes
- H03M13/61—Aspects and characteristics of methods and arrangements for error correction or error detection, not provided for otherwise
- H03M13/615—Use of computational or mathematical techniques
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Probability & Statistics with Applications (AREA)
- Mathematical Analysis (AREA)
- Computing Systems (AREA)
- Mathematical Optimization (AREA)
- Mathematical Physics (AREA)
- Pure & Applied Mathematics (AREA)
- Computational Mathematics (AREA)
- Algebra (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
Description
このような検出誤差を補正するために、特許文献1に記載された技術では、検出誤差が元信号の1周期に同期していることを利用し、運転時に自動的に誤差量を検出して補正している。
また、エンコーダによって検出される位置の検出精度を高めるために、特許文献2に記載された技術では、モータの回転むらに起因して発生するエンコーダの位置信号の誤差に対して、エンコーダから出力される原位置信号の検出値である位置データを補間し、その補間位置データに基づいて所望する回転位置とその位置に至るまでの時間との関係を得ている。
なお、特許文献2に記載された技術では、エンコーダの1回転内の位置データに応じた補正を行うものであるため、元信号の1周期に同期して発生する検出誤差を取り除くことは困難である。
前記近似誤差計算部は、前記検出誤差の近似曲線に基づいて、等間隔の位置における検出誤差を予め算出して記憶しておき、当該記憶された検出誤差間を直線で補間して任意の位置での検出誤差を求めてもよい。
[第1の実施の形態]
[構成]
図1は、本発明の一実施形態に係るエンコーダの信号処理装置Dの構成を示すブロック図である。
本実施形態においては、被測定体の移動に応じてエンコーダの感知部から出力される正弦波Sa、余弦波Sbの元信号をアナログ増幅回路1a,1bにて次段のアナログ−ディジタル変換回路2a,2bの入力に合うように増幅する。増幅されたアナログ信号をアナログ−ディジタル変換回路2a,2bで一定サンプリング周期毎にディジタル信号に変換する。変換されたディジタル値により、ディジタル内挿回路3が元信号1周期(正弦波1周期)内の位置を計算し検出誤差データ算出回路4に出力する。
ポジションデータ生成回路6は、補正された1周期内の位置データと、このブロック図では省略されている元信号の周期を数えているカウンタのデータより位置データを生成する。
ゼロクロスポイント検出回路413は、今回の位置データレジスタ411aと前回の位置データレジスタ411cに記憶する位置データより元信号Sa,Sbの1周期の開始であるゼロクロスポイントを検出する。
以上が本実施形態のエンコーダの信号処理装置Dの要部の構成である。
次に、この実施形態で実施する検出誤差補正の各種方法の実施形態を説明する。
D(m)=P(m)−[P(0)+L・m/n]
=P(m)−[P(0)+{P(n)−P(0)}×m/n]・・・(1)
として求められる。
3次曲線P(tX)=AtX 3+BtX 2+CtX+D・・・(2)
によって描画する例を示している。なお、式(1)において、A、B、C、Dは係数である。
図4に示すように、位置PX5〜PX8(検出点P(m−1)、P(m)間)においては、前後2点の検出点P(m−2)、P(m−1)、P(m)、P(m+1)を通過する3次曲線の係数を以下のように算出することができる。
図5に示すように、検出点P(m−1)を通過する時刻をt=0とすると、一定時間間隔Tの時点における検出点P(m−2)、P(m)、P(m+1)を通過する時刻は、それぞれ−T、T、2Tで与えられる。
したがって、4個の検出点P(m−2)、P(m−1)、P(m)、P(m+1)を通過する三次曲線P(t)=At3+Bt2+Ct+Dの係数A、B、C、Dに対し、以下の4式が成立する。
P(m−2)=−AT3+BT2−CT+D・・・(3)
P(m−1)=D・・・(4)
P(m)=AT3+BT2+CT+D・・・(5)
P(m+1)=8AT3+4BT2+2CT+D・・・(6)
A=(−P(m−2)+3P(m−1)−3P(m)+P(m+1))÷6T3・・・(7)
B=(P(m−2)−2P(m−1)+P(m))÷2T2・・・(8)
C=(−2P(m−2)−3P(m−1)
+6P(m)−P(m+1))÷6T3・・・(9)
D=P(m−1)・・・(10)
したがって、誤差量の速度成分変化、及び加速度成分変化を抑制し、モータのトルクコマンドへの影響を軽減することが可能となる。
なお、ここでは、検出点P(m−1)、P(m)間を例として係数を求めたが、他の検出点P(m−2)、P(m−1)間、あるいは、検出点P(m)、P(m+1)間においても、同様に前後2点の検出点から3次曲線の係数を算出し、任意の時刻での検出誤差を求めて位置データを補正することができる。
以上のように構成されるエンコーダの信号処理装置Dは、検出点間を直線で補間する場合に比べ、エンコーダの出力信号の誤差を補正する際に、トルクコマンドに影響を与える加速度成分の変動を抑制することができる。
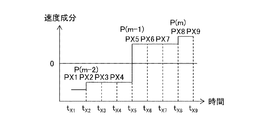
図6は、図4に示す位置データの例において検出位置を直線補間した場合を示す図である。
また、図7は、図6に示す位置データの例における各位置PX1〜PX9の速度成分を示す図、図8は、図6に示す位置データの例における各位置PX1〜PX9の加速度成分を示す図である。なお、図8に示す加速度成分は、図7に示す各時間の速度成分について隣接する時間との差分を示している。
図6においては、各検出点間は直線補間されるため、検出点間における検出位置は補間された直線上に分布することとなる。
この場合、検出点間における検出位置の速度成分は一定、加速度成分はゼロとなる。
また、図10は、図4に示す位置データの例における各位置PX1〜PX9の加速度成分を示す図である。なお、図10に示す加速度成分は、図9に示す各時間の速度成分について隣接する時間との差分を示している。
図4に示す位置データの例において、検出点間における検出位置は近似曲線上に分布することとなる。
この場合、各位置PX1〜PX9における速度成分は図9のような値となり、各位置PX1〜PX9における加速度成分は図10のような値となる。
同様に、各検出点間を直線補間した場合の加速度成分(図8)と、各検出点間を近似曲線で補間した場合の加速度成分(図10)とを比較すると、本発明のように各検出点間を近似曲線で補間した場合の加速度成分の方が、大きな変化が抑制されていることがわかる。
次に、本発明の第2の実施の形態について説明する。
第2の実施の形態では、エンコーダが逆回転する場合にも適切に位置データを補正可能とするため、第1の実施の形態に示す近似曲線の次数を奇数とするものである。
図11に示すように、近似曲線の次数が3次の場合、注目する時刻tXの前後4点の検出点を用いることで、3次曲線の係数A、B、C、Dを算出し、tm−1≦tX≦tmの範囲における任意の時刻での近似位置P(tX)を
P(tX)=AtX 3+BtX 2+CtX+D
として求めることができる。
また、逆回転の場合でも、順回転の場合と同一の前後4点の検出点を用いることになるため、近似曲線の係数は一意に定まる。
近似曲線の次数が2次の場合、注目する時刻tXより前の時刻tm−1の1点、及び、後の時刻tm、tm+1の2点の検出点を用いて、以下の式によって、2次曲線の係数A、B、Cを算出することができる。
A=(P(m−1)−2P(m)+P(m+1))÷2・・・(11)
B=(−P(m−1)+2P(m+1))÷2・・・(12)
C=P(m)・・・(13)
P(tX)=AtX 2+BtX+C・・・(14)
として求めることができる。
ところが、逆回転の場合、順回転と同様に、注目する時刻tXより前の時刻tm−1の1点、及び、後の時刻tm、tm+1の2点の検出点を用いると、異なる3点を通過する2次曲線の係数を算出することとなり、エンコーダが逆回転する場合には、適切に位置データを補正できない可能性が生じる。
すなわち、近似曲線の次数を奇数とすることで、より適切に位置データを補正することが可能となる。
次に、本発明の第3の実施の形態について説明する。
第3の実施の形態では、検出誤差の計算を簡略化し、処理を高速化するため、近似曲線における所定の検出誤差を予め算出して記憶しておくものである。
図13は、本実施の形態におけるM次曲線検出誤差計算回路52の構成を示す模式図である。
また、図14は、検出点を通過するM次曲線において、検出点を等分した時刻での検出誤差を予め算出する様子を示す模式図である。
そして、図14に示すように、M次曲線検出誤差計算回路52は、検出点間を等分した時刻でのM次曲線を通過する検出誤差を予め算出してレジスタ52aに格納しておく。
図14においては、検出点P(m−1)、P(m)間を時間Tで8等分し、各時刻t1〜t7におけるM次曲線上の近似位置P(1)〜P(7)が算出された例を示している。これら近似位置P(1)〜P(7)は、レジスタ52aに記憶されている。
例えば、図14における時刻t5、t6間の期間を直線補間して近似位置P(X)を算出する場合、近似位置P(5)、P(6)を用いて、
P(X)=(P(6)−P(5))×(tX−t5)÷T+P(5)・・・(15)
として求めることができる。
このように検出誤差を求めることで、任意の時刻におけるM次曲線上の検出誤差を逐次算出する場合に比べ、計算を簡略化し、処理を高速化することができる。
上述した各実施形態においては、検出誤差データ算出回路4中に開始条件判定回路41を設け、該開始条件判定回路41で判別してレジスタ群42へのデータ取り込み、及び基準データの算出指令を出力するようにしたが、この開始条件判定回路41を設けず、このエンコーダを取り付けた機械や装置を制御する数値制御装置等の制御装置によって、開始条件を判別し、この制御装置からデータ取り込み、及び基準データの算出指令を出力するようにしてもよい。
上述した各実施形態において、検出誤差データ算出回路4さらには検出誤差補正回路5をプロセッサで構成し、ソフトウェアによって処理を行うようにしてもよい。
図15は、検出誤差データの算出処理及び位置データの補正処理をソフトウェアによって実行する場合の構成を示すブロック図である。
ROM110には、エンコーダの信号処理装置Dを制御するための各種プログラムが予め書き込まれている。
RAM120は、DRAM(Dynamic Random Access Memory)等の半導体メモリによって構成され、プロセッサ100が各種処理を実行する際に生成されるデータを記憶する。
まず、基準データ作成指令が、手動若しくはこのエンコーダを取り付けた機械や装置を制御する制御装置からの指令として入力されたとき、プロセッサ100は、ディジタル内挿回路3から出力されるサンプリング位置データに基づいて、設定検出誤差算出開始条件を満たしているか否かを判別する。すなわち、現在の速度が規定値であるか、さらには、加速度が規定値内かを判別する(ステップa1)。
この位置データの取り込みが完了すると、1周期分の位置データが取り込み完了時での加速度が規定範囲内か判断する(ステップa4)。規定範囲からはずれている場合には、位置データを取得した1周期分内で速度変化があったことを意味するので、ステップa1に戻り再度位置データの取り込みを行う。
位置データの補正処理が開始されると、検出誤差補正回路5は、ディジタル内挿回路3の出力である位置データP(x)を読み(ステップb1)、M次曲線係数算出回路51は、検出誤差格納レジスタ44に格納された検出誤差の前後M+1点を通過するM次曲線の係数を算出する(ステップb2)。
次に、M次曲線補正計算回路53は、M次曲線検出誤差計算回路52によって算出された検出誤差を用いて、ディジタル内挿回路3から出力される位置データの検出誤差を計算し補正してポジションデータ生成回路6に出力する(ステップb4)。
この後、ポジションデータ生成回路6が、このように出力された補正後の位置データ(補正された1周期内の位置データ)と、元信号の周期を数えているカウンタのデータより位置データを生成する。
このような構成とすることで、検出誤差データ算出回路4さらには検出誤差補正回路5の機能をソフトウェアによって構成することができ、機能の追加あるいは変更等をより柔軟に行うことができる。
例えば、検出誤差補正回路5において、近似曲線として算出するM次曲線は、本発明の具体的な適用対象に応じて、その次数を適宜決定することができる。
また、位置データP(n)をサンプリングするサンプリング周期は、要求される近似曲線の精度等に応じて、適宜決定することができる。
また、これらのプログラムは、ネットワークを介してユーザのコンピュータにダウンロードされることにより配布されてもよい。
1a,1b アナログ増幅回路
2a,2b アナログ−ディジタル変換回路
3 ディジタル内挿回路
4 検出誤差データ算出回路
41 開始条件判定回路
42 レジスタ群
43 検出誤差計算回路
44 検出誤差格納レジスタ
45 平均化回路
5 検出誤差補正回路
51 M次曲線係数算出回路
52 M次曲線検出誤差計算回路
52a レジスタ
53 M次曲線補正計算回路
6 ポジションデータ生成回路
411a,411b,411c 位置データレジスタ
412a 第1の速度計算回路
412b 第2の速度計算回路
413 ゼロクロスポイント検出回路
414 加速度計算回路
415 位置データレジスタ格納開始判定及び誤差計算開始信号判定回路
100 プロセッサ
110 ROM
120 RAM
130 記憶部
Claims (8)
- 被測定体の移動に応じてエンコーダ内で発生するアナログ量である元信号から一定時間間隔毎に位置データを検出するエンコーダの信号処理装置であって、
前記エンコーダが発生する元信号の1周期内において、等間隔で取得された少なくとも3点以上の前記位置データに基づいて、検出位置の近似曲線を算出する近似曲線算出部と、
前記近似曲線算出部によって算出された前記検出位置の近似曲線に基づいて、任意の時刻における前記位置データの検出誤差の近似値を計算する近似誤差計算部と、
前記近似誤差計算部によって計算された前記位置データの検出誤差の近似値に基づいて、前記任意の時刻における前記位置データの検出誤差を補正する位置データ補正部と、
を備えるエンコーダの信号処理装置。 - 前記近似曲線算出部は、前記被測定体が所定値以内の速度変動分をもつ所定の速度範囲で移動している状態の時に、少なくとも3点以上の連続して検出された(n+1)個の位置データ群(n≧2)における両端の前記位置データの間を一定時間間隔で等分した時刻のうちの任意の時刻の前後(M+1)点の前記位置データ(M≧2)から、前記(M+1)点の範囲における任意の時刻での検出位置を近似する検出位置の近似曲線を算出し、前記(M+1)点の範囲における検出誤差を算出する請求項1に記載のエンコーダの信号処理装置。
- 前記近似曲線算出部は、前記検出位置の近似曲線として前記(M+1)点を通過するM次曲線を算出する請求項2に記載のエンコーダの信号処理装置。
- 前記M次曲線は奇数次である請求項3に記載のエンコーダの信号処理装置。
- 前記近似誤差計算部は、前記検出位置の近似曲線に基づいて、等間隔の位置における検出誤差を予め算出して記憶しておき、当該記憶された検出誤差間を直線で補間して任意の位置での検出誤差を求める請求項1から4に記載のエンコーダの信号処理装置。
- 被測定体の移動に応じて発生するアナログ量である元信号から一定時間間隔毎に位置データを検出するエンコーダであって、
当該エンコーダが発生する元信号の1周期内において、等間隔で取得された少なくとも3点以上の前記位置データに基づいて、検出位置の近似曲線を算出する近似曲線算出部と、
前記近似曲線算出部によって算出された前記検出位置の近似曲線に基づいて、任意の時刻における前記位置データの検出誤差の近似値を計算する近似誤差計算部と、
前記近似誤差計算部によって計算された前記位置データの検出誤差の近似値に基づいて、前記任意の時刻における前記位置データの検出誤差を補正する位置データ補正部と、
を備えるエンコーダ。 - 被測定体の移動に応じてエンコーダ内で発生するアナログ量である元信号から一定時間間隔毎に位置データを検出するエンコーダのための信号処理方法であって、
前記エンコーダが発生する元信号の1周期内において、等間隔で取得された少なくとも3点以上の前記位置データに基づいて、検出位置の近似曲線を算出する近似曲線算出ステップと、
前記近似曲線算出ステップにおいて算出された前記検出位置の近似曲線に基づいて、任意の時刻における前記位置データの検出誤差の近似値を計算する近似誤差計算ステップと、 前記近似誤差計算ステップによって計算された前記位置データの検出誤差の近似値に基づいて、前記任意の時刻における前記位置データの検出誤差を補正する位置データ補正ステップと、
を含む信号処理方法。 - 被測定体の移動に応じてエンコーダ内で発生するアナログ量である元信号から一定時間間隔毎に位置データを検出するエンコーダの信号処理装置を構成するコンピュータに、
前記エンコーダが発生する元信号の1周期内において、等間隔で取得された少なくとも3点以上の前記位置データに基づいて、検出位置の近似曲線を算出する近似曲線算出機能と、
前記近似曲線算出機能によって算出された前記検出位置の近似曲線に基づいて、任意の時刻における前記位置データの検出誤差の近似値を計算する近似誤差計算機能と、
前記近似誤差計算機能によって計算された前記位置データの検出誤差の近似値に基づいて、前記任意の時刻における前記位置データの検出誤差を補正する位置データ補正機能と、
を実現させるプログラム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016153817A JP6438441B2 (ja) | 2016-08-04 | 2016-08-04 | エンコーダの信号処理装置、エンコーダ、信号処理方法及びプログラム |
| CN201710647876.9A CN107687865B (zh) | 2016-08-04 | 2017-08-01 | 编码器的信号处理装置及其方法、编码器、记录介质 |
| DE102017213259.0A DE102017213259B4 (de) | 2016-08-04 | 2017-08-01 | Gebersignalverarbeitungseinrichtung, Geber und Signalverarbeitungsverfahren und Programm |
| US15/666,975 US10355717B2 (en) | 2016-08-04 | 2017-08-02 | Encoder signal processing device, encoder, and signal processing method and recording medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016153817A JP6438441B2 (ja) | 2016-08-04 | 2016-08-04 | エンコーダの信号処理装置、エンコーダ、信号処理方法及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018021845A JP2018021845A (ja) | 2018-02-08 |
| JP6438441B2 true JP6438441B2 (ja) | 2018-12-12 |
Family
ID=60996704
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016153817A Active JP6438441B2 (ja) | 2016-08-04 | 2016-08-04 | エンコーダの信号処理装置、エンコーダ、信号処理方法及びプログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10355717B2 (ja) |
| JP (1) | JP6438441B2 (ja) |
| CN (1) | CN107687865B (ja) |
| DE (1) | DE102017213259B4 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7075784B2 (ja) * | 2018-03-08 | 2022-05-26 | Dmg森精機株式会社 | エンコーダ |
| JP6649419B2 (ja) | 2018-03-26 | 2020-02-19 | ファナック株式会社 | エンコーダの信号処理装置、及びエンコーダ |
| CN109000702A (zh) * | 2018-05-16 | 2018-12-14 | 苏州汇川技术有限公司 | 编码器校正系统及方法 |
| CN111412939B (zh) | 2019-01-04 | 2022-05-17 | 台达电子工业股份有限公司 | 用于编码器的实时校正方法及其系统 |
| CN111238542B (zh) * | 2019-12-31 | 2022-12-13 | 扬州曙光光电自控有限责任公司 | 基于多对极编码器的位置环跨对极连续编码方法 |
| CN115400887B (zh) * | 2021-05-28 | 2025-02-14 | 青岛海特生物医疗有限公司 | 用于离心机转子识别的方法及系统 |
| CN115615458B (zh) * | 2022-09-09 | 2025-02-21 | 中国矿业大学(北京) | 隧道检测车载定位装置及融合定位方法 |
| CN116222639B (zh) * | 2022-12-08 | 2025-05-13 | 苏州伟创电气科技股份有限公司 | 基于编码器的校正处理方法、装置、设备及介质 |
| DE102022004942A1 (de) | 2022-12-28 | 2024-07-04 | Katrin Schnabel | Verfahren zum Schutz vor elektromagnetischer Strahlung in der Frequenztherapie |
| DE102023109587A1 (de) * | 2023-04-17 | 2024-10-17 | Schaeffler Technologies AG & Co. KG | Korrekturwertberechnung, Drehpositionskorrektur, Verfahren zum Betrieb eines Elektromotors und Elektromotor |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2097536A (en) * | 1981-04-24 | 1982-11-03 | Wolfendale Peter Caleb Frederi | Correcting transducer measurements |
| US4789948A (en) * | 1985-09-13 | 1988-12-06 | Hughes Aircraft Company | Method and apparatus for determining communications link quality and receiver tracking performance |
| JP2642959B2 (ja) | 1988-08-12 | 1997-08-20 | 鹿島石油株式会社 | 光学活性な含フッ素α−ヒドロキシシクロプロパン化合物 |
| JPH11249742A (ja) | 1998-03-02 | 1999-09-17 | Toshiba Corp | サーボモータ及びその位置検出方法 |
| JP2002116058A (ja) * | 2000-10-11 | 2002-04-19 | Yaskawa Electric Corp | エンコーダデータ変換回路 |
| JP4748559B2 (ja) * | 2001-09-14 | 2011-08-17 | 株式会社森精機製作所 | アブソリュートエンコーダ |
| JP3772121B2 (ja) * | 2002-02-28 | 2006-05-10 | ファナック株式会社 | エンコーダの信号処理装置 |
| JPWO2006043403A1 (ja) | 2004-10-20 | 2008-05-22 | 株式会社安川電機 | エンコーダ信号処理装置およびその信号処理方法 |
| KR100955549B1 (ko) * | 2005-11-28 | 2010-04-30 | 미쓰비시덴키 가부시키가이샤 | 위치 검출 오차 보정 방법 |
| JP4005096B2 (ja) * | 2005-11-29 | 2007-11-07 | ファナック株式会社 | エンコーダの信号処理回路 |
| TWI596444B (zh) * | 2006-08-31 | 2017-08-21 | 尼康股份有限公司 | Exposure method and device, and device manufacturing method |
| JP5145766B2 (ja) * | 2007-05-21 | 2013-02-20 | 株式会社Jvcケンウッド | 軟判定装置及び軟判定方法 |
| JP4824635B2 (ja) * | 2007-06-15 | 2011-11-30 | 株式会社 ソキア・トプコン | ロータリエンコーダの角度補正方法 |
| JP2009180522A (ja) * | 2008-01-29 | 2009-08-13 | Toshiba Corp | 角度検出装置の角度補正曲線取得方法及び角度検出装置 |
| JP5369635B2 (ja) | 2008-02-14 | 2013-12-18 | 日本精工株式会社 | 回転角度位置検出装置および回転角度位置検出方法、並びに回転角度位置検出装置を備えたモータ |
| JP5288859B2 (ja) * | 2008-03-31 | 2013-09-11 | 三菱電機株式会社 | 位置検出誤差補正装置および位置検出誤差補正方法 |
| JP5251960B2 (ja) | 2010-11-05 | 2013-07-31 | 株式会社安川電機 | エンコーダ、サーボユニット及び位置データ算出方法 |
| JP2012149924A (ja) * | 2011-01-17 | 2012-08-09 | Toyota Motor Corp | ロータリーエンコーダによる測定角度の誤差算出方法 |
| JP5836026B2 (ja) * | 2011-09-08 | 2015-12-24 | 三菱重工業株式会社 | 誤差周波数成分取得装置、回転角度取得装置およびモータ制御装置 |
| JP2013238431A (ja) * | 2012-05-11 | 2013-11-28 | Aisin Seiki Co Ltd | レゾルバ装置 |
| US9435644B2 (en) * | 2013-05-10 | 2016-09-06 | Schlumberger Technology Corporation | Digital compensation for non-linearity in displacement sensors |
| JP6423660B2 (ja) * | 2014-09-09 | 2018-11-14 | 東京エレクトロン株式会社 | ウエハ検査装置における検査用圧力設定値決定方法 |
-
2016
- 2016-08-04 JP JP2016153817A patent/JP6438441B2/ja active Active
-
2017
- 2017-08-01 CN CN201710647876.9A patent/CN107687865B/zh active Active
- 2017-08-01 DE DE102017213259.0A patent/DE102017213259B4/de active Active
- 2017-08-02 US US15/666,975 patent/US10355717B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20180041231A1 (en) | 2018-02-08 |
| JP2018021845A (ja) | 2018-02-08 |
| DE102017213259A1 (de) | 2018-02-08 |
| DE102017213259B4 (de) | 2024-09-19 |
| CN107687865A (zh) | 2018-02-13 |
| CN107687865B (zh) | 2020-01-03 |
| US10355717B2 (en) | 2019-07-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6438441B2 (ja) | エンコーダの信号処理装置、エンコーダ、信号処理方法及びプログラム | |
| JP3772121B2 (ja) | エンコーダの信号処理装置 | |
| US11722157B2 (en) | Methods, computer programs, devices, and encoders for signal error correction | |
| JP4602411B2 (ja) | 位置検出誤差補正方法 | |
| JP2019091439A5 (ja) | 画像データ補間の方法 | |
| JP7381707B2 (ja) | 検出装置、方法、システム、算出装置、および算出方法 | |
| CN116182924B (zh) | 相位补偿方法、装置以及磁编码器 | |
| JP4940411B2 (ja) | アナログ角度センサ精度補正プログラム、補正方法、記録媒体およびサーボドライバ | |
| CN114440866A (zh) | 一种传感器数据校准方法及校准系统 | |
| JP2020012634A (ja) | ロータリーエンコーダ信号処理装置及びその信号処理方法 | |
| JP6825260B2 (ja) | 速度検出装置および速度制御システム | |
| CN113804914B (zh) | 电机测速方法、装置、计算机设备和存储介质 | |
| JP6719684B1 (ja) | 数値制御装置 | |
| US20200218226A1 (en) | Instant correction method for encoder and system thereof | |
| JP6649419B2 (ja) | エンコーダの信号処理装置、及びエンコーダ | |
| JP2003035566A (ja) | 補正機能付き絶対位置検出器 | |
| JP4518871B2 (ja) | 内挿誤差補正方法及び装置 | |
| JP2003262649A (ja) | 速度検出装置 | |
| CN120890446A (zh) | 六轴imu的姿态解算方法、装置、设备及存储介质 | |
| JPH05332788A (ja) | ロータリーエンコーダのデータ処理装置 | |
| KR101891276B1 (ko) | 속도 제어 장치 | |
| CN116953658A (zh) | 一种数据处理方法、装置及存储介质 | |
| WO2020208766A1 (ja) | 電動機の制御装置 | |
| CN119171886A (zh) | 编码器的脉冲输出电路、方法、驱动器和存储介质 | |
| JP2020046708A (ja) | サーボ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180727 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180807 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181004 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181023 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181116 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6438441 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |