以下、添付図面を参照しつつ本発明の第一ないし第七実施形態装置について説明する。
<第一実施形態装置>
第一実施形態装置は、ソーセージSをループSLに形成して懸吊部材としてのフック22に吊下するソーセージループ吊下装置10と、ソーセージループ吊下装置10に設けられた竿へのソーセージループ吊下位置決め装置1と、ソーセージループSLを吊下した竿Tをソーセージループ吊下装置10から搬出する搬出コンベア60と、搬出コンベア60から移された竿Tを載せて、順次、次工程へ向け(図1(B)にて矢印B方向)搬送する竿集積コンベア70を備えている。
以下に、ソーセージループ吊下装置10、竿へのソーセージループ吊下位置決め装置1、搬出コンベア60、そして竿集積コンベア70について、順次説明する。
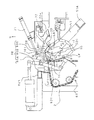
ソーセージループ吊下装置10は、ソーセージの内容物たる練状肉類をケーシングに対し充填し、これにひねりを加えて連結部SCを形成した多数のリンクLが連なったソーセージSとして搬出するソーセージ供給装置(図示せず)に連設されているコンベア20を備えている。コンベア20は、移動するチェーンあるいはベルトの形態の巻き掛け移動体21に所定ピッチPTで取付けられた複数のフック22がリンク状ソーセージSの供給を受けて、該複数のフック22に順次ソーセージループSLを形成して吊り下げるようになっており、図1(A)がその正面図、図1(B)が平面図である。
図1(A)、図1(B)において、コンベア20は、平面図である図1(B)にて、右方(矢印A方向)へ直動しながら循環する無端の巻き掛け移動体21と、後述する竿掛止腕体51の上昇移動中に、ソーセージループSLを竿Tに吊下するために図3(C)に示す後方Rへ所定角の回動動作を行うようになっているフック22とを有している。ここで、この巻き掛け移動体21の右方への直動する範囲での矢印Aの移動方向を「下流方向」と呼ぶこととする。
尚、図1(B)は、竿へのソーセージループ吊下位置決め装置1の装置構成を明示するために、後述の直動域における、竿へのソーセージループ吊下位置決め装置1に重なる範囲のコンベア20と装置本体11とを省略した図であり、図1(A)は同じくそれらを省略した図である。
上記フック22は、後述する竿上昇移動装置50が配設されている場所まで下流方向Aへ移動すると、ブラケットに固定された軸22Aまわりに往復回動可能になっており、竿掛止腕体51の上昇移動中に、フック22のリンク吊下部22aから吊り下げられているソーセージループSLをフック22から外して竿Tに受け渡すために、二点鎖線で図示されたフック22の位置迄、後方Rへ所定角の回動動作を行うようになっている(図3(C)参照)。
図3(C)に見られるように、フック22は上記軸22Aの位置から立ち上がる作動ピン22Bが設けられており、該作動ピン22Bは、後方Rに配されたシリンダ27のロッド27Aに設けられ図3(C)にて紙面に対し直角方向に延び上記ロッド27Aの先端に取り付けられた押進部材26により前方Fへ押されて、複数のフック22の作動ピン22Bが一括して回動するようになっている。
本第一実施形態装置のソーセージループ吊下装置10は、図1(B)に見られるように、後述の竿支持装置30(図1(B)参照)へ竿Tを供給する竿供給装置40、竿支持装置30にて支持された竿Tを竿支持装置30から受け取って上昇移動する竿上昇移動装置50を備えており、これら装置30,40,50は上記コンベア20とともに上記装置本体11に設けられている。装置本体11には上記竿へのソーセージループ吊下位置決め装置1の基体2が接続されている。
竿支持装置30は、巻き掛け移動体21の直動域の範囲に位置していて、竿支持部材32が設けられている。該竿支持部材32は、図1(B)そして図3(A)に見られるように、竿Tを定位置で下方から支持しており、竿Tの前部(下流方向端部)を支持する竿前部支持部材32Aと竿Tの後部を支持する竿後部支持部材32Bとを有している。
竿上昇移動装置50は、既述した竿支持装置30の腕状の二種の竿支持部材32A,32Bに支持されている竿Tに対して竿の長手方向で竿Tの両端部に対応して位置している二つの腕状の竿掛止腕体51、各竿掛止腕体51の上端に回動自在に取り付けられ所定時に回動駆動を受ける竿掛止鉤部材52とを有し、二つの竿掛止腕体51は、それらの下部にて、連結部材51Aにより連結されている。連結部材51Aは前・後2個のボックス51B,51B内に設けられた図示しない駆動/ガイド装置に接続されている(図1(B)参照)。
上記竿掛止腕体51は、図3(A)に見られるように、その上端上縁に切欠部として形成された竿掛止部51aを有しており、該竿掛止腕体51がその長手方向に矢印P方向に上昇移動(図3(A)にて左上に向けた傾斜上昇移動)すると、竿掛止部51aがその最上位置HP(図3(D)参照)にまで達する過程で、竿支持部材32で支持されている竿Tを下方からもち上げるようにして竿支持部材32から取り出し、上記最上位置HPに至る間に、上述したフック22の後方Rへの回動動作と協働して、上記竿Tでフック22からソーセージループSLを取り出す。フック22から取り出されたソーセージループSLは、連結部SCを介して隣接した最上前側リンクLF1と最上後側リンクLR1が竿Tに係合した状態で竿Tに吊下される(図3(D)参照)。
竿掛止腕体51の上端部に回動自在に取り付けられた竿掛止鉤部材52は竿掛止腕体51が最下位置にあるときの該竿掛止腕体51の切欠部としての竿掛止部51aとほぼ一致する位置そして形状の竿掛止フック部52Aが形成されており(図3(A)参照)、該竿掛止腕体51が最上位置HPに達する途中で、該竿掛止鉤部材52が基体2に固定された傾斜ブロック状の竿上昇カム52Cに当接する。竿掛止鉤部材52は、その後の最上位置HPまでの竿掛止腕体51の上昇移動と該竿上昇カム52Cとの協働により回動駆動を受けて、上昇移動しながら上記竿掛止フック部52Aを回動中心52A−1まわりに反時計方向へ回動させ、最上位置HPにてその回動が完了する。竿掛止鉤部材52のこの回動によって、ソーセージループSLを吊下した竿Tが最上位SHまで移動する(図3(D)参照)。
上記ソーセージループ吊下装置10の前方Fに、図1(B)そして図3(A)に見られるように、竿の長手方向で対をなして設けられた上記二つの竿掛止腕体51に対応して位置する一対の竿受部材105を有する竿へのソーセージループ吊下位置決め装置1が配置されている。竿受部材105は最上位置HPにおける竿掛止腕体51に対応して位置するように基体2に固定されており、最上位置HPに達した竿掛止腕体51から後述の竿移行装置100によって移行された竿Tを、その両端を受け止めて載せる竿載置部105Aを有している。
上記竿受部材105の前方近傍には、図1(A)そして図3(A)に見られるように、基体2に設けられた縦方向・下方Dに竿Tを搬送する搬出コンベア60が配設されている。該搬出コンベア60は、竿の長手方向で対をなして設けられた上記二つの竿受部材105に対応して位置する受取りチェーン61を有している。該受取りチェーン61は、図3(A)に見られるように、スプロケット62A,62B,62C、そして最下位にあり図示されていないスプロケットの計四つのスプロケットにより循環路を形成するように張設されており、最上位のスプロケット62Cと最下位のスプロケットの間を走行する下降移動域の上端が竿受部材105に対応して位置している。上記受取りチェーン61には、竿受部材105上から竿Tを受け取って下降移動するL字状の鉤部61Aが、ソーセージのループSLの長さよりも大きい間隔で二箇所に設けられている。
上記搬出コンベア60の下方Dには、図1(A)、図1(B)に見られるように、該搬出コンベア60からの竿Tを受けこれを次工程装置へ向け搬送する竿集積コンベア70が位置している。竿集積コンベア70は、搬出コンベア60が縦方向であるのに対し横方向となっており、図1(B)において、竿集積コンベア70の搬送チェーン71の搬送方向は矢印Bのごとく、コンベア20の直動域での移動方向である矢印Aに対して直角方向をなしている。
次に、竿へのソーセージループ吊下位置決め装置1に関して説明をする。
従来、ソーセージループ吊下装置10においては、矢印P方向へ上昇移動する竿Tによって、竿Tに係合した前側リンクLF1と後側リンクLR1とを上昇移動させ、それによって後側リンクLRをフック22から引き出すことによってループSLをフック22から取り出すようになっている。しかし、フック22から引き出される後側リンクLRに対するフック22の制動力が大きいと、後側リンクLRがフック22から引き出されにくくなる。その結果、図10(A),(B)に見られるように、上昇移動する竿Tに係合した後側リンクLR1が竿Tと共に移動できなくなり、後側リンクLR1に繋がった前側リンクLF1は上昇移動する竿Tによって押し上げられて連結部SCを中心に矢印C方向へ振られることによって、竿Tのみが上昇移動してしまうということがある。このようにフック22からの制動を原因として、竿Tに係合した前側リンクLF1と後側リンクLR1の竿Tに対する係合位置にずれを生じ、その結果、竿Tに吊下されたループSLの長さがばらついたり、ループSLがフック22から取り出されないという不具合を生じることがある。
そこで、本第一実施形態装置では、ソーセージループ吊下装置10に第三発明に係る実施形態である竿へのソーセージループ吊下位置決め装置1が設けられており、図1(A)、図1(B)に見られるように、竿へのソーセージループ吊下位置決め装置1は、フック22からソーセージループSLを取り出すために上昇移動中の竿Tに係合した後側リンクLR1の竿Tに対する係合位置のずれを防止する上部規制部材80と、同じく上昇移動中の竿Tに係合した前側リンクLF1の竿Tに対する係合位置のずれを防止する前部規制部材91とを備えている。
また、上記上部規制部材80は、フック22からループSLが取り出された後の竿Tに係合した後側リンクLR1に接触して、竿Tに対する後側リンクLR1の係合位置のずれをも防止する。
さらには、竿へのソーセージループ吊下位置決め装置1は、上部規制部材80との接触によって竿受部材105への移動を阻害されるソーセージループを吊下している竿Tを、竿受部材105へ円滑かつ確実に移行するための竿移行装置100をも有している(図2(A)、図2(B)参照)。
図1(A),(B)に見られるように、竿へのソーセージループ吊下位置決め装置1をなす上記上部規制部材80と前部規制部材91は、竿の長手方向での多数のソーセージループSLの吊下範囲にわたり位置し、これに対し竿移行装置100の竿移行部材101は、図2(B)に見られるように、上部規制部材80そして前部規制部材91の両端より外側に位置している。上部規制部材80と、前部規制部材91を有する後述の前部規制装置90と、竿移行装置100は拡大して図2(A),(B)に示されている。
上部規制部材80は静止部材として形成されて基体2に取り付けられている(図2(B)参照)。上部規制部材80は、図3(D)に見られるように、竿掛止腕体51が上昇移動して最上位置HPに達したときの該竿掛止腕体51の上端の上方Uに位置している。該上部規制部材80は、金属板等の板状部材を屈曲して作られていて、上記ソーセージループSLの吊下範囲にわたり(図3(D)にて紙面に直角方向に)延びている。該上部規制部材80は、基体2に取り付けられる基部80A、変向部80B、並行部80Cとを有している。先端側に位置する並行部80Cは、図3(C)に見られるように、上記竿掛止腕体51の上昇移動方向Pに延びており、竿Tに吊下されるソーセージループSLをなす前側リンクLFと後側リンクLRのうちの該後側リンクLRの最上後側リンクLR1が最上位SHまで移動している最中に、該最上後側リンクLR1が接触するように設けられている。上部規制部材80の全表面が後述の接触面80fを構成する。このように上部規制部材80は、竿Tを掛止した状態で前方Fへ向って矢印P方向へ上昇移動中の竿掛止腕体51に沿って、該竿Tよりも上方Uの位置に設けられている。
変向部80Bは、上記並行部80Cから向きを変えていて、該並行部80Cの上端から左方へ向け若干下方に傾斜して形成されて、基体2に取り付けられた上記基部80Aの下端に接続されている。該変向部80Bは、竿の長手方向で竿Tの両端位置に設けられた二つの受取りチェーン61の間にあって、図3(D)に見られるように、搬出コンベア60の最上位のスプロケット62Cに隣接して配設された竿受部材105に向って延びている。該変向部80Bは、最上位SHに到達した竿Tに係合した前側リンクLF1が、あるいは前側リンクLF1と後側リンクLR1の両リンクが接触もしくは至近するように設けられている。
上部規制部材80は、金属板等の薄い板材で作られた単純形状の部材であるので、構造が簡単で廉価な規制装置となる。本例では、上部規制部材80は可動部のない構造であるが、上部規制部材80の高さ位置調整をはじめとした所望目的のために、可動部を有した構造にして、基体2に取り付けることもできる。
上記上部規制部材80に加え、本第一実施形態装置では、図1(A),(B)、図2(A),(B)、図3(A)に見られるように、前部規制部材91を備えた前部規制装置90が設けられている。該前部規制装置90は、ソーセージループSLの前側リンクLFに接触することによって、上昇移動している竿Tに係合した前側リンクLF1の矢印C方向の振れ(図10参照)を規制して竿Tに対する係合位置のずれを防止する前部規制部材91を備えている。前部規制装置90は、更に、該前部規制部材91を取り付けている回動腕92、該回動腕92を回動する回動軸93、そして該回動軸93を回動軸線AXまわりに回動駆動するシリンダ装置94を有している。
上記回動腕92は、竿の長手方向に延びる回動軸93に固定的に取り付けられていて該回動軸93と一緒に回動するようになっており、回動軸93から上方Uに延びる上回動腕92Aと下方Dに延びる下回動腕92Bとを有している。該回動軸93は図1(A),(B)にて左右に、図3(A)にて紙面に対し直角方向に延びていて上記前部規制部材91の全幅の範囲に及んでいる。上記回動軸93は、図2(A),(B)に見られるように、その長手方向の複数位置(図2(B)では四箇所)で基体2に取り付けられた軸受部材95により回転自在に支持されている。該軸受部材95は、取付部材96を介して基体2により支持されている。
シリンダ装置94はシリンダ本体94Aとシリンダロッド94Bを有し、シリンダ本体94Aが上記回動軸93の長手方向中央位置で基体2に取り付けられていて、竿掛止腕体51が最上位置HPまで達したときの該竿掛止腕体51の上端よりも上方Uに位置しており、シリンダロッド94Bは前後方向(矢印F方向と矢印R方向)にストローク移動する。上記シリンダロッド94Bの先端には、上回動腕92Aの上端が回転自在に連結されており、該上回動腕92Aの下端が回動軸93に取り付けられている。該回動軸93には、該回動軸93の長手方向の複数位置(図2(B)では端部寄りの二箇所)で、下回動腕92Bの上端が取り付けられており、これらの下回動腕92Bの下端が取付部材97を介して上記前部規制部材91に取り付けられている。すなわち、回動軸93の長手方向に延びる前部規制部材91を、同方向での二箇所で下回動腕92Bにより支持している。かかる構成により、上記前部規制部材91は、シリンダ装置94のシリンダロッド94Bの出没動作によって、上記上回動腕92A、回動軸93、下回動腕92Bさらには取付部材97を介して上記回動軸93まわりの回動を行う結果、後述の第1位置PS1と第2位置PS2の間を前後に往復回動するようになる。
上記前部規制部材91は、上記シリンダ装置94の作動にもとづく回動軸93まわりの回動腕92(上回動腕92A及び下回動腕92B)の回動により、竿掛止腕体51に掛止されて前方Fへ矢印P方向へ上昇移動する竿Tの当接を受けて持ち上げられたソーセージリンクLに前部規制部材91の斜部91Aが接触可能とする第1位置PS1(図3(B)に示される位置)と、該第1位置PS1よりも前方Fにあって、受取りチェーン61の鉤部61Aに支持された竿Tに吊下されたソーセージループSLと斜部91Aとの接触回避を可能とする第2位置PS2(図3(E)に示される位置)との間を上記回動軸93の回動軸線AXを中心に往復回動する。上記第1位置PS1は、シリンダ装置94のシリンダロッド94Bの没入時に、そして第2位置PS2は該シリンダロッド94Bの最突出時に得られる。
図3(B),図3(C)を参照して、上記第1位置PS1はループSLを吊下しているフック22のリンク吊下部22aから前方F、かつリンク吊下部22aから下方Dにある所定な位置であり、上記前部規制部材91は、第1位置PS1にある状態で、第1位置PS1上にある基点部91Pから竿掛止腕体51の移動方向Pに延びる前部規制傾斜部としての斜部91Aと、上記基点部91Pから縦方向・下方Dに延びる縦部91Bとを有している。回動軸93の回動軸線AXは、上記基点部91Pよりも上方Uに配設されており、斜部91Aの略延長線上に位置している。上記斜部91Aは第1位置PS1にて、上記上部規制部材80の並行部80Cと対面して、該並行部80Cが最上位の後側リンクLR1に上側で接触して該最上位の後側リンクLR1の振れを規制するのに対し、斜部91Aは下側で前側リンクLFに接触して、竿Tに係合した前側リンクLF1の矢印C方向の振れ(図10参照)を規制する。更に、上記縦部91Bが、第1位置PS1にて前側リンクLFに接触し、この接触によっても上記最上リンクLF1の振れを規制する。このように、前部規制部材91は斜部91Aと縦部91BのリンクL側の全面が接触面91fを構成する。
このように、竿へのソーセージループ吊下位置決め装置1では、上部規制部材80と、上部規制部材80から所望の対向間隔FFで対向している前部規制部材91との間を、リンクLが係合した竿Tを上昇移動させるので、竿Tに係合した両リンクLF1、LR1は、竿Tの上昇移動中、連結部SCを中心に折り曲げられ形態が保たれて、竿Tと一体的に上昇移動をする。
本第一実施形態装置は、ソーセージSのリンク長さやリンク太さに応じた前部規制部材91によるリンクLの振れの規制をするために、第1位置PS1にある前部規制部材91が第2位置PS2へ向かう前方Fへの回動を開始する時期を変更するようになっている。上昇移動する竿掛止腕体51の高さ位置に対して回動開始時期を変更することによって、上昇移動する竿Tがフック22に吊り下がっているソーセージループSLに当接した時点において、前部規制部材91が第1位置PS1上にあるか、それとも第1位置PS1よりも前方Fの位置をすでに回動中であるかの選択ができるようになっている。更に、前部規制部材91の前方Fへの回動開始は、竿掛止腕体51が上昇移動中もしくは最上位置HPに到達してからのいずれかの時期を選択できるようになっている。
上記前部規制部材91は、薄い金属等の板状部材で作られているので、回動軸93まわりの往復回動動作において、前部規制部材91を早い速度で軽く動かすことができる。又、前部規制部材91が、格子構造や網目構造などの非全閉状板で作られると、前部規制部材91の前方Fの場所から前部規制部材91を通して、ソーセージループ吊下げ装置10の作動状況を確認できるので、高精度な装置調整が可能となる。同様の目的のために透明プラスチック製の前部規制部材91を用いることもできる。
次に竿移行装置100について説明する。上記前部規制部材91を回動するための回動軸93には、図2(A),(B)に見られるようにその軸端に竿移行部材101が取り付けられていてシリンダ装置94により回動駆動される回動軸93と一体的に回動する。上記竿移行部材101、回動軸93そしてシリンダ装置94が竿移行装置100を構成する。
上記竿移行部材101は、最上位置HPにきた竿掛止腕体51により掛止されている竿T、換言すると竿掛止腕体51が有する竿掛止鉤部材52により掛止されている竿Tよりも上方Uに位置していて、下向きの鉤状をなしている。図3(D)では、シリンダロッド94Bは没入位置から最突出位置に向けた途中位置にあり、竿移行部材101が上記最上位SHに位置している竿Tを前方Fに配置されている竿受部材105に向けて移行を開始している状態にある。上記竿移行部材101は、シリンダロッド94Bが没入した図3(C)の位置、すなわち前部規制部材91が第1位置PS1にあるときに、上部規制部材80の上方Uに回動した待機位置WPにあり、上記シリンダロッド94Bが最突出した図3(E)の位置、すなわち前部規制部材91が前方Fへ回動して第2位置PS2に達したとき、竿Tを前方Fへ引き出して竿受部材105上へ移行させる作動が完了する。このように前部規制部材91と竿移行部材101とは、同じ角度で回動する。第2位置PS2の前部規制部材91は竿受部材105上の竿Tに吊下されたソーセージループSLから前方Fに離れた状態で停止する。
また、上記前部規制部材91は、竿受部材105に移行されたソーセージループを吊下した竿Tを搬出コンベア60で縦方向に移送することによって該竿をソーセージループ吊下装置10から竿を集積して搬送する竿集積コンベア70へ向け搬出するに際して、縦方向・下方Dに移送されるループSLとの接触を回避するために第2位置PS2上に待機しているようになっている。
また、ソーセージループ吊下装置10は、竿へのソーセージループ吊下位置決め装置1が竿受部材105を設けることなく、竿移行装置100が竿掛止腕体51からの竿Tを搬出コンベア60の鉤部61Aに移行させる構成をとることもできる。この構成においては、鉤部61Aが本発明の竿受部材に相当する。
上述したように第一実施形態装置は前部規制部材91と竿移行部材101とを同一の回動軸93に取り付けて、一つのシリンダ装置94によって往復回動させるので、簡潔な構造となる。
このように構成される本実施形態装置において、竿掛止腕体51により上昇移動過程で、竿支持部材32上の竿Tを該竿掛止腕体51の竿掛止部51aで掛止し、竿掛止腕体51のさらなる上昇移動によるその後の竿Tの上昇移動でフック22からソーセージループSLを取り出し、しかる後に竿Tを搬出コンベア60へ受け渡す。以下、その動作について説明する。
(1)図3(A)にて、シリンダ装置94のシリンダロッド94Bが最突出していて、前部規制部材91は前方Fの第2位置PS2にて停止しており、竿掛止腕体51は竿後部支持部材32Bより下方Dに位置していて、ソーセージループSLはコンベア20のフック22に吊下されている。
(2)次に、図3(B)に見られるように、シリンダロッド94Bが没入し、前部規制部材91は後方Rの第1位置PS1にきている。この図3(B)の状態では、前部規制部材91が第1位置PS1にあるが、竿掛止腕体51は依然として下方Dに位置しているので、フック22で吊下されているソーセージループSLに対し上記前部規制部材91は接触していない。しかし、前方Fへの広がりが大きいソーセージループSLを吊り下げている場合には、前部規制部材91の縦部91BはソーセージループSLに接触する。
(3)次に、シリンダロッド94Bが図3(B)と同じ位置に停止し、したがって前部規制部材91が第1位置PS1に留まった状態で竿掛止腕体51が上昇する。該竿掛止腕体51は、既述したように、その上昇移動過程で、竿支持部材32上の竿Tを該竿掛止腕体51の竿掛止部51aで掛止して取り出し、その後の竿Tの上昇移動で、竿Tがフック22に吊り下がったソーセージループSLに当接する。上記の当接をした後に、図3(C)に見られるように、前側リンクLFの最上リンクLF1は、ループ形状を変えて前部規制部材91の斜部91A上へ移動してゆく。該最上リンクLF1は、連結部SCを中心にした矢印C方向の振れ(図10参照)を斜部91Aとの接触によって規制された状態で、図3(D)に示された最上位SHまで上昇移動する。
一方、上昇移動する竿Tに押される最上後側リンクLR1は、前側リンクLFの上昇移動に対する斜部91Aによる制動が原因となって、連結部SCを中心に上方Uへ振られようとするが、上部規制部材80との接触でその振れが規制される。上記最上リンクLR1は並行部80Cに接触した状態で該並行部80Cと並行する方向に最上位SHまで移動していく。竿掛止腕体51の上昇移動中にシリンダ27が作動して、複数のフック22を一括して後方Rへ回動させて(図3(C)参照)、ソーセージループSLをフック22から外して竿Tに吊下する。
(4)竿掛止腕体51が最上位置HPに達した時点で、図3(D)に見られるように、没入していたシリンダロッド94Bが最突出位置方向に移動中であり、上記竿移行部材101が最上位SHにある竿Tを竿掛止鉤部材52から移行させ始めている。前部規制部材91は前側リンクLFから前方Fへ離反するので(図3(E)参照)、前部規制部材91はループSLを吊り下げた竿Tの移行の障害にならない。
(5)さらに、シリンダロッド94Bが最突出位置にくると前部規制部材91は第2位置PS2で停止する。竿移行部材101の回動により、竿Tは前方Fへ移動し、竿受部材105へ受け渡される。該竿受部材105の竿載置部105Aは斜面をなしていて最下部位が切欠部となっている。竿Tは竿載置部105Aの斜面を滑落するようになっているが、図3(E)に見られるように、竿Tは、竿受部材105の上記切欠部の中に待機している鉤部61Aによって上記滑落が防止されて、竿載置部105Aの上に留まる。
この時点で受取りチェーン61が循環移動を開始して鉤部61A(図3(E)参照)が下降しはじめる。下降する鉤部61Aが竿Tから離れた後に、上記切欠部で竿受部材105から落下する竿Tは鉤部61Aに受け止められ、搬出コンベア60の下降移動域を下方Dへ移動する。上記鉤部61Aが下降移動域の下端にまで達すると、竿Tは上記鉤部61Aから落下し、竿集積コンベア70上に移されて、該竿集積コンベア70により次工程装置へ搬送される。
第一実施形態装置の動作に関する以上の説明のように、竿上昇移動中にフック22からのループSL取り出しを完了するので、竿掛止腕体51の上昇移動停止時には、後側リンクLRに対するフック22による後方Rへの引っ張り作用が解除されており、上記停止時に先方Qへの後側リンクLR飛び出しが起きやすい状況にある。が、上部規制部材80が、そのリンク飛び出しを防止する。
この場合においては、上部規制部材80はフック22による後方Rへの引っ張り作用が解除されている後側リンクLR1の竿Tとの係合位置のずれをも防止するものであるので、フック22からのループSL取り出し過程において、後側リンクLRに対するフック22による後方Rへの引っ張り作用を原因とした後側リンクLR1と竿Tとの係合位置ずれを発生しない装置に対しても、本発明の上部規制部材を適用できて効果を得るものである。
上記した後側リンクLRに対するフック22による後方Rへの引っ張り作用を原因としたリンクLと竿Tとの係合位置ずれを発生しない装置にあっては、竿掛止腕体51の上昇移動の過程で、竿掛止腕体51の上端に形成された竿掛止部51aにより取り上げられた竿Tに係合した最上後側リンクLR1は、並行部80Cとの接触によって規制されて上方Uへ飛び上がることがなく、また該移動方向先方Qへも飛び出すことがない。
<第二実施形態装置>
図4に示される第二実施形態装置では、第一発明に係る実施形態である竿へのソーセージループ吊下位置決め装置1Aを備えており、本位置決め装置1Aは、第一実施形態装置に備えられた竿へのソーセージループ吊下位置決め装置1から前部規制装置90を除去した形態をなしている。
前部規制装置を有していない本実施形態装置は既述の竿移行装置100を有しており、シリンダ装置94で回動駆動される回動軸93に取り付けられているのは竿移行部材101のみである。
かかる本竿へのソーセージループ吊下位置決め装置1Aでは、図4に見られるように矢印P方向へ上昇移動する竿掛止腕体51により、竿Tに係合した後側リンクLR1が並行部80Cに接触した状態で最上位SH(図3(D)参照)へ向って移動して行く。
竿へのソーセージループ吊下位置決め装置1Aでは、フック22からの制動力の作用に基づく竿Tに対するループSLの位置ずれを、上部規制部材80のみによって防止するので、最上後側リンクLR1への竿Tの上昇力の伝達をより確かのものにするために、上部規制部材80は、後側リンクLR1の竿Tとの係合箇所に凹部Zが形成されるような強い押し付けでもって後側リンクLR1に接触している。又、竿Tからの上記伝達を更により確かにするために、リンクLとの摩擦抵抗を極力抑えられる材質や形状からなる接触面80fを有した上部規制部材80を用いることができる。
しかる後、竿掛止腕体51のさらなる上昇移動により竿掛止腕体51が最上位置HPにまで達すると、第一実施形態装置と同じく、竿掛止鉤部材52が竿上昇カム52Cとの当接による回動を完了する。竿掛止鉤部材52の回動によって、上記最上後側リンクLR1は、上部規制部材80の変向部80Bに接触しながら移動し、竿Tから先方Qへ飛び出すことはない。竿移行部材101の作動により、竿掛止鉤部材52上に載っている竿Tは竿移行部材101によって竿掛止鉤部材52から押し出されて、確実に竿受部材105へ受け渡される。
第二実施形態装置は、フック22から後側リンクLRに作用する制動力が小さく、かつ、竿Tに係合した前側リンクLF1が上昇移動する竿Tによって押されても、連結部SCを中心に矢印C方向(図10参照)へ振られにくいソーセージSに対して、より具体的には、巻き掛け移動体21に所定ピッチPT(図2参照)で取付けられた、隣接した2個のフック22,22の間に形成された空間よりもソーセージSの太さが細く、そして長いリンクLからなる長いループSLを吊るす場合に適用すると良い。第二実施形態装置は前部規制装置を省略することで、第一実施形態装置に比し装置を簡単化できる。
<第三実施形態装置>
図5に示される第三実施形態装置では、第一発明に係る実施形態である竿へのソーセージループ吊下位置決め装置1Bを備えており、第二実施形態装置と比較すると、竿へのソーセージループ吊下位置決め装置1Bは、上部規制部材80が変向部を備えていないこと、竿移行装置を備えていないこと以外は、第二実施形態装置と同じである。ソーセージSのリンクLが大きく、ループSLも長い場合、竿Tが最上位SHで停止した時に最上後側リンクLR1が先方Qへ飛び出すことを考慮しなくともよいので、第二実施形態装置のような変向部と竿移行装置は備えておらず、上部規制部材80が基部80Aから延びる先端側に並行部80Cを有しているのみに特徴がある。
このような第三実施形態装置では、前述した第二実施形態装置と同じく、竿Tが図5のように竿掛止腕体51の矢印P方向への上昇移動により後側リンクLRの竿Tに係合した最上位のリンクLR1は上記並行部80Cに接触した状態で最上位SHへ向って並行部80Cに沿って移動して行き、また、変向部を有していないので、最上位SHに到達した竿の竿受部材105への移行の際に、変向部による前側リンクLF1と後側リンクLR1への抵抗を受けることもないので、竿移行部材を備えていなくとも、竿掛止鉤部材52の回動により、図5に見られるように、竿掛止フック部52Aが竿受部材105の領域内にまで回動することなく、竿Tは竿掛止鉤部材52から竿受部材105へ移行する。
<第四実施形態装置>
図6に示される第四実施形態装置は、第二発明に係る実施形態である竿へのソーセージループ吊下位置決め装置1Cがソーセージループ吊下装置10に設けられており、第一実施形態装置に比し、竿へのソーセージループ吊下位置決め装置1Cが上部規制部材と竿移行装置とを有さずに、前部規制装置90のみを有している点に特徴がある。
本第四実施形態装置の前部規制装置90は第一実施形態装置の前部規制装置90と同じであるが、本装置の前部規制部材は上部規制部材に対向していない構成であるので、以下に、主に前部規制傾斜部の構成と作用効果に関した説明をおこなう。
第1位置PS1上の前部規制部材91において、基点部91Pはフック22の前方Fに隣接して、フック22のリンク吊下部22aよりも下方Dに位置するように配されている。斜部91Aはその傾斜方向の全域において、竿上昇移動路URに対する直交線と交差する接触面91fを有し、接触面91fはフック22より前方Fにある上記竿上昇移動路URに対向するように竿上昇移動路URの前方Fに配されている。斜部91Aが竿上昇移動路URに沿って配されているので、竿Tが上昇移動しているにも拘らず、上昇移動する竿Tと斜部91Aの接触面91fとの間に対向間隔Iを確保できる。その結果、接触面91fは竿Tに近い位置で前側リンクLFに接触するので、竿Tに係合した前側リンクLF1に、図10に示す矢印C方向への振れを生じさせることがない。
本第四実施形態装置は、上部規制部材を有していないので、竿Tの上昇移動完了時の竿Tから先方Qへの飛び出しを生じにくいソーセージSに対して、より具体的には、長いリンクLからなる長いループSLを吊るす場合に適用すると良い。また、第四実施形態装置は、竿Tに係合した後側リンクLR1が上昇移動する竿Tに押されても、上方Uへ振られにくい生産条件、例えば、フック22からの後側リンクLRへの制動によって上方UへのリンクLR1の振れを規制できる場合に適用されるので、上部規制部材を有していなくとも竿Tに対する前側リンクLF1と後側リンクLR1の係合位置のずれが防止される。また、この第四実施形態装置は上部規制部材を省略することで、第一実施形態装置に比し装置を簡単化できる。
<第五実施形態装置>
前出の第一ないし第四実施形態装置では、搬出コンベア60が鉤部61Aで受け取った竿Tを竿集積コンベア70に向け縦方向の下降移動域を経て下方Dへ向け搬出していたが、図7(A)の第五実施形態装置では、横方向に搬出している点に特徴がある。第五実施形態装置は、ソーセージループ吊下装置10と、第三発明に係る実施形態である竿へのソーセージループ吊下位置決め装置1Dと、該位置決め装置1Dから竿Tを横方向に搬出する搬出コンベア130を備えている。竿へのソーセージループ吊下位置決め装置1Dは前部規制装置110と竿移行装置120、そして第一実施形態装置と同じ上部規制部材80を備えている。
ソーセージループ吊下装置10は第一実施形態装置のものと実質同じ構成であるが、フック22は後方Rへの回動をすることなく、静止状態で巻き掛け移動体21に取付けられている。静止状態のフック22からループSLを外して竿Tに吊下するため、竿掛止腕体51の上昇移動ストロークが、第一実施形態装置よりも大きく設定されている。
上部規制部材80は、本実施形態装置では、竿Tの後部と竿Tの前部のそれぞれに対向する位置に基部80Aが固着しており、該基部80Aは基体2に固定されている。
前部規制装置110は、前部規制部材111を有していて、第一実施例装置と同じシリンダ装置94によって回動されるようになっている。前部規制装置110は、シリンダロッド94Bにピン94B1を介して回転自在に連結したアーム112と、アーム112が固定された軸部材113と、軸部材113のための軸受体114と、軸部材113に固定された歯車115と、基体2に両端部を回転可能に支持された回動軸93の長手方向端部近傍に固定されていて、前記歯車115にかみ合う歯車116と、上記前部規制部材111を取付部材118を介して回動軸93に連結する回動腕117を有している。回動軸93の上方Uの位置に回動軸93に並行に設けられた上記軸部材113の回動運動は、歯車115と歯車116によって拡大されて回動軸93に伝達されるようになっている。
前部規制部材111はその基点部111Pから竿掛止腕体51の移動方向Pに延びる前部規制傾斜部としての斜部111Aを有しており、その基点部111Pから下方Dに、取付部材118が固定された固定部111Bが形成されている。この前部規制部材111は、第一ないし第四実施形態装置における前部規制部材91が有する縦部91Bに相当する部分を有していない。本第五実施形態装置では、前側リンクLFとの接触は斜部111Aのみで行なうが、第1位置PS1にある基点部111Pから回動軸93に向かって延びる斜部111Aは、前部規制部材91における斜部91Aと同じ作動を行うことができ、それによって前部規制部材91の斜部91Aと実質同じ作用効果を得ることができる。
竿移行装置120は、竿Tの前部側の基体2と竿Tの後部側の基体2にそれぞれ取り付けられた一対のシリンダ装置121、121と、各シリンダ装置121のシリンダロッド121Bに上端部で回転自在につながったレバー122と、一端部がレバー122の下端部に固定され、他端部が竿上昇カム52Cと一体となったレバー124に固定された軸部材123とを有している。
竿移行装置120から移行された竿Tを受け取る竿受部材125が基体2に固定されている。竿受部材125には、水平状態の上記軸部材123を往復回動可能に支持する軸受穴部125Aと、竿掛止鉤部材52からの竿Tを受け取って竿Tを待機させる竿載置部125Bとが形成されている。
竿移行装置120は前部規制装置110から独立した装置として構成されており、竿掛止鉤部材52が最上位置HPにある竿掛止腕体51の回動中心52A―1を中心にして竿受部材125に向かう回動と、前部規制部材111の前方Fへの回動とを別個に動作させることによって、竿掛止鉤部材52が竿Tを竿受部材125に受け渡した後も、前部規制部材111の前方Fへの回動が継続するようになっている。それによって前部規制部材111は、水平に配置された搬出コンベア130を超えた第2位置PS2まで、第一実施形態装置の前部規制部材91に比して大きな移動をおこなう。
竿移行装置120では、図7(B)(a)に見られるように、シリンダロッド121Bの最突出状態におけるレバー124は、回動中心52A―1と同芯に配された軸部材123から真下に懸垂した姿勢で停止するようになっている。レバー124のこの姿勢時に竿上昇カム52Cは、基体2に固定された第一実施形態装置における竿上昇カム52Cと同じ位置になるように、レバー124に固定されている。従って第一実施形態装置と同じく、竿掛止腕体51が最上位置HPに達した時の竿掛止鉤部材52は、停止中の竿上昇カム52Cとの係合による回動を完了しており、竿Tはその回動によって最上位SHまで持ち上げられている。
最上位SHにある上記竿Tを竿受部材125へ移行させるに際して、竿移行装置120の作動よりも先行した前部規制装置110の作動によって前部規制部材111を竿受部材125の前方Fへ移動させ、前部規制部材111が竿T移行の障害になることを防ぐ。シリンダロッド121Bが没入して行くと、竿上昇カム52Cは軸部材123まわりにレバー124と共に反時計方向へ回動して、竿移行部材としての竿掛止鉤部材52を下方から押し上げる。それによって竿掛止フック部52Aは竿載置部125B領域内まで回動して、竿掛止フック部52Aの竿Tを竿載置部125Bの上に受け渡す(図7(B)(b)参照)。このように本実施形態装置の竿掛止鉤部材52は、その竿掛止フック部52Aが竿載置部125B領域内まで回動して、竿移行部材としても機能する。竿受部材125の前方まで移動していた前部規制部材111は第2位置PS2へ向けさらに回動し、第2位置PS2にて停止する。
最上位置HP方向への上昇移動中の竿掛止鉤部材52が当接しない位置に竿上昇カム52Cを配置し、竿掛止腕体51が最上位置HPに達した後の軸部材123まわりの竿上昇カム52C回動によって、竿Tが最上位SHを通り越して竿受部材125まで移動されるように、竿掛止鉤部材52を竿載置部125B領域内まで回動させるようにしてもよい。竿掛止腕体51が最上位置HPに達するまでは、竿掛止鉤部材52は竿上昇のための回動を開始しないので、竿受部材125への竿Tの受け渡しがより一層安定する。
第五実施形態装置に設けられた竿移行装置120も、本発明における「最上位にきた竿を竿掛止腕体から竿受部材へ向け移行させる竿移行装置」に相当するものである。
上述したシリンダ装置121とレバー122による回動に代えて、電動モータをはじめとする回転アクチュエータによって、軸部材123を往復回動することもできる。
図7(A)にて、搬出コンベア130は二つのスプロケット131,132に巻回されて横方向に走行する受取りチェーン133と、該受取りチェーン133に等間隔に取り付けられた2個の鉤部133A,133Aとを有している。受取りチェーン133は上側が搬送路、下側が帰路であり、上側チェーンに取り付けられた鉤部133Aが左方向に向けた屈曲部を有する形状をなし、上側チェーンが前方Fへ走行する。竿Tは図7(B)(a)に図示された位置にて停止するようになっている。
次の竿Tが竿受部材125に移行されてくると搬出コンベア130が再起動し、竿受部材125上で待機していた次の竿Tが、下から回動してくる鉤部133Aによって受け取られて上側チェーン上に受け渡される。該竿Tは鉤部133Aに近接した位置で上側チェーンとともに前方Fへ、第2位置PS2にて停止している前部規制部材111から離れた下方位置を通過して、図示された位置まで搬送され、ここで搬出コンベア130から取り出される。
竿移行装置120は、竿掛止腕体51からの竿Tを竿受部材125へ移行せずに、竿受部材125を設けることなく、搬出コンベア130の受取りチェーン133あるいは鉤部133Aに移行させる構成をとることもできる。この構成においては、受取りチェーン133あるいは鉤部133Aが本発明の竿受部材に相当する。
本実施形態装置の搬出コンベア130は水平に配設されているが、搬送方向へ向って上下のいずれかの方向に所望な角度で傾斜した搬出コンベア130によって、竿Tを横方向に搬出することもできる。
このように第五実施形態装置では、ループSLを吊下した竿Tは前部規制部材111の前方Fの所定位置まで横方向に搬出コンベア130で搬送される。その結果、前部規制部材111の前方Fの場所から搬出コンベア130上のループSLを吊下した竿Tに接近できるので、人手により、あるいはロボットなどの自動ハンドリング装置によって該竿Tを取り出すことができる。
また、本実施形態装置において、搬出コンベア130を設けない構成の装置にすることもできる。その場合、人手によって竿Tを竿受部材125から取り出す態様にすると、簡便な装置になる。
<第六実施形態装置>
第六実施形態装置は、図8(A)、図8(B)に見られるように、第一実施形態装置と同じソーセージループ吊下装置10と竿移行部材101、並びに第五実施形態装置と同じ横方向へ竿を搬出する搬出コンベア130とを備えているが、前部規制部材111が二つの回動リンク144,145からなる回動腕142によって搬出コンベア130の上方Uの位置まで回動されることを特徴としている。
ソーセージループ吊下装置10の竿上昇移動装置50は、竿上昇カム52Cへの上昇移動中の当接で回動する竿掛止鉤部材52によって、掛止されている竿Tを最上位SHまで移動させ、その後、最上位SHの竿Tを回動軸93に取り付けられた竿移行部材101の回動によって竿受部材165に移行させるようになっており、この点において、第一実施形態装置と同じである。
本実施形態装置の竿へのソーセージループ吊下位置決め装置1Eは、前部規制装置140と竿移行装置160を備えている。
前部規制装置140は、基体2に固定された電動モータ141と、該電動モータ141の減速機部141Aに一方の端部が接続され、他方の端部が前記基体2に対面する側の基体2に支持された回動軸93と、回動軸線AX方向において第一実施形態装置と同じ位置関係で回動軸93に固定的に取り付けられている2個の回動腕142、142並びに2個の竿移行部材101、101と、取付部材143を介して回動腕142に取り付けられた前部規制部材111を有している。電動モータ141の正逆回転によって竿移行部材101は待機位置WPと竿受部材165との間を、そして前部規制部材111は第1位置PS1と第2位置PS2との間を、それぞれ回動軸線AXまわりに往復回動するようになっている。
回動腕142は主回動リンク144と従回動リンク145からなっている。主回動リンク144は、回動軸93に固定的に取り付けられた一端部と、支点軸146が回動自在に取り付けられた他端部とを、そして従回動リンク145は支点軸146に固定された一端部と取付部材143に接続した他端部とをそれぞれ有している。
前部規制装置140は、更に、上記従回動リンク145を主回動リンク144に対して独立回動させるための回動リンク駆動機構147を有している。この回動リンク駆動機構147は、支点軸146に固定されたスプロケット148と、後述の2個の歯車151,151のそれぞれに一体化した2個のスプロケット149,149と、該スプロケット148とスプロケット149に掛け渡された無端のチェーン150とからなる巻掛け伝動機構を有している。この巻掛け伝動機構はプーリーとベルトをはじめとした他の公知な伝動要素で構成してもよい。従回動リンク145の作動が上記巻掛け伝動機構によるので、前部規制装置140が小型化する。
更に、回動リンク駆動機構147は、上記2個の回動腕142,142に対応した回動軸93上の二つの位置に、回動軸93に対して回転自在に取り付けられた2個の歯車151,151と、回動軸93の上方Uに回動軸93に並行に配置されたリンク作動軸152と、上記2個の歯車151,151に噛み合っていて、リンク作動軸152に嵌ってリンク作動軸152と一体的に回転する2個の歯車153,153と、基体2に固設されてリンク作動軸152を回転駆動する電動モータ154とを有している。上記リンク作動軸152は、その他方端部が該電動モータ154の減速機部154Aに接続され、一方端部が電動モータ141を設けた上記基体2に回転支持されている。回動リンク駆動機構147の上記構成要素は、回動軸93の回動軸線AX方向中心位置に関して左右対称に配置されている。
このような構成のもとで、電動モータ154の回転は、歯車153を介して歯車151に伝達されたのちに、一対のスプロケット148、149及びにチェーン150を介して、支点軸146に伝達され、それによって支点軸146に固定された従回動リンク145を回動するようになっており、前部規制部材111は従回動リンク145の該回動によって、第2位置PS2から搬出コンベア130の上方Uにある第3位置PS3に回動するようになっている。
電動モータ141は前部規制部材111を第1位置PS1から第2位置PS2まで回動させると停止して、回動軸93と回動腕142の回動を停止させる。これに対して電動モータ154は上記電動モータ141の作動停止下で回転して、従回動リンク145を支点軸146を中心にして時計方向へ回動させる。前部規制部材111が第2位置PS2から第3位置PS3に達すると電動モータ154が停止して、従回動リンク145の上記回動を停止させる。この時点で従回動リンク145は主回動リンク144に対して折り曲がった形態をなしている。
搬出コンベア130上の竿Tに吊下されたループSLが第2位置から上方Uに離れた第3位置PS3上で停止している前部規制部材111の下方Dを通過すると、電動モータ154が逆回転して、従回動リンク145が主回動リンク144に対して直列に配された形態に戻るまで、従回動リンク145を支点軸146まわりに反時計方向へ回動させる。回動腕142の主回動リンク144と従回動リンク145が直列に配された形態に戻ることによって、前部規制部材111が第3位置PS3から第2位置PS2に復帰すると、電動モータ141が作動する。それによって、回動腕142は後方Rへ回動して、第1位置PS1に戻る。
上記した第1位置PS1から第2位置PS2への回動中と、第2位置PS2から第1位置PS1への回動中において、従回動リンク145は主回動リンク144に対して、図8(B)に見られるように、直列に配された形態に維持される。
竿移行装置160は、電動モータ141、回動軸93、竿移行部材101を有している。そして、基体2に固定された本実施形態装置の竿受部材165の竿載置部165Aは立設部位に向って斜面をなした形状となっている。竿移行装置160は、第一実施形態装置の竿移行装置100におけるシリンダ装置94に代えて電動モータ141を有している点を除いて、竿移行装置100と同じ構成で同じ作動を行い、実質同じ作用効果を得る。
竿移行装置160は、竿掛止腕体51からの竿Tを竿受部材165へ移行せずに、竿受部材165を設けることなく、搬出コンベア130の受取りチェーン133あるいは鉤部133Aに移行させる構成をとることもできる。この構成においては、受取りチェーン133あるいは鉤部133Aが本発明の竿受部材に相当する。
前述した第一実施形態装置の第2位置PS2は、前部規制部材91が搬出コンベア60で縦方向・下方Dへ搬送されるループSLとの接触を回避する位置であるともに、竿移行部材101が竿Tを竿受部材105に受け渡し完了した時点での前部規制部材91の位置でもある。これに対して、本実施形態装置の第2位置PS2は、竿移行部材101が竿Tを竿受部材165に受け渡し完了した時点での前部規制部材111の位置であり、前部規制部材111が搬出コンベア130で横へ搬送されるループSLとの接触を回避する位置は、上記第2位置PS2から更に上方Uへ離れた第3位置PS3として設けられている。
第六実施形態装置は、主回動リンク144と従回動リンク145からなる回動腕142で前部規制部材111を搬出コンベア130の上方Uにある第3位置PS3まで回動させるので、回動軸93から第3位置PS3までの距離を短くできる。その結果、第六実施形態装置は、短い搬出コンベア130を用いた小アイドル時間の小型な装置になる。
回動腕142は搬出コンベア130を設けない装置にも適用できる。搬出コンベア130を設けない装置において、人手、もしくはロボットをはじめとする自動ハンドリング装置によって竿Tを竿受部材165から取り出す態様にすると、前部規制部材111より前方Fの場所から近い距離にある竿受部材165上の竿Tを、容易に取り出すことができる。取り出された竿Tは人手により、あるいは上記ロボットなどによって、例えば、ソーセージ熱処理用の台車まで運搬できる。
<第七実施形態装置>
竿へのソーセージループ吊下位置決め装置1Fを有する第七実施形態装置を図9(A)、図9(B)に示す。第七実施形態装置は本位置決め装置1Fを除くと、第六実施形態装置と同じである。本位置決め装置1Fの竿移行部材101と前部規制部材111は第一実施形態装置の竿へのソーセージループ吊下位置決め装置1と同様に、前部規制部材111の回動軸線AXまわりを往復回動するようになっているが、前部規制部材111が竿移行部材101よりも大きい回動角度で往復回動する点に特徴がある。
竿移行装置170は、基体2に固定された電動モータ171と、該電動モータ171の減速機部171Aに一方の端部が接続され、他方の端部が前記基体2に対面する側の基体2に支持された第1回動軸172とを有しており、第1回動軸172の回動軸線AX方向において第一実施形態装置と同じ位置関係で2個の竿移行部材101、101が第1回動軸172に固定的に取り付けられている。
前部規制装置173は、基体2に固定された電動モータ174と、第1回動軸172に嵌って第1回動軸172に回転自在に支持されている中空形状の第2回動軸175と、第2回動軸175に回動腕117を介して固定されている回動歯車176と、回動歯車176に噛み合って電動モータ174の回転を回動歯車176に伝達する駆動歯車177と、電動モータ174の減速機部174Aに接続されるとともに駆動歯車177が固定された駆動軸178と、駆動軸178を軸支する軸受体179とを有している。第2回動軸175には、回動軸線AX方向において第一実施形態装置と同じ位置関係で2個の回動腕117、117が固定されており、2個の回動腕117、117には前部規制部材111が取付部材118を介して取り付けられている。第2回動軸175と2個の回動腕117、117と回動歯車176は一体化されており、駆動歯車177に駆動されて、第1回動軸172に支えられて回動するようになっている。尚、第2回動軸175は、第1回動軸172によらずに、基体2に別に設けられた第2回動軸175のための軸受によって、軸の外周部で支持されてもよい。
竿移行部材101は電動モータ171の正逆回転によって待機位置WPと竿受部材165との間を、そして前部規制部材111は電動モータ174の正逆回転によって、駆動歯車177と回動歯車176を介して、第1位置PS1と、搬出コンベア130の上方Uにある第2位置PS2との間を、回動軸線AXまわりに往復回動するようになっている。
竿移行部材101が竿受部材165位置にて前方Fへの回動を停止するまでは、前部規制部材111が竿移行部材101の前方回動に同期・同調して第1位置PS1から前方へ回動するように、電動モータ171と電動モータ174は第1回動軸172と第2回動軸175の回転を制御する。そして前部規制部材111の第2位置PS2から第1位置PS1への後方Rへの回動においては、上記前方Fへの回動と逆の回転制御が行われるようになっている。このように竿移行部材101と前部規制部材111とは同一回動軸線AXまわりに相互に異なる回動角度で回動する。このような構成の第七実施形態装置は、第六実施形態装置と比べて、装置が簡素化する。