以下、図面を参照しながら、参考例について説明する。図1に示すように、本参考例の電源システム9は、二次電池であるバッテリ1と、バッテリ1と接続線2で接続される負荷4と、接続線2に配置されたリレー3と、コントローラ8とを含んでいる。負荷4は、バッテリ1からの電力によって駆動される機器と、バッテリ1を充電する電力を発生する発電要素を含むものである。バッテリ1には、バッテリ1の電圧Vbを検出する電圧センサ5が接続され、接続線2には、バッテリ1の電流Ibを検出する電流センサ7が接続されている。また、バッテリ1には、バッテリ1の温度Tbを検出する温度センサ6が取り付けられている。
コントローラ8は、内部に演算処理を行うCPU81と、プログラムや特性カーブ等の制御データを格納するメモリ82と、電圧センサ5、温度センサ6、電流センサ7、リレー3が接続されるセンサ・機器インターフェース83とを含み、CPU81と、メモリ82と、センサ・機器インターフェース83とがデータバス84で接続されているコンピュータである。電圧センサ5、温度センサ6、電流センサ7の検出した信号は、センサ・機器インターフェース83からコントローラ8に入力され、リレー3は、コントローラ8の指令によって開閉する。
図2は、図1に示すバッテリ1のSOCに対するOCVの特性曲線である。この特性曲線は、コントローラ8のメモリ82の中にマップとして格納されている。バッテリ1は、SOCが0%(完全放電状態)からSOC100%(満充電状態)まで上昇すると、OCVは、OCV0からOCV100まで上昇する。
図2に示すように、SOCが0%からSOC1までの間(例えば、0%〜10%の間)は、OCVはOCV0からOCV1まで変化する。ここで、OCV0とOCV1との電圧差は、満充電時のOCVであるOCV100の30〜40%程度である。したがって、OCVがOCV0からOCV1の間(SOCが0%からSOC1の間)は、SOCが変化するとOCVも変化する第2領域である。
次に、SOCが、SOC1からSOC2までの間(例えば、10%〜90%の間)は、OCVはOCV1からOCV2まで変化する。ここで、OCV1とOCV2との差は、満充電時のOCVであるOCV100の2〜3%程度である。したがって、OCVがOCV1とOCV2との間(SOCがSOC1とSOC2との間)は、SOCが変化してもOCVがほとんど変化しない第1領域である。
そして、SOCがSOC2から100%までの間(例えば、90%〜100%の間)は、OCVはOCV2からOCV100まで変化する。ここで、OCV2とOCV100との電圧差は、満充電時のOCVであるOCV100の10〜20%程度である。したがって、OCVがOCV2からOCV100までの間(SOCがSOC2から100%までの間)は、SOCが変化するとOCVも変化する第2領域である。
以上、説明したように、バッテリ1は、OCVがOCV0からOCV1の間(SOCが0%からSOC1の間)と、OCVがOCV2からOCV100までの間(SOCがSOC2から100%までの間)は、SOCが変化するとOCVも変化する第2領域であり、その中間のOCVがOCV1とOCV2との間(SOCがSOC1とSOC2との間)は、SOCが変化してもOCVがほとんど変化しない第1領域となっている。このように、バッテリ1は中央の第1領域と両端の第2領域を持っている。
ここで、第1領域と第2領域との区分は、OCVに基づいてSOCを精度よく推定可能かどうかで区分され、具体的には、SOCに対するOCVの変化割合で決定される。例えば、SOCが10%変化した場合のOCVの変化が1%未満、つまり、SOCに対するOCVの変化割合が1/10未満の場合にその領域を第1領域と規定し、SOCが10%変化した場合のOCVの変化が1%以上の場合、つまり、SOCに対するOCVの変化割合が1/10以上の場合にその領域を第2領域と規定しても良い。第1領域と第2領域の区分を決めるSOCに対するOCVの変化割合の閾値は、1/10に限らず、バッテリ1のSOC−OCV特性カーブに応じて、例えば、1/20〜1/50であってもよいし、逆に2/10〜5/10としてもよい。
充放電中、バッテリ1には分極による分極電圧が発生している。このため、バッテリ1の充放電電流がゼロとなった直後は、電圧センサ5の検出する電圧は、OCVではなく、OCVに分極電圧を含んだ電圧となっている。分極は時間の経過とともに解消される。分極の解消時間は、バッテリ1の温度Tbが低い程長く、バッテリ1の温度Tbが高くなるにしたがって短くなってくる。本参考例の電源システム9は、コントローラ8のメモリ82に図3に示すようなバッテリ1の温度Tbに対する分極解消時間を規定したマップを格納している。
コントローラ8は、バッテリ1の使用が開始された直後から、電流センサ7によってバッテリ1の充放電電流を検出し、その電流Ibを積算して、バッテリ1のSOCの推定を行っている。バッテリ1の使用が開始された直後とは、例えば、バッテリ1が搭載された電動車両が完成後、最初にイグニッションスイッチがオンとなった時等をいう。
次に、図4を参照しながら、以上のように構成された電源システム9におけるSOC推定値置換動作と電流センサ7のゼロ点補正動作について説明する。
図4のステップS11に示すように、コントローラ8は、図1に示すリレー3をオフにする指令を出力する。この指令によってリレー3がオフとなり、バッテリ1と負荷4との接続が遮断される。これにより、バッテリ1の充放電電流は、ゼロとなる。
次に、コントローラ8は、図4のステップS12に示すように、温度センサ6でバッテリ1の温度Tbを検出する。コントローラ8は、メモリ82から先に図3を参照して説明したバッテリ1の温度Tbに対する分極解消時間のマップからバッテリ1の分極解消時間を取得し、図4のステップS13に示すように、取得した分極解消時間だけ待機する。そして、コントローラ8は、分極解消時間が経過したら図4のステップS14に進み、電圧センサ5でバッテリ1の電圧Vbを検出する。この場合、充放電電流がゼロとなってから分極解消時間が経過しているので、電圧センサ5で検出した電圧Vbは、バッテリ1のOCVとなっている。
バッテリ1のOCVである電圧Vbを検出したら、コントローラ8はステップS15に進み、OCVである電圧Vbが、SOCに対するOCVの変化割合が所定の閾値よりも大きくなる第2領域にあるかどうかを判断する。バッテリ1の場合、先に説明したように、SOCの変化割合に対するOCVの変化割合が1/10以上となる領域が、SOCが変化するとOCVも変化し、OCVに基づいてSOCを精度よく推定可能な第2領域である。図2に示すように、OCVがOCV0からOCV1の間(SOCが0%からSOC1の間)と、OCVがOCV2からOCV100までの間(SOCがSOC2から100%までの間)の2つの領域が第2領域である。また、OCVがOCV1からOCV2の間(SOCがSOC1からSOC2の間)はSOCに対するOCVの変化割合が1/10未満で、OCVに基づいてSOCを推定することが困難な第1領域である。従って、バッテリ1のOCVである電圧VbがOCV1未満、あるいは、バッテリ1のOCVである電圧VbがOCV2を超える場合には、バッテリ1のOCVは第2領域にあり、OCVである電圧VbがOCV1≦Vb≦OCV2の場合には、バッテリ1のOCVは第1領域にあることになる。
そこで、コントローラ8は、バッテリ1のOCVである電圧VbがOCV2を超えているか、あるいは、OCV1未満の場合にバッテリ1のOCVは第2領域にあり、OCVに基づいてSOCを精度よく推定可能と判断し、図4のステップS16に進む。
コントローラ8は、図4のステップS16に示すように、ステップS14で検出したバッテリ1のOCVである電圧Vbと、メモリ82に格納した図2に示すSOC−OCVの特性マップを用いて、バッテリ1のSOCを推定する。例えば、バッテリ1の電圧Vbが図2に示すOCV3の場合、バッテリ1のSOCはマップからSOC3と推定する。そして、それまで電流積算に基づいて推定していたSOCの推定値をより精度の高いOCVによるSOCの推定値に置き換える。これにより、それまで電流積算により推定したSOCの推定誤差を解消できる。そして、それ以降は、置き換えたSOCの推定値を基準にして電流積算によるSOCの推定を行っていく。コントローラ8は、SOCの推定値の置き換えが終了したら、図4のステップS17に進む。
一方、コントローラ8は、図4のステップS15でNOと判断した場合、バッテリ1のOCVは第1領域にあり、OCVからSOCを推定することが困難と判断してステップS18に進み、OCVによるSOCの推定を行わず、それまでの電流積算により推定したSOCの値を維持してステップS17に進む。
コントローラ8は、ステップS17において電流センサ7のゼロ点補正を行う。この時点では、リレー3がオフでバッテリ1の充放電電流はゼロであるから、この状態の電流センサ7の出力をバッテリ1の電流Ibがゼロの場合の出力に補正する。これにより、電流センサ7の温度上昇等による誤差を補正することができ、電流積算に基づくSOCの推定精度を向上させることができる。
コントローラ8は、ステップS17において電流センサ7のゼロ点補正を行ったら、リレー3をオンとして通常の動作に戻る。
以上説明したように、本参考例の電源システム9は、バッテリ1のOCVが第2領域にある場合に、SOCの推定値をより精度の高いOCVによるSOCの推定値に置き換えて、それまでの電流積算により推定したSOCの推定誤差を一旦解消するとともに、電流センサ7のゼロ点補正を行ってから、次の電流積算によるSOCの推定を行うので、SOCが変化してもOCVがほとんど変化しない第1領域とSOCの変化に対してOCVが変化する第2領域とを持つバッテリ1のSOCを精度よく推定することができる。
次に、図5〜図14を参照しながら、他の参考例について説明する。まず、図5〜図13を参照しながら、本参考例が適用される車両用の電源システム100の構成と基本動作について説明する。
図5に示すように、本参考例の電源システム100は、車両駆動用バッテリであるメインバッテリ10と、メインバッテリ10の電圧を降圧する電圧変換器であるDC/DCコンバータ21と、補機バッテリ23と、補機バッテリ23の残存容量(SOC)が所定の閾値以下となった場合にDC/DCコンバータ21の出力電圧Vdcを降圧して補機バッテリ23に充電を行う充電回路30と、DC/DCコンバータ21の出力電圧Vdcが補機バッテリ23の電圧Vbよりも低くなった場合に補機バッテリ23から補機負荷22に電力供給を行う放電回路40と、コントローラ70と、を備えている。なお、図5において、一点鎖線は信号線を示す。
図5に示すように、メインバッテリ10は高圧ライン61によってインバータ12に接続され、インバータ12には車両駆動用のモータジェネレータ13が接続されている。高圧ライン61には、システムメインリレー11が配置されている。システムメインリレー11のインバータ12の側の高圧ライン61とDC/DCコンバータ21とは接続ライン63で接続されている。DC/DCコンバータ21と補機負荷22との間は、低圧ライン64で接続されている。ここで補機負荷22は、例えば、パワーステアリング装置、油圧装置、窓の開閉装置、メインバッテリ10の冷却装置等を駆動する小型モータや、照明装置等を含む。低圧ライン64の中間点54と放電回路40の出力端56とは第1補機バッテリライン65によって接続され、放電回路40の入力端55と補機バッテリ23とは第2補機バッテリライン67で接続されている。第1補機バッテリライン65の中間点52と充電回路30の入力端57との間は充電回路入力ライン66aで接続され、充電回路30の出力端58と第2補機バッテリライン67の中間点51との間は、充電回路出力ライン66bで接続されている。第2補機バッテリライン67には、補機バッテリ23の側から順に電流センサ26、ヒューズ27、補機リレー28が接続されている。また、補機リレー28と中間点51との間には、ツェナーダイオード29が接続されている。ツェナーダイオード29は、補機バッテリ23の充電を行った際に補機バッテリ23に過電圧がかかることを防止する。
このように、充電回路30は、低圧ライン64と、第1、第2補機バッテリライン65,67と、充電回路入力ライン66aと、充電回路出力ライン66bとによってDC/DCコンバータ21と補機バッテリ23との間に接続されている。充電回路30の入力端57は、充電回路30のDC/DCコンバータ21に接続されている端部であり、低圧ライン64を介して補機負荷22にも接続されている。また、放電回路40は、低圧ライン64と第1、第2補機バッテリライン65,67とによって補機負荷22と補機バッテリ23との間に接続されており、放電回路40の出力端56は、放電回路40の補機負荷22に接続されている端部であり、低圧ライン64を介してDC/DCコンバータ21にも接続されている。
充電回路30は、入力端57と出力端58との間に直列に接続された第2スイッチング素子92とリアクトル32と、第2スイッチング素子92とリアクトル32との間の接続点53とグランドとの間に接続されたコンデンサ34と第3スイッチング素子93と、第2スイッチング素子92と第3スイッチング素子93の各ゲートに接続され第2スイッチング素子92と第3スイッチング素子93のオン・オフ動作を制御する充電制御IC35と、を含んでいる。第2スイッチング素子92と第3スイッチング素子93は、それぞれ寄生ダイオード92a,93aを有している。充電回路30は、第2スイッチング素子92と第3スイッチング素子93とを交互にオン・オフ動作させて入力端57に入力された電圧を降圧して出力端58から出力する機能を有している。なお、充電回路30は、上記の様な構成にかかわらず、入力電圧を降圧して出力できる回路であれば、例えば、降圧チョッパ回路や降圧スイッチングレギュレータ等で構成してもよい。
放電回路40は、入力端55と出力端56との間に接続された第1スイッチング素子91と、第1スイッチング素子91のゲートに接続されて第1スイッチング素子91をオン・オフさせる放電制御IC42とを含んでいる。第1スイッチング素子91は寄生ダイオード91aを有している。また、放電制御IC42は、第1補機バッテリライン65の中間点52と第2補機バッテリライン67の中間点51とに接続され、各中間点51,52の電圧を検出する。中間点52の電圧はDC/DCコンバータ21の出力電圧Vdcに等しく、補機リレー28がオンの場合には中間点51の電圧は補機バッテリ23の電圧Vbに等しいから、放電制御IC42は、補機リレー28がオンの場合には、補機バッテリ23の電圧VbとDC/DCコンバータ21の出力電圧Vdcを検出する。
補機バッテリ23には、電圧Vbを検出する電圧センサ24と、温度Tbを検出する温度センサ25とが取り付けられている。
図5に示すように、DC/DCコンバータ21と、充電制御IC35と、放電制御IC42と、補機リレー28と、電圧センサ24と、温度センサ25と、電流センサ26とはコントローラ70に接続され、DC/DCコンバータ21、充電制御IC35、放電制御IC42、補機リレー28とはコントローラ70の指令によって動作する。だたし、放電制御IC42は、コントローラ70と独立して単独で第1スイッチング素子91をオン・オフすることもできる。また、電圧センサ24、温度センサ25、電流センサ26の検出した各信号はコントローラ70に入力される。さらに、放電制御IC42が検出した中間点51,52の各電圧の信号も放電制御ICからコントローラ70に入力される。コントローラ70は、内部に演算処理を行うCPU71と、制御プログラムや制御データを格納するメモリ72を含むコンピュータである。コントローラ70は、接続線68で補機バッテリ23と接続されるとともに接続線69、低圧ライン64でDC/DCコンバータ21に接続され、補機バッテリ23或いはDC/DCコンバータ21から動作電力が供給され る。また、コントローラ70のメモリ72には、先に図2、図3を参照して説明した補機バッテリ23のSOC−OCVの特性マップと、補機バッテリ23の温度Tbに対する分極解消時間のマップが格納されている。
本参考例の補機バッテリ23は、先に説明したバッテリ1と同様、図2に示すような第1領域と第2領域を含むSOC−OCV特性を持つ二次電池で構成されている。また、図6に示すように、本参考例の補機バッテリ23は、SOCが0%の電圧VbはV0であり、SOCが100%(満充電)の電圧VbはV0よりも高いV100であり、SOCが大きくなるにしたがって、電圧VbはV0からV100まで変化する。この補機バッテリ23のV0からV100までの電圧変化範囲は、補機負荷22を断続的に駆動可能な電圧範囲である。また、図6の一点鎖線は、DC/DCコンバータ21の目標出力電圧がVd0の場合の出力電圧Vdcを示す。図6に示すように、DC/DCコンバータ21の目標出力電圧Vd0は、補機バッテリ23の満充電電圧であるV100よりも高くなっている(Vdc>V100)。したがって、補機バッテリ23の電圧Vbは、DC/DCコンバータ21の目標出力電圧Vd0よりも低くなっている(Vb<Vd0)。また、DC/DCコンバータ21の目標出力電圧Vd0は、補機負荷22を連続的に駆動可能な電圧である。
以上のように構成された電源システム100の基本動作について説明する。最初に図7から図10Bを参照して補機バッテリ23の放電動作について説明する。
<放電制御>
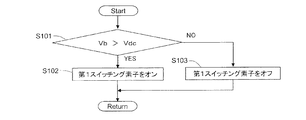
放電回路40の放電制御IC42は、補機リレー28がオンの場合に補機バッテリ23の電圧Vbに等しい中間点51の電圧と、DC/DCコンバータ21の出力電圧Vdcと等しい中間点52の電圧を検出している。そして、図7のステップS101に示すように、放電制御IC42は、補機バッテリ23の電圧VbがDC/DCコンバータ21の出力電圧Vdcよりも高い場合(Vb>Vdcの場合)には、図7のステップS102に進んで第1スイッチング素子91をオンとして補機バッテリ23を放電させ、補機バッテリ23から補機負荷22に電力を供給する。また、放電制御IC42は、図7のステップS101でNOと判断した場合、つまり、補機バッテリ23の電圧VbがDC/DCコンバータ21の出力電圧Vdc以下(Vb≦Vdc)の場合、第1スイッチング素子91をオフとして補機バッテリ23の放電を停止する。
<車両起動時の放電回路の動作>
図8に示すように、車両のスタートスイッチがオンとされて車両が起動すると、コントローラ70の指令により補機リレー28がオンとなる。すると、中間点51の電圧は補機バッテリ23の電圧Vbに等しくなる。これにより、放電制御IC42は、補機バッテリ23の電圧VbとDC/DCコンバータ21の出力電圧Vdcとを検出する。
この時点では、まだシステムメインリレー11はオフでDC/DCコンバータ21も停止しているので、DC/DCコンバータ21の出力電圧Vdcはゼロとなっている。このため、放電制御IC42は、図7のステップS101で補機バッテリ23の電圧VbがDC/DCコンバータ21の出力電圧Vdcよりも高い(Vb>Vdc)と判断して、図7のステップS102に進んで第1スイッチング素子91をオンとして補機バッテリ23を放電させ、補機バッテリ23から補機負荷22への電力供給を行う。
すると、図8の矢印R1に示すように、補機バッテリ23から補機負荷22に向かって電流が流れる。また、第1スイッチング素子91がオフからオンになるまでの間は、放電回路40の寄生ダイオード91aを通って補機バッテリ23から補機負荷22に向かって電流が流れるので、補機バッテリ23の電圧VbがDC/DCコンバータ21の出力電圧Vdcよりも高い場合には、時間遅れ無く補機バッテリ23から補機負荷22への電力供給を行うことができる。なお、車両が停止し、DC/DCコンバータ21が停止した場合も上記と同様に補機バッテリ23から補機負荷22へ電力供給を行う。
<通常走行時の放電回路の動作>
先に図8を参照して説明したように、補機バッテリ23から補機負荷22に電力が供給されると、図示しないECUが起動する。ECUは、システムメインリレー11をオンにしてメインバッテリ10とDC/DCコンバータ21とを接続する。また、コントローラ70は、DC/DCコンバータ21を起動する。DC/DCコンバータ21が動作を開始すると、図6に示すように、DC/DCコンバータ21の出力電圧Vdcは、補機バッテリ23の電圧Vbよりも高い目標出力電圧Vd0となる(Vb≦Vdc=Vd0)。すると、放電制御IC42は、図7のステップS101でNOと判断し、第1スイッチング素子91をオフとして、補機バッテリ23の放電を停止し、補機バッテリ23から補機負荷22への電力供給を停止する。
補機バッテリ23から補機負荷22への電力供給が停止されると、図9の矢印R2,R4に示すようにメインバッテリ10の電力がDC/DCコンバータ21から補機負荷22に供給される。また、図9の矢印R3に示すように、メインバッテリ10の電力は、インバータ12からモータジェネレータ13に供給され、車両は通常走行を行う。車両が通常走行を行っている間は、DC/DCコンバータ21の出力電圧Vdcは、補機バッテリ23の電圧Vbよりも高い目標出力電圧Vd0に保たれるので、放電制御IC42は、第1スイッチング素子91をオフのままとする。
このように、本参考例の電源システム100は、DC/DCコンバータ21が動作していない車両の起動時、或いは車両の停止時には、補機バッテリ23から補機負荷22に電力を供給し、DC/DCコンバータ21が動作している通常走行中は、DC/DCコンバータ21から連続的に補機負荷22への電力供給を行う。
<通常走行中の補機負荷のラッシュ電流発生時の放電回路の動作>
図10Aの時刻ゼロから時刻t1までの間のように、車両が通常走行中は、DC/DCコンバータ21の出力電圧Vdc(図10A中に一点鎖線で示す)は、補機バッテリ23の電圧Vbよりも高い目標出力電圧Vd0に保たれている。また、図10Bの時刻ゼロから時刻t1までの間のように、DC/DCコンバータ21の出力電流Idc(図10B中に一点鎖線で示す)は、補機負荷22の要求電流Ireq(図10B中に実線で示す)に等しくなっている。この時の出力電流Idcは、DC/DCコンバータ21の出力電圧Vdcが目標出力電圧Vd0の場合の上限出力電流Idmaxよりも小さい。
補機負荷22には、パワーステアリング装置、油圧装置を駆動する小型モータが含まれている。これらの小型モータは、運転者が急ハンドルや急ブレーキの操作をした場合、急速な動作をするために短時間で大きな電流(ラッシュ電流)が必要になる。このため、図10Bの時刻t1で急ハンドル或いは急ブレーキの操作がされた場合には、図10Bに実線で示すように補機負荷22の要求電流Ireqは時刻t1以降、急速に大きくなっていく。これにつれて、図10Bに一点鎖線で示すように、DC/DCコンバータ21の出力電流Idcも急速に大きくなっていく。そして、図10Bの時刻t2にDC/DCコンバータ21の出力電流Idcが上限出力電流Idmaxに達すると、図10Aの一点鎖線に示すように、DC/DCコンバータ21は、出力電圧Vdcを目標出力電圧Vd0に維持することができず、DC/DCコンバータ21の出力電圧Vdcは目標出力電圧Vd0から低下し始める。
図10Aの時刻t3にDC/DCコンバータ21の出力電圧Vdcが補機バッテリ23の電圧Vbよりも低くなった場合、つまり、補機バッテリ23の電圧VbがDC/DCコンバータ21の出力電圧Vdcよりも高くなった場合(Vb>Vdc)には、放電制御IC42は、図7のステップS101でYESと判断してステップS102に進み、第1スイッチング素子91をオンとして補機バッテリ23の放電を開始する。すると、図10Bに破線で示すように、補機バッテリ23から補機負荷22に電流Ibが流れ出す。この時、図11の矢印R4で示すように補機負荷22にはDC/DCコンバータ21から出力電流Idが流れるとともに、図11の矢印R1で示すように補機バッテリ23から電流Ibが流れる。したがって、補機負荷22にはDC/DCコンバータ21と補機バッテリ23とから電力が供給される。補機バッテリ23から補機負荷22に電力が供給されると、DC/DCコンバータ21の出力電圧Vdcは、DC/DCコンバータ21からの供給電力と補機バッテリ23からの供給電力のバランスにより、補機バッテリ23の電圧Vbよりも少し低い電圧に保たれる。
図10Bに示すように、時刻t3に急ハンドル或いは急ブレーキの操作が終わると、補機負荷22の要求電流Ireqはピーク電流Ipeakから急速に低下する。すると、図10Aに示すように、DC/DCコンバータ21の出力電圧Vdcが上昇し始め、図10Aの時刻t4に、DC/DCコンバータ21の出力電圧Vdcが補機バッテリ23の電圧Vb以上となる(Vb≦Vdc)。すると、放電制御IC42は、図7のステップS101でNOと判断して図7のステップS103に示すように、第1スイッチング素子91をオフとする。これにより、図10Bの時刻t4の後、補機バッテリ23の電流Ibはゼロとなる。また、図10Bに示す時刻t4の後、補機負荷22の要求電流Ireqは急速に低下してくるので、これにつれて、図10Aに示すようにDC/DCコンバータ21の出力電圧Vdcが上昇してくる。
そして、図10Bの時刻t5に補機負荷22の要求電流IreqがDC/DCコンバータ21の上限出力電流Idmaxよりも小さくなると、DC/DCコンバータ21の出力電圧Vdcは目標出力電圧Vd0に戻る。そして、時刻t6に車両が通常走行に戻ると、DC/DCコンバータ21の出力電圧Vdcは補機バッテリ23の電圧Vbよりも高い目標出力電圧Vd0に保たれ、放電制御IC42は、第1スイッチング素子91をオフに保つ。
以上説明したように、通常走行中に急ハンドル或いは急ブレーキの操作が行われ、補機負荷22のラッシュ電流が発生して、DC/DCコンバータ21の出力電圧Vdcが補機バッテリ23の電圧Vbよりも低くなった場合(Vb>Vdc)には、放電制御IC42は第1スイッチング素子91をオンとして補機バッテリ23を放電させて補機負荷22への供給電力をバックアップする。また、補機負荷22のラッシュ電流が発生しておらず、DC/DCコンバータ21の出力電圧Vdcが補機バッテリ23の電圧Vbよりも低くならない場合には、補機負荷22にはDC/DCコンバータ21から連続的に電力が供給される。
このように、本参考例の電源システム100は、通常走行時には、DC/DCコンバータ21から連続的に補機負荷22への電力供給を行い、補機負荷22のラッシュ電流が発生した場合には、断続的に補機バッテリ23から補機負荷22への電力供給を行い、DC/DCコンバータ21の供給電力をバックアップする。
<充電制御>
次に、図12,13を参照しながら補機バッテリ23の充電動作について説明する。コントローラ70は、補機バッテリ23の使用が開始された直後から、電流センサ26によって補機バッテリ23の充放電電流を検出し、その電流Ibを積算して、補機バッテリ23のSOCの推定を行っている。補機バッテリ23の使用が開始された直後とは、例えば、補機バッテリ23が搭載された電動車両が完成後、最初にイグニッションスイッチがオンとなった時等をいう。コントローラ70は、図12のステップS201に示すように、電流積算によって計算したSOCと、所定の閾値である充電開始閾値Caと比較する。そして、補機バッテリ23のSOCが充電開始閾値Ca以下となった場合、図12のステップS202に進み、放電制御IC42が検出した中間点51,52の電圧をそれぞれ補機バッテリ23の電圧Vb、DC/DCコンバータ21の出力電圧Vdcとして、DC/DCコンバータ21の出力電圧Vdcと補機バッテリ23の電圧Vbとを比較する。そして、図12のステップS202でDC/DCコンバータ21の出力電圧Vdcが補機バッテリ23の電圧Vb以上の場合には(Vdc≧Vb)、図12のステップS203に進み、充電制御IC35に充電回路30の起動指令を出力するとともに、放電制御IC42で検出した補機バッテリ23の電圧Vbを充電制御IC35に出力する。
充電回路30が起動したら、コントローラ70は、図12のステップS204に進み、ステップS201と同様に電流センサ26によって検出した充電電流を積算して補機バッテリ23のSOCを計算し、補機バッテリ23のSOCが充電停止閾値Cb以上になるまで充電回路30の動作を維持するとともに、充電制御IC35に放電制御IC42で検出した補機バッテリ23の電圧Vbを出力する(ステップS203)。この際、図13に示すように、DC/DCコンバータ21から充電回路30を介して補機バッテリ23に電流Ibが流れ、補機バッテリ23が充電される。そして、コントローラ70は、図12のステップS204で補機バッテリ23のSOCが充電停止閾値Cb以上となったら、ステップS205に進み、充電制御IC35に充電回路30の動作を停止する指令を出力する。
一方、コントローラ70は、図12のステップS201でNOと判断した場合、及び、図12のステップS202でNOと判断した場合には、充電回路30を起動せずに最初に戻り、ステップS201〜S205を繰り返す。
充電制御IC35は、コントローラ70からの起動指令が入力されたら、第2スイッチング素子92と第3スイッチング素子93とを交互にオン・オフさせてDC/DCコンバータ21の出力電圧Vdcを補機バッテリ23の充電電圧Vchに降圧する。充電電圧Vchは、コントローラ70から入力された補機バッテリ23の電圧Vbと同一或いは少し高い電圧である。補機バッテリ23の電圧Vbは、図6に示すようにSOCによってV0からV100まで変化するので、充電制御IC35は、コントローラ70から入力された補機バッテリ23の電圧Vbに基づいて第2スイッチング素子92と第3スイッチング素子93のデューティ比を変化させて充電電圧Vchが補機バッテリ23の電圧Vbと同一或いは少し高い電圧となるように調整する。なお、補機バッテリ23の充電電圧Vchを変化させず、図6を参照して説明した補機バッテリ23の満充電電圧であるV100として充電するようにしてもよい。
<通常走行中の補機バッテリの充電動作>
先に図9を参照して説明したと同様、車両が通常走行している場合には、図13の矢印R2,R4に示すようにメインバッテリ10の電力がDC/DCコンバータ21から補機負荷22に供給される。DC/DCコンバータ21の出力電圧Vdcは、補機バッテリ23の電圧Vbよりも高い目標出力電圧Vd0に保たれるので、放電制御IC42は、第1スイッチング素子91をオフのままとしている。充電制御IC35にコントローラ70からの起動指令が入力されると、充電制御IC35は、第2スイッチング素子92、第3スイッチング素子93を交互にオン・オフさせてDC/DCコンバータ21の出力電圧Vdcを充電電圧Vchに降圧し、図13の矢印R5に示すように補機バッテリ23に充電する。
以上説明した充電制御において、充電開始閾値Ca、充電停止閾値Cbはいろいろな値をとることが可能であるが、例えば、充電開始閾値Caは、補機バッテリ23の電圧Vbがあまり低くならないように、50〜60%程度、充電停止閾値Cbは高いほど車両停止期間を長くできるが、あまり高くすると補機バッテリ23を過充電してしまう可能性があるので、80〜90%程度としてもよい。また、先に述べたように、補機バッテリ23からの電力供給は、車両の起動時、停止時のようにDC/DCコンバータ21が停止している場合や、補機負荷22にラッシュ電流が流れる場合で、通常走行中には補機バッテリ23から補機負荷22への電力供給は行われない。このため、補機バッテリ23の放電量は少なく、必要な充電量も少ない。
<SOC推定値置換動作と電流センサのゼロ点補正動作>
次に、電源システム100におけるSOC推定値置換動作と電流センサ26のゼロ点補正動作について説明する。
図14のステップS301に示すように、コントローラ70は、充電回路30を停止する指令を出力する。この指令により、充電制御IC35は、第2スイッチング素子92、第3スイッチング素子93をオフ状態に固定し、DC/DCコンバータ21から補機バッテリ23へ充電電流が流れないようにする。
次にコントローラ70は、図14のステップS302に進み、DC/DCコンバータ21の出力目標電圧を通常のVd0よりも高いVd1(Vd1>Vd0>V100)に上昇させる。Vd0は補機バッテリ23のSOCが100%の場合の電圧V100よりも高くなっているので放電回路40を停止していなくとも、補機バッテリ23から低圧ライン64に放電電流は流れることはない。しかし、DC/DCコンバータ21の出力電圧Vdcは、補機負荷22への出力電流によっては、目標電圧のVd0よりも低下することがあるので、電流センサ26のゼロ点補正動作とSOC推定値置換動作の際に補機バッテリ23の充放電電流をできるだけゼロに保持できるように、DC/DCコンバータ21の目標電圧をVd1とする。これにより、DC/DCコンバータ21の出力電圧はVd1(>V100)となる。
コントローラ70は、ステップS303に進み、放電制御IC42が検出した中間点51,52の電圧をそれぞれ補機バッテリ23の電圧Vb、DC/DCコンバータ21の出力電圧Vdcとして、DC/DCコンバータ21の出力電圧Vdcと補機バッテリ23の電圧Vbとを比較する。そして、DC/DCコンバータ21の出力電圧Vdcが補機バッテリ23の電圧Vbよりも高い場合には、ラッシュ電流の発生が無く、補機バッテリ23の充放電電流がゼロに保たれていると判断して、ステップS305に進み、SOC推定値置換動作と電流センサ26のゼロ点補正動作を行う。
一方、コントローラ70は、ステップS303でNOと判断した場合には、ラッシュ電流が発生し、補機バッテリ23から補機負荷22への放電が行われており、補機バッテリ23の充放電電流がゼロに保たれていないと判断して、ステップS304に進み、ラッシュ電流が収束するまでの所定時間だけ待機してから、再度、ステップS303を実行する。そして、コントローラ70は、ステップS303でYESと判断したら、ステップS305に進み、SOC推定値置換動作と電流センサ26のゼロ点補正動作を行う。
ステップS305に進んだら、コントローラ70は、温度センサ25によって補機バッテリ23の温度Tbを検出する。そして、検出した温度Tbとメモリ72に格納している補機バッテリ23の温度Tbと分極解消時間との関係を示すマップ(図3に示すマップ)とから、補機バッテリ23の分極解消時間を取得し、図14のステップS306に示すように、分極解消時間が経過するまで待機する。そして、分極解消時間が経過したら、コントローラ70は、図14のステップS307に示すように、電圧センサ24によって補機バッテリ23の電圧Vbを検出する。この際、補機バッテリ23の電流Ibはゼロに保たれており、電流Ibがゼロになってから分極解消時間が経過しているので、電圧センサ24の検出する電圧Vbは、補機バッテリ23のOCVとなる。
補機バッテリ23のOCVである電圧Vbを検出したら、コントローラ70はステップS308に進み、電圧Vbが、SOCに対するOCVの変化割合が所定の閾値よりも大きくなる第2領域にあるかどうかを判断する。補機バッテリ23の場合、先に説明したように、SOCの変化割合に対するOCVの変化割合が1/10以上となる領域が、SOCが変化するとOCVも変化し、OCVに基づいてSOCを精度よく推定可能な第2領域である。図2に示すように、OCVがOCV0からOCV1の間(SOCが0%からSOC1の間)と、OCVがOCV2からOCV100までの間(SOCがSOC2から100%までの間)の2つの領域が第2領域である。また、OCVがOCV1からOCV2の間(SOCがSOC1からSOC2の間)はSOCに対するOCVの変化割合が1/10未満で、OCVに基づいてSOCを推定することが困難な第1領域である。従って、補機バッテリ23のOCVである電圧VbがOCV1未満、あるいは、補機バッテリ23のOCVである電圧VbがOCV2を超える場合には、補機バッテリ23のOCVは第2領域にあり、OCVである電圧VbがOCV1≦Vb≦OCV2の場合には、補機バッテリ23のOCVは第1領域にあることになる。
そこで、コントローラ70は、補機バッテリ23のOCVである電圧VbがOCV2を超えているか、あるいは、OCV1未満である場合に、補機バッテリ23は第2領域にあり、OCVに基づいてSOCを精度よく推定可能と判断し、図14のステップS309に進む。
コントローラ70は、図14のステップS309に示すように、ステップS307で検出した補機バッテリ23のOCVである電圧Vbとメモリ72に格納した図2に示すSOC−OCVの特性マップを用いて、補機バッテリ23のOCVを推定する。例えば、補機バッテリ23のOCVである電圧Vbが図2に示すOCV3の場合、マップから補機バッテリ23のSOCをSOC3と推定する。そして、それまで電流積算に基づいて推定していたSOCの推定値を精度の高いOCVによるSOCの推定値に置き換える。そして、それ以降は、置き換えたSOCの推定値を基準にして電流積算によるSOCの推定を行っていく。コントローラ70は、SOCの推定値の置き換えが終了したら、図14のステップS311に進む。
一方、コントローラ70は、図14のステップS309でNOと判断した場合、補機バッテリ23のOCVは第1領域にあり、OCVからSOCを推定することが困難と判断し、図14のステップS310に進み、OCVによるSOCの推定を行わず、それまでの電流積算により推定したSOCの値を維持してステップS311に進む。
コントローラ70は、ステップS311において電流センサ26のゼロ点補正を行う。今、充電回路30が停止しており、DC/DCコンバータ21の出力電圧Vdcは、補機バッテリ23の最大電圧であるV100より大きくなっているので、補機バッテリ23の充放電電流はゼロとなっている。そこで、この状態の電流センサ26の出力を補機バッテリ23の電流Ibがゼロの場合の出力に補正する。これにより、電流センサ26の温度上昇等による誤差を補正することができ、電流積算に基づくSOCの推定精度を向上させることができる。
コントローラ70は、ステップS311において電流センサ26のゼロ点補正を行ったら、充電回路30を再始動し、DC/DCコンバータ21の出力目標電圧を通常のVd0の戻し、通常動作に戻る。
以上説明したように、本参考例の電源システム100は、補機バッテリ23のOCVが第2領域にある場合にSOCの推定値を精度の高いOCVによるSOCの推定値に置き換えてそれまで電流積算により推定したSOCの推定誤差を一旦解消するとともに、電流センサ26のゼロ点補正を行ってから、次の電流積算によるSOCの推定を行うので、SOCが変化してもOCVがほとんど変化しない第1領域とSOCの変化に対してOCVが変化する第2領域とを持つ補機バッテリ23のSOCを精度よく推定することができる。
また、本参考例の電源システム100は、DC/DCコンバータ21の出力電圧VdcをVd1に上昇させるとともに、充電回路30を停止することによって補機バッテリ23の電流Ibをゼロとし、補機バッテリ23のOCVの測定と電流センサ26のゼロ点補正を行うようにしているので、補機リレー28をオン/オフすることによる補機リレー28の摩耗を抑制しつつ、SOC推定値置換と電流センサ26のゼロ点補正を行うことができる。さらに、補機リレー28をオン状態としているので、大きなラッシュ電流が発生した場合に、補機バッテリ23から補機負荷22への電力供給が可能となる。
次に、図15、図16を参照しながら、本発明の実施形態について説明する。先に、図5〜図14を参照して説明した参考例と同様の部分には同様の符号を付して説明は省略する。
本実施形態の電源システム200は、図5〜図14を参照して説明した電源システム100の放電回路40の第1スイッチング素子91の寄生ダイオード91bの向きが電源システム100の場合と反対に、カソードが補機バッテリ23側でアノードが補機負荷22側となっている点以外は、電源システム100と同様の構成である。なお、第1スイッチング素子91に代えて、アノードが補機バッテリ23側でカソードが補機負荷22側となっている寄生ダイオードを含むスイッチング素子とカソードが補機バッテリ23側でアノードが補機負荷22側となっている寄生ダイオードを含むスイッチング素子とを直列に接続して構成してもよい。
この構成のため、図15に示す電源システム200は、補機バッテリ23の電圧VbがDC/DCコンバータ21の出力電圧Vdcよりも高くなっても、第1スイッチング素子91がオンとならないと、補機バッテリ23から補機負荷22への放電電流が流れない。
<SOC推定値置換動作と電流センサのゼロ点補正動作>
次に、電源システム200におけるSOC推定値置換動作と電流センサ26のゼロ点補正動作について説明する。
図16のステップS401に示すように、コントローラ70は、DC/DCコンバータ21のスイッチング素子の温度の推定を行う。スイッチング温度の推定は、いろいろな方法を用いることができるが、例えば、DC/DCコンバータ21の通電電流、冷却水、冷却空気の温度、風量等に基づいて推定してもよい。コントローラ70は、DC/DCコンバータ21のスイッチング素子の温度を推定したら、図16のステップS402に進み、推定したスイッチング素子の温度が所定の閾値以下かどうか判断する。ここで、所定の閾値は、例えば、スイッチング素子の耐熱温度からラッシュ電流による素子温度の上昇温度を差し引いた値、つまり、ラッシュ電流が発生した場合にも耐熱温度を超えないと予想される温度としてもよい。
コントローラ70は、図16のステップS402でYESと判断した場合には、図16のステップS403に進み、充電回路30と放電回路40とを停止する指令を出力する。この指令により、充電回路30の第2スイッチング素子92と第3スイッチング素子93とはオフ状態となる。また、放電回路40の第1スイッチング素子91もオフ状態となる。本実施形態の電源システム200では、放電回路40の第1スイッチング素子91の寄生ダイオード91bは補機バッテリ23から補機負荷22に電流が流れないような方向に配置されているので、DC/DCコンバータ21の出力電圧Vdcが補機バッテリ23の電圧Vbよりも低くなった場合でも、補機バッテリ23から補機負荷22に向って電流Ibが流れることはない。したがって、充電回路30と放電回路40とを停止すると、補機バッテリ23はDC/DCコンバータ21、補機負荷22と完全に切り離され、独立した状態となる。
コントローラ70は、ステップS403で充電回路30と放電回路40とを停止したら、先に図14を参照して説明したと同様、図16のステップS305に進んで、補機バッテリ23の温度Tbを検出し、ステップS306で分極時間が解消するまで待機した後、ステップS307で補機バッテリ23のOCVである電圧Vbを取得する。そして、ステップS308で補機バッテリ23の電圧VbがOCV2を超えているか、あるいは、OCV1未満である場合には、補機バッテリ23のOCVは第2領域にあると判断する。
コントローラ70は、図16のステップS308で補機バッテリ23が第2領域にある場合、OCVに基づいてSOCを精度よく推定可能と判断し、ステップS309に進む。そして、コントローラ70は、ステップS309に示すように、ステップS307で検出した補機バッテリ23のOCVである電圧Vbとメモリ72に格納した図2に示すSOC−OCVの特性マップを用いて、補機バッテリ23のOCVを推定し、それまで電流積算に基づいて推定していたSOCの推定値を精度の高いOCVによるSOCの推定値に置き換える。コントローラ70は、SOCの推定値の置き換えが終了したら、図16のステップS311に進み、電流センサ26のゼロ点補正を行う。
また、コントローラ70は、ステップS308でNOと判断した場合、補機バッテリ23のOCVは第1領域にあり、OCVからSOCを推定することが困難と判断し、図16のステップS310に進み、OCVによるSOCの推定を行わず、それまでの電流積算により推定したSOCの値を維持して図16のステップS311に進み、電流センサ26のゼロ点補正を行う。
また、コントローラ70は、図16のステップS402でNOの場合には、ラッシュ電流が発生した場合にDC/DCコンバータ21のスイッチング素子が耐熱温度を超えてしまうと予想し、図16のステップS404に進み、放電回路40を停止せずにSOC推定値置換動作と電流センサ26のゼロ点補正動作を行う、図14に示すステップS301〜S311を実行する。
なお、本実施形態では、DC/DCコンバータ21のスイッチング素子の温度によって充電回路30と放電回路40とを停止することとしているが、これに限らず、例えば、補機負荷22の状況に応じて充電回路30と放電回路40とを停止するようにしてもよい。例えば、デフォッーガーやシガーライター等大きな電力を要求する補機が作動している場合には、放電回路40を切り離すと補機負荷22への供給電力が不足する場合があるので、このような場合には、放電回路40の停止を行わず、図16のステップS404に進み、図14に示すステップS301〜S311を実行してSOC推定値置換動作と電流センサ26のゼロ点補正動作を行う。
コントローラ70は、図16のステップS311において電流センサ26のゼロ点補正を行ったら、充電回路30と放電回路40とを再始動し、DC/DCコンバータ21の出力目標電圧を通常のVd0の戻し、通常動作に戻る。
以上説明した実施形態の電源システム200は、参考例の電源システム100と同様の効果の他、参考例の電源システム100の場合のように、DC/DCコンバータ21の出力目標電圧を通常のVd0より高いVd1に上昇させる必要がないので、補機損失を抑制することができるという効果を奏する。
以上説明した実施形態において、バッテリ1、補機バッテリ23は、いずれも図2に示すように、中央の第1領域と両端の2つの第2領域を持つものとして説明したが、本発明は、複数の第1領域と3つ以上の第2領域を持つ二次電池を含む電源システムにも適用可能である。