JP6535014B2 - モーションプラットフォーム - Google Patents
モーションプラットフォーム Download PDFInfo
- Publication number
- JP6535014B2 JP6535014B2 JP2016544688A JP2016544688A JP6535014B2 JP 6535014 B2 JP6535014 B2 JP 6535014B2 JP 2016544688 A JP2016544688 A JP 2016544688A JP 2016544688 A JP2016544688 A JP 2016544688A JP 6535014 B2 JP6535014 B2 JP 6535014B2
- Authority
- JP
- Japan
- Prior art keywords
- base structure
- support platform
- payload
- elastic
- respect
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63G—MERRY-GO-ROUNDS; SWINGS; ROCKING-HORSES; CHUTES; SWITCHBACKS; SIMILAR DEVICES FOR PUBLIC AMUSEMENT
- A63G31/00—Amusement arrangements
- A63G31/16—Amusement arrangements creating illusions of travel
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B9/00—Simulators for teaching or training purposes
- G09B9/02—Simulators for teaching or training purposes for teaching control of vehicles or other craft
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B9/00—Simulators for teaching or training purposes
- G09B9/02—Simulators for teaching or training purposes for teaching control of vehicles or other craft
- G09B9/08—Simulators for teaching or training purposes for teaching control of vehicles or other craft for teaching control of aircraft, e.g. Link trainer
- G09B9/12—Motion systems for aircraft simulators
- G09B9/14—Motion systems for aircraft simulators controlled by fluid actuated piston or cylinder ram
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Business, Economics & Management (AREA)
- Physics & Mathematics (AREA)
- Educational Administration (AREA)
- Educational Technology (AREA)
- General Physics & Mathematics (AREA)
- Transmission Devices (AREA)
- Vibration Prevention Devices (AREA)
- Body Structure For Vehicles (AREA)
Description
ベース構造と、
ペイロードが載置される支持プラットフォームと、
ベース構造と支持プラットフォームの間に接続され、ベース構造に対する前後軸、横軸、及び垂直軸の6自由度を支持プラットフォームに与える複数の作動装置と、
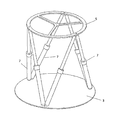
ベース構造と支持プラットフォームの間に略直立して取り付けられており、支持プラットフォーム及びペイロードの重量を支える支柱と、
ペイロードがベース構造に対して前後及び/又は横に移動するときに、反作用力を支柱に与える第1バランスアセンブリと、
ペイロードがベース構造に対して前後及び/又は横の軸回りで回転するときに、反作用力を支持プラットフォームに与える第2バランスアセンブリと、を有し、
第1バランスアセンブリ及び第2バランスアセンブリによる反作用力によって、ペイロードによる作動装置への負荷を低減する。
Claims (20)
- 支持プラットフォーム及びその上に載置できるペイロードを、ベース構造に対して中立平衡に近い状態で維持するとともに、複数の作動装置によって前記ベース構造から離れて配置された前記支持プラットフォームを、前記ベース構造に対して前後軸、横軸、及び垂直軸の6自由度で移動させることができる装置であって、
前記ベース構造と前記支持プラットフォームの間に略直立して取り付けられ、前記支持プラットフォーム及び前記ペイロードの重量を支える支柱と、
前記ペイロードが前記ベース構造に対して前後及び/又は横に移動するときに、反作用力を前記支柱に与える第1バランスアセンブリと、
前記ペイロードが前記ベース構造に対して前後及び/又は横の軸回りで回転するときに、反作用力を前記支持プラットフォームに与える第2バランスアセンブリと、を有し、
前記第1バランスアセンブリ及び前記第2バランスアセンブリによる反作用力によって、前記ペイロードによる前記作動装置への負荷を低減することを特徴とする装置。 - 前記第1バランスアセンブリは、前記支柱と前記ベース構造の間に接続された、3つ以上の弾性部材を有することを特徴とする請求項1に記載の装置。
- 前記弾性部材は、前記支柱から外側に延び、前記ベース構造の上において、略等しい距離の角度間隔で配置されていることを特徴とする請求項2に記載の装置。
- 前記ベース構造は、外側及び上方に延びる、3つ以上の設置アームを備えており、これらの設置アームは、略等しい距離の角度間隔で配置され、各弾性部材の一端は、対応する前記設置アームに固定されていることを特徴とする請求項3に記載の装置。
- 前記各弾性部材は、前記支柱と前記設置アームの間で延びる1つ以上のゴム紐を含むことを特徴とする請求項4に記載の装置。
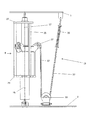
- 前記支柱は、前記ベース構造に回転可能に取り付けられたメイン収納部と、前記メイン収納部に対して垂直に移動可能なシリンダーと、を有することを特徴とする請求項5に記載の装置。
- 前記支柱は、前記メイン収納部及び前記シリンダーの周囲に位置するフレーム構造を有することを特徴とする請求項6に記載の装置。
- 前記弾性部材における1つ以上のゴム紐は、前記支柱の前記フレーム構造に固定されていることを特徴とする請求項7に記載の装置。
- 前記弾性部材における1つ以上のゴム紐は、前記支柱の前記メイン収納部に固定されていることを特徴とする請求項6に記載の装置。
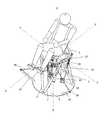
- 前記第2バランスアセンブリは、3つ以上の係留ロープを有し、前記係留ロープの第1端部が前記支持プラットフォーム又は前記ペイロードに接続され、前記係留ロープの第2端部が前記支柱に接続されていることを特徴とする請求項7に記載の装置。
- 前記係留ロープは、前記支持プラットフォーム又は前記ペイロードの上において、略等しい距離の角度間隔で配置されていることを特徴とする請求項10に記載の装置。
- 前記フレーム構造は、前記シリンダーに固定された上端及び前記メイン収納部の周囲で延びる下端を有することを特徴とする請求項11に記載の装置。
- 前記下端は、前記シリンダーが前記メイン収納部に対して垂直に移動するときに、前記メイン収納部の外表面に沿って走行する複数のローラーを有することを特徴とする請求項12に記載の装置。
- 前記各係留ロープにおける前記第2端部は、前記フレーム構造の前記下端に固定されていることを特徴とする請求項12に記載の装置。
- 前記第2バランスアセンブリは、前記メイン収納部の外表面に取り付けられた複数の上部滑車と、前記ベース構造に取り付けられた複数の下部滑車と、を有し、前記各係留ロープは、前記上部滑車の上方及び前記下部滑車の下方を通過することを特徴とする請求項13に記載の装置。
- 前記各係留ロープは、非弾性部と共に端と端を接続して配置される弾性部を有することを特徴とする請求項10に記載の装置。
- 前記係留ロープにおける前記弾性部は、1つ以上のゴム紐を有し、このゴム紐は、前記弾性部における第1取付ブロックと第2取付ブロックの間で延びることを特徴とする請求項16に記載の装置。
- 前記支持プラットフォームは、上部及び下部を有し、前記下部は、前記上部に対して回転可能であることを特徴とする請求項1から17のうちいずれか一つに記載の装置。
- 前記支持プラットフォームは、上部及び下部を有し、前記下部は、前記上部に対して回転可能であり、
前記第1取付ブロックは、前記支持プラットフォームにおける前記下部に取り付けられていることを特徴とする請求項17に記載の装置。 - ベース構造と、
ペイロードが載置される支持プラットフォームと、
前記ベース構造と前記支持プラットフォームの間に接続され、前記ベース構造に対する前後軸、横軸、及び垂直軸の6自由度を前記支持プラットフォームに与える、複数の作動装置と、
前記ベース構造と前記支持プラットフォームの間に略直立して取り付けられ、前記支持プラットフォーム及び前記ペイロードの重量を支える支柱と、
前記ペイロードが前記ベース構造に対して前後及び/又は横に移動するときに、反作用力を前記支柱に与える第1バランスアセンブリと、
前記ペイロードが前記ベース構造に対して前後及び/又は横の軸回りで回転するときに、反作用力を前記支持プラットフォームに与える第2バランスアセンブリと、を有し、
前記第1バランスアセンブリ及び前記第2バランスアセンブリによる反作用力によって、前記ペイロードによる前記作動装置への負荷を低減することを特徴とするモーションプラットフォーム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| AU2013903712A AU2013903712A0 (en) | 2013-09-26 | A motion platform | |
| AU2013903712 | 2013-09-26 | ||
| PCT/AU2014/050252 WO2015042666A1 (en) | 2013-09-26 | 2014-09-26 | A motion platform |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016533534A JP2016533534A (ja) | 2016-10-27 |
| JP6535014B2 true JP6535014B2 (ja) | 2019-06-26 |
Family
ID=52741650
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016544688A Active JP6535014B2 (ja) | 2013-09-26 | 2014-09-26 | モーションプラットフォーム |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US9545581B2 (ja) |
| EP (1) | EP3050047B1 (ja) |
| JP (1) | JP6535014B2 (ja) |
| CN (1) | CN105830132B (ja) |
| AU (1) | AU2014328486B9 (ja) |
| CA (1) | CA2925163C (ja) |
| SG (1) | SG11201602235XA (ja) |
| WO (1) | WO2015042666A1 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2533959A (en) * | 2015-01-09 | 2016-07-13 | Mclaren Applied Tech Ltd | Mobile platform |
| AT523942B1 (de) * | 2021-02-05 | 2022-01-15 | V&P Rides Gmbh | Bewegungssimulationsvorrichtung für ein Unterhaltungssystem |
| KR102144243B1 (ko) * | 2017-02-08 | 2020-08-12 | 유니버셜 시티 스튜디오스 엘엘씨 | 움직임 생성 플랫폼 조립체 |
| FR3064743B1 (fr) * | 2017-03-30 | 2019-11-08 | Philoptere | Dispositif et procede de mise en mouvement d'un objet |
| IL251922A0 (en) * | 2017-04-25 | 2017-07-31 | Duke Airborne Systems Ltd | stabilization system |
| FR3067155B1 (fr) * | 2017-06-01 | 2022-01-28 | Thales Sa | Dispositif de securisation des mouvements electriques de plateformes mobiles pour simulateurs |
| GB201811181D0 (en) | 2018-07-06 | 2018-08-29 | Dynismo Ltd | Robotic system |
| GB201811182D0 (en) | 2018-07-06 | 2018-08-29 | Dynismo Ltd | Robotic system |
| US11200812B2 (en) * | 2018-07-30 | 2021-12-14 | The Boeing Company | Miniature, portable motion platforms for simulating flight movements |
| KR102216732B1 (ko) * | 2018-12-05 | 2021-02-16 | 한국로봇융합연구원 | 하중보상 메커니즘을 적용한 모션 플랫폼의 제어방법 |
| WO2020228992A1 (en) * | 2019-05-15 | 2020-11-19 | Dynisma Ltd. | Motion generator |
| CN112306098B (zh) * | 2019-07-26 | 2024-11-12 | 王楚涵 | 水平仪、支撑用具和调节支撑用具面的承载面水平的方法 |
| JP7313079B2 (ja) | 2019-09-09 | 2023-07-24 | 国立研究開発法人科学技術振興機構 | 力覚提示装置及び力覚提示方法 |
| CN111862721B (zh) * | 2020-08-12 | 2025-03-25 | 上海科先实业发展有限公司 | 一种船舶运动多自由度模拟装置及模拟方法 |
| JP7784901B2 (ja) * | 2022-01-06 | 2025-12-12 | 三菱重工機械システム株式会社 | 揺動装置および揺動装置の制御方法 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NL8802827A (nl) * | 1988-11-16 | 1990-06-18 | Itrec Bv | Aardbevingssimulator voor een pretpark. |
| US5752834A (en) * | 1995-11-27 | 1998-05-19 | Ling; Shou Hung | Motion/force simulators with six or three degrees of freedom |
| FR2757925B1 (fr) * | 1996-12-27 | 1999-03-26 | Thomson Csf | Dispositif modulaire de mise en mouvement de charge selon au moins trois degres de liberte |
| US6247366B1 (en) * | 1997-09-15 | 2001-06-19 | Alexander J. Porter | Design maturity algorithm |
| US6035715A (en) * | 1997-09-15 | 2000-03-14 | Entela, Inc, | Method and apparatus for optimizing the design of a product |
| US6027342A (en) * | 1998-09-23 | 2000-02-22 | Stricor, Inc. | Motion platform assembly for flight and vehicle simulation |
| JP2000120824A (ja) * | 1998-10-16 | 2000-04-28 | Seiko Seiki Co Ltd | パラレルリンク機構 |
| US6038940A (en) * | 1998-12-10 | 2000-03-21 | Ross-Himes Designs, Incorporated | Controlled robotic carrier |
| US6431987B1 (en) * | 1999-11-23 | 2002-08-13 | Mts Systems Corporation | Spherical swivel with elastomeric positioning device |
| US20010041326A1 (en) * | 2000-05-12 | 2001-11-15 | Zeier Bruce E. | Simulator for aircraft flight training |
| JP4705884B2 (ja) * | 2006-06-07 | 2011-06-22 | 公益財団法人鉄道総合技術研究所 | 鉄道車両用空気ばねの試験装置 |
| EP2057614B1 (en) * | 2006-08-18 | 2016-06-29 | Zen Technologies Limited | A motion platform system |
| GB0706663D0 (en) | 2007-04-04 | 2007-05-16 | Univ Bristol | Analysis of parallel manipulators |
| NL2005293C (en) * | 2010-08-30 | 2012-03-01 | Dap Technology B V | Motion platform and aircraft simulator comprising the same. |
| CN102708723B (zh) * | 2012-05-18 | 2014-03-12 | 燕山大学 | 六自由度大承载面静平衡并联运动模拟台 |
| CN102779438B (zh) * | 2012-07-10 | 2014-06-25 | 黄力红 | 一种模拟飞机全动作仿真飞行机械执行系统 |
-
2014
- 2014-09-26 SG SG11201602235XA patent/SG11201602235XA/en unknown
- 2014-09-26 WO PCT/AU2014/050252 patent/WO2015042666A1/en not_active Ceased
- 2014-09-26 CN CN201480056653.XA patent/CN105830132B/zh active Active
- 2014-09-26 CA CA2925163A patent/CA2925163C/en active Active
- 2014-09-26 JP JP2016544688A patent/JP6535014B2/ja active Active
- 2014-09-26 US US15/024,408 patent/US9545581B2/en active Active
- 2014-09-26 EP EP14849401.6A patent/EP3050047B1/en active Active
- 2014-09-26 AU AU2014328486A patent/AU2014328486B9/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20160236100A1 (en) | 2016-08-18 |
| SG11201602235XA (en) | 2016-04-28 |
| CN105830132B (zh) | 2020-01-17 |
| EP3050047B1 (en) | 2020-05-06 |
| EP3050047A4 (en) | 2017-04-05 |
| NZ719370A (en) | 2021-01-29 |
| AU2014328486B2 (en) | 2019-03-14 |
| CA2925163C (en) | 2021-10-19 |
| CA2925163A1 (en) | 2015-04-02 |
| CN105830132A (zh) | 2016-08-03 |
| WO2015042666A1 (en) | 2015-04-02 |
| JP2016533534A (ja) | 2016-10-27 |
| EP3050047A1 (en) | 2016-08-03 |
| US9545581B2 (en) | 2017-01-17 |
| AU2014328486A1 (en) | 2016-05-12 |
| AU2014328486B9 (en) | 2019-04-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6535014B2 (ja) | モーションプラットフォーム | |
| EP2394720B1 (en) | Amusement park ride with cable-suspended vehicles | |
| US9430953B2 (en) | Simulation device with motion stabilization | |
| US9105193B2 (en) | Motion platform and aircraft simulator comprising the same | |
| US9289693B1 (en) | Motion platform for a simulation device | |
| US20220355191A1 (en) | Motion generator | |
| EP3344352B1 (en) | Motion platform | |
| EP3818513B1 (en) | Motion generator | |
| CN106563265A (zh) | 虚拟现实机器人 | |
| US20240359315A1 (en) | Motion generator | |
| WO2019069077A1 (en) | MOVEMENT DEVICE | |
| WO2016085507A1 (en) | Motion platform for a simulation device | |
| HK1227533A1 (en) | A motion platform | |
| HK1227533B (zh) | 运动平台 | |
| KR101545730B1 (ko) | 공중 케이블 놀이기구 | |
| NZ719370B2 (en) | A motion platform | |
| US20160148528A1 (en) | Simulation device with a roll mechanism | |
| KR20190115138A (ko) | 모션시뮬레이터용 수평 작동식 중력보상장치 | |
| HK1187729B (en) | Motion platform and aircraft simulator comprising the same |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160526 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170901 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180824 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180904 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180910 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190213 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190521 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190530 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6535014 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |