JP6672085B2 - 情報処理装置、情報処理方法、及びプログラム - Google Patents
情報処理装置、情報処理方法、及びプログラム Download PDFInfo
- Publication number
- JP6672085B2 JP6672085B2 JP2016120794A JP2016120794A JP6672085B2 JP 6672085 B2 JP6672085 B2 JP 6672085B2 JP 2016120794 A JP2016120794 A JP 2016120794A JP 2016120794 A JP2016120794 A JP 2016120794A JP 6672085 B2 JP6672085 B2 JP 6672085B2
- Authority
- JP
- Japan
- Prior art keywords
- evaluation
- area
- subject
- image
- information processing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/95—Computational photography systems, e.g. light-field imaging systems
- H04N23/958—Computational photography systems, e.g. light-field imaging systems for extended depth of field imaging
- H04N23/959—Computational photography systems, e.g. light-field imaging systems for extended depth of field imaging by adjusting depth of field during image capture, e.g. maximising or setting range based on scene characteristics
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/10—Cameras or camera modules comprising electronic image sensors; Control thereof for generating image signals from different wavelengths
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/80—Camera processing pipelines; Components thereof
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Computing Systems (AREA)
- Theoretical Computer Science (AREA)
- Studio Devices (AREA)
Description
<第1の実施形態の撮像装置の概略構成>
図1を参照して、第1の実施形態の情報処理装置が適用される撮像装置100の概略構成について説明する。本実施形態の撮像装置100は、被写体等を撮影して、動画や静止画のデータを磁気テープや固体メモリ、光ディスクや磁気ディスクなどの各種記録メディアに記録可能なデジタルスチルカメラやビデオカメラなどに適用可能である。その他、本実施形態の撮像装置は、スマートフォンやタブレット端末などの各種携帯端末に搭載されているカメラ、工業用カメラ、車載カメラ、医療用カメラなどにも適用可能である。
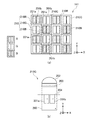
以下、図2(a)、図2(b)を参照して、本実施形態の撮像装置100の撮像素子141の概略的な画素構造について説明する。図2(a)は、撮像素子141の概略的な画素配列の説明に用いる図であり、図2(b)は、撮像素子141のなかの一つの画素210GのZ−X平面による概略的な断面図である。
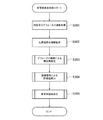
図3を参照して、本実施形態の撮像装置100における被写体決定処理全体の流れについて説明する。なお、図3のフローチャートの各処理は、本実施形態に係るプログラムを例えばCPU等が実行することにより実現されてもよい。以下の説明では、図3の各処理のステップS301〜ステップS305を、S301〜S305と略記し、このことは他のフローチャートの説明の際にも同様とする。図3のフローチャートの処理は、例えば撮像装置100において撮像が行われている状態で、例えば操作スイッチ156を介してユーザから被写体追跡の開始を指示する操作が行われたときにスタートする。
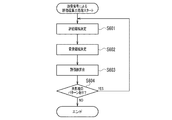
図4及び図5を参照して、図3のS303における被写体領域の推定処理について説明する。図4は、図3のS303の被写体領域推定処理の詳細なフローチャートである。図5(a)は、前述したA+B像の入力画像データ(入力画像501)を示した図である。図5(b)は図中格子状の小四角形で表される各画素(以下、評価画素と表記する。)に対応した、各評価値(以下、画素評価値と表記する。)の一例を示す図である。本実施形態では、各評価画素に対する画素評価値として、その評価画素の位置におけるデフォーカス情報を用いる。
図6、図7(a)〜図7(o)及び図8を参照して、図3のS304における画像信号による評価領域に対する領域評価値算出処理について説明する。図6は、図3のS304の領域評価値算出処理の詳細なフローチャートである。図7(a)〜図7(o)は、それぞれ入力画像701のなかの指定位置702と評価領域候補703の例を示す図である。なお、図7(a)〜図7(o)では、図示を簡略にするため、入力画像の参照符号(701)、指定位置の参照符号(702)、評価領域候補の参照符号(703)については、図7(a)と図7(o)にのみ付与し、図7(b)〜図7(n)では省略している。図8は、入力画像801における指定位置802、評価領域803、背景領域804の一例を示す図である。

図9及び図10(a)〜図10(c)を参照して、図3のS305における被写体領域決定処理の詳細について説明する。図9は、図3のS305の被写体領域決定処理の詳細なフローチャートである。図10(a)〜図10(c)は、それぞれ入力画像1001、推定領域1002、評価領域1003の一例を示す図である。
以下、第2の実施形態の撮像装置100について説明する。第2の実施形態の撮像装置100の構成は前述した図1と同じであるため、その説明は省略する。以下、第2の実施形態の被写体領域決定処理について、第1の実施形態の被写体領域決定処理とは異なる処理についてのみ説明する。第2の実施形態の場合、図3のS303のデフォーカス情報(デフォーカス値)による被写体推定処理と、図3のS305における被写体領域決定処理とが、前述の第1の実施形態の例とは異なる。
図11は、第2の実施形態の場合の、図3のS303におけるデフォーカス値(デフォーカス情報)を用いた被写体推定処理の流れを示すフローチャートである。
図11のフローチャートにおいて、S1101では、被写体領域決定部162は、前述の図7(a)〜図7(o)で示したような複数の評価領域候補のなかから、デフォーカス値を領域評価値として用いて評価を行う評価領域を決定する。なお、複数の評価領域候補のなかから優先的に用いる評価領域を決定する処理は、前述の図6のS601の処理と同様であるため、その説明は省略する。S1101の後、被写体領域決定部162は、S1102に処理を進める。
前述した図10(a)〜図10(c)と図12を参照して、第2の実施形態における被写体領域決定の詳細な流れについて説明する。図12は、第2の実施形態の場合の図3のS305における被写体領域決定処理の詳細なフローチャートである。
W=NP0/NP1 ・・・式(3)
式(3)において、NP0は推定領域に内包される評価領域の画素数であり、NP1は全ての評価領域の画素数である。
本発明は、上述の実施形態の1以上の機能を実現するプログラムを、ネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサーがプログラムを読出し実行する処理でも実現可能である。また、本発明は、上述の実施形態の各機能は回路(例えばASIC)とプログラムとの協働により実現することも可能である。
Claims (16)
- 撮影画像から被写体領域を決定する情報処理装置であって、
前記撮影画像の中の各位置におけるデフォーカス値と、前記撮影画像のなかで被写体として指定された位置を取得する取得手段と、
前記各位置におけるデフォーカス値と前記指定された位置におけるデフォーカス値との差分に基づいて、前記撮影画像のなかで指定された被写体の推定領域を決定する推定手段と、
前記指定された位置に対して設定される複数の評価領域の各々から算出された評価値に基づいて、前記撮影画像から被写体領域を決定する決定手段と、を有し、
前記決定手段は、前記推定領域に内包される評価領域の評価値に対して、前記推定領域に内包されない評価領域の評価値よりも優先されるように重み付けを行うことを特徴とする情報処理装置。 - 前記決定手段は、前記推定領域に内包される評価領域のなかから、前記評価値に基づいて選択した評価領域を、前記被写体領域として決定することを特徴とする請求項1に記載の情報処理装置。
- 前記決定手段は、前記指定された位置に応じて、少なくとも中心位置又はサイズが異なる一つ以上の評価領域を設定することを特徴とする請求項1または2に記載の情報処理装置。
- 前記決定手段は、前記評価領域のサイズに基づき、前記評価領域ごとに中心位置のずらし量を決定することを特徴とする請求項3に記載の情報処理装置。
- 前記決定手段は、前記評価領域ごとに、前記評価領域の画像信号と前記評価領域の周辺の画像信号との間の相違度を、前記評価領域の評価値として算出し、前記推定領域と一つ以上の評価領域及び前記評価領域ごとの評価値とを用いて、前記被写体領域を決定することを特徴とする請求項1乃至4のいずれか1項に記載の情報処理装置。
- 前記決定手段は、前記相違度が大きいほど、前記評価値を高くすることを特徴とする請求項5に記載の情報処理装置。
- 前記相違度は、色相、彩度、および、輝度の少なくともいずれかの相違度であることを特徴とする請求項5または6に記載の情報処理装置。
- 前記推定手段は、一つ以上の第2の評価領域を設定し、前記第2の評価領域ごとに各画素の評価値を算出し、前記各画素の評価値に基づいて、前記一つ以上の第2の評価領域のなかから前記推定領域を決定することを特徴とする請求項1乃至7のいずれか1項に記載の情報処理装置。
- 前記推定手段は、前記指定された位置に応じて、少なくとも位置又はサイズが異なる、一つ以上の第2の評価領域を設定することを特徴とする請求項8に記載の情報処理装置。
- 前記推定手段は、前記第2の評価領域ごとに、前記第2の評価領域の各画素のデフォーカス情報と前記第2の評価領域の周辺の各画素のデフォーカス情報との間の相違度を、前記各画素の評価値として算出することを特徴とする請求項8または9に記載の情報処理装置。
- 前記指定された位置は、ユーザによる操作によって指定された位置であることを特徴とする請求項1乃至10のいずれか1項に記載の情報処理装置。
- 前記決定手段によって決定された前記被写体領域を用いてマッチング処理を行うことで、前記被写体領域の追跡を行う追跡手段を有することを特徴とする請求項1乃至11のいずれか1項に記載の情報処理装置。
- 撮影画像の画像信号を生成する撮像手段と、
前記撮影画像の中の各画素の位置におけるデフォーカス情報を生成する生成手段と、
前記撮影画像のなかで被写体の位置を指定する指定手段と、
請求項1乃至12のいずれか1項に記載の情報処理装置と、
を有することを特徴とする撮像装置。 - 前記撮像手段は、第1の画像信号と、前記第1の画像信号に対して視差を有する第2の画像信号を生成するための画像信号を生成し、
前記生成手段は、前記第1の画像信号と前記第2の画像信号を用いて、前記デフォーカス情報を生成することを特徴とする請求項13に記載の撮像装置。 - 撮影画像から被写体領域を決定する情報処理装置の情報処理方法であって、
前記撮影画像の中の各位置におけるデフォーカス値と、前記撮影画像のなかで被写体として指定された位置を取得する取得ステップと、
前記各位置におけるデフォーカス値と前記指定された位置におけるデフォーカス値との差分に基づいて、前記撮影画像のなかで指定された被写体の推定領域を決定する推定ステップと、
前記指定された位置に対して設定される複数の評価領域の各々から算出された評価値に基づいて、前記撮影画像から被写体領域を決定する決定ステップと、を含み、
前記決定ステップでは、前記推定領域に内包される評価領域の評価値に対して、前記推定領域に内包されない評価領域の評価値よりも優先されるように重み付けを行うことを特徴とする情報処理装置の情報処理方法。 - コンピュータを、請求項1乃至12のいずれか1項に記載の情報処理装置の各手段として機能させるためのプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016120794A JP6672085B2 (ja) | 2016-06-17 | 2016-06-17 | 情報処理装置、情報処理方法、及びプログラム |
| US15/625,067 US10237469B2 (en) | 2016-06-17 | 2017-06-16 | Information processing apparatus, information processing method, and storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016120794A JP6672085B2 (ja) | 2016-06-17 | 2016-06-17 | 情報処理装置、情報処理方法、及びプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017225071A JP2017225071A (ja) | 2017-12-21 |
| JP2017225071A5 JP2017225071A5 (ja) | 2019-07-18 |
| JP6672085B2 true JP6672085B2 (ja) | 2020-03-25 |
Family
ID=60659947
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016120794A Active JP6672085B2 (ja) | 2016-06-17 | 2016-06-17 | 情報処理装置、情報処理方法、及びプログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10237469B2 (ja) |
| JP (1) | JP6672085B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220028951A (ko) | 2020-08-31 | 2022-03-08 | 삼성전자주식회사 | 전자 장치 및 그 제어 방법 |
| JP2023069386A (ja) * | 2021-11-05 | 2023-05-18 | キヤノン株式会社 | 画像計測装置、方法およびプログラム |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003195151A (ja) * | 2001-12-27 | 2003-07-09 | Minolta Co Ltd | オートフォーカス装置 |
| JP5289105B2 (ja) * | 2009-03-05 | 2013-09-11 | キヤノン株式会社 | 画像処理装置およびその制御方法、ならびに、撮像装置 |
| JP5459031B2 (ja) * | 2010-04-13 | 2014-04-02 | ソニー株式会社 | 情報処理装置、情報処理方法及びプログラム |
| KR101026410B1 (ko) | 2010-07-29 | 2011-04-07 | 엘아이지넥스원 주식회사 | 표적 추출 장치와 그 방법, 및 상기 방법을 구현하는 프로그램이 기록된 기록매체 |
| JP2012108263A (ja) * | 2010-11-16 | 2012-06-07 | Nikon Corp | 画像演算装置および画像演算プログラム |
| CN103765276B (zh) * | 2011-09-02 | 2017-01-18 | 株式会社尼康 | 对焦评价装置、摄像装置及程序 |
| JP2013161065A (ja) * | 2012-02-09 | 2013-08-19 | Canon Inc | 撮像装置 |
| JP2014153509A (ja) * | 2013-02-07 | 2014-08-25 | Canon Inc | 撮像装置及び撮像方法 |
| JP5539565B2 (ja) * | 2013-04-09 | 2014-07-02 | キヤノン株式会社 | 撮像装置及び被写体追跡方法 |
-
2016
- 2016-06-17 JP JP2016120794A patent/JP6672085B2/ja active Active
-
2017
- 2017-06-16 US US15/625,067 patent/US10237469B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20170366738A1 (en) | 2017-12-21 |
| JP2017225071A (ja) | 2017-12-21 |
| US10237469B2 (en) | 2019-03-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6405243B2 (ja) | 焦点検出装置及びその制御方法 | |
| US9106837B2 (en) | Image capturing device and image capturing method | |
| US8780224B2 (en) | Imaging device, method and computer readable medium for generating a blur-adjusted image on the basis of a reference image and a non-reference image | |
| JP4286292B2 (ja) | 電子カメラ | |
| JP2005210217A (ja) | ステレオカメラ | |
| JP2014123070A (ja) | 撮像装置及びその制御方法 | |
| JP2012049773A (ja) | 撮像装置および方法、並びにプログラム | |
| KR101889932B1 (ko) | 촬영 장치 및 이에 적용되는 촬영 방법 | |
| JP6095266B2 (ja) | 画像処理装置及びその制御方法 | |
| CN107850753A (zh) | 检测设备、检测方法、检测程序和成像设备 | |
| CN107645632A (zh) | 焦点调节设备、焦点调节方法、摄像设备和存储介质 | |
| JP2023033355A (ja) | 画像処理装置およびその制御方法 | |
| JP4578334B2 (ja) | 撮像レンズの合焦位置決定装置およびその方法 | |
| CN106412419B (zh) | 摄像设备及其控制方法 | |
| JP6463402B2 (ja) | 焦点調節装置および方法、および撮像装置 | |
| JP6672085B2 (ja) | 情報処理装置、情報処理方法、及びプログラム | |
| JP2017060010A (ja) | 撮像装置、撮像装置の制御方法、およびプログラム | |
| JP6608194B2 (ja) | 画像処理装置およびその制御方法ならびにプログラム | |
| US20130194393A1 (en) | Imaging apparatus and method for controlling same | |
| US11115583B2 (en) | Apparatus and method for determination of a focus detection target | |
| JP2017163412A (ja) | 画像処理装置およびその制御方法、撮像装置、プログラム | |
| JP5359930B2 (ja) | 撮像装置、表示方法、および、プログラム | |
| JP5800600B2 (ja) | 撮像装置、撮像方法およびプログラム | |
| JP2018005008A (ja) | カメラボディおよび交換レンズ | |
| JP2017130106A (ja) | データ処理装置、撮像装置、およびデータ処理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190614 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190614 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200129 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200304 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6672085 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |