JP6658077B2 - つまずきリスクの評価方法 - Google Patents
つまずきリスクの評価方法 Download PDFInfo
- Publication number
- JP6658077B2 JP6658077B2 JP2016034126A JP2016034126A JP6658077B2 JP 6658077 B2 JP6658077 B2 JP 6658077B2 JP 2016034126 A JP2016034126 A JP 2016034126A JP 2016034126 A JP2016034126 A JP 2016034126A JP 6658077 B2 JP6658077 B2 JP 6658077B2
- Authority
- JP
- Japan
- Prior art keywords
- acceleration
- toe clearance
- minimum toe
- minimum
- clearance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Landscapes
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
Description
加速度パラメータとして、最小つま先クリアランスを推定する足について、1歩行周期における立脚期中期の加速度、中期両足支持期の加速度、遊脚期前半の加速度、及び遊脚期後半の加速度から選ばれる加速度を使用するつまずきリスクの評価方法を提供する。
被験者に携帯される加速度センサ、及び加速度センサで計測された加速度を用いて最小つま先クリアランスを算出し出力する演算装置を有し、
加速度センサは、歩行中の被験者の前後方向、左右方向及び鉛直方向の加速度を測定可能であり、
演算装置は、上述の回帰式を記憶する機能、
最小つま先クリアランスを推定する足について、踵着地から次の踵着地までの1歩行周期の加速度を時間分割して所定の時間間隔の加速度を取得する機能、
該所定時間間隔の加速度から、前記回帰式の加速度パラメータである立脚期中期の加速度、中期両足支持期の加速度、遊脚期前半の加速度、及び遊脚期後半の加速度から選ばれる加速度を抽出する機能、
抽出した加速度を前記回帰式で使用して最小つま先クリアランスを算出する機能、
を有する最小つま先クリアランスの推定装置を提供する。
本発明のつまずきリスクの評価方法では、概略、最小つま先クリアランスを目的変数とし、歩行における腰部の前後方向、左右方向及び鉛直方向の加速度から導出される加速度パラメータを説明変数に含む回帰式を使用して、任意の被験者の最小つま先クリアランスを算出し、つまずきリスクを評価する。
本発明で使用する回帰式としては最小つま先クリアランスを目的変数とし、加速度パラメータを説明変数に使用して重回帰分析することにより得たものを使用することが好ましい。
(a1)踵着地から次の踵着地までの1歩行周期における立脚期中期の左右方向の加速度、好ましくは、図1に示すように1歩行周期を100%としたときの時間率(以下、単に時間率という)が20〜30%の左右方向の加速度。
(a2)1歩行周期における中期両足支持期の前後方向の加速度、好ましくは時間率50〜60%の前後方向の加速度。
(a3)1歩行周期における遊脚期前半の前後方向の加速度、好ましくは時間率70〜75%の前後方向の加速度。
(a4)1歩行周期における遊脚期前半の左右方向の加速度、好ましくは時間率75〜80%の左右方向の加速度。
(a5)1歩行周期における遊脚期後半の前後方向の加速度、好ましくは時間率90〜95%の前後方向の加速度。
(a6)1歩行周期における遊脚期後半の前後方向の加速度、好ましくは時間率92〜100%の左右方向の加速度。
任意の被験者の最小つま先クリアランスは、その被験者の歩行における腰部の前後方向、左右方向及び鉛直方向の加速度を測定し、回帰式の説明変数である加速度パラメータを得、その加速度パラメータを上述の回帰式で用いることにより算出する。こうして算出した最小つま先クリアランスを被験者の最小つま先クリアランスの推定値とする。
したがって、本発明によれば、最小つま先クリアランスの推定値に基づいてつまずきリスクを評価することができる。
最小つま先クリアランスに基づいてつまずきリスクを評価する方法の具体的な態様としては、例えば、最小つま先クリアランスとつまずき易さとの関係を予め調べ、つまずき易さを段階的に評価する場合の最小つま先クリアランスの閾値を設定し、その閾値に対して任意の被験者の最小つま先クリアランスの推定値を比較することによりその被験者のつまずき易さを段階的に評価することができる。
任意の被験者について、腰部の加速度の測定から最小つま先クリアランスを推定する最小つま先クリアランスの推定装置としては、日常の歩行における最小つま先クリアランスを推定できるように、日常生活において携帯可能な装置であることが好ましい。
左右の足のうち最小つま先クリアランスを推定する足について、踵着地から次の踵着地までの1歩行周期の加速度を時間分割して所定の時間間隔の加速度を取得する機能、
該所定時間間隔の加速度から、前記回帰式の加速度パラメータである所定の時間率の範囲
の加速度を抽出する機能、
抽出した加速度と算出した主成分得点を前記回帰式で使用して最小つま先クリアランスを算出し、最小つま先クリアランスの推定値として出力する機能を有する。
実施例1
(1)回帰式の取得
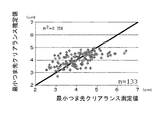
歩行時に痛みがない自力で歩行可能な20歳から73歳の男女133名(男性74名、女性59名)を被験者とした。被験者には、前日の過度な運動と飲酒を控えるように指示した。
1)計測された全被験者のマーカ座標の生データに4次のButterworthローパスフィルタをかけノイズを除去した。カットオフ周波数は10Hzとした。
2)腰(仙骨部)の3軸の加速度を抽出した。加速度は、マーカ座標を2回微分することで取得した。
=4.464+(性別)×0.367+(X24%)×(-0.018)+(Y53%)×(-0.018)+(Y71%)×(-0.017)+(X77%)×(-0.042)+(Y94%)×(0.007)+(X95%)×(-0.019)+(第21主成分得点)×(0.056)+(第24主成分得点)×(-0.054)
回帰式の取得に関わらなかった自力で歩行が可能な28歳の男性を被験者とし、この被験者の日常生活での0時〜3時、3時〜6時、6時〜9時、9時〜12時、12時〜15時、15時〜18時、18時〜21時、21時〜24時の時間帯ごとに加速度の計測が可能であったストライド数の歩行について、X(左右方向)、Y(前後方向)、Z(鉛直方向)の加速度を測定した。なお、0時〜3時は、0時以降3時前までを意味する。他の時間帯についても同様である。
(2)の被験者の最小つま先クリアランスを(1)と同様にして12時から15時に測定した。その結果、(2)の推定値は3.70cmであったのに対し、日常生活における最小つま先クリアランスの実測値は3.73cmであり、推定精度の高いことが確認できた。
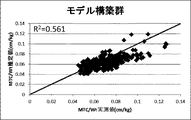
(1)の重回帰分析において、説明変数として、主成分得点を使用せず、各被験者の性別及び相関係数が0.25以上の加速度成分だけを使用する以外は実施例1と同様にして次の回帰式を求めた。式中、Xt%は左右方向の時間率t%の加速度を表し、Yt%は前後方向の時間率t%の加速度を表し、Zt%は鉛直方向の時間率t%の加速度を表す。
=4.617+(性別)×0.331+(Z58%)×(0.009)+(Y64%)×(-0.067)+(Y65%)×(0.173)+(Y66%)×(-0.104)+(X84%)×(-0.021)+(X85%)×(0.04)+(Y92%)×(-0.092)+(Y93%)×(0.205)+(Y94%)×(-0.1)+(X95%)×(-0.29)+(X96%)×(0.521)+(X97%)×(-0.272)
(1)回帰式の取得
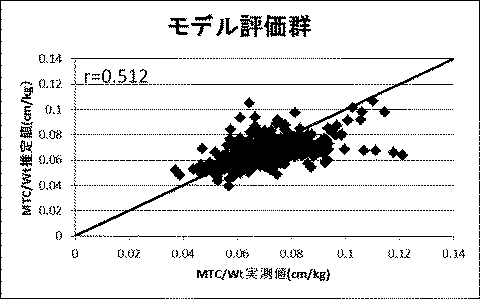
歩行時に痛みがない自力で歩行可能な20歳から77歳の健常成人120名分(男性63名、女性57名)を被験者とした。被験者らは歩行動作に影響を与えるような傷害歴や疾病歴などを負っていない健常成人であり、計測時には痛みなどを訴えることなく歩行補助具や装具などを用いずに2足で歩行できる者であった。
=0.055+(24%:身長で正規化)×(-0.009)+(51%:正規化せず)×(-0.007)+(99%:正規化せず)×(0.002)+ (77%:体重で正規化)×(0.421)+(94%:正規化せず)×(0.005)
Claims (17)
- 最小つま先クリアランスを目的変数とし、歩行における腰部の前後方向、左右方向及び鉛直方向の加速度から導出される加速度パラメータを説明変数に含む回帰式を使用して、被験者の右足又は左足について最小つま先クリアランスを算出し、つまずきリスクを評価するつまずきリスクの評価方法であって、
加速度パラメータとして、最小つま先クリアランスを推定する足について、1歩行周期における立脚期中期の加速度、中期両足支持期の加速度、遊脚期前半の加速度、及び遊脚期後半の加速度から選ばれる加速度を使用するつまずきリスクの評価方法。 - 加速度パラメータとして、1歩行周期における立脚期中期の左右方向の加速度、中期両足支持期の前後方向の加速度、遊脚期前半の前後方向の加速度及び左右方向の加速度、並びに遊脚期後半の前後方向の加速度及び左右方向の加速度を使用する請求項1記載のつまずきリスクの評価方法。
- 加速度パラメータとして、さらに、最小つま先クリアランスを推定する足についての踵着地から次の踵着地までの1歩行周期における所定時間間隔の前後方向、左右方向及び鉛直方向の加速度の主成分分析により算出される主成分得点であって、測定された最小つま先クリアランスと相関の高い主成分得点を使用する請求項1又は2記載のつまずきリスクの評価方法。
- 前記主成分得点が、最小つま先クリアランスとの相関係数が0.25以上である請求項3記載のつまずきリスクの評価方法。
- 加速度パラメータとして、身長又は体重で標準化した加速度を使用する請求項1〜4のいずれかに記載のつまずきリスクの評価方法。
- 最小つま先クリアランスが体重で標準化されている請求項1〜5のいずれかに記載のつまずきリスクの評価方法。
- 最小つま先クリアランスを1歩行周期ごとに算出する請求項1〜6のいずれかに記載のつまずきリスクの評価方法。
- 所定時間帯の歩行の最小つま先クリアランスの平均を算出する請求項1〜7のいずれかに記載のつまずきリスクの評価方法。
- 所定時間帯の歩行の最小つま先クリアランスのばらつきを算出する請求項1〜8のいずれかに記載のつまずきリスクの評価方法。
- 回帰式が、複数の被験者について、歩行における腰部の前後方向、左右方向及び鉛直方向の加速度と、最小つま先クリアランスを測定し、最小つま先クリアランスを目的変数とし、測定した加速度から導出した加速度パラメータを説明変数に含む重回帰分析により導出されたものである請求項1〜9のいずれかに記載のつまずきリスクの評価方法。
- 歩行中の被験者の腰部の加速度から最小つま先クリアランスを推定する最小つま先クリアランスの推定装置であって、
被験者に携帯される加速度センサ、及び加速度センサで計測された加速度を用いて最小つま先クリアランスを算出し出力する演算装置を有し、
加速度センサは、歩行中の被験者の前後方向、左右方向及び鉛直方向の加速度を測定可能であり、
演算装置は、請求項1記載の回帰式を記憶する機能、
最小つま先クリアランスを推定する足について、踵着地から次の踵着地までの1歩行周期の加速度を時間分割して所定の時間間隔の加速度を取得する機能、
該所定時間間隔の加速度から、前記回帰式の加速度パラメータである立脚期中期の加速度、中期両足支持期の加速度、遊脚期前半の加速度、及び遊脚期後半の加速度から選ばれる加速度を抽出する機能、
抽出した加速度を前記回帰式で使用して最小つま先クリアランスを算出する機能、
を有する最小つま先クリアランスの推定装置。 - 演算装置が記憶している回帰式が、加速度パラメータとして、1歩行周期における立脚期中期の左右方向の加速度、中期両足支持期の前後方向の加速度、遊脚期前半の前後方向の加速度及び左右方向の加速度、及び遊脚期後半の前後方向の加速度及び左右方向の加速度を含み、
演算装置が、1歩行周期における所定時間間隔の加速度から、加速度パラメータである立脚期中期の左右方向の加速度、中期両足支持期の前後方向の加速度、遊脚期前半の前後方向の加速度及び左右方向の加速度、並びに遊脚期後半の前後方向の加速度及び左右方向の加速度を抽出する機能、及び
抽出した加速度を前記回帰式で使用して最小つま先クリアランスを算出する機能、
を有する請求項11記載の最小つま先クリアランスの推定装置。 - 演算装置が記憶している回帰式が、加速度パラメータとして、1歩行周期における所定時間間隔の前後方向、左右方向及び鉛直方向の加速度の主成分分析により算出される主成分得点であって、最小つま先クリアランスと相関の高い主成分得点を含み、
演算装置が、被験者の1歩行周期における所定時間間隔の加速度から、加速度パラメータである主成分得点を算出する機能、及び
抽出した加速度と算出した主成分得点を回帰式で使用して最小つま先クリアランスを算出する機能、
を有する請求項11又は12記載の最小つま先クリアランスの推定装置。 - 演算装置が、1歩行周期ごとに最小つま先クリアランスを算出する請求項11〜13のいずれかに記載の最小つま先クリアランスの推定装置。
- 演算装置が、所定の時間帯における歩行の最小つま先クリアランスの平均を算出する機能を有する請求項11〜14のいずれかに記載の最小つま先クリアランスの推定装置。
- 演算装置が、所定の時間帯における歩行の最小つま先クリアランスのばらつきを算出する機能を有する請求項11〜15のいずれかに記載の最小つま先クリアランスの推定装置。
- 演算装置が、回帰式を用いて算出した最小つま先クリアランスに基づいてつまずきリスクを評価する機能、又は所定時間帯における最小つま先クリアランスの平均を算出し、該平均に基づいてつまずきリスクを評価する機能、又は所定時間帯における最小つま先クリアランスのばらつきを算出し、該ばらつきに基づいてつまずきリスクを評価する機能を有する請求項11〜13のいずれかに記載の最小つま先クリアランスの推定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016034126A JP6658077B2 (ja) | 2016-02-25 | 2016-02-25 | つまずきリスクの評価方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016034126A JP6658077B2 (ja) | 2016-02-25 | 2016-02-25 | つまずきリスクの評価方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017148287A JP2017148287A (ja) | 2017-08-31 |
| JP6658077B2 true JP6658077B2 (ja) | 2020-03-04 |
Family
ID=59740007
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016034126A Active JP6658077B2 (ja) | 2016-02-25 | 2016-02-25 | つまずきリスクの評価方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6658077B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3530253B1 (en) | 2018-02-27 | 2021-06-02 | Jtekt Corporation | Walking assist device |
| US20230414130A1 (en) * | 2020-12-01 | 2023-12-28 | Nec Corporation | Walking index calculation device, walking index calculation system, walking index calculation method, and program recording medium |
| WO2023047558A1 (ja) * | 2021-09-27 | 2023-03-30 | 日本電気株式会社 | 推定装置、情報提示システム、推定方法、および記録媒体 |
| JP2023062231A (ja) * | 2021-10-21 | 2023-05-08 | 株式会社ジェイテクト | 分析システム、学習モデル生成装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4962765B2 (ja) * | 2005-09-26 | 2012-06-27 | アイシン精機株式会社 | 歩行解析装置及び歩行解析方法 |
| US8647287B2 (en) * | 2008-12-07 | 2014-02-11 | Andrew Greenberg | Wireless synchronized movement monitoring apparatus and system |
| JP5115673B2 (ja) * | 2010-03-16 | 2013-01-09 | 株式会社村田製作所 | 歩行用靴 |
| WO2012007855A1 (en) * | 2010-07-14 | 2012-01-19 | Ecole Polytechnique Federale De Lausanne (Epfl) | System and method for 3d gait assessment |
| US9524424B2 (en) * | 2011-09-01 | 2016-12-20 | Care Innovations, Llc | Calculation of minimum ground clearance using body worn sensors |
| ES2928091T3 (es) * | 2011-10-09 | 2022-11-15 | Medical Res Infrastructure & Health Services Fund Tel Aviv Medical Ct | Realidad virtual para el diagnóstico de trastornos de movimiento |
| JP5915990B2 (ja) * | 2012-01-04 | 2016-05-11 | 国立研究開発法人産業技術総合研究所 | つまずきリスク評価装置、つまずきリスク評価システム |
-
2016
- 2016-02-25 JP JP2016034126A patent/JP6658077B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017148287A (ja) | 2017-08-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6183906B2 (ja) | 歩容推定装置とそのプログラム、転倒危険度算出装置とそのプログラム | |
| JP6664746B2 (ja) | 歩行評価システムおよび歩行評価システムの作動方法 | |
| US7912672B2 (en) | Method and device for evaluating displacement signals | |
| JP6658077B2 (ja) | つまずきリスクの評価方法 | |
| JP6127873B2 (ja) | 歩行特徴の解析方法 | |
| CN111698952B (zh) | 认知功能评估装置、系统和方法、及程序记录介质 | |
| KR102235926B1 (ko) | 스마트 인솔을 통한 보행 데이터 분석 시스템 | |
| JP6127455B2 (ja) | 歩行年齢評価方法 | |
| JP6603055B2 (ja) | 体力推定方法 | |
| JP6829988B2 (ja) | 運動量推定装置、運動量推定プログラム、及び運動量推定システム | |
| JP2020120807A (ja) | 転倒リスク評価装置、転倒リスク評価方法及び転倒リスク評価プログラム | |
| JP6844284B2 (ja) | 歩容の評価方法 | |
| CN110638459A (zh) | 一种基于加速度传感器的人体运动跌倒检测装置及方法 | |
| CN110495890A (zh) | 检测方法、检测装置以及检测系统 | |
| WO2018211550A1 (ja) | 情報処理装置、情報処理システム及び情報処理方法 | |
| JP2012161402A (ja) | 運動特性評価システムおよび運動特性評価方法 | |
| JP6303746B2 (ja) | 歩行目標の設定方法 | |
| KR101746619B1 (ko) | 보행분석장치 및 이를 이용한 보행분석방법 | |
| JP6573104B2 (ja) | 指標導出装置、ウェアラブル機器及び携帯機器 | |
| JP6127454B2 (ja) | 歩行年齢表示システム | |
| JP5915990B2 (ja) | つまずきリスク評価装置、つまずきリスク評価システム | |
| JP6738249B2 (ja) | 歩行分析方法及び歩行分析装置 | |
| JP6917047B2 (ja) | 複数のウェアラブルなセンサによる運動機能評価システム | |
| JP4723078B2 (ja) | 体脂肪計 | |
| JP7331810B2 (ja) | 歩行情報取得方法、歩行情報取得装置、及び歩行情報取得システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181203 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190814 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190827 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191024 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200107 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200120 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6658077 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |