JP6448659B2 - 手術用顕微鏡スタンド - Google Patents
手術用顕微鏡スタンド Download PDFInfo
- Publication number
- JP6448659B2 JP6448659B2 JP2016558125A JP2016558125A JP6448659B2 JP 6448659 B2 JP6448659 B2 JP 6448659B2 JP 2016558125 A JP2016558125 A JP 2016558125A JP 2016558125 A JP2016558125 A JP 2016558125A JP 6448659 B2 JP6448659 B2 JP 6448659B2
- Authority
- JP
- Japan
- Prior art keywords
- carriage
- surgical microscope
- microscope stand
- unit
- stand
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/001—Counterbalanced structures, e.g. surgical microscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/20—Surgical microscopes characterised by non-optical aspects
- A61B90/25—Supports therefor
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/0004—Microscopes specially adapted for specific applications
- G02B21/0012—Surgical microscopes
Landscapes
- Health & Medical Sciences (AREA)
- Physics & Mathematics (AREA)
- Surgery (AREA)
- Optics & Photonics (AREA)
- General Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Molecular Biology (AREA)
- Veterinary Medicine (AREA)
- Medical Informatics (AREA)
- Biomedical Technology (AREA)
- Animal Behavior & Ethology (AREA)
- Engineering & Computer Science (AREA)
- Public Health (AREA)
- Heart & Thoracic Surgery (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Pathology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Microscoopes, Condenser (AREA)
Description
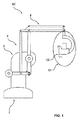
4 支持柱体
6,8 操舵アーム
14,22 支持アーム
16,18,20 キャリッジ
30,32 グリップ
34 タッチスクリーン
36 位置センサ
100 手術用顕微鏡スタンド
101 懸吊装置
102 手術用顕微鏡
P1,P2,P3 方向
Claims (11)
- 第1の支持アーム(14)と第2の支持アーム(22)との間に配置されていて、第1の駆動ユニットにより第2の支持アーム(22)を第1の支持アーム(14)に対して相対的に第1の方向(P1)に駆動可能な第1のキャリッジ(16)と、
前記第2の支持アーム(22)と手術用顕微鏡(102)との間に配置されていて、第2の駆動ユニットにより前記手術用顕微鏡(102)を前記第2の支持アーム(22)に対して相対的に前記第1の方向(P1)と異なる第2の方向(P2)に駆動可能な第2のキャリッジ(18)と、
を有する手術用顕微鏡スタンド(100)であって、
前記手術用顕微鏡スタンド(100)は、前記第1及び第2の駆動ユニットを手動制御するための少なくとも1つの操作ユニット(34)を更に有し、
前記第1のキャリッジ(16)または前記第2のキャリッジ(18)に、空間内での位置を検出するための位置センサ(36)が設けられており、
前記第1のキャリッジ(16)または前記第2のキャリッジ(18)に関して予め定められた、所定のゼロ位置に対して相対的な許容移動範囲が、前記手術用顕微鏡スタンド(100)の制御ユニットに記憶されており、前記操作ユニット(34)の操作による前記第1のキャリッジ(16)または前記第2のキャリッジ(18)の走行は、前記許容移動範囲内でのみ可能であり、
前記制御ユニットは、前記位置センサ(36)により検出された位置を、前記予め定められた許容移動範囲と比較し、この比較の結果に応じて、前記第1のキャリッジ(16)または前記第2のキャリッジ(18)の移動ロックを解除することを特徴とする、手術用顕微鏡スタンド(100)。 - 前記第2のキャリッジ(18)と手術用顕微鏡(102)との間に配置されていて、第3の駆動ユニットにより前記手術用顕微鏡(102)を前記第2のキャリッジ(18)に対して相対的に前記第1の方向(P1)および前記第2の方向(P2)と異なる第3の方向(P3)に駆動可能な第3のキャリッジ(20)を更に有しており、
前記操作ユニット(34)は、前記第3のキャリッジ(20)を手動制御可能に構成されている、請求項1記載の手術用顕微鏡スタンド(100)。 - 前記第1、第2、および第3のキャリッジ(16,18,20)を手動制御するための前記操作ユニット(34)は、タッチスクリーン(34)により形成されている、請求項1又は2記載の手術用顕微鏡スタンド(100)。
- 前記操作ユニット(34)は、前記第1の支持アーム(14)に形成されている、請求項1から3までのいずれか1項記載の手術用顕微鏡スタンド(100)。
- 前記位置センサ(36)は、手術用顕微鏡(102)を取付け可能なキャリッジ(16,18,20)に配置されている、請求項1から4までのいずれか1項記載の手術用顕微鏡スタンド(100)。
- 検出された前記位置は、前記操作ユニット(34)により表示可能である、請求項1から5までのいずれか1項記載の手術用顕微鏡スタンド(100)。
- 前記第1、第2、および第3のキャリッジ(16,18,20)に関してそれぞれ予め定められた、所定のゼロ位置に対して相対的な許容移動範囲が、前記制御ユニットに記憶されており、前記操作ユニット(34)の操作による前記第1、第2、および第3のキャリッジ(16,18,20)の走行は、前記各移動範囲内でのみ可能である、請求項1から6までのいずれか1項記載の手術用顕微鏡スタンド(100)。
- 前記操作ユニット(34)は、前記第1、第2、および第3の方向(P1,P2,P3)への前記第1、第2、および第3のキャリッジ(16,18,20)の移動が許可されているか否かに関する情報を表示する、請求項1から7までのいずれか1項記載の手術用顕微鏡スタンド(100)。
- 前記制御ユニットは、リアルタイムで検出された前記第1、第2、および第3のキャリッジ(16,18,20)の各位置に応じて、移動可能なキャリッジ(16,18,20)を確定し、これに対応して、前記操作ユニット(34)における情報表示を制御する、請求項1から8までのいずれか1項記載の手術用顕微鏡スタンド(100)。
- 前記操作ユニット(34)は、前記手術用顕微鏡スタンド(100)の釣合わせ、照明、ビデオ録画、作業距離、拡大及び/又は警告に関する情報を表示する、請求項1から9までのいずれか1項記載の手術用顕微鏡スタンド(100)。
- 前記第1、第2、および第3のキャリッジ(16,18,20)のうちの1つに、前記手術用顕微鏡(102)を取り付けるための取付けユニットが配置されており、該取付けユニットの上に前記操作ユニット(34)が設けられている、請求項1から10までのいずれか1項記載の手術用顕微鏡スタンド(100)。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102014103758.8 | 2014-03-19 | ||
| DE102014103758.8A DE102014103758A1 (de) | 2014-03-19 | 2014-03-19 | Operationsmikroskop-Stativ |
| PCT/EP2015/055753 WO2015140241A1 (de) | 2014-03-19 | 2015-03-19 | Operationsmikroskop-stativ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017513553A JP2017513553A (ja) | 2017-06-01 |
| JP6448659B2 true JP6448659B2 (ja) | 2019-01-09 |
Family
ID=52686385
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016558125A Active JP6448659B2 (ja) | 2014-03-19 | 2015-03-19 | 手術用顕微鏡スタンド |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10310212B2 (ja) |
| EP (1) | EP3120178B1 (ja) |
| JP (1) | JP6448659B2 (ja) |
| CN (1) | CN106133574B (ja) |
| DE (1) | DE102014103758A1 (ja) |
| WO (1) | WO2015140241A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USD800814S1 (en) * | 2014-11-19 | 2017-10-24 | Carl Zeiss Meditec Ag | Mount for surgical microscope |
| EP3625601B1 (en) * | 2017-09-29 | 2025-05-14 | Leica Biosystems Imaging, Inc. | Two pass macro image |
| EP3518014B1 (en) * | 2018-01-30 | 2020-11-18 | Leica Instruments (Singapore) Pte. Ltd. | Balancing device and method for balancing a microscope |
| EP3822681B1 (en) | 2019-11-14 | 2024-01-03 | Leica Instruments (Singapore) Pte. Ltd. | Surgical microscope system and corresponding apparatus, method and computer program |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE9204118U1 (de) * | 1992-03-27 | 1992-05-21 | Fa. Carl Zeiss, 7920 Heidenheim | Führungssystem zum räumlichen Positionieren eines medizinischen Therapie- oder Diagnoseinstrumentes |
| JP2001046399A (ja) * | 1999-08-13 | 2001-02-20 | Olympus Optical Co Ltd | 手術用顕微鏡装置 |
| DE10133018A1 (de) * | 2001-07-06 | 2003-01-16 | Leica Mikroskopie Systeme Ag H | Stativ |
| JP4832679B2 (ja) * | 2001-09-11 | 2011-12-07 | オリンパス株式会社 | 顕微鏡システム |
| DE10163354A1 (de) * | 2001-12-21 | 2003-07-03 | Leica Microsystems | Vorrichtung zum Halten einer optischen Betrachtungseinrichtung |
| US7594188B2 (en) * | 2003-08-21 | 2009-09-22 | Carl Zeiss Ag | Operating menu for a surgical microscope |
| DE102005018432A1 (de) * | 2005-04-21 | 2006-10-26 | Leica Microsystems (Schweiz) Ag | Optisches System mit Display |
| DE102005018431A1 (de) * | 2005-04-21 | 2006-10-26 | Leica Microsystems (Schweiz) Ag | Operationsmikroskop |
| DE102007009543A1 (de) * | 2007-02-27 | 2008-08-28 | Leica Microsystems (Schweiz) Ag | Mikroskopgerät mit Positionserfassung |
| EP2082700A1 (de) * | 2008-01-24 | 2009-07-29 | Möller-Wedel GmbH | Anordnung aus einem Operationsmikroskop und einer Anzeigeeinheit |
| DE102008011638B4 (de) | 2008-02-28 | 2016-03-10 | Leica Instruments (Singapore) Pte. Ltd. | Balanciervorrichtung für Operations-Mikroskop |
| DE102010063392B4 (de) * | 2010-11-15 | 2016-12-15 | Leica Microsystems (Schweiz) Ag | Mikroskop mit Sensorbildschirm, zugehörige Steuereinrichtung und Betriebsverfahren |
| DE102012202303A1 (de) | 2012-02-15 | 2013-08-22 | Leica Microsystems (Schweiz) Ag | Verstellbares Stativ |
| DE102012209594B3 (de) | 2012-06-06 | 2013-06-06 | Leica Microsystems (Schweiz) Ag | Stativ |
-
2014
- 2014-03-19 DE DE102014103758.8A patent/DE102014103758A1/de not_active Withdrawn
-
2015
- 2015-03-19 EP EP15710523.0A patent/EP3120178B1/de active Active
- 2015-03-19 CN CN201580014761.5A patent/CN106133574B/zh active Active
- 2015-03-19 JP JP2016558125A patent/JP6448659B2/ja active Active
- 2015-03-19 US US15/126,842 patent/US10310212B2/en active Active
- 2015-03-19 WO PCT/EP2015/055753 patent/WO2015140241A1/de not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| US10310212B2 (en) | 2019-06-04 |
| EP3120178B1 (de) | 2023-08-23 |
| JP2017513553A (ja) | 2017-06-01 |
| DE102014103758A1 (de) | 2015-09-24 |
| WO2015140241A1 (de) | 2015-09-24 |
| EP3120178A1 (de) | 2017-01-25 |
| CN106133574A (zh) | 2016-11-16 |
| US20170097488A1 (en) | 2017-04-06 |
| CN106133574B (zh) | 2019-12-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6448659B2 (ja) | 手術用顕微鏡スタンド | |
| JP6406088B2 (ja) | 操作システム | |
| US11215807B2 (en) | Microscope having a button for switching between functions of a focus knob | |
| RU2017118400A (ru) | Операционный стол и напольная платформа для операционного стола | |
| JP2020533534A (ja) | 主保持体と機器保持体とを有する装置 | |
| JP2011071115A (ja) | 電化製品を操作するための方法および装置 | |
| JP2013545624A (ja) | ハンドリング装置のプログラミングのための装置及び方法 | |
| JP6000787B2 (ja) | 放射線画像撮影装置および放射線画像撮影装置の制御方法 | |
| EP3824838B1 (en) | Collision prevention system for overhead assembly | |
| JP6296718B2 (ja) | 放射線撮影装置 | |
| JP2008183109A (ja) | 天井走行式x線管懸垂器 | |
| JP2007244569A (ja) | 天井走行懸垂型のx線撮影装置 | |
| JP2021026254A5 (ja) | ||
| JP2019527171A (ja) | 空中装置のための制御レバーを備えた制御センター | |
| JP6079873B2 (ja) | 回診用x線撮影装置 | |
| US12314074B2 (en) | Steering command means | |
| JP2007083809A (ja) | 車両のステアリング装置 | |
| JP2520230Y2 (ja) | カメラの遠隔操作装置 | |
| JP2010167112A (ja) | X線撮影装置 | |
| JP2017176491A (ja) | モニタ天吊装置 | |
| JP2012123966A (ja) | 操作装置 | |
| JP2009255258A (ja) | 移動体の位置決め装置 | |
| JP6093628B2 (ja) | 表面性状測定機およびその表示制御方法 | |
| JP6493835B2 (ja) | 操作受付装置 | |
| CN111200971A (zh) | 用于控制使用该系统的放射设备的机动部件的至少一个移动的系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161116 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170926 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171002 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180104 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180319 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180615 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180816 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180918 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181119 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181204 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6448659 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |