JP6633751B2 - ナビゲーション装置及びナビゲーション方法、並びに内視鏡システム - Google Patents
ナビゲーション装置及びナビゲーション方法、並びに内視鏡システム Download PDFInfo
- Publication number
- JP6633751B2 JP6633751B2 JP2018523590A JP2018523590A JP6633751B2 JP 6633751 B2 JP6633751 B2 JP 6633751B2 JP 2018523590 A JP2018523590 A JP 2018523590A JP 2018523590 A JP2018523590 A JP 2018523590A JP 6633751 B2 JP6633751 B2 JP 6633751B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic field
- image signal
- unit
- field detection
- endoscope
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00006—Operational features of endoscopes characterised by electronic signal processing of control signals
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00043—Operational features of endoscopes provided with output arrangements
- A61B1/00045—Display arrangement
- A61B1/0005—Display arrangement combining images e.g. side-by-side, superimposed or tiled
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/009—Flexible endoscopes with bending or curvature detection of the insertion part
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/05—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances characterised by the image sensor, e.g. camera, being in the distal end portion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; Determining position of diagnostic devices within or on the body of the patient
- A61B5/065—Determining position of the probe employing exclusively positioning means located on or in the probe, e.g. using position sensors arranged on the probe
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/285—Invasive instruments, e.g. catheters or biopsy needles, specially adapted for tracking, guiding or visualization by NMR
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/543—Control of the operation of the MR system, e.g. setting of acquisition parameters prior to or during MR data acquisition, dynamic shimming, use of one or more scout images for scan plane prescription
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2051—Electromagnetic tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/30—Devices for illuminating a surgical field, the devices having an interrelation with other surgical devices or with a surgical procedure
- A61B2090/306—Devices for illuminating a surgical field, the devices having an interrelation with other surgical devices or with a surgical procedure using optical fibres
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/30—Devices for illuminating a surgical field, the devices having an interrelation with other surgical devices or with a surgical procedure
- A61B2090/309—Devices for illuminating a surgical field, the devices having an interrelation with other surgical devices or with a surgical procedure using white LEDs
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Public Health (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Pathology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biophysics (AREA)
- Radiology & Medical Imaging (AREA)
- Optics & Photonics (AREA)
- Signal Processing (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Robotics (AREA)
- Human Computer Interaction (AREA)
- High Energy & Nuclear Physics (AREA)
- Endoscopes (AREA)
- Studio Devices (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
- Closed-Circuit Television Systems (AREA)
Description
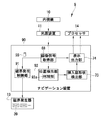
図1は、第1実施形態の内視鏡システム9の全体構成を示す概略図である。図1に示すように、内視鏡システム9は、内視鏡10と、光源装置11と、ナビゲーション装置12と、磁界発生器13と、プロセッサ14と、モニタ15と、を備える。
図2は、第1実施形態の内視鏡システム9の電気的構成を示すブロック図である。図2に示すように、内視鏡10は、ライトガイド33と、照射レンズ45と、照明窓46と、観察窓47と、撮像装置48と、磁界検出回路49と、統括制御回路50と、信号ケーブル32と、LD36と、不図示の流体チューブ及び送気送水ノズルと、を有する。
光源装置11は、照明光源63と、前述のPD37と、光源制御部64と、通信インタフェース65を有している。照明光源63は、例えばLD又は発光ダイオード(Light Emitting Diode:LED)などの半導体光源であり、波長が赤色領域から青色領域にわたる白色光を照明光として出射する。なお、照明光源63の種類は特に限定されるものではない。照明光源63から出射された照明光は、前述のライトガイド33の入射端に入射される。
ナビゲーション装置12は、画像信号取得部68と、信号検出部69と、TG(Timing Generator)70と、磁界発生制御部71と、位置検出部72と、挿入部形状検出部73と、表示出力部74と、を有する。なお、ここでいうナビゲーションとは、被検体内での内視鏡10の挿入部17の形状、及び挿入部17の先端部23の位置等を、術者が把握可能にすることである。また、ナビゲーション装置12の各部は、1又は複数のCPUを含む各種演算回路(不図示)により構成され、不図示のメモリに記憶されている制御用のプログラムを実行することで動作する。
プロセッサ14は、表示入力部82と表示制御部83とを有している。表示入力部82は、表示出力部74から通信インタフェース80A,80Bを介して逐次入力されたフレーム画像信号61及び挿入部形状データ78を、表示制御部83へ逐次出力する。
次に、図9を用いて第1実施形態の内視鏡システム9の作用について説明する。なお、図9は、第1実施形態の内視鏡システム9における内視鏡検査、特に観察画像41及び挿入部形状画像42の表示処理(ナビゲーション方法)の流れを示すフローチャートである。
以上の第1実施形態の内視鏡システム9では、内視鏡10からナビゲーション装置12に対して、フレーム開始信号VD及び全磁界検出データ55が付加されたフレーム画像信号61を出力するため、全磁界検出データ55をナビゲーション装置12に対して出力するための出力系統を内視鏡10に別途設ける必要がなくなる。その結果、内視鏡10を大型化することなく低コストに全磁界検出データ55をナビゲーション装置12に出力することができる。すなわち、内視鏡10を小型化且つ低コスト化することができる。
上記第1実施形態では、フレーム開始信号VD間で各発生コイル39の切り替えが一巡するように、磁界発生制御部71による発生コイル39の切替制御を行っているが(図5参照)、フレーム開始信号VDに同期して各発生コイル39の切り替えを行ってもよい。
次に、第3実施形態の内視鏡システム9について説明を行う。上記第1実施形態では、フレーム開始信号VD(基準信号)を基準として、磁界発生器13での発生コイル39の切替制御と、内視鏡10での全磁界検出データ55の検出及び付加とを同期して行うことより、フレーム開始信号VDに基づいた対応関係75の判別を可能にしている。これに対して、第3実施形態では、第1実施形態とは異なる方法で各発生コイル39と各磁界検出データ55との対応関係75を判別可能にしている。
上記各実施形態では、磁界検出データ55を、撮像素子53のブランキングタイムBT(垂直ブランキングタイム)に対応するフレーム画像信号61間の信号無効領域NDに付加する場合について説明したが、例えば各フレーム画像信号61のヘッダ等に磁界検出データ55を付加してもよく、フレーム画像信号61に磁界検出データ55を付加する方法は特に限定はされない。
10 内視鏡
11 光源装置
12 ナビゲーション装置
13 磁界発生器
14 プロセッサ
15 モニタ
17 挿入部
18 操作部
19 ユニバーサルコード
21 軟性部
22 湾曲部
23 先端部
25 検出コイル
27 湾曲操作ノブ
28 送気送水ボタン
29 吸引ボタン
31 処置具導入口
32 信号ケーブル
33 ライトガイド
34 コネクタ
36 LD
37 PD
39 発生コイル
41 観察画像
42 挿入部形状画像
45 照射レンズ
46 照明窓
47 観察窓
48 撮像装置
49 磁界検出回路
49a プリアンプ
49b A/D変換回路
50 統括制御回路
52 集光レンズ
53 撮像素子
53a 発振部
55 磁界検出データ
57 信号処理部
58 磁界検出制御部
59 画像信号出力部
61 フレーム画像信号
63 照明光源
64 光源制御部
65 通信インタフェース
68 画像信号取得部
69 信号検出部
70 TG
71 磁界発生制御部
72 位置検出部
72a 判別部
73 挿入部形状検出部
74 表示出力部
75 対応関係
75A 対応関係
76 コイル位置データ
78 挿入部形状データ
80A 通信インタフェース
80B 通信インタフェース
82 表示入力部
83 表示制御部
90 ナビゲーション装置
91 磁界発生制御部
92 位置検出部
92a 判別部
99 発生パターン
BT ブランキングタイム
ND 信号無効領域
PT 先端位置
S1A〜S8A,S1B〜S12B 内視鏡システムの作用
S1C〜S6C,S1D〜S8D 内視鏡システムの作用
VD フレーム開始信号
XYZ 直交座標系
Claims (13)
- 被検体内に挿入される挿入部と、前記挿入部の先端側に設けられた撮像素子と、前記挿入部内に設けられ且つ磁界を検出する複数の磁界検出部と、を有する内視鏡に用いられるナビゲーション装置において、
互いに異なる位置で磁界を発生する複数の磁界発生部から異なるタイミングで磁界を発生させる磁界発生制御部と、
前記撮像素子から出力された画像信号に、磁界を発生している前記磁界発生部を特定する特定情報と、前記磁界検出部ごとの磁界検出結果とを付加した付加画像信号を、前記内視鏡から取得する画像信号取得部と、
前記画像信号取得部が取得した前記付加画像信号に付加されている前記特定情報及び前記磁界検出結果に基づき、前記磁界検出部ごとの位置を検出する位置検出部と、
を備え、
前記画像信号は、動画像を構成する複数のフレーム画像信号であり、前記付加画像信号は、前記フレーム画像信号に前記特定情報及び前記磁界検出結果を付加した付加フレーム画像信号であり、
前記特定情報は、前記付加フレーム画像信号の開始を示すフレーム開始信号であり、
前記磁界発生制御部は、前記画像信号取得部が取得した前記付加フレーム画像信号に付加されている前記フレーム開始信号に基づき、磁界を発生する前記磁界発生部の切り替えを行い、
前記位置検出部は、
前記付加フレーム画像信号に付加されている前記フレーム開始信号に基づき、当該付加フレーム画像信号に付加されている前記磁界検出結果と前記磁界発生部との対応関係を判別する判別処理と、
前記判別処理で判別した前記対応関係に基づき、前記磁界検出結果から前記磁界検出部ごとの位置を検出する位置検出処理と、を行うナビゲーション装置。 - 被検体内に挿入される挿入部と、前記挿入部の先端側に設けられた撮像素子と、前記挿入部内に設けられ且つ磁界を検出する複数の磁界検出部と、を有する内視鏡に用いられるナビゲーション装置において、
互いに異なる位置で磁界を発生する複数の磁界発生部から異なるタイミングで磁界を発生させる磁界発生制御部と、
前記撮像素子から出力された画像信号に、磁界を発生している前記磁界発生部を特定する特定情報と、前記磁界検出部ごとの磁界検出結果とを付加した付加画像信号を、前記内視鏡から取得する画像信号取得部と、
前記画像信号取得部が取得した前記付加画像信号に付加されている前記特定情報及び前記磁界検出結果に基づき、前記磁界検出部ごとの位置を検出する位置検出部と、
を備え、
前記磁界発生制御部は、前記磁界発生部ごとに異なる発生パターンで前記磁界を発生させ、
前記磁界検出結果には、前記特定情報が前記発生パターンとして含まれており、
前記位置検出部は、
前記付加画像信号に付加されている前記磁界検出結果から検出した前記発生パターンに基づき、当該磁界検出結果に対応する前記磁界発生部を判別する判別処理と、
前記判別処理の判別結果に基づき、前記磁界検出結果から前記磁界検出部ごとの位置を検出する位置検出処理と、を行うナビゲーション装置。 - 前記画像信号は、動画像を構成する複数のフレーム画像信号であり、前記付加画像信号は、前記フレーム画像信号に前記特定情報及び前記磁界検出結果を付加した付加フレーム画像信号であり、
前記磁界検出結果は、前記撮像素子のブランキングタイムに対応する前記付加フレーム画像信号の間の信号無効領域に付加されている請求項1又は2に記載のナビゲーション装置。 - 前記画像信号取得部は、前記内視鏡との間で非接触型通信を行うことにより、当該内視鏡から前記付加画像信号を取得する請求項1から3のいずれか1項に記載のナビゲーション装置。
- 前記位置検出部による位置検出結果に基づき、前記被検体内での前記挿入部の形状を検出する挿入部形状検出部を備える請求項1から4のいずれか1項に記載のナビゲーション装置。
- 被検体内に挿入される挿入部と、前記挿入部の先端側に設けられた撮像素子と、前記挿入部内に設けられ且つ磁界を検出する複数の磁界検出部と、を有する内視鏡と、
磁界を発生する複数の磁界発生部と、
請求項1から5のいずれか1項に記載のナビゲーション装置と、
を備える内視鏡システム。 - 前記内視鏡には、前記撮像素子から出力された画像信号に、磁界を発生している前記磁界発生部を特定する特定情報と、前記磁界検出部ごとの磁界検出結果とを付加して、前記特定情報及び前記磁界検出結果を付加した付加画像信号を、前記ナビゲーション装置へ出力する画像信号出力部が設けられている請求項6に記載の内視鏡システム。
- 前記磁界発生部は、前記内視鏡とは異なる位置に設けられている請求項6又は7に記載の内視鏡システム。
- 被検体内に挿入される挿入部と、前記挿入部の先端側に設けられた撮像素子と、前記挿入部内に設けられ且つ磁界を検出する複数の磁界検出部と、を有する内視鏡のナビゲーション方法において、
互いに異なる位置で磁界を発生する複数の磁界発生部から異なるタイミングで磁界を発生させる磁界発生制御ステップと、
前記撮像素子から出力された画像信号に、磁界を発生している前記磁界発生部を特定する特定情報と、前記磁界検出部ごとの磁界検出結果とを付加した付加画像信号を、前記内視鏡から取得する画像信号取得ステップと、
前記画像信号取得ステップで取得した前記付加画像信号に付加されている前記特定情報及び前記磁界検出結果に基づき、前記磁界検出部ごとの位置を検出する位置検出ステップと、
を有し、
前記画像信号は、動画像を構成する複数のフレーム画像信号であり、前記付加画像信号は、前記フレーム画像信号に前記特定情報及び前記磁界検出結果を付加した付加フレーム画像信号であり、
前記特定情報は、前記付加フレーム画像信号の開始を示すフレーム開始信号であり、
前記磁界発生制御ステップは、前記画像信号取得ステップで取得した前記付加フレーム画像信号に付加されている前記フレーム開始信号に基づき、磁界を発生する前記磁界発生部の切り替えを行うことを含み、
前記位置検出ステップは、
前記付加フレーム画像信号に付加されている前記フレーム開始信号に基づき、当該付加フレーム画像信号に付加されている前記磁界検出結果と前記磁界発生部との対応関係を判別する判別処理と、
前記判別処理で判別した前記対応関係に基づき、前記磁界検出結果から前記磁界検出部ごとの位置を検出する位置検出処理と、を行うことを含む、
ナビゲーション方法。 - 被検体内に挿入される挿入部と、前記挿入部の先端側に設けられた撮像素子と、前記挿入部内に設けられ且つ磁界を検出する複数の磁界検出部と、を有する内視鏡のナビゲーション方法において、
互いに異なる位置で磁界を発生する複数の磁界発生部から異なるタイミングで磁界を発生させる磁界発生制御ステップと、
前記撮像素子から出力された画像信号に、磁界を発生している前記磁界発生部を特定する特定情報と、前記磁界検出部ごとの磁界検出結果とを付加した付加画像信号を、前記内視鏡から取得する画像信号取得ステップと、
前記画像信号取得ステップで取得した前記付加画像信号に付加されている前記特定情報及び前記磁界検出結果に基づき、前記磁界検出部ごとの位置を検出する位置検出ステップと、
を有し、
前記磁界発生制御ステップは、前記磁界発生部ごとに異なる発生パターンで前記磁界を発生させ、
前記磁界検出結果には、前記特定情報が前記発生パターンとして含まれており、
前記位置検出ステップは、
前記付加画像信号に付加されている前記磁界検出結果から検出した前記発生パターンに基づき、当該磁界検出結果に対応する前記磁界発生部を判別する判別処理と、
前記判別処理の判別結果に基づき、前記磁界検出結果から前記磁界検出部ごとの位置を検出する位置検出処理と、を行うことを含む、
ナビゲーション方法。 - 前記画像信号は、動画像を構成する複数のフレーム画像信号であり、前記付加画像信号は、前記フレーム画像信号に前記特定情報及び前記磁界検出結果を付加した付加フレーム画像信号であり、
前記磁界検出結果は、前記撮像素子のブランキングタイムに対応する前記付加フレーム画像信号の間の信号無効領域に付加されている請求項9又は10に記載のナビゲーション方法。 - 前記画像信号取得ステップは、前記内視鏡との間で非接触型通信を行うことにより、当該内視鏡から前記付加画像信号を取得することを含む請求項9から11のいずれか1項に記載のナビゲーション方法。
- 前記位置検出ステップによる位置検出結果に基づき、前記被検体内での前記挿入部の形状を検出する挿入部形状検出ステップを含む請求項9から12のいずれか1項に記載のナビゲーション方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016119782 | 2016-06-16 | ||
| JP2016119782 | 2016-06-16 | ||
| PCT/JP2017/018211 WO2017217162A1 (ja) | 2016-06-16 | 2017-05-15 | ナビゲーション装置及びナビゲーション方法、並びに内視鏡システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2017217162A1 JPWO2017217162A1 (ja) | 2019-05-16 |
| JP6633751B2 true JP6633751B2 (ja) | 2020-01-22 |
Family
ID=60664360
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018523590A Active JP6633751B2 (ja) | 2016-06-16 | 2017-05-15 | ナビゲーション装置及びナビゲーション方法、並びに内視鏡システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11419480B2 (ja) |
| EP (1) | EP3473158B1 (ja) |
| JP (1) | JP6633751B2 (ja) |
| CN (1) | CN109195499B (ja) |
| WO (1) | WO2017217162A1 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110325098A (zh) | 2016-11-28 | 2019-10-11 | 适内有限责任公司 | 具有可分离一次性轴的内窥镜 |
| WO2020039776A1 (ja) * | 2018-08-23 | 2020-02-27 | 富士フイルム株式会社 | 内視鏡システム及び位置導出方法 |
| JP6995793B2 (ja) * | 2019-03-06 | 2022-01-17 | 富士フイルム株式会社 | 内視鏡システム、その作動方法、内視鏡システムに用いられる受信側装置および同期信号中継装置 |
| EP3942992A4 (en) * | 2019-06-17 | 2022-12-21 | Shenzhen Sibernetics Co., Ltd. | MAGNETIC CAPSULE ENDOSCOPE CONTROL DEVICE AND METHOD FOR CONTROLLING THE MOVEMENT OF A CAPSULE ENDOSCOPE IN A TISSUE CAVITY |
| JP2021016631A (ja) * | 2019-07-22 | 2021-02-15 | 富士フイルム株式会社 | 内視鏡形状表示制御装置、内視鏡形状表示制御装置の作動方法、および内視鏡形状表示制御装置の作動プログラム |
| JP7098583B2 (ja) * | 2019-08-20 | 2022-07-11 | 富士フイルム株式会社 | 内視鏡システム及びその作動方法 |
| CN114174889B (zh) * | 2019-08-20 | 2024-04-09 | 富士胶片株式会社 | 内窥镜系统及其工作方法 |
| WO2021044661A1 (ja) * | 2019-09-02 | 2021-03-11 | 富士フイルム株式会社 | 内視鏡システム及びその作動方法 |
| JP7084364B2 (ja) * | 2019-09-02 | 2022-06-14 | 富士フイルム株式会社 | 内視鏡システム及びその作動方法 |
| USD1018844S1 (en) | 2020-01-09 | 2024-03-19 | Adaptivendo Llc | Endoscope handle |
| USD1051380S1 (en) | 2020-11-17 | 2024-11-12 | Adaptivendo Llc | Endoscope handle |
| WO2022153946A1 (ja) * | 2021-01-15 | 2022-07-21 | 富士フイルム株式会社 | 処理装置、処理方法、及び処理プログラム |
| USD1031035S1 (en) | 2021-04-29 | 2024-06-11 | Adaptivendo Llc | Endoscope handle |
| USD1070082S1 (en) | 2021-04-29 | 2025-04-08 | Adaptivendo Llc | Endoscope handle |
| USD1066659S1 (en) | 2021-09-24 | 2025-03-11 | Adaptivendo Llc | Endoscope handle |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4054104B2 (ja) | 1998-04-10 | 2008-02-27 | オリンパス株式会社 | 内視鏡画像処理装置 |
| JP3504517B2 (ja) | 1998-11-27 | 2004-03-08 | オリンパス株式会社 | 内視鏡挿入形状検出装置 |
| JP4538147B2 (ja) * | 2000-11-30 | 2010-09-08 | Hoya株式会社 | ワイヤレス電子内視鏡装置とスコープと画像信号処理ユニット |
| US8211010B2 (en) * | 2002-10-29 | 2012-07-03 | Olympus Corporation | Endoscope information processor and processing method |
| JP4025621B2 (ja) | 2002-10-29 | 2007-12-26 | オリンパス株式会社 | 画像処理装置及び内視鏡画像処理装置 |
| JP2006212187A (ja) | 2005-02-03 | 2006-08-17 | Pentax Corp | 電子内視鏡システム |
| JP4914574B2 (ja) * | 2005-04-18 | 2012-04-11 | オリンパスメディカルシステムズ株式会社 | 内視鏡形状検出装置 |
| JP4708962B2 (ja) | 2005-11-09 | 2011-06-22 | Hoya株式会社 | 内視鏡挿入部形状把握システム |
| US20070106114A1 (en) * | 2005-11-09 | 2007-05-10 | Pentax Corporation | Endoscope-shape monitoring system |
| JP2007130174A (ja) * | 2005-11-09 | 2007-05-31 | Pentax Corp | 内視鏡挿入部形状把握システム |
| JP2007130175A (ja) | 2005-11-09 | 2007-05-31 | Pentax Corp | 内視鏡挿入部形状把握システム |
| US7945310B2 (en) * | 2006-09-18 | 2011-05-17 | Stryker Corporation | Surgical instrument path computation and display for endoluminal surgery |
| JP4855902B2 (ja) | 2006-11-13 | 2012-01-18 | オリンパスメディカルシステムズ株式会社 | 生体観測システム |
| JP5243750B2 (ja) * | 2007-08-09 | 2013-07-24 | オリンパスメディカルシステムズ株式会社 | 医療装置誘導システム、作動方法および医療装置誘導システムで用いるルックアップテーブルの作成方法 |
| JP5295555B2 (ja) * | 2007-12-10 | 2013-09-18 | オリンパスメディカルシステムズ株式会社 | 内視鏡システム |
| JP2011024606A (ja) * | 2009-07-21 | 2011-02-10 | Machida Endscope Co Ltd | 内視鏡及び内視鏡システム |
| WO2014004992A1 (en) * | 2012-06-28 | 2014-01-03 | Golenberg Lavie | Integrated endoscope |
| WO2014208630A1 (ja) * | 2013-06-27 | 2014-12-31 | オリンパスメディカルシステムズ株式会社 | カプセル型医療システム、位置検出装置、及びカプセル型医療装置 |
-
2017
- 2017-05-15 CN CN201780032794.1A patent/CN109195499B/zh active Active
- 2017-05-15 EP EP17813065.4A patent/EP3473158B1/en active Active
- 2017-05-15 WO PCT/JP2017/018211 patent/WO2017217162A1/ja not_active Ceased
- 2017-05-15 JP JP2018523590A patent/JP6633751B2/ja active Active
-
2018
- 2018-11-19 US US16/194,402 patent/US11419480B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2017217162A1 (ja) | 2017-12-21 |
| US11419480B2 (en) | 2022-08-23 |
| CN109195499A (zh) | 2019-01-11 |
| EP3473158A1 (en) | 2019-04-24 |
| CN109195499B (zh) | 2021-01-26 |
| JPWO2017217162A1 (ja) | 2019-05-16 |
| EP3473158B1 (en) | 2020-08-12 |
| EP3473158A4 (en) | 2019-06-26 |
| US20190082930A1 (en) | 2019-03-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6633751B2 (ja) | ナビゲーション装置及びナビゲーション方法、並びに内視鏡システム | |
| WO2020165978A1 (ja) | 画像記録装置、画像記録方法および画像記録プログラム | |
| JP4745833B2 (ja) | 電子内視鏡システム | |
| US9445709B2 (en) | Imaging unit and imaging system | |
| US20240164706A1 (en) | In-vivo observation system, observation system, in-vivo observation method, and in-vivo observation device | |
| JP5269348B2 (ja) | 位置検出システム及び位置検出システムの作動方法 | |
| JP6995793B2 (ja) | 内視鏡システム、その作動方法、内視鏡システムに用いられる受信側装置および同期信号中継装置 | |
| JP2006223850A (ja) | 電子内視鏡システム | |
| JP7234386B2 (ja) | 内視鏡システム及びその作動方法 | |
| CN114174889B (zh) | 内窥镜系统及其工作方法 | |
| JP7098583B2 (ja) | 内視鏡システム及びその作動方法 | |
| JP7084364B2 (ja) | 内視鏡システム及びその作動方法 | |
| JP7405136B2 (ja) | ケーブル、報知方法 | |
| CN112438694A (zh) | 线圈组件 | |
| CN114206194B (zh) | 内窥镜形状显示控制装置、内窥镜形状显示控制装置的工作方法、及计算机可读介质 | |
| CN114126474B (zh) | 内窥镜形状显示控制装置、内窥镜形状显示控制装置的操作方法、及计算机可读介质 | |
| JP2021016631A (ja) | 内視鏡形状表示制御装置、内視鏡形状表示制御装置の作動方法、および内視鏡形状表示制御装置の作動プログラム | |
| JP2006212187A (ja) | 電子内視鏡システム | |
| CN120641017A (zh) | 医疗用装置、内窥镜系统、控制方法以及控制程序 | |
| JP2006288800A (ja) | 電子内視鏡および電子内視鏡システム | |
| JP2006136663A (ja) | 内視鏡形状検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181120 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181120 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191210 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191212 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6633751 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |