JP6448827B2 - レーダ装置、誘導装置及びレーダ信号処理方法 - Google Patents
レーダ装置、誘導装置及びレーダ信号処理方法 Download PDFInfo
- Publication number
- JP6448827B2 JP6448827B2 JP2018005689A JP2018005689A JP6448827B2 JP 6448827 B2 JP6448827 B2 JP 6448827B2 JP 2018005689 A JP2018005689 A JP 2018005689A JP 2018005689 A JP2018005689 A JP 2018005689A JP 6448827 B2 JP6448827 B2 JP 6448827B2
- Authority
- JP
- Japan
- Prior art keywords
- frequency
- radar
- steps
- fft
- pri
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



























Landscapes
- Radar Systems Or Details Thereof (AREA)
Description
(第1の実施形態)
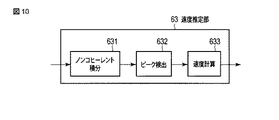
図1は第1の実施形態に係るレーダ装置の構成を示すブロック図である。図1に示すレーダ装置は、シンセサイザ1、レーダ波送信部2、サーキュレータ3、アンテナ4、レーダ波受信部5、信号処理部6を備える。上記信号処理部6は、ゼロ付加部61、FFT62及び速度推定部63を備える。
図2は、合成帯域レーダを説明するために、図1に示すレーダ装置において、周波数ステップ毎に生成される送信パルスを示すタイミング図である。図2において、横軸は時間、縦軸は周波数であり、長方形のバーは所定パルス長、所定帯域幅を有するパルスを示している。個々のパルスの時間間隔がPRIであり、一つのキャリア周波数、すなちわ、1周波数ステップに付き、Np 個のパルスを送受信し、次の周波数に移って、またNp 個のパルスを送受信する、といった手順を繰り返す。周波数ステップの数はNf 個であり、トータルでNf 回繰り返す。
図4(a)は各周波数ステップのPRI長とスペクトルのビン間隔周波数、図4(b)は全周波数ステップを同じサンプル数でFFTした場合のドップラスペクトルを示している。PRI決定の手順としては、おおよそのPRI(図4の例では200μs)を決定し、その周辺で2μsずつPRI長が変化するようにPRIを設定した。各周波数ステップのパルス数は10であり、ビン間隔は1/フレーム長となる。ここでは、スペクトルを滑らかに表示するように補間している。補間は後ろにゼロを付けて補間するショートタイムフーリエ変換を利用しているが、ゼロの数は全周波数ステップで共通である。また、フレーム長はゼロを含まないパルス列のみの長さで定義している。
このようにして得られたサンプル数等の例を図7に示す。図7(a)はFFTフレーム内サンプル数、(b)はPRI長とビン間隔周波数を示している。この例では、FFTフレーム内サンプル数が周波数ステップ毎に1ずつ異なっている。PRI長は約190μs〜約208μsであり、図4とよく似た値となっているが微妙に異なる。具体的には、{190.476,192.308,194.175,196.078,198.020,200,202.020,204.082,206.186,208.333}μsである。ビン間隔周波数は、全周波数ステップで共通となっている。後ろにゼロを付ける操作は、ドップラスペクトルを補間する操作と同じである。図4では補間前のサンプル数Np で決定する周波数間隔をビン間隔としたが、図7ではゼロ付加後のFFTフレーム内サンプル数で決定する周波数間隔をビン間隔として表示している。
例1… Nlm +{-5, -4, -3, -2, -1, 0, 1, 2, 2, 4}
例2… Nlm +{-5, -4, -3, -2, -1, 0, 1, 2, 3, 5}
例3… Nlm +{-6, -4, -3, -2, -1, 0, 1, 2, 2, 5}
例4… Nlm +{-5, -4, -3, -2, -1, 0, 1, 2, 3, 3}
例5… Nlm +{-4, -4, -2, -2, 0, 0, 2, 2, 4, 4}
例5は、さらに、上記の値を2で割った数まで、FFTフレーム内サンプル数を縮小することが可能である。ただし、ノンコヒーレント積分結果から求めるピークの検出精度に対する要求から、ある程度大きいサンプル数Nlm としたいこともあるため、例5のような値とすることもある。なお、前述のように、FFTフレーム内サンプル数の順序は、周波数ステップの順序、または、送信時間の順序とは関連せず、順不同でよい。
したがって、本実施形態のレーダ装置によれば、PRIが周波数ステップ毎に異なるパルス列を扱う可変PRIにおいて、低SNRであっても、周波数ステップそれぞれのドップラスペクトルのピークを揃えてコヒーレント積分するので、積分結果のピーク検出精度が向上し、これによって高い速度検出精度を得ることができる。
次に、第2の実施形態として、Low-PRFで予測速度が既知の場合を説明する。なお、本実施形態に係るレーダ装置の基本構成は、図1に示す装置と同様であるので、ここではその全体的な説明を省略する。
まず、Low-PRFでは、ドップラアンビギュイティが存在し、ドップラスペクトルが何回も折り返った状態で現れる。例えばドップラスペクトルの最後が5kHzであるにもかかわらず、ドップラ周波数が10kHzもある場合などである。
そこで、本実施形態では、予測速度が既知の場合のドップラアンビギュイティ解消方法を提供する。
次に、第3の実施形態として、Low-PRFで予測速度が既知の場合の他の形態を説明する。なお、本実施形態に係るレーダ装置の基本構成は、図1に示す装置と同様であるので、ここではその全体的な説明を省略する。
図1に示すレーダ装置において、適用先によっては、予測速度毎にシフト量を変える処理が煩雑であることがある。このような場合は、予め、シフトさせる先を複数用意しておき、予測速度に対応して、予測速度が揃うように、シフトさせる先を選択する構成にするとよい。
すなわち、ビン数が周波数ステップ毎に異なるため、スペクトルの端にピークがかかると、正しく検出できないことがある。図17(a)にその一例を示す。図17(a)は、周期の開始点の周波数を合わせたが、予測速度の値が真の速度の値(真値)より5 m/s少なく、かつ、真値と予測速度値がビン番号0を跨いでおり、真値より1周少ない周回数に合わせてしまった場合のスペクトルである。なお、この例において、各スペクトルは、スペクトルの最後のビンの後ろに0を付与し、最後のビンの位置が明確に読み取れるようにしている。この例の場合、スペクトルの始めの方に、1周、間違ったピークが現れているが、間違った周回であるため、各スペクトルのピーク位置が無秩序になっている。
なお、図17(a)からわかるように、一部の周波数ステップではビンのない終わりの部分はもちろんであるが、そこを除いても、スペクトルの両端で得られたピークは正しいピークでない可能性が高い。そこで、この方法では、スペクトルの両端のスペクトル線幅の半分程度を検出禁止領域とするとよい。
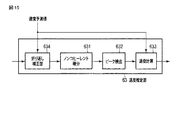
図18は、第3の実施形態において、速度推定部63に2系統を用いる場合の構成を示すブロック図である。図18において、速度推定部63には、FFT部62のFFT結果が速度推定部63に入力される。一方、速度予測値も入力される。FFT結果と速度予測値は、折り返し補正部634に入力される。折り返し補正部634において、スペクトル領域選択部6345は、速度予測値から、前述のように例えば半周ずつずれて予め設定されたスペクトル領域の内、予測速度を含むように2つのスペクトル領域を選択する。選択した結果を、シフト数選択部6346に通知する。シフト数選択部6346は、選択されるスペクトル領域において、各周波数ステップのスペクトルを各々いくつシフトさせればよいかに関するテーブルを有しており、これを参照して各周波数ステップのスペクトルのシフト数を選択する。その結果をスペクトルシフト部6347−1,6347−2に通知する。
(第4の実施形態)
次に、第4の実施形態として、Low-PRFで予測速度が未知の場合の形態を説明する。なお、本実施形態に係るレーダ装置の基本構成も、図1に示す装置と同様であるので、ここではその全体的な説明を省略する。
本実施形態は、PRIの違いを吸収することが本質であるので、必ずしも、ステップ毎にキャリア周波数が異なるレーダの種類である必要はない。以上の実施形態は、全ステップのキャリア周波数が同じでも、適用可能である。ただし、ステップ毎にキャリア周波数が異なる合成帯域レーダや周波数アジリティレーダでは、さらなる工夫を施すことによって、より速度推定精度を高めることができる。

これを各周波数ステップのキャリア周波数に比例させた値Bi となるようにする。単純には、ビン間隔にキャリア周波数fi を掛けてやればよい。ただし、バンク間隔の値を今までの値に近い値とするため、例えば帯域の中央の周波数fc に対するキャリア周波数fi の比を掛けてやればよい。
もちろん、Bi は、fi に比例した係数を掛けさえすればよいため、分母はfc 以外の定数でかまわない。上記の式に従って、周波数ステップi毎に若干変化させたフレーム長をTFFTiとする。
FFTフレーム内サンプル数は、ここまでで決定した通りの周波数ステップi毎の数NLiとすると、TFFTiをNLiで割った値が、全周波数ステップで同一速度のピークを揃えるためのPRIとなる。
図22にFFTフレーム構成を示す。この例では、各周波数ステップのキャリア周波数は、番号の昇順に増加すると仮定している。図5と比較して、周波数ステップの番号が大きくなるに従って、わずかであるが、FFTフレーム長が短くなっている。このように、FFTフレーム内でキャリア周波数の違いによるドップラ周波数の違いを吸収しようとする場合、FFTフレーム長は全周波数ステップで完全に同じにはならず、キャリア周波数が変化する割合の程度、微妙に異なる値となる。PRIi (i=1〜Nf )も、周波数ステップ番号の増加に伴って、図5と比較してやや短くなっているが、図には明瞭に現れない程度である。
上記のように、FFTフレーム長が短くなるということは、FFT後のビン間隔が大きくなる、ということである。その様子を図23に示す。横軸を周波数の絶対値で取ると、ビン間隔周波数は周波数ステップ、すなわち、キャリア周波数の増加に伴い、少しずつ長くなっている。したがって、各周波数ステップの同一ビン番号のドップラ周波数は互いに等しくならず、キャリア周波数に比例して増減している。
図26は、本実施形態に係るレーダ装置が合成帯域レーダである場合の構成を示すブロック図である。図26において、図1と同一部分には同一符号を付して示し、ここでは異なる部分について説明する。
上記実施形態では、速度を検出する部分までしか説明していなかったが、レーダとしては、距離または角度、あるいは、その両方の検出が必要であることが多い。そこで、図26では、図1に示した第1の実施形態に基づいて、合成帯域波形生成までの処理を含むレーダ装置の構成を示している。
通常、周波数アジリティレーダでは、パルス毎にキャリア周波数が変化するため、パルスドップラレーダの形態にすることは難しいが、周波数ステップ毎に複数のパルスの送受信を行うような形として、ドップラを検出することは可能である。図27の構成では、信号処理部6がドップラ周波数を検出し、距離検出部8がレーダ波受信部5の出力から距離を検出する。これらの結果は、図示しない後段のパルスドップラ処理部に送られ、パルスドップラ検出処理が行われる。
Claims (15)
- 複数のステップそれぞれで、前記ステップ毎にパルス繰り返し間隔(PRI)を変化させて複数のパルスを生成し、前記ステップ毎の複数のパルスをレーダ波として順次送信する送信部と、
前記レーダ波の反射波を受信する受信部と、
前記受信部で得られる、前記ステップ毎の複数のパルスに対応する受信信号に高速フーリエ変換(FFT)を施してドップラスペクトルを計算し、前記ドップラスペクトルの計算結果から目標の速度を推定する信号処理部と、
を具備し、
前記信号処理部は、
前記複数のステップそれぞれの複数パルスの値の周辺に、ステップ毎に定められた数のゼロを付加してから前記FFTを施し、
前記PRI、FFTフレーム長、付加するゼロの数が、それぞれ、前記ゼロを付加した後のFFTフレーム長に相当する時間が全ステップでほぼ同一になるように決定されているレーダ装置。 - 前記複数のステップは、各々互いに異なるキャリア周波数で前記複数のパルスを生成する周波数ステップである請求項1記載のレーダ装置。
- 前記周波数ステップのPRIは、前記FFTフレーム長を当該周波数ステップのゼロを含む全サンプル数で割った値に、当該周波数ステップのキャリア周波数の比に反比例する係数を乗算した値である請求項2記載のレーダ装置。
- 前記複数のステップのPRIは、さらに、前記FFTのサンプリングレートに相当する時間間隔で丸めた値である請求項1乃至請求項3のいずれか記載のレーダ装置。
- 前記複数のステップは、さらに、ゼロを含むFFTフレーム内サンプル数の最大値と最小値の差がおおよそステップの数に等しい請求項1記載のレーダ装置。
- 前記複数のステップは、さらに、ゼロを含むFFTフレーム内サンプル数が互いに1ずつ異なる請求項5記載のレーダ装置。
- 前記複数のステップは、さらに、いずれか2つのステップが、ゼロを含むFFTフレーム内サンプル数の差が1または0である請求項5記載のレーダ装置。
- 前記信号処理部は、前記複数のステップのドップラスペクトルをノンコヒーレント積分し、その積分結果のピークを検出し、そのピークから前記目標の速度を推定することを特徴とする請求項1乃至請求項4のいずれか記載のレーダ装置。
- 前記レーダ装置が低パルス繰り返し周波数(Low-PRF)型であり、目標との相対速度予測値が既知であるとき、
前記信号処理部は、前記複数のステップそれぞれのドップラスペクトルを、前記相対速度予測値周辺のドップラ周波数がいずれかのビンでほぼ揃うようにシフトして、前記ノンコヒーレント積分を行う請求項8記載のレーダ装置。 - 前記信号処理部は、前記相対速度予測値周辺で同一ビンに揃えるドップラ周波数を2つ以上設定し、それぞれのドップラ周波数について前記複数のステップそれぞれのドップラスペクトルをシフトして、前記ノンコヒーレント積分を行う請求項9記載のレーダ装置。
- 前記レーダ装置が低パルス繰り返し周波数(Low-PRF)型であるとき、
前記信号処理部は、前記複数のステップそれぞれのドップラスペクトルの複製を複数個生成し直列に並べて結合し、各ステップの結合されたドップラスペクトルを前記ノンコヒーレント積分する請求項8記載のレーダ装置。 - 帯域幅を複数の周波数帯域に分割し、分割した帯域が前記ステップに対応する合成帯域レーダに適用されるとき、
前記信号処理部で得られる前記目標の速度推定結果とFFT結果に基づいて、前記複数のステップの時間経過によるドップラスペクトルの位相変化を補正した後に、逆フーリエ変換によって合成帯域波形を生成する合成帯域処理部を備える請求項2記載のレーダ装置。 - 測定期間内にキャリア周波数が変化する周波数アジリティレーダに適用されるとき、
前記受信信号から前記目標の距離を検出する距離検出部を備える請求項2記載のレーダ装置。 - 請求項1乃至13のいずれか記載のレーダ装置と、
前記レーダ装置からの前記速度を含む目標検出情報に基づいて誘導信号を生成する誘導信号生成部と
を具備する誘導装置。 - 複数のステップそれぞれで、前記ステップ毎にパルス繰り返し間隔(PRI)を変化させて複数のパルスを生成し、前記ステップ毎に複数のパルスをレーダ波として順次送信し、前記レーダ波の反射波を受信したレーダ信号を入力して目標の速度を推定するレーダ信号処理方法であって、
前記レーダ信号から前記複数のパルスそれぞれのパルス代表値を抽出し、
前記複数のステップそれぞれのPRIに対応する数のゼロを当該ステップのパルス代表値列に付加して高速フーリエ変換(FFT)フレームを形成し、
前記複数のステップそれぞれのFFTフレームにFFTを施してドップラスペクトルを計算し、
前記複数のステップのドップラスペクトルをノンコヒーレント積分して、その積分結果からピークを検出し、
前記ピークの値から前記目標の速度を推定し、
前記PRI、FFTフレーム長、付加するゼロの数が、それぞれ、前記ゼロを付加した後のFFTフレーム長に相当する時間が全ステップでほぼ同一になるように決定されていることを特徴とするレーダ信号処理方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018005689A JP6448827B2 (ja) | 2018-01-17 | 2018-01-17 | レーダ装置、誘導装置及びレーダ信号処理方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018005689A JP6448827B2 (ja) | 2018-01-17 | 2018-01-17 | レーダ装置、誘導装置及びレーダ信号処理方法 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014036907A Division JP6279931B2 (ja) | 2014-02-27 | 2014-02-27 | レーダ装置、誘導装置及びレーダ信号処理方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018059953A JP2018059953A (ja) | 2018-04-12 |
| JP6448827B2 true JP6448827B2 (ja) | 2019-01-09 |
Family
ID=61908787
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018005689A Active JP6448827B2 (ja) | 2018-01-17 | 2018-01-17 | レーダ装置、誘導装置及びレーダ信号処理方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6448827B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20240385305A1 (en) * | 2022-01-30 | 2024-11-21 | Huawei Technologies Co., Ltd. | Detection apparatus, terminal device, and signal processing method |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7182929B2 (ja) * | 2018-07-23 | 2022-12-05 | 株式会社東芝 | レーダシステム及び信号処理方法 |
| KR102215062B1 (ko) * | 2019-03-21 | 2021-02-10 | 한국항공대학교산학협력단 | 무인기 탐지를 위한 다중모드 레이더 신호 처리 장치 및 그 방법 |
| US12092724B2 (en) * | 2019-09-17 | 2024-09-17 | Aptiv Technologies AG | Object range and velocity detection from varying radar pulse repetition times |
| WO2021170133A1 (zh) * | 2020-02-28 | 2021-09-02 | 加特兰微电子科技(上海)有限公司 | 提升目标探测精度的方法、集成电路、无线电器件及电子设备 |
| CN112068117B (zh) * | 2020-09-11 | 2023-11-03 | 上海航天电子通讯设备研究所 | 基于pd检测的精确测速修正方法及系统 |
| CN115308733B (zh) * | 2021-05-07 | 2024-12-17 | 开酷科技股份有限公司 | 距离多普勒雷达角度感测方法及装置 |
| CN115407280B (zh) * | 2021-05-26 | 2025-07-04 | 北京华航无线电测量研究所 | 一种导航用多普勒雷达抗干扰方法 |
| EP4381328A1 (en) * | 2021-09-17 | 2024-06-12 | Proceq SA | Method for probing a subsurface structure |
| CN116366082B (zh) * | 2023-01-30 | 2023-12-01 | 深圳大学 | 一种提高微秒级超短脉冲水声信号信噪比的方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6281589A (ja) * | 1985-10-04 | 1987-04-15 | Mitsubishi Electric Corp | パルスドプラレ−ダ装置 |
| JP3034346B2 (ja) * | 1991-08-12 | 2000-04-17 | 株式会社東芝 | レーダ信号処理装置 |
| US6967613B2 (en) * | 2004-03-17 | 2005-11-22 | Honeywell International Inc. | Broadband waveform reconstruction for radar |
| JP2006226955A (ja) * | 2005-02-21 | 2006-08-31 | Toshiba Corp | レーダ装置とその信号処理方法 |
| EP1886165B1 (en) * | 2005-05-31 | 2010-12-15 | Saab AB | A stepped frequency radar device |
| JP4836496B2 (ja) * | 2005-06-15 | 2011-12-14 | 株式会社東芝 | レーダ装置とその信号処理方法 |
| JP2011149871A (ja) * | 2010-01-22 | 2011-08-04 | Toshiba Corp | 周波数検出器、この周波数検出器を備える合成帯域レーダ、及び飛翔体誘導装置 |
| JP5464001B2 (ja) * | 2010-03-26 | 2014-04-09 | 日本電気株式会社 | レーダ装置、レーダ信号処理方法及びレーダ信号処理プログラム |
| JP5620216B2 (ja) * | 2010-09-30 | 2014-11-05 | 株式会社東芝 | パラメータ検出器、レーダ装置、誘導装置、及びパラメータ検出方法 |
| JP5678809B2 (ja) * | 2011-06-09 | 2015-03-04 | 三菱電機株式会社 | レーダ装置 |
-
2018
- 2018-01-17 JP JP2018005689A patent/JP6448827B2/ja active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20240385305A1 (en) * | 2022-01-30 | 2024-11-21 | Huawei Technologies Co., Ltd. | Detection apparatus, terminal device, and signal processing method |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018059953A (ja) | 2018-04-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6448827B2 (ja) | レーダ装置、誘導装置及びレーダ信号処理方法 | |
| JP6279931B2 (ja) | レーダ装置、誘導装置及びレーダ信号処理方法 | |
| CA2155502C (en) | Method of image generation by means of two-dimensional data processing in connection with a radar with synthetic aperture | |
| CN107076834B (zh) | 具有增大的多普勒能力的雷达操作 | |
| JP4988332B2 (ja) | 速度が曖昧な物標の非コヒーレント積分のための技法 | |
| CN113759321B (zh) | 基于捷变频雷达的分段脉压抗间歇采样转发干扰方法 | |
| JP5491877B2 (ja) | レーダ装置、飛翔体誘導装置及び目標検出方法 | |
| JP5620216B2 (ja) | パラメータ検出器、レーダ装置、誘導装置、及びパラメータ検出方法 | |
| WO2016188895A1 (en) | A vehicle radar system | |
| US8619908B2 (en) | Wireless ranging system and related methods | |
| US9568601B1 (en) | Successive-MFCW modulation for ultra-fast narrowband radar | |
| JP2014002053A (ja) | 車載用のレーダ装置、車載用のレーダ方法及び車載用のレーダプログラム | |
| CN115685080B (zh) | 一种雷达时间-多普勒双域联合编码波形设计与处理方法 | |
| KR102235571B1 (ko) | 저가형 다중 레이다를 이용한 거리 해상도 향상 기법 | |
| JP2021135299A (ja) | Mimoレーダシステム | |
| JP2010025901A (ja) | Fm−cwレーダ装置 | |
| EP3270180B1 (en) | Signal processing apparatus for generating a range-doppler map | |
| JP5094447B2 (ja) | パルスレーダ装置 | |
| RU2660450C1 (ru) | Устройство радиолокационной станции с непрерывным линейно-частотно-модулированным сигналом и синтезом апертуры | |
| JP2002040120A (ja) | 電波源の位置検出システム | |
| CN104237896B (zh) | 一种基于欠采样解模糊的雷达测距方法 | |
| US5231403A (en) | Moving target indicator using higher order statistics | |
| WO2021206613A1 (en) | A method, computer program product, system and radar arrangement for resolving range and velocity information | |
| CN119199827A (zh) | 一种假设相位补偿解速度模糊方法 | |
| CN108802706B (zh) | 基于位置标定的调频步进雷达信号目标抽取方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180117 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181025 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181106 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181204 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6448827 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |