JP6515899B2 - 音声対話装置及びその制御方法 - Google Patents
音声対話装置及びその制御方法 Download PDFInfo
- Publication number
- JP6515899B2 JP6515899B2 JP2016196556A JP2016196556A JP6515899B2 JP 6515899 B2 JP6515899 B2 JP 6515899B2 JP 2016196556 A JP2016196556 A JP 2016196556A JP 2016196556 A JP2016196556 A JP 2016196556A JP 6515899 B2 JP6515899 B2 JP 6515899B2
- Authority
- JP
- Japan
- Prior art keywords
- dialogue
- pupil
- distance
- size
- robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/0005—Manipulators having means for high-level communication with users, e.g. speech generator, face recognition means
- B25J11/0015—Face robots, animated artificial faces for imitating human expressions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/0005—Manipulators having means for high-level communication with users, e.g. speech generator, face recognition means
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
- G06F3/013—Eye tracking input arrangements
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/004—Artificial life, i.e. computing arrangements simulating life
- G06N3/008—Artificial life, i.e. computing arrangements simulating life based on physical entities controlled by simulated intelligence so as to replicate intelligent life forms, e.g. based on robots replicating pets or humans in their appearance or behaviour
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2203/00—Indexing scheme relating to G06F3/00 - G06F3/048
- G06F2203/01—Indexing scheme relating to G06F3/01
- G06F2203/011—Emotion or mood input determined on the basis of sensed human body parameters such as pulse, heart rate or beat, temperature of skin, facial expressions, iris, voice pitch, brain activity patterns
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/16—Sound input; Sound output
- G06F3/167—Audio in a user interface, e.g. using voice commands for navigating, audio feedback
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- General Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Health & Medical Sciences (AREA)
- Robotics (AREA)
- Audiology, Speech & Language Pathology (AREA)
- Mechanical Engineering (AREA)
- Biomedical Technology (AREA)
- Artificial Intelligence (AREA)
- Computing Systems (AREA)
- Data Mining & Analysis (AREA)
- Computational Linguistics (AREA)
- Mathematical Physics (AREA)
- Software Systems (AREA)
- Biophysics (AREA)
- Molecular Biology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Evolutionary Computation (AREA)
- Multimedia (AREA)
- Toys (AREA)
- User Interface Of Digital Computer (AREA)
- Manipulator (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
Description
対話ロボットに組み込まれる音声対話装置であって、
前記対話ロボットの目の位置に配置され、前記対話ロボットの目を表示する表示部と、
前記対話ロボットと対話相手との間の距離を測定する距離測定部と、
前記距離測定部により測定された距離が所定距離未満である場合に前記表示部に表示される前記対話ロボットの瞳孔の大きさを、前記測定された距離が前記所定距離以上である場合に前記表示部に表示される前記瞳孔の大きさよりも大きくする目制御部と、を備える。
対話ロボットに組み込まれる音声対話装置の制御方法であって、
前記対話ロボットと対話相手との間の距離を測定し、
前記測定された距離が所定距離未満である場合に表示部に表示される前記対話ロボットの瞳孔の大きさを、前記測定された距離が前記所定距離以上である場合に前記表示部に表示される前記瞳孔の大きさよりも大きくする。
(1)実施の形態1
(1−1)実施の形態1の構成
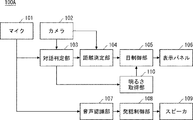
まず、本実施の形態1の構成について説明する。図1は、本実施の形態1に係る音声対話装置100の構成例を示すブロック図である。図2は、本実施の形態1に係る音声対話装置100が組み込まれる対話ロボット200の外観構成例を示す図である。図2に示される対話ロボット200は、動物型のロボットになっている。ただし、対話ロボット200の外観構成はこれに限定されない。
カメラ102は、対話相手及び対話相手周辺の画像を撮影する。本実施の形態1では、カメラ102は、対話ロボット200の鼻の位置に配置されている。ただし、カメラ102の配置位置はこれに限定されない。
発話制御部108は、音声認識部107により対話相手の発話音声が音声認識された場合、対話相手の発話音声に対する応答文を生成する。例えば、発話制御部108は、対話相手の発話内容と、これに対する応答文と、を予め対応付けたデータベースを保持し、このデータベースを用いて、対話相手の発話内容に応じた応答文を生成することが考えられる。しかし、応答文の生成方法は、本発明の本質的なものではなく、周知な種々の方法を利用することができる。
スピーカ109は、発話制御部108により生成された応答文を音声出力する。
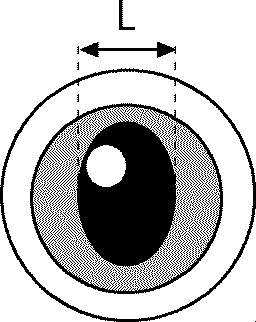
図5に示されるように、瞳孔の横方向の幅を瞳孔の大きさLとする。Lは、以下の数式(1)で導出される。
L=A×Lmax・・・(1)
ここで、Aは瞳孔の開き率[%]、Lmaxは瞳孔の大きさの最大値である。
図6に、A=100%、50%、10%である場合のそれぞれの瞳孔の例を示す。A=100%である場合の瞳孔の大きさLが、最大値Lmaxとなる。
A=dk・・・(2)
ここで、dkは、対話相手との間の距離に応じて決まる瞳孔の開き率[%]である。
続いて、本実施の形態1の動作について説明する。図7は、本実施の形態1に係る音声対話装置100における対話ロボット200の目の制御に関連する動作例を示すフローチャートである。
上述のように、本実施の形態1に係る音声対話装置100は、対話ロボット200と対話相手との間の距離を測定し、対話相手との間の距離が所定距離未満である場合に表示パネル106に表示される対話ロボット200の瞳孔の大きさを、対話相手との間の距離が所定距離以上である場合に表示パネル106に表示される対話ロボット200の瞳孔の大きさよりも大きくする。従って、対話相手が対話ロボット200に近づいてきて、対話相手との間の距離が所定距離未満になると、対話ロボット200の瞳孔の大きさが大きくなる。これにより、対話ロボット200は、動物らしい挙動を取ることができるようになるため、対話ロボット200が対話相手に与えてしまう無機質な感覚を低減することができる。また、対話相手に対し、対話ロボット200が対話相手の振る舞いを認識していることを示すことができる。そのため、対話相手は、対話ロボット200に対する親近感や愛着を持つことができるようになる。
実際の動物(例えば、猫等)は、その動物が位置している場所の明るさに応じて瞳孔の大きさが変化する。
本実施の形態2は、表示パネル106に表示される対話ロボット200の瞳孔の大きさを、対話ロボット200が設置されている設置環境の明るさによっても変化させるものである。
まず、本実施の形態2の構成について説明する。図8は、本実施の形態2に係る音声対話装置100Aの構成例を示すブロック図である。なお、本実施の形態2に係る音声対話装置100Aは、実施の形態1に係る音声対話装置100と同様に、例えば、図2に示される対話ロボット200に組み込まれるものとする。
本実施の形態2では、瞳孔の大きさLは、実施の形態1と同様に、上述の数式(1)で導出される。
ただし、本実施の形態2では、瞳孔の大きさLは、対話相手との間の距離及び設置環境の明るさを基に決定される。そのため、Aは、以下の数式(3)で導出される。
A=dk×cm・・・(3)
ここで、cmは、設置環境の明るさに応じて決まる瞳孔の開き率[%]である。
続いて、本実施の形態2の動作について説明する。図9は、本実施の形態2に係る音声対話装置100Aにおける対話ロボット200の目の制御に関連する動作例を示すフローチャートである。図9に示される処理は、図7を参照して説明した実施の形態1における処理と比較して、ステップS201を追加した点が異なっている。
上述のように、本実施の形態2に係る音声対話装置100Aは、対話ロボット200が設置されている設置環境の明るさを取得し、設置環境の明るさが所定の明るさ未満である場合に表示パネル106に表示される対話ロボット200の瞳孔の大きさを、設置環境の明るさが所定の明るさ以上である場合に表示パネル106に表示される対話ロボット200の瞳孔の大きさよりも大きくする。従って、対話ロボット200は、設置環境の明るさに応じて瞳孔の大きさが変化することになる。そのため、対話ロボット200は、より動物に近い挙動を取ることができるようになる。
その他の効果は、実施の形態1と同様である。
実施の形態2は、対話ロボット200の設置環境の明るさを取得し、取得した明るさに応じて、表示パネル106に表示される対話ロボット200の瞳孔の大きさを変化させていた。しかし、対話ロボット200の設置環境の明るさは、設置環境によっては、明るさを取得するまでもなく、時間帯に応じて決まる場合もあると考えられる。
本実施の形態3は、表示パネル106に表示される対話ロボット200の瞳孔の大きさを、時間帯によっても変化させるものである。
まず、本実施の形態3の構成について説明する。図10は、本実施の形態3に係る音声対話装置100Bの構成例を示すブロック図である。なお、本実施の形態3に係る音声対話装置100Bは、実施の形態1に係る音声対話装置100と同様に、例えば、図2に示される対話ロボット200に組み込まれるものとする。
本実施の形態3では、瞳孔の大きさLは、実施の形態1と同様に、上述の数式(1)で導出される。
ただし、本実施の形態3では、瞳孔の大きさLは、対話相手との間の距離及び現在の時刻が属する時間帯を基に決定される。そのため、Aは、以下の数式(4)で導出される。
A=dk×Ti・・・(4)
ここで、Tiは、時間帯に応じて決まる瞳孔の開き率[%]である。
続いて、本実施の形態3の動作について説明する。図12は、本実施の形態3に係る音声対話装置100Bにおける対話ロボット200の目の制御に関連する動作例を示すフローチャートである。図12に示される処理は、図7を参照して説明した実施の形態1における処理と比較して、ステップS301を追加した点が異なっている。
上述のように、本実施の形態3に係る音声対話装置100Bは、現在の時刻が、朝、昼、夜の時間帯のどれに属するか判定し、判定された時間帯が明るい時間帯である場合に比べて、判定された時間帯が暗い時間帯である場合の方が、表示パネル106に表示される対話ロボット200の瞳孔の大きさを大きくする。ここで、設置環境によっては、時間帯に応じて明るさが決まる場合がある。従って、対話ロボット200は、設置環境によっては、時間帯、すなわち設置環境の明るさに応じて、瞳孔の大きさが変化することになる。そのため、対話ロボット200は、より動物に近い挙動を取ることができるようになる。また、対話ロボット200は、時間帯に応じて瞳孔の大きさが変化するため、対話相手には、対話相手と共に生活する家族であるという感覚を与えることができる。
その他の効果は、実施の形態1と同様である。
本実施の形態4は、表示パネル106に表示される対話ロボット200の瞳孔の大きさを、対話ロボット200の内部感情によっても変化させるものである。
まず、本実施の形態4の構成について説明する。図13は、本実施の形態4に係る音声対話装置100Cの構成例を示すブロック図である。なお、本実施の形態4に係る音声対話装置100Cは、実施の形態1に係る音声対話装置100と同様に、例えば、図2に示される対話ロボット200に組み込まれるものとする。
本実施の形態4では、瞳孔の大きさLは、実施の形態1と同様に、上述の数式(1)で導出される。
ただし、本実施の形態4では、瞳孔の大きさLは、対話相手との間の距離及び対話ロボット200の内部感情を基に決定される。そのため、Aは、以下の数式(5)で導出される。
A=dk×ej・・・(5)
ここで、ejは、対話ロボット200の内部感情に応じて決まる瞳孔の開き率[%]である。ejの例を、以下の表3に示す。
続いて、本実施の形態4の動作について説明する。図15は、本実施の形態4に係る音声対話装置100Cにおける対話ロボット200の目の制御に関連する動作例を示すフローチャートである。図15に示される処理は、図7を参照して説明した実施の形態1における処理と比較して、ステップS401を追加した点が異なっている。
上述のように、本実施の形態4に係る音声対話装置100Cは、対話ロボット200の内部感情を決定し、決定された内部感情に応じて、表示パネル106に表示される対話ロボット200の瞳孔の大きさを変化させる。従って、対話ロボット200は、対話相手の発話内容に応じて瞳孔の大きさが変化することになる。そのため、対話ロボット200が対話相手の発話内容を認識していることを、対話相手に示すことができる。そのため、対話相手は、より対話ロボット200に対する親近感や愛着を持つことができるようになる。
その他の効果は、実施の形態1と同様である。
200 対話ロボット
101 マイク
102 カメラ
103 対話判定部
104 距離測定部
105 目制御部
106 表示パネル
107 音声認識部
108 発話制御部
109 スピーカ
110 明るさ取得部
111 時間帯判定部
112 感情決定部
Claims (7)
- 対話ロボットに組み込まれる音声対話装置であって、
前記対話ロボットの目の位置に配置され、前記対話ロボットの目を表示する表示部と、
前記対話ロボットと対話相手との間の距離を測定する距離測定部と、
前記距離測定部により測定された距離が所定距離未満である場合に前記表示部に表示される前記対話ロボットの瞳孔の大きさを、前記測定された距離が前記所定距離以上である場合に前記表示部に表示される前記瞳孔の大きさよりも大きくする目制御部と、を備える、音声対話装置。 - 前記目制御部は、
前記測定された距離が前記所定距離未満の範囲内では、前記測定された距離が長い場合に比べて、前記測定された距離が短い場合の方が、前記表示部に表示される前記瞳孔の大きさを大きくする、請求項1に記載の音声対話装置。 - 前記対話ロボットが設置されている設置環境の明るさを取得する明るさ取得部をさらに備え、
前記目制御部は、
前記明るさ取得部により取得された設置環境の明るさが所定の明るさ未満である場合に前記表示部に表示される前記瞳孔の大きさを、前記取得された設置環境の明るさが前記所定の明るさ以上である場合に前記表示部に表示される前記瞳孔の大きさよりも大きくする、請求項1又は2に記載の音声対話装置。 - 現在の時刻が、予め設定された複数の時間帯のどれに属するか判定する時間帯判定部をさらに備え、
前記目制御部は、
前記複数の時間帯の各々の明るさのデータを保持しており、
前記時間帯判定部により判定された時間帯が明るい時間帯である場合に比べて、前記判定された時間帯が暗い時間帯である場合の方が、前記表示部に表示される前記瞳孔の大きさを大きくする、請求項1又は2に記載の音声対話装置。 - 前記対話ロボットの内部感情を決定する感情決定部をさらに備え、
前記目制御部は、
前記感情決定部により決定された内部感情に応じて、前記表示部に表示される前記瞳孔の大きさを変化させる、請求項1から4のいずれか1項に記載の音声対話装置。 - 前記目制御部は、
前記感情決定部により決定された内部感情を強調する装飾画像を前記表示部に表示するよう制御する、請求項5に記載の音声対話装置。 - 対話ロボットに組み込まれる音声対話装置の制御方法であって、
前記対話ロボットと対話相手との間の距離を測定し、
前記測定された距離が所定距離未満である場合に表示部に表示される前記対話ロボットの瞳孔の大きさを、前記測定された距離が前記所定距離以上である場合に前記表示部に表示される前記瞳孔の大きさよりも大きくする、制御方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016196556A JP6515899B2 (ja) | 2016-10-04 | 2016-10-04 | 音声対話装置及びその制御方法 |
| US15/677,140 US10464215B2 (en) | 2016-10-04 | 2017-08-15 | Voice interaction device and control method therefor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016196556A JP6515899B2 (ja) | 2016-10-04 | 2016-10-04 | 音声対話装置及びその制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018057554A JP2018057554A (ja) | 2018-04-12 |
| JP6515899B2 true JP6515899B2 (ja) | 2019-05-22 |
Family
ID=61756926
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016196556A Active JP6515899B2 (ja) | 2016-10-04 | 2016-10-04 | 音声対話装置及びその制御方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10464215B2 (ja) |
| JP (1) | JP6515899B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110216687A (zh) * | 2019-04-29 | 2019-09-10 | 金华市盘古信息技术有限公司 | 一种机器人自动聊天方法、装置、设备及存储介质 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2020195292A1 (ja) * | 2019-03-26 | 2020-10-01 | ||
| GB2632451A (en) * | 2023-08-09 | 2025-02-12 | Sony Interactive Entertainment Inc | Apparatus, systems and methods for eye tracking calibration |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11179061A (ja) * | 1997-12-01 | 1999-07-06 | Chin Kyo | Lcdの目を持つぬいぐるみ人形 |
| JP2002136672A (ja) * | 2000-11-01 | 2002-05-14 | Heiwa Corp | 遊技機の装飾部品の取付方法および取付装置 |
| JP2003251580A (ja) * | 2002-02-28 | 2003-09-09 | Matsushita Electric Ind Co Ltd | 人工目およびそれを用いたロボット |
| JP2003281923A (ja) * | 2002-03-27 | 2003-10-03 | Toto Ltd | 照明器具及び照明方法 |
| JP3632099B2 (ja) | 2002-12-17 | 2005-03-23 | 独立行政法人科学技術振興機構 | ロボット視聴覚システム |
| US20090030552A1 (en) | 2002-12-17 | 2009-01-29 | Japan Science And Technology Agency | Robotics visual and auditory system |
| ATE522330T1 (de) | 2005-09-30 | 2011-09-15 | Irobot Corp | Robotersystem mit kabelloser kommunikation mittels tcp/ip übertragung |
| JP2008067777A (ja) * | 2006-09-12 | 2008-03-27 | Good House:Kk | 玩具装置 |
| US7485025B2 (en) * | 2006-12-08 | 2009-02-03 | Disney Enterprises, Inc. | Expressive eyes with dilating and constricting pupils |
| JP2009207730A (ja) * | 2008-03-05 | 2009-09-17 | Sega Toys:Kk | 表示玩具 |
| JP2010176170A (ja) * | 2009-01-27 | 2010-08-12 | Sony Ericsson Mobilecommunications Japan Inc | 表示装置、表示制御方法および表示制御プログラム |
| JP2013003221A (ja) * | 2011-06-14 | 2013-01-07 | Tomy Co Ltd | 楽音出力装置 |
| US9358475B2 (en) * | 2013-12-12 | 2016-06-07 | Beatbots, LLC | Robot |
| US10129510B2 (en) * | 2016-02-18 | 2018-11-13 | Samsung Electronics Co., Ltd. | Initiating human-machine interaction based on visual attention |
| CN109153127B (zh) * | 2016-03-28 | 2022-05-31 | Groove X 株式会社 | 执行迎接行为的行为自主型机器人 |
| WO2017175559A1 (ja) * | 2016-04-08 | 2017-10-12 | Groove X株式会社 | 人見知りする自律行動型ロボット |
| WO2017195700A1 (ja) * | 2016-05-12 | 2017-11-16 | Groove X株式会社 | 緊急停止機能を有する自律行動型ロボット |
| WO2017199662A1 (ja) * | 2016-05-20 | 2017-11-23 | Groove X株式会社 | 自律行動型ロボット及びコンピュータプログラム |
| JP6572943B2 (ja) * | 2017-06-23 | 2019-09-11 | カシオ計算機株式会社 | ロボット、ロボットの制御方法及びプログラム |
-
2016
- 2016-10-04 JP JP2016196556A patent/JP6515899B2/ja active Active
-
2017
- 2017-08-15 US US15/677,140 patent/US10464215B2/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110216687A (zh) * | 2019-04-29 | 2019-09-10 | 金华市盘古信息技术有限公司 | 一种机器人自动聊天方法、装置、设备及存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018057554A (ja) | 2018-04-12 |
| US10464215B2 (en) | 2019-11-05 |
| US20180093381A1 (en) | 2018-04-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11217240B2 (en) | Context-aware control for smart devices | |
| US10433052B2 (en) | System and method for identifying speech prosody | |
| US10664741B2 (en) | Selecting a behavior of a virtual agent | |
| JP7424285B2 (ja) | 情報処理システム、情報処理方法、および記録媒体 | |
| US20200073122A1 (en) | Display System | |
| CA2421746C (en) | Emotion detecting method and system | |
| EP3923198A1 (en) | Method and apparatus for processing emotion information | |
| JP6731631B2 (ja) | 認知機能評価装置、プログラム | |
| US20180182375A1 (en) | Method, system, and apparatus for voice and video digital travel companion | |
| KR20210132059A (ko) | 발성 프레젠테이션 평가 시스템 | |
| JP6544333B2 (ja) | コミュニケーション装置 | |
| JP2012146216A (ja) | 電子機器および電子機器の制御プログラム | |
| JP2022539355A (ja) | 適応ダイアライゼーションモデルおよびユーザインタフェース | |
| US11682389B2 (en) | Voice conversation system, control system for voice conversation system, and control program, and control method | |
| JP6515899B2 (ja) | 音声対話装置及びその制御方法 | |
| KR20170049799A (ko) | 사용자의 상태에 따라 디스플레이 색상이 변하는 스마트 워치 | |
| JP2012146209A (ja) | 電子機器および電子機器の制御プログラム | |
| WO2017168260A1 (ja) | 情報処理装置、プログラム及び情報処理システム | |
| KR102051217B1 (ko) | 생체 모방 기반 동물형 로봇의 감정표현 제어 장치 및 방법 | |
| CN112948622A (zh) | 一种展示内容的控制方法及装置 | |
| KR102228066B1 (ko) | 인지 장애인 돌봄 서비스 방법 및 시스템 | |
| US20210216589A1 (en) | Information processing apparatus, information processing method, program, and dialog system | |
| JP2024006873A (ja) | プログラム、方法、情報処理装置 | |
| JP6891732B2 (ja) | 情報処理装置、情報処理方法、及び、プログラム | |
| JP2012146208A (ja) | 電子機器および電子機器の制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180817 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180828 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190319 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190401 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6515899 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |