JP6748143B2 - 光センサおよび電子機器 - Google Patents
光センサおよび電子機器 Download PDFInfo
- Publication number
- JP6748143B2 JP6748143B2 JP2018087342A JP2018087342A JP6748143B2 JP 6748143 B2 JP6748143 B2 JP 6748143B2 JP 2018087342 A JP2018087342 A JP 2018087342A JP 2018087342 A JP2018087342 A JP 2018087342A JP 6748143 B2 JP6748143 B2 JP 6748143B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- light emitting
- emitting element
- optical sensor
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4814—Constructional features, e.g. arrangements of optical elements of transmitters alone
- G01S7/4815—Constructional features, e.g. arrangements of optical elements of transmitters alone using multiple transmitters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/14—Measuring arrangements characterised by the use of optical techniques for measuring distance or clearance between spaced objects or spaced apertures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/10—Systems determining position data of a target for measuring distance only using transmission of interrupted, pulse-modulated waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4865—Time delay measurement, e.g. time-of-flight measurement, time of arrival measurement or determining the exact position of a peak
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Measurement Of Optical Distance (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Light Receiving Elements (AREA)
Description
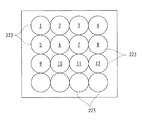
図1〜図3は本発明の実施形態1に係る光センサ1に関し、図1は光センサ1の光学系を模式的に示す説明図、図2は光センサ1の発光素子部2による照射範囲213、223を示す説明図、図3は発光素子部2の第2発光素子22による照射範囲223を示す説明図である。
図4〜図7は、実施形態2に係る光センサ1に関し、図4は発光スポット20の一例を示す断面図、図5は第1発光素子21の駆動の様子を模式的に示す説明図、図6は第2発光素子22の駆動の様子を模式的に示す説明図、図7は発光スポット20の出射光のファーフィールドパターンを示す説明図である。
図8および図9は、実施形態3に係る光センサ1の構成を示す説明図であり、図10(a)および図10(b)は、光センサ1を適用した電子機器の例を示す説明図である。この形態に係る光センサ1では、発光素子部2に備えられた発光スポット20が、光屈折材料6を介して測定対象物4に光照射するように構成されている。
図11および図12は、実施形態4に係る光センサ1の構成を示す説明図である。この形態に係る光センサ1では、発光素子部2と受光素子部3との対応づけを含む構成とされている。
図13は、実施形態5に係る光センサ1の構成を示す説明図である。この形態に係る光センサ1では、実施形態4に示した構成に加えて、受光素子部3において駆動させる受光素子31についても絞り込みを行うように構成されている。
2 発光素子部
20 発光スポット
21 第1発光素子
211 第1信号光
212 光軸
213 照射範囲
22 第2発光素子
221 第2信号光
222 光軸
223 照射範囲
23 チップ
3 受光素子部
31 受光素子
4 測定対象物
5 VCSEL
6 光屈折材料
61 密領域
62 疎領域
10 電子機器
Claims (8)
- 出射方向を中心として所定の広がりを有する信号光を出射する発光素子部と、測定対象物に反射された信号光を受光する受光素子部とを備え、前記受光素子部が受光した信号光に基づいて前記測定対象物までの距離を検出する光センサであって、
前記発光素子部には複数の発光スポットが配列され、前記発光スポットは、少なくとも、前記信号光の指向角が異なる一つの第1発光素子と複数の第2発光素子とを含み、
前記第1発光素子は前記第2発光素子よりも指向角の広い信号光を出射する面発光型半導体レーザであり、
前記一つの第1発光素子の照射範囲には、前記複数の第2発光素子による照射範囲が包含されていることを特徴とする光センサ。 - 請求項1に記載の光センサにおいて、
前記第1発光素子および前記第2発光素子は同一平面上に配列されたことを特徴とする光センサ。 - 請求項1または2に記載の光センサにおいて、
前記発光素子部における信号光の出射方向には、光屈折材料が配設されていることを特徴とする光センサ。 - 請求項3に記載の光センサにおいて、
前記発光スポットは、前記複数の第2発光素子が密に配列された領域と疎に配列された領域とを有することを特徴とする光センサ。 - 請求項1〜4のいずれか一つの請求項に記載の光センサにおいて、
前記第1発光素子の駆動後に、前記第2発光素子が駆動されることを特徴とする光センサ。 - 請求項1〜5のいずれか一つの請求項に記載の光センサにおいて、
前記受光素子部は、前記第1発光素子が出射する第1信号光または前記第2発光素子が出射する第2信号光を受光して受光信号を出力する複数の受光素子を備え、前記第1信号光の受光信号に基づいて当該第1信号光の照射範囲に出射する第2発光素子が選択されて駆動されることを特徴とする光センサ。 - 請求項6に記載の光センサにおいて、
前記受光素子部は、前記複数の受光素子のうち、前記第1信号光の受光信号に基づいて選択された前記第2発光素子の第2信号光を受光する受光素子を駆動させることを特徴とする光センサ。 - 請求項1〜7のいずれか一つの請求項に記載の光センサを備えることを特徴とする電子機器。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018087342A JP6748143B2 (ja) | 2018-04-27 | 2018-04-27 | 光センサおよび電子機器 |
| US16/380,348 US20190331769A1 (en) | 2018-04-27 | 2019-04-10 | Optical sensor and electronic apparatus |
| CN201910310625.0A CN110412608A (zh) | 2018-04-27 | 2019-04-17 | 光传感器及电子设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018087342A JP6748143B2 (ja) | 2018-04-27 | 2018-04-27 | 光センサおよび電子機器 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019191109A JP2019191109A (ja) | 2019-10-31 |
| JP6748143B2 true JP6748143B2 (ja) | 2020-08-26 |
Family
ID=68292279
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018087342A Active JP6748143B2 (ja) | 2018-04-27 | 2018-04-27 | 光センサおよび電子機器 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20190331769A1 (ja) |
| JP (1) | JP6748143B2 (ja) |
| CN (1) | CN110412608A (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116755107A (zh) * | 2020-01-23 | 2023-09-15 | 华为技术有限公司 | 一种飞行时间tof传感模组及电子设备 |
| JP7005843B1 (ja) | 2020-08-06 | 2022-01-24 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッド | 測距装置、撮像装置、及び撮像システム |
| EP4204848A4 (en) * | 2020-10-30 | 2024-10-09 | Waymo LLC | LASER DISTANCE DETECTION AND MEASUREMENT (LIDAR) DEVICES WITH VERTICAL CAVITY SURFACE EMITTING LASER (VCSEL) EMITTERS |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0833445B2 (ja) * | 1987-10-08 | 1996-03-29 | 株式会社ナブコ | 光学検知装置 |
| JPH06118161A (ja) * | 1992-10-02 | 1994-04-28 | Seiko Epson Corp | 光センシング装置 |
| JPH10268051A (ja) * | 1997-03-24 | 1998-10-09 | Unisia Jecs Corp | 障害物検知装置 |
| JP4427954B2 (ja) * | 2003-02-13 | 2010-03-10 | アイシン精機株式会社 | 監視装置 |
| US20040224179A1 (en) * | 2003-05-09 | 2004-11-11 | Lsp Technologies, Inc. | Laser peening method and apparatus using tailored laser beam spot sizes |
| JP2007214300A (ja) * | 2006-02-09 | 2007-08-23 | Sony Corp | 半導体レーザ |
| JP2009152277A (ja) * | 2007-12-19 | 2009-07-09 | Sony Corp | 半導体レーザアレイ、発光装置、表示装置、加工装置および駆動方法 |
| JP2011141142A (ja) * | 2010-01-05 | 2011-07-21 | Sharp Corp | 測距センサおよび電子機器 |
| WO2014023344A1 (de) * | 2012-08-07 | 2014-02-13 | Carl Zeiss Industrielle Messtechnik Gmbh | Verbesserter chromatischer sensor und verfahren |
| JP2014077668A (ja) * | 2012-10-09 | 2014-05-01 | Optex Co Ltd | 寸法計測装置および寸法計測方法 |
| JP6424456B2 (ja) * | 2013-07-17 | 2018-11-21 | セイコーエプソン株式会社 | 発光装置、発光装置の製造方法、受発光装置、電子機器 |
| WO2016002373A1 (ja) * | 2014-07-03 | 2016-01-07 | シャープ株式会社 | 光反射型センサおよび電子機器 |
| WO2016056545A1 (ja) * | 2014-10-09 | 2016-04-14 | コニカミノルタ株式会社 | 走査光学系及び投受光装置 |
| EP3214832B1 (en) * | 2014-10-31 | 2019-11-27 | Fujifilm Corporation | Imaging device and method for recognizing target object |
| US10534074B2 (en) * | 2016-08-31 | 2020-01-14 | Qualcomm Incorporated | Hybrid scanning lidar systems |
| JP6594282B2 (ja) * | 2016-10-06 | 2019-10-23 | オムロンオートモーティブエレクトロニクス株式会社 | レーザレーダ装置 |
| CN106997603B (zh) * | 2017-05-19 | 2020-04-17 | 深圳奥比中光科技有限公司 | 基于vcsel阵列光源的深度相机 |
| CN107219532B (zh) * | 2017-06-29 | 2019-05-21 | 西安知微传感技术有限公司 | 基于mems微扫描镜的三维激光雷达及测距方法 |
-
2018
- 2018-04-27 JP JP2018087342A patent/JP6748143B2/ja active Active
-
2019
- 2019-04-10 US US16/380,348 patent/US20190331769A1/en not_active Abandoned
- 2019-04-17 CN CN201910310625.0A patent/CN110412608A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| CN110412608A (zh) | 2019-11-05 |
| JP2019191109A (ja) | 2019-10-31 |
| US20190331769A1 (en) | 2019-10-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12135393B2 (en) | LiDAR device comprising a plurality of beam steering cells for steering a laser beam | |
| US11585902B2 (en) | Optical designs using cylindrical lenses for improved resolution in lidar systems | |
| US20250079806A1 (en) | Laser emitting unit and lidar device using the same | |
| JP7180145B2 (ja) | 発光素子アレイ、及び光計測システム | |
| US20220114835A1 (en) | Light-emitting device, optical device, and information processing device | |
| US20160266253A1 (en) | Distance measuring device and photodetector | |
| KR102873363B1 (ko) | 빅셀 어레이 및 이를 이용한 라이다 장치 | |
| JP2016188808A (ja) | レンジセンサとその部品 | |
| JP6748143B2 (ja) | 光センサおよび電子機器 | |
| TWI881986B (zh) | 發光元件及測距裝置 | |
| US20200274320A1 (en) | Light emitter, light emitting device, optical device, and information processing apparatus | |
| JP2021529973A (ja) | 構造高さを低くしたレーザー装置 | |
| JP2019075557A (ja) | 光源一体型光センシングシステム、及びそれを含む電子機器 | |
| JP2023099396A (ja) | 半導体発光素子、光源装置及び測距装置 | |
| TWI805824B (zh) | 低發散垂直空腔表面發射雷射及結合其之模組及主裝置 | |
| KR20230150331A (ko) | 고체 레이저 레이더 및 이를 사용한 탐지 방법 | |
| US20220115836A1 (en) | Light-emitting device, optical device, and information processing device | |
| US12481737B2 (en) | Light emitter, light emitting device, optical device, and information processing apparatus | |
| JP7510641B2 (ja) | 3次元センシングシステム | |
| US11418006B1 (en) | Integrated device for optical time-of-flight measurement | |
| US12567723B2 (en) | Light-emitting device, optical device, and information processing device | |
| KR20210121912A (ko) | 표면발광 레이저소자 및 이를 구비한 거리측정장치 | |
| JP2024120613A (ja) | 測距装置、測距方法及びプログラム | |
| KR20210116899A (ko) | 표면발광 레이저소자 및 이를 구비한 거리측정장치 | |
| WO2022196257A1 (ja) | 受光素子、光検出装置及び測定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190326 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200303 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200417 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200707 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200806 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6748143 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |