JP6678092B2 - Dc/dcコンバータの制御装置 - Google Patents
Dc/dcコンバータの制御装置 Download PDFInfo
- Publication number
- JP6678092B2 JP6678092B2 JP2016211780A JP2016211780A JP6678092B2 JP 6678092 B2 JP6678092 B2 JP 6678092B2 JP 2016211780 A JP2016211780 A JP 2016211780A JP 2016211780 A JP2016211780 A JP 2016211780A JP 6678092 B2 JP6678092 B2 JP 6678092B2
- Authority
- JP
- Japan
- Prior art keywords
- reactor
- value
- current
- duty ratio
- converter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Landscapes
- Dc-Dc Converters (AREA)
Description
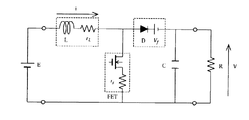
図1は、本発明の実施の形態における電力変換装置(DC/DCコンバータ)100の基本構成を示す。電力変換装置100は、直流電源10、リアクトル12、第1スイッチング素子14、第2スイッチング素子16及びコンデンサ18を含んで構成される。

第1の実施の形態では、リアクトル12を実際に流れるリアクトル電流iLを計測し、そのリアクトル電流iLに基づいてデューティ比dを制御する制御装置104の構成について説明した。第2の実施の形態では、電力変換装置200は、図5に示すように、リアクトル12を流れるリアクトル電流iLを計測するためのセンサを備えない。その代わりに、図6に示すように、制御装置104aに含まれるオブザーバ22aでは、誤差デューティ比推定値Δd〜(=Δd〜(k)(チルダ))に加えて、リアクトル12を流れる電流の推定値であるリアクトル電流推定値iL 〜(チルダ)を算出して出力する。
第1の実施の形態における制御装置104の演算部24及びF/F補償器26に代えて、モデル予測制御器(MPC)50を用いる構成としてもよい。図7は、第3の実施の形態における制御装置104の構成を示す。
第2の実施の形態における制御装置104aの演算部24及びF/F補償器26に代えて、モデル予測制御器(MPC)50aを用いる構成としてもよい。図8は、第4の実施の形態における制御装置104aの構成を示す。電力変換装置200は、リアクトル12を流れるリアクトル電流iLを計測するためのセンサを備えない。その代わりに、図8に示すように、制御装置104aに含まれるオブザーバ22aでは、誤差デューティ比推定値Δd〜(=Δd〜(k)(チルダ))に加えて、リアクトル12を流れる電流の推定値であるリアクトル電流推定値iL 〜(チルダ)を算出して出力する。
第5の実施の形態は、第3の実施の形態におけるMPC50の構成を変更したものである。本実施の形態では、MPC50は、電力変換装置100の状態方程式を第1スイッチング素子14及び第2スイッチング素子16のデューティ比dに対する二次方程式に変形し、当該二次方程式にオブザーバ22で算出された誤差デューティ比推定値Δd〜(=Δd〜(k)(チルダ))を適用することでデューティ比dを算出する。制御装置104は、算出されたデューティ比dを用いて電力変換装置100を制御する。
第6の実施の形態は、第4の実施の形態におけるMPC50aの構成を変更したものである。本実施の形態では、MPC50aは、電力変換装置200の状態方程式を第1スイッチング素子14及び第2スイッチング素子16のデューティ比dに対する二次方程式に変形し、当該二次方程式にオブザーバ22aで算出された誤差デューティ比推定値Δd〜(=Δd〜(k)(チルダ))、リアクトル電流推定値iL 〜(=iL 〜(k)(チルダ))及びコンデンサ電圧推定値vc 〜(=vc 〜(k)(チルダ))を適用することでデューティ比dを算出する。制御装置104aは、算出されたデューティ比dを用いて電力変換装置200を制御する。
電力変換装置100,200において、リアクトル電流に応じてリアクトル12の値L(インダクタンス)は変化する。そこで、第1〜第6の実施の形態における制御において、リアクトル12に流れるリアクトル電流iL又は流れると予想されるリアクトル電流推定値iL 〜に応じてリアクトル12の値L(インダクタンス)を変更することが好適である。
Claims (4)
- DC/DCコンバータを制御する制御装置であって、
前記DC/DCコンバータは、リアクトルと、前記リアクトルに流れる電流を制御する第1スイッチング素子及び第2スイッチング素子と、前記リアクトルからの出力電圧を平滑化させるコンデンサと、
前記DC/DCコンバータの現在の状態値に応じて、前記DC/DCコンバータに含まれるスイッチング素子の実際のオン時間の比を示すデューティ比と指令値であるデューティ比dとの差である誤差デューティ比Δdを推定するオブザーバと、
前記誤差デューティ比Δdを用いて、前記DC/DCコンバータの状態方程式から前記DC/DCコンバータに含まれるリアクトルを流れる電流を制御するための目標値となるリアクトル電流指令値を算出する指令値生成器と、
を備え、
前記オブザーバは、前記誤差デューティ比を外乱としてシステムの状態に含めた外乱オブザーバを構成して、前記誤差デューティ比Δdを推定し、
前記リアクトル電流指令値に応じて前記DC/DCコンバータを制御することを特徴とする制御装置。 - 請求項1に記載の制御装置であって、
前記指令値生成器は、前記DC/DCコンバータの電源の電源電圧v b 、前記コンデンサの両端のコンデンサ電圧v c 及びその指令値v c * 、前記DC/DCコンバータの出力電流i m 、前記リアクトルを流れる電流の測定値であるリアクトル電流iL 並びに前記誤差デューティ比Δdを用いて、前記DC/DCコンバータの状態方程式から前記リアクトルを流れる電流を制御するための目標値となるリアクトル電流指令値を算出することを特徴とする制御装置。 - 請求項1に記載の制御装置であって、
前記DC/DCコンバータの現在の状態値に応じて、前記リアクトルに流れるリアクトル電流推定値iL 〜を推定するオブザーバを更に備え、
前記指令値生成器は、前記DC/DCコンバータの電源の電源電圧v b 、前記コンデンサの両端のコンデンサ電圧v c 及びその指令値v c * 、前記DC/DCコンバータの出力電流i m 、前記リアクトル電流推定値iL 〜 並びに前記誤差デューティ比Δdを用いて、前記DC/DCコンバータの状態方程式から前記リアクトルを流れる電流を制御するための目標値となるリアクトル電流指令値を算出することを特徴とする制御装置。 - 請求項1〜3のいずれか1項に記載の制御装置であって、
前記リアクトルに流れる電流に応じて前記リアクトルの値を設定し、当該リアクトルの値を前記状態方程式に適用することを特徴とする制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016211780A JP6678092B2 (ja) | 2016-10-28 | 2016-10-28 | Dc/dcコンバータの制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016211780A JP6678092B2 (ja) | 2016-10-28 | 2016-10-28 | Dc/dcコンバータの制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018074744A JP2018074744A (ja) | 2018-05-10 |
| JP6678092B2 true JP6678092B2 (ja) | 2020-04-08 |
Family
ID=62112921
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016211780A Expired - Fee Related JP6678092B2 (ja) | 2016-10-28 | 2016-10-28 | Dc/dcコンバータの制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6678092B2 (ja) |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007015182A2 (en) * | 2005-08-01 | 2007-02-08 | Nxp B.V. | Dc-dc converter with switchable estimators |
| JP4466620B2 (ja) * | 2006-07-10 | 2010-05-26 | トヨタ自動車株式会社 | 電源システムおよびそれを備える車両 |
| JP2010068611A (ja) * | 2008-09-10 | 2010-03-25 | Toyota Motor Corp | コンバータの制御装置 |
| JP5488097B2 (ja) * | 2010-03-24 | 2014-05-14 | トヨタ自動車株式会社 | 電流推定装置およびdcdcコンバータ制御システム |
| JP5659727B2 (ja) * | 2010-11-19 | 2015-01-28 | 宇部興産機械株式会社 | クレーン振れ角検出方法及び装置、並びにクレーン振れ止め制御方法及び装置 |
| JP6183130B2 (ja) * | 2013-10-09 | 2017-08-23 | トヨタ自動車株式会社 | モータ駆動システム |
-
2016
- 2016-10-28 JP JP2016211780A patent/JP6678092B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018074744A (ja) | 2018-05-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5979169B2 (ja) | 電圧変換装置 | |
| JP5381026B2 (ja) | 複合電源装置の制御回路 | |
| WO2017047698A1 (ja) | 電力変換装置および駆動装置 | |
| JP5928401B2 (ja) | コンバータ装置 | |
| JP6962233B2 (ja) | 車載用のdcdcコンバータ | |
| US9799936B2 (en) | Fuel cell system and fuel cell automobile | |
| JP5136093B2 (ja) | Dc−dcコンバータの制御装置 | |
| CN104953834A (zh) | 基于lqr最优控制的dc-dc变换器数字化控制方法 | |
| JP6653645B2 (ja) | Dc/dcコンバータの制御装置 | |
| JP6669630B2 (ja) | Dc/dcコンバータの制御装置 | |
| JP6678092B2 (ja) | Dc/dcコンバータの制御装置 | |
| JP6183130B2 (ja) | モータ駆動システム | |
| JP2015201937A (ja) | 電圧変換装置 | |
| JP5548383B2 (ja) | コンバータの制御装置 | |
| CN113809919A (zh) | 电力供给系统、控制装置以及电抗器电流测定方法 | |
| JP6776203B2 (ja) | Dc/dcコンバータの制御装置 | |
| JP6718795B2 (ja) | Dc/dcコンバータの制御装置 | |
| JP2015202018A (ja) | 電圧変換装置 | |
| JP6685967B2 (ja) | Dc/dcコンバータの制御装置 | |
| JP6685966B2 (ja) | Dc/dcコンバータの制御装置 | |
| JP2010022136A (ja) | Dc/dcコンバータの制御装置及び制御方法 | |
| WO2019150921A1 (ja) | 車載用電源装置の異常検出装置及び車載用電源装置 | |
| JP2018074747A (ja) | Dc/dcコンバータの制御装置 | |
| JP2010178443A (ja) | モータ制御システム | |
| CN113630006A (zh) | 直流变换器非线性控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190306 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200110 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200121 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200220 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200310 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200316 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6678092 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |