JP6723820B2 - 画像生成装置、画像表示システムおよび画像表示方法 - Google Patents
画像生成装置、画像表示システムおよび画像表示方法 Download PDFInfo
- Publication number
- JP6723820B2 JP6723820B2 JP2016099603A JP2016099603A JP6723820B2 JP 6723820 B2 JP6723820 B2 JP 6723820B2 JP 2016099603 A JP2016099603 A JP 2016099603A JP 2016099603 A JP2016099603 A JP 2016099603A JP 6723820 B2 JP6723820 B2 JP 6723820B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- vehicle
- intention
- detected
- virtual viewpoint
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/20—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/22—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle
- B60R1/23—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with a predetermined field of view
- B60R1/27—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with a predetermined field of view providing all-round vision, e.g. using omnidirectional cameras
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/002—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles specially adapted for covering the peripheral part of the vehicle, e.g. for viewing tyres, bumpers or the like
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/20—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/22—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle
- B60R1/28—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with an adjustable field of view
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T11/00—Two-dimensional [2D] image generation
- G06T11/60—Creating or editing images; Combining images with text
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T15/00—Three-dimensional [3D] image rendering
- G06T15/10—Geometric effects
- G06T15/20—Perspective computation
- G06T15/205—Image-based rendering
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/18—Eye characteristics, e.g. of the iris
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
- H04N7/181—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast for receiving images from a plurality of remote sources
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/20—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of display used
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/30—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing
- B60R2300/303—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing using joined images, e.g. multiple camera images
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/60—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by monitoring and displaying vehicle exterior scenes from a transformed perspective
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/80—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement
- B60R2300/802—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement for monitoring and displaying vehicle exterior blind spot views
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/80—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement
- B60R2300/8033—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement for pedestrian protection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/80—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement
- B60R2300/8053—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement for bad weather conditions or night vision
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/80—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement
- B60R2300/8086—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement for vehicle path indication
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10016—Video; Image sequence
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Mechanical Engineering (AREA)
- Signal Processing (AREA)
- Geometry (AREA)
- Computer Graphics (AREA)
- Computing Systems (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Ophthalmology & Optometry (AREA)
- Human Computer Interaction (AREA)
- Closed-Circuit Television Systems (AREA)
- Controls And Circuits For Display Device (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
- Image Processing (AREA)
Description
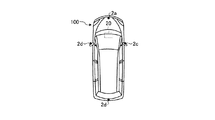
2a〜2d 撮像装置
10 画像生成装置
11 画像処理部
12 検出部
13 記憶処理部
14 記憶部
20 表示部
Claims (10)
- 自車両に設けられた複数の撮像装置によって撮像された撮像画像に基づき、仮想視点から見た合成画像を生成して表示部へ出力する画像処理部と、
前記自車両に対してなされた運転操作に基づき、前記自車両を進行方向に対して右側または左側へ移動させる右左折および進路変更を含む意思表示を検出する検出部と
を備え、
前記画像処理部は、
前記検出部によって前記意思表示が検出された場合に、検出された前記意思表示に対応する側の前記自車両の側面を前記進行方向の前方側から見た前記合成画像を生成するとともに、検出された前記意思表示が前記右左折であるか前記進路変更であるかに応じて前記仮想視点の位置を変化させ、
前記意思表示が前記右左折である場合の前記仮想視点の位置は、前記意思表示が前記進路変更である場合の前記仮想視点の位置に比べて前記自車両から遠い側に設定されること
を特徴とする画像生成装置。 - 前記画像処理部は、
検出された前記意思表示に対応する側の前記自車両の側面を前記進行方向の前方側かつ前記自車両の外部から見た前記合成画像を生成すること
を特徴とする請求項1に記載の画像生成装置。 - 前記画像処理部は、
前記自車両を進行方向に対して左側へ移動させる前記意思表示が検出された場合には、前記進行方向に対して左前方側の外部から前記自車両の左側面を見た前記合成画像を生成し、前記自車両を進行方向に対して右側へ移動させる前記意思表示が検出された場合には、前記進行方向に対して右前方側の外部から前記自車両の右側面を見た前記合成画像を生成すること
を特徴とする請求項2に記載の画像生成装置。 - 前記画像処理部は、
検出された前記意思表示に対応する側の前記自車両の側面に設けられるサイドミラーの位置として予め決められた位置から前記自車両の側面を見た前記合成画像を生成すること
を特徴とする請求項1〜3のいずれか一つに記載の画像生成装置。 - 前記画像処理部は、
検出された前記意思表示に対応する側の前記自車両の側面を前記進行方向の前方側かつ前記自車両の内部から見た前記合成画像を生成すること
を特徴とする請求項1に記載の画像生成装置。 - 前記画像処理部は、
前記進行方向が後退方向である場合、検出された前記意思表示に対応する側の前記自車両の側面を前記自車両の後方側から見た前記合成画像を生成し、前記自車両から前記自車両の後方を見た画像とともに前記表示部へ出力すること
を特徴とする請求項1〜5のいずれか一つに記載の画像生成装置。 - 前記画像処理部は、
前記合成画像を反転させて前記表示部へ出力すること
を特徴とする請求項1〜6のいずれか一つに記載の画像生成装置。 - 複数の前記仮想視点のうち選択された前記仮想視点を前記意思表示と対応付けて記憶部に記憶させる記憶処理部
を備え、
前記画像処理部は、
検出された前記意思表示に対応する側の前記自車両の側面を、検出された前記意思表示に対応付けて記憶された前記仮想視点から見た前記合成画像を生成すること
を特徴とする請求項1〜7のいずれか一つに記載の画像生成装置。 - 請求項1〜8のいずれか一つに記載の画像生成装置と、
前記画像生成装置によって生成された画像を表示する表示部と
を備えることを特徴とする画像表示システム。 - 自車両に設けられた複数の撮像装置によって撮像された撮像画像に基づき、仮想視点から見た合成画像を生成して表示部へ出力する画像処理工程と、
前記自車両に対してなされた運転操作に基づき、前記自車両を進行方向に対して右側または左側へ移動させる右左折および進路変更を含む意思表示を検出する検出工程と
を含み、
前記画像処理工程は、
前記検出工程において前記意思表示を検出した場合に、検出した前記意思表示に対応する側の前記自車両の側面を前記進行方向の前方側から見た前記合成画像を生成するとともに、検出された前記意思表示が前記右左折であるか前記進路変更であるかに応じて前記仮想視点の位置を変化させ、
前記意思表示が前記右左折である場合の前記仮想視点の位置は、前記意思表示が前記進路変更である場合の前記仮想視点の位置に比べて前記自車両から遠い側に設定されること
を特徴とする画像表示方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016099603A JP6723820B2 (ja) | 2016-05-18 | 2016-05-18 | 画像生成装置、画像表示システムおよび画像表示方法 |
| US15/492,313 US10703275B2 (en) | 2016-05-18 | 2017-04-20 | Image generation apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016099603A JP6723820B2 (ja) | 2016-05-18 | 2016-05-18 | 画像生成装置、画像表示システムおよび画像表示方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017208690A JP2017208690A (ja) | 2017-11-24 |
| JP6723820B2 true JP6723820B2 (ja) | 2020-07-15 |
Family
ID=60329815
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016099603A Active JP6723820B2 (ja) | 2016-05-18 | 2016-05-18 | 画像生成装置、画像表示システムおよび画像表示方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10703275B2 (ja) |
| JP (1) | JP6723820B2 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6849430B2 (ja) * | 2016-12-27 | 2021-03-24 | キヤノン株式会社 | 画像処理装置、画像処理方法、及びプログラム |
| JP6939494B2 (ja) * | 2017-12-11 | 2021-09-22 | トヨタ自動車株式会社 | 画像表示装置 |
| JP6717516B2 (ja) * | 2017-12-26 | 2020-07-01 | 株式会社音楽館 | 画像生成システム、画像生成方法及びプログラム |
| EP3776485B1 (en) * | 2018-09-26 | 2022-01-26 | Coherent Logix, Inc. | Any world view generation |
| JP7160701B2 (ja) * | 2019-01-23 | 2022-10-25 | 株式会社小松製作所 | 作業機械のシステム及び方法 |
| JP7222254B2 (ja) * | 2019-01-25 | 2023-02-15 | 株式会社アイシン | 周辺表示制御装置 |
| JP7316620B2 (ja) * | 2019-02-15 | 2023-07-28 | トヨタ モーター ヨーロッパ | 画像正規化のためのシステムと方法 |
| US20230061195A1 (en) * | 2021-08-27 | 2023-03-02 | Continental Automotive Systems, Inc. | Enhanced transparent trailer |
| JP2024044213A (ja) * | 2022-09-20 | 2024-04-02 | トヨタ自動車株式会社 | 車両用表示制御装置 |
| JP2024144827A (ja) * | 2023-03-31 | 2024-10-15 | 本田技研工業株式会社 | 再現システム、再現方法、および再現プログラム |
Family Cites Families (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2000020257A1 (en) * | 1998-10-08 | 2000-04-13 | Matsushita Electric Industrial Co., Ltd. | Driving assisting device and recording medium |
| EP1179958B1 (en) * | 1999-04-16 | 2012-08-08 | Panasonic Corporation | Image processing device and monitoring system |
| JP4593070B2 (ja) | 2001-12-12 | 2010-12-08 | 株式会社エクォス・リサーチ | 車両の画像処理装置 |
| JP2005242606A (ja) | 2004-02-26 | 2005-09-08 | Olympus Corp | 画像生成装置、画像生成プログラム、及び画像生成方法 |
| JP4573242B2 (ja) * | 2004-11-09 | 2010-11-04 | アルパイン株式会社 | 運転支援装置 |
| JP2007099261A (ja) * | 2005-09-12 | 2007-04-19 | Aisin Aw Co Ltd | 駐車支援方法及び駐車支援装置 |
| US8218007B2 (en) * | 2007-09-23 | 2012-07-10 | Volkswagen Ag | Camera system for a vehicle and method for controlling a camera system |
| JP5057936B2 (ja) * | 2007-11-09 | 2012-10-24 | アルパイン株式会社 | 鳥瞰画像生成装置および方法 |
| JP5344227B2 (ja) * | 2009-03-25 | 2013-11-20 | アイシン精機株式会社 | 車両用周辺監視装置 |
| JP2010274813A (ja) * | 2009-05-29 | 2010-12-09 | Fujitsu Ten Ltd | 画像生成装置及び画像表示システム |
| JP5271154B2 (ja) * | 2009-05-29 | 2013-08-21 | 富士通テン株式会社 | 画像生成装置及び画像表示システム |
| JP5412979B2 (ja) | 2009-06-19 | 2014-02-12 | コニカミノルタ株式会社 | 周辺表示装置 |
| JP5031801B2 (ja) * | 2009-07-28 | 2012-09-26 | 日立オートモティブシステムズ株式会社 | 車載用画像表示装置 |
| JP5209578B2 (ja) | 2009-07-28 | 2013-06-12 | 東芝アルパイン・オートモティブテクノロジー株式会社 | 車両用画像表示装置 |
| JP5077307B2 (ja) * | 2009-08-05 | 2012-11-21 | 株式会社デンソー | 車両周囲画像表示制御装置 |
| EP2473871B1 (en) * | 2009-09-01 | 2015-03-11 | Magna Mirrors Of America, Inc. | Imaging and display system for vehicle |
| JP5251804B2 (ja) * | 2009-09-18 | 2013-07-31 | 三菱自動車工業株式会社 | 運転支援装置 |
| CN102577372B (zh) * | 2009-09-24 | 2015-06-10 | 松下电器产业株式会社 | 驾驶辅助显示装置 |
| JP5387763B2 (ja) * | 2010-05-25 | 2014-01-15 | 富士通株式会社 | 映像処理装置、映像処理方法及び映像処理プログラム |
| JP5681569B2 (ja) * | 2011-05-31 | 2015-03-11 | 富士通テン株式会社 | 情報処理システム、サーバ装置、および、車載装置 |
| JP5682788B2 (ja) * | 2011-09-27 | 2015-03-11 | アイシン精機株式会社 | 車両周辺監視装置 |
| JP5961472B2 (ja) * | 2012-07-27 | 2016-08-02 | 日立建機株式会社 | 作業機械の周囲監視装置 |
| KR101376210B1 (ko) * | 2012-08-06 | 2014-03-21 | 현대모비스 주식회사 | 어라운드 뷰 모니터 시스템 및 모니터링 방법 |
| JP6130118B2 (ja) * | 2012-09-28 | 2017-05-17 | 富士通テン株式会社 | 画像処理システム、画像処理装置、画像処理方法、及び、プログラム |
| JP5854154B2 (ja) * | 2012-11-27 | 2016-02-09 | 日産自動車株式会社 | 加減速誤操作判定装置、誤操作加速抑制制御装置、加減速誤操作判定方法 |
| US9654740B2 (en) * | 2013-05-28 | 2017-05-16 | International Business Machines Corporation | Controlling automotive rear-view mirror based on eye movement |
| JP5479639B2 (ja) | 2013-06-19 | 2014-04-23 | 富士通テン株式会社 | 画像処理装置、画像処理システム、および、画像処理方法 |
| US20160176343A1 (en) * | 2013-08-30 | 2016-06-23 | Clarion Co., Ltd. | Camera Calibration Device, Camera Calibration System, and Camera Calibration Method |
| KR101470240B1 (ko) * | 2013-11-14 | 2014-12-08 | 현대자동차주식회사 | 주차 영역 검출 장치 및 그 방법 |
| DE102015202846B4 (de) * | 2014-02-19 | 2020-06-25 | Magna Electronics, Inc. | Fahrzeugsichtsystem mit Anzeige |
| US9720410B2 (en) * | 2014-03-03 | 2017-08-01 | Waymo Llc | Remote assistance for autonomous vehicles in predetermined situations |
| WO2015194501A1 (ja) * | 2014-06-20 | 2015-12-23 | クラリオン株式会社 | 映像合成システムとそのための映像合成装置及び映像合成方法 |
| JP6406159B2 (ja) * | 2015-08-04 | 2018-10-17 | 株式会社デンソー | 車載表示制御装置、車載表示制御方法 |
| WO2017110144A1 (ja) * | 2015-12-22 | 2017-06-29 | 株式会社Jvcケンウッド | 俯瞰映像生成装置、俯瞰映像生成システム、俯瞰映像生成方法およびプログラム |
| CN108778784B (zh) * | 2016-01-14 | 2021-10-15 | 大陆汽车系统公司 | 用于车辆和拖车组件的倒车系统和用于控制其的方法 |
| JP6669569B2 (ja) * | 2016-04-04 | 2020-03-18 | アルパイン株式会社 | 車両用周辺監視装置 |
-
2016
- 2016-05-18 JP JP2016099603A patent/JP6723820B2/ja active Active
-
2017
- 2017-04-20 US US15/492,313 patent/US10703275B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017208690A (ja) | 2017-11-24 |
| US20170334356A1 (en) | 2017-11-23 |
| US10703275B2 (en) | 2020-07-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6723820B2 (ja) | 画像生成装置、画像表示システムおよび画像表示方法 | |
| US12220825B2 (en) | Display apparatus | |
| CN111186376B (zh) | 车辆电子镜系统 | |
| CN102474597B (zh) | 车辆周围图像生成装置 | |
| CN103692973B (zh) | 图像生成装置、图像显示系统、以及图像生成方法 | |
| JP5858650B2 (ja) | 画像生成装置、画像表示システム、及び、画像生成方法 | |
| EP3967554B1 (en) | Vehicular display system | |
| JP5251804B2 (ja) | 運転支援装置 | |
| JP2020120327A (ja) | 周辺表示制御装置 | |
| JP2018144526A (ja) | 周辺監視装置 | |
| JP2020088697A (ja) | 周辺監視装置 | |
| US10793069B2 (en) | Method for assisting the driver of a motor vehicle in maneuvering the motor vehicle with a trailer, driver assistance system as well as vehicle/trailer combination | |
| JP2021013072A (ja) | 画像処理装置および画像処理方法 | |
| JP4248570B2 (ja) | 画像処理装置並びに視界支援装置及び方法 | |
| CN113060156B (zh) | 车辆周围监视装置、车辆、车辆周围监视方法和程序 | |
| WO2018061261A1 (ja) | 表示制御装置 | |
| JP6439233B2 (ja) | 車両用画像表示装置及び画像処理方法 | |
| WO2022202780A1 (ja) | 表示制御装置 | |
| JP5605605B2 (ja) | 車両周辺監視装置 | |
| US20220086368A1 (en) | Vehicular display system | |
| JP2019038372A (ja) | 画像表示装置 | |
| JP6586972B2 (ja) | 車両用画像表示装置及び画像処理方法 | |
| JP2004328216A (ja) | 車載立体ディスプレイシステム | |
| JP2022048456A (ja) | 車両用表示装置 | |
| JP2022048458A (ja) | 車両用表示装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190426 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200214 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200303 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200501 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200602 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200624 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6723820 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |