JP6516664B2 - 基板保持装置、塗布装置、基板保持方法 - Google Patents
基板保持装置、塗布装置、基板保持方法 Download PDFInfo
- Publication number
- JP6516664B2 JP6516664B2 JP2015244892A JP2015244892A JP6516664B2 JP 6516664 B2 JP6516664 B2 JP 6516664B2 JP 2015244892 A JP2015244892 A JP 2015244892A JP 2015244892 A JP2015244892 A JP 2015244892A JP 6516664 B2 JP6516664 B2 JP 6516664B2
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- pressing
- mounting surface
- holding device
- substrate holding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B05—SPRAYING OR ATOMISING IN GENERAL; APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05C—APPARATUS FOR APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05C13/00—Means for manipulating or holding work, e.g. for separate articles
- B05C13/02—Means for manipulating or holding work, e.g. for separate articles for particular articles
Landscapes
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Coating Apparatus (AREA)
- Supply And Installment Of Electrical Components (AREA)
Description
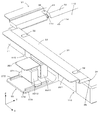
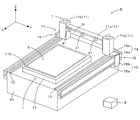
11…ステージ
110…載置面
2…位置調整機構
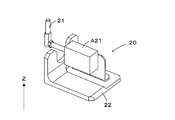
21…アライメントピン
P1…当接位置
P2…離間位置
3…押圧機構
31…押圧部材
32…切り欠き部
33…フレーム
34…接触平板
35…接触平面
H1…本押圧高さ
H2…仮押圧高さ
L1…進出位置
L2…退避位置
112…エア供給部
113…エア吸引部
5…塗布装置
6…スリットノズル
S…基板
Claims (12)
- 基板が載置面に載置される載置台と、
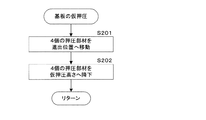
前記載置面上の前記基板の周縁に対して当接する当接位置と離間する離間位置との間で移動可能な位置調整部材を、前記載置面に前記基板が載置された状態で前記離間位置から前記当接位置へ移動させることで前記載置面上での前記基板の位置を調整する位置調整処理を実行する位置調整機構と、
前記載置面上の前記基板を前記載置面に押圧することで前記基板の形状を前記載置面の形状に沿わせる本押圧位置と、前記本押圧位置よりも前記載置面から離れて前記載置面上の前記基板に対向する仮押圧位置とに選択的に押圧部材を位置させる押圧機構と、
前記位置調整部材を前記離間位置に位置させつつ前記押圧部材を前記載置面上の前記基板へ向けて移動させて前記仮押圧位置に位置させてから前記位置調整機構に前記位置調整処理を実行させ、前記位置調整処理の完了後に前記押圧部材を前記本押圧位置に移動させる制御部と
を備える基板保持装置。 - 請求項1に記載の基板保持装置であって、
前記載置面で開口するブロー孔から前記載置面上の前記基板へガスをブローするガスブロー機構をさらに備え、
前記制御部は、前記ガスブロー機構に前記基板へガスをブローさせつつ前記位置調整機構に前記位置調整処理を実行させる基板保持装置。 - 請求項1または2に記載の基板保持装置であって、
前記位置調整機構は、前記載置面上の前記基板を取り囲むように配置された複数の前記位置調整部材を、前記各位置調整部材について設けられた前記離間位置から前記当接位置へ移動させることで前記位置調整処理を実行する基板保持装置。 - 請求項1ないし3のいずれか一項に記載の基板保持装置であって、
前記載置面に開口する吸着孔からガスを吸引することで前記載置面上の前記基板を前記載置面に吸着する吸着機構をさらに備え、
前記制御部は、前記押圧部材を前記本押圧位置に移動させた後に、前記吸着機構に前記基板を吸着させる基板保持装置。 - 請求項1ないし4のいずれか一項に記載の基板保持装置であって、
前記押圧機構は、前記基板の周長の3分の2以上の範囲で前記基板の周縁部を前記押圧部材により押圧する基板保持装置。 - 請求項1ないし5のいずれか一項に記載の基板保持装置であって、
前記押圧部材は、その接触面で前記載置面上の前記基板に接触し、
前記位置調整部材は、前記載置面から突出するように設けられ、
前記位置調整部材の前記載置面から突出した先端と前記載置面との間に、前記仮押圧位置に位置する前記押圧部材の接触面が位置する基板保持装置。 - 請求項1ないし6のいずれか一項に記載の基板保持装置であって、
前記押圧機構は、複数の前記押圧部材により前記基板の表面の異なる範囲を押圧する基板保持装置。 - 請求項7に記載の基板保持装置であって、
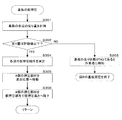
前記載置面に載置された前記基板の表面と前記載置面との間隔に応じた値を示す指標値を前記基板の表面の異なる部分について取得する取得部をさらに備え、
前記制御部は、前記押圧部材を前記載置面上の前記基板へ向けて移動させて前記仮押圧位置に位置させる仮押圧動作を前記各押圧部材に実行させる順序を前記指標値に基づいて決定し、当該順序で前記各押圧部材に前記仮押圧動作を実行させる基板保持装置。 - 請求項8に記載の基板保持装置であって、
前記制御部は、前記指標値が取得された前記基板の表面の各部分のうち、前記指標値が最大となる特定部分を特定し、前記複数の押圧部材のうち前記特定部分に最近接の範囲を押圧する押圧部材を含む一部の押圧部材に、当該一部の押圧部材とは異なる他の押圧部材より先に前記仮押圧動作を実行させると決定する基板保持装置。 - 請求項9に記載の基板保持装置であって、
前記基板の形状は四角形状であり、
前記押圧機構は、前記基板の異なる辺に対応して設けられた4個の前記押圧部材のそれぞれに、前記基板の対応する辺に沿った範囲を押圧させ、
前記制御部は、前記基板の4辺のうち前記指標値が最大となる特定辺を前記特定部分として特定し、前記4個の押圧部材のうち、前記特定辺および前記特定辺の対辺に対応する2個の押圧部材に、当該2個の押圧部材とは異なる他の押圧部材より先に前記仮押圧動作を実行させると決定する基板保持装置。 - 請求項1ないし10のいずれか一項に記載の基板保持装置と、
前記基板保持装置により保持された基板に向けて塗布液を吐出するノズルと
を備える塗布装置。 - 載置台の載置面上に載置された基板の周縁に対して当接する当接位置と離間する離間位置との間で移動可能な位置調整部材を前記離間位置に位置させる工程と、
前記載置面上の前記基板を前記載置面に押圧することで前記基板の形状を前記載置面の形状に沿わせる本押圧位置と、前記本押圧位置よりも前記載置面から離れて前記載置面上の前記基板に対向する仮押圧位置とに選択的に位置する押圧部材を、前記載置面上の前記基板へ向けて移動させて前記仮押圧位置に位置させる工程と、
前記位置調整部材を前記離間位置から前記当接位置へ移動させることで前記載置面上での前記基板の位置を調整する位置調整処理を実行する工程と、
前記位置調整処理の完了後に前記押圧部材を前記本押圧位置に移動させる工程と
を含む基板保持方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015244892A JP6516664B2 (ja) | 2015-12-16 | 2015-12-16 | 基板保持装置、塗布装置、基板保持方法 |
| TW105137342A TWI595594B (zh) | 2015-12-16 | 2016-11-16 | Substrate holding device, coating device, substrate holding method |
| CN201611034274.8A CN106994431B (zh) | 2015-12-16 | 2016-11-16 | 基板保持装置、涂布装置、基板保持方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015244892A JP6516664B2 (ja) | 2015-12-16 | 2015-12-16 | 基板保持装置、塗布装置、基板保持方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017112197A JP2017112197A (ja) | 2017-06-22 |
| JP6516664B2 true JP6516664B2 (ja) | 2019-05-22 |
Family
ID=59080920
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015244892A Active JP6516664B2 (ja) | 2015-12-16 | 2015-12-16 | 基板保持装置、塗布装置、基板保持方法 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP6516664B2 (ja) |
| CN (1) | CN106994431B (ja) |
| TW (1) | TWI595594B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12600014B2 (en) | 2024-05-21 | 2026-04-14 | Orc Manufacturing Co., Ltd. | Method and apparatus for holding substrate |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019168315A (ja) * | 2018-03-23 | 2019-10-03 | 三菱電機株式会社 | 測定装置、回路基板、表示装置、および測定方法 |
| JP6875357B2 (ja) * | 2018-11-29 | 2021-05-26 | 株式会社Screenホールディングス | 基板保持装置、基板処理装置および基板保持方法 |
| JP6869279B2 (ja) * | 2019-02-19 | 2021-05-12 | 株式会社Screenホールディングス | 基板処理装置および基板処理方法 |
| TWI798367B (zh) * | 2019-02-26 | 2023-04-11 | 日商東麗工程股份有限公司 | 塗布裝置 |
| JP7329997B2 (ja) * | 2019-07-09 | 2023-08-21 | 日本特殊陶業株式会社 | 静電チャック装置 |
| JP7688884B2 (ja) * | 2020-08-28 | 2025-06-05 | Aiメカテック株式会社 | 基板処理装置、及び基板処理方法 |
| JP7183223B2 (ja) | 2020-08-28 | 2022-12-05 | 株式会社Screenホールディングス | 基板処理装置および基板処理方法 |
| JP7597462B2 (ja) * | 2020-11-16 | 2024-12-10 | 東京エレクトロン株式会社 | 基板保持機構及び基板載置方法 |
| CN116288224B (zh) * | 2023-03-21 | 2025-05-23 | 深圳市矩阵多元科技有限公司 | 一种等离子体设备 |
| JP2025127534A (ja) * | 2024-02-21 | 2025-09-02 | 株式会社Screenホールディングス | 基板保持装置、基板処理装置および基板保持方法 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004235386A (ja) * | 2003-01-30 | 2004-08-19 | Sharp Corp | 位置決めテーブルおよび位置決め方法 |
| JP2006170733A (ja) * | 2004-12-15 | 2006-06-29 | Sharp Corp | 基板位置決め保持方法及び装置 |
| JP2008078304A (ja) * | 2006-09-20 | 2008-04-03 | Olympus Corp | 基板保持機構およびそれを用いた基板検査装置 |
| JP5429523B2 (ja) * | 2008-09-12 | 2014-02-26 | 株式会社ダイフク | 基板用収納容器 |
| JP2010087343A (ja) * | 2008-10-01 | 2010-04-15 | Toray Eng Co Ltd | 基板処理装置及び基板載置方法 |
| JP5812990B2 (ja) * | 2010-06-15 | 2015-11-17 | 電気化学工業株式会社 | 透光性硬質基板積層体の製造方法 |
| JP5670208B2 (ja) * | 2011-01-13 | 2015-02-18 | 株式会社ディスコ | 樹脂塗布装置 |
| JP5398785B2 (ja) * | 2011-06-20 | 2014-01-29 | 株式会社東芝 | スパイラル塗布装置及びスパイラル塗布方法 |
| JP5877005B2 (ja) * | 2011-07-29 | 2016-03-02 | 株式会社Screenホールディングス | 基板処理装置、基板保持装置、および、基板保持方法 |
| JP2013168461A (ja) * | 2012-02-15 | 2013-08-29 | Tokyo Electron Ltd | 基板処理装置及び基板処理方法 |
| JP5977042B2 (ja) * | 2012-02-27 | 2016-08-24 | 株式会社Screenホールディングス | 塗布装置、基板保持装置および基板保持方法 |
| JP5681952B2 (ja) * | 2012-05-31 | 2015-03-11 | パナソニックIpマネジメント株式会社 | 塗布装置 |
-
2015
- 2015-12-16 JP JP2015244892A patent/JP6516664B2/ja active Active
-
2016
- 2016-11-16 CN CN201611034274.8A patent/CN106994431B/zh active Active
- 2016-11-16 TW TW105137342A patent/TWI595594B/zh active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12600014B2 (en) | 2024-05-21 | 2026-04-14 | Orc Manufacturing Co., Ltd. | Method and apparatus for holding substrate |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017112197A (ja) | 2017-06-22 |
| TW201724348A (zh) | 2017-07-01 |
| CN106994431B (zh) | 2019-06-04 |
| TWI595594B (zh) | 2017-08-11 |
| CN106994431A (zh) | 2017-08-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6516664B2 (ja) | 基板保持装置、塗布装置、基板保持方法 | |
| JP4652351B2 (ja) | 基板支持装置、基板支持方法 | |
| TWI743614B (zh) | 基板處理裝置及基板處理方法 | |
| JP2009147240A (ja) | 基板支持装置、基板支持方法、基板加工装置、基板加工方法、表示装置構成部材の製造方法 | |
| JP2007150280A (ja) | 基板支持装置、基板支持方法、基板加工装置、基板加工方法、表示装置構成部材の製造方法 | |
| JP4481688B2 (ja) | 基板処理装置,塗布装置、塗布方法、及び、フォトマスクの製造方法 | |
| TW201112201A (en) | Panel substrate conveyor equipment and display panel module assembly equipment | |
| TW202026169A (zh) | 單片化工件的對準 | |
| JP2008147291A (ja) | 基板支持装置、基板支持方法、基板加工装置、基板加工方法、表示装置構成部材の製造方法 | |
| KR102336820B1 (ko) | 기판 유지 장치, 기판 처리 장치 및 기판 유지 방법 | |
| CN100559281C (zh) | 曝光装置及曝光方法 | |
| JP2013125795A (ja) | 基板位置決め装置及び基板位置決め方法 | |
| CN1527661A (zh) | 为基底装夹元件的装置和这种装置的校准方法 | |
| GB2484373A (en) | Screen printing device and screen printing method | |
| JP2012023104A (ja) | 基板載置装置 | |
| KR101141806B1 (ko) | 도포 장치와 그 도포 위치 보정 방법 | |
| JP2008182002A (ja) | 基板加工装置、基板加工方法、表示装置構成部材の製造方法 | |
| WO2013039080A1 (ja) | 基板製造装置 | |
| JP2018069536A (ja) | スクライブ装置およびスクライブ方法 | |
| JP2016012580A (ja) | 膜形成装置及び膜形成方法 | |
| KR102881414B1 (ko) | 전기 검사 장치 및 전기 검사 방법 | |
| JP2014160745A (ja) | 基板製造装置 | |
| CN108687722B (zh) | 载置台及载置方法 | |
| JP6339002B2 (ja) | ステージ | |
| KR20250126410A (ko) | 지지 스테이지 장치 및 이를 이용한 기판 지지방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170725 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180626 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190318 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190326 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190416 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6516664 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |