JP6798331B2 - 運転支援装置 - Google Patents
運転支援装置 Download PDFInfo
- Publication number
- JP6798331B2 JP6798331B2 JP2017014352A JP2017014352A JP6798331B2 JP 6798331 B2 JP6798331 B2 JP 6798331B2 JP 2017014352 A JP2017014352 A JP 2017014352A JP 2017014352 A JP2017014352 A JP 2017014352A JP 6798331 B2 JP6798331 B2 JP 6798331B2
- Authority
- JP
- Japan
- Prior art keywords
- lane
- road
- vehicle
- unit
- reliability
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Landscapes
- Image Processing (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
Description
<第1実施形態>
1.運転支援装置1の構成
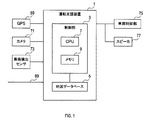
運転支援装置1の構成を図1〜図4に基づき説明する。運転支援装置1は車両に搭載される車載装置である。以下では、運転支援装置1を搭載する車両を自車両とする。図1に示すように、運転支援装置1は、制御部3と、地図データベース5と、を備える。
GPS69は自車両の位置を取得する。カメラ71は、図4に示すように、自車両79の前方の領域81を撮像して画像を作成する。この領域81には、自車両79の前方の道路が含まれる。カメラ71は、画像を運転支援装置1に出力する。カメラ71は、ステレオカメラでもよいし、単眼カメラでもよい。また、カメラ71の代わりに、ライダー(LIDAR)を用いてもよい。
運転支援装置1は、車載ネットワーク89に接続している。運転支援装置1は、車載ネットワーク89から、車両情報を取得することができる。車両情報として、例えば、自車両79の車速、ヨーレート等が挙げられる。車両情報は、後述する処理において適宜使用される。
運転支援装置1が所定時間ごとに繰り返し実行する処理を図3〜図7に基づき説明する。図5のステップ1では、他の車両判断ユニット25が、車両検出センサ73を用いて、自車両79の周辺に存在する他の車両(以下では周辺車両とする)を認識する処理を実行する。なお、この周辺車両には、他の車両のうち、自車両79と同じレーンを走行中であり、自車両79の前方に存在する他の車両(以下では前方車両とする)は含まれない。
ステップ4では、前記ステップ3の処理の結果に基づき、前方車両が存在するか否かを他の車両判断ユニット25が判断する。前方車両が存在しない場合はステップ5に進み、前方車両が存在する場合は本処理を終了する。
ステップ12では、道路環境取得ユニット21が、前記ステップ11で取得した自車両の位置と、地図データベース5に記憶された地図情報とを用いて、自車両の周辺における道路環境を取得する。取得する道路環境は、図4に示すように、自車両79よりも前方にある領域105での道路環境である。
3.運転支援装置1が奏する効果
(1A)運転支援装置1は、第1の信頼度と第2の信頼度とを対比し、第2の信頼度の方が第1の信頼度より高い場合は、第1のレーンから第2のレーンへのレーンチェンジを指示する。第2のレーンへレーンチェンジすると、第1のレーンを走行する場合よりも、道路区画線の認識における信頼度が高くなる。その結果、道路区画線の認識を誤ってしまうことを抑制できる。
<他の実施形態>
以上、本開示の実施形態について説明したが、本開示は上述の実施形態に限定されることなく、種々変形して実施することができる。
(2)前記ステップ6の後、すぐに前記ステップ10に進んでもよい。すなわち、前記ステップ7、8の処理は実行しなくてもよい。
Claims (4)
- 車両前方の道路区画線を認識する道路区画線認識ユニットと、
前記道路区画線認識ユニットによる道路区画線の認識における信頼度を推定する信頼度推定ユニットと、
前記車両が走行中である第1のレーンを区画する道路区画線の認識における前記信頼度と、前記第1のレーンに隣接する第2のレーンを区画する道路区画線の認識における前記信頼度とを対比する対比ユニットと、
前記第2のレーンを区画する道路区画線の認識における前記信頼度の方が、前記第1のレーンを区画する道路区画線の認識における前記信頼度よりも高いことを条件として、前記第2のレーンへのレーンチェンジを指示する指示ユニットと、
を備え、
前記道路区画線認識ユニットは、
道路を含む領域を表す画像を取得する画像取得ユニットと、
前記画像において特徴点を抽出する抽出ユニットと、
前記特徴点に基づき前記道路区画線を認識する認識処理ユニットと、
を備え、
前記信頼度推定ユニットは、
前記特徴点ごとに、その特徴点が道路区画線に起因する特徴点である尤度を複数の要素から総合的に算出する特徴点尤度算出ユニットと、
前記尤度に基づき、前記信頼度を推定する推定処理ユニットと、
を備える運転支援装置。 - 車両前方の道路区画線を認識する道路区画線認識ユニットと、
前記車両の位置を取得する位置取得ユニットと、
地図情報を記憶した地図データベースと、
前記位置取得ユニットで取得した前記車両の位置、及び、前記地図情報を用いて、前記車両の周辺における道路環境を取得する道路環境取得ユニットと、
前記道路環境取得ユニットで取得した前記道路環境が、予め設定された特定の道路環境であることを条件として、前記車両が走行中であるレーンから、他のレーンへのレーンチェンジを指示する指示ユニットと、
前記車両が走行中であるレーンの両側に他のレーンが存在するか否かを判断する両側レーン判断ユニットと、
を備え、
前記指示ユニットは、前記車両が走行中であるレーンの両側に他のレーンが存在すると前記両側レーン判断ユニットが判断した場合には、前記レーンチェンジを指示しないように構成された運転支援装置。 - 請求項2に記載の運転支援装置であって、
前記道路環境は、道路の構造、又は道路の形状を含む運転支援装置。 - 請求項1〜3のいずれか1項に記載の運転支援装置であって、
前記車両の周辺に他の車両が存在するか否かを判断する他の車両判断ユニットをさらに備え、
前記指示ユニットは、前記他の車両が存在すると前記他の車両判断ユニットが判断した場合には、前記レーンチェンジを指示しないように構成された運転支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017014352A JP6798331B2 (ja) | 2017-01-30 | 2017-01-30 | 運転支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017014352A JP6798331B2 (ja) | 2017-01-30 | 2017-01-30 | 運転支援装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018124641A JP2018124641A (ja) | 2018-08-09 |
| JP6798331B2 true JP6798331B2 (ja) | 2020-12-09 |
Family
ID=63109619
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017014352A Active JP6798331B2 (ja) | 2017-01-30 | 2017-01-30 | 運転支援装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6798331B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7016296B2 (ja) | 2018-06-29 | 2022-02-04 | シャープ株式会社 | 端末装置、基地局装置、および、通信方法 |
| CN114194187B (zh) * | 2020-08-28 | 2023-12-05 | 本田技研工业株式会社 | 车辆行驶控制装置 |
| CN113386773B (zh) * | 2021-07-30 | 2026-04-24 | 蔚来汽车科技(安徽)有限公司 | 视觉识别可靠度的判断方法及设备 |
| WO2024247160A1 (ja) * | 2023-05-31 | 2024-12-05 | 日産自動車株式会社 | 軌跡生成方法及び軌跡生成装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005165708A (ja) * | 2003-12-03 | 2005-06-23 | Nissan Motor Co Ltd | 車線追従装置 |
| JP2012226392A (ja) * | 2011-04-14 | 2012-11-15 | Honda Elesys Co Ltd | 運転支援システム |
| JP6410655B2 (ja) * | 2015-03-31 | 2018-10-24 | アイシン・エィ・ダブリュ株式会社 | 道路形状検出システム、道路形状検出方法及びコンピュータプログラム |
| JP6354659B2 (ja) * | 2015-05-19 | 2018-07-11 | 株式会社デンソー | 走行支援装置 |
-
2017
- 2017-01-30 JP JP2017014352A patent/JP6798331B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018124641A (ja) | 2018-08-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11288833B2 (en) | Distance estimation apparatus and operating method thereof | |
| US10956757B2 (en) | Image processing device, outside recognition device | |
| US11577724B2 (en) | Driving assistance apparatus | |
| US10147003B2 (en) | Lane detection device and method thereof, curve starting point detection device and method thereof, and steering assistance device and method thereof | |
| JP6666883B2 (ja) | 走行支援装置 | |
| EP2575078B1 (en) | Front vehicle detecting method and front vehicle detecting apparatus | |
| JP6889005B2 (ja) | 道路パラメータ推定装置 | |
| US10127460B2 (en) | Lane boundary line information acquiring device | |
| JP6787157B2 (ja) | 車両制御装置 | |
| US10192444B2 (en) | Forward collision warning system and method | |
| CN106573589A (zh) | 碰撞预测时间计算装置以及碰撞预测时间计算方法 | |
| JP6941178B2 (ja) | 自動運転制御装置及び方法 | |
| KR101687073B1 (ko) | 터널 높이 추정 장치 및 터널 높이 추정 방법 | |
| JP6798331B2 (ja) | 運転支援装置 | |
| US20170103272A1 (en) | Information processing device | |
| JP6354659B2 (ja) | 走行支援装置 | |
| JP2016009251A (ja) | 車両用制御装置 | |
| JP5233696B2 (ja) | レーン境界線検出装置、境界線検出プログラム、および逸脱警報装置 | |
| JP4913101B2 (ja) | 車両用道路形状検出装置 | |
| JP6608664B2 (ja) | 自車位置認識装置 | |
| US11458892B2 (en) | Image generation device and image generation method for generating a composite image | |
| US11453390B2 (en) | Driving support apparatus | |
| KR102697664B1 (ko) | 차량의 차선 유지 장치 및 그 제어 방법 | |
| JP6200780B2 (ja) | 車線認識判定装置 | |
| JP2018073049A (ja) | 画像認識装置、画像認識システム、及び画像認識方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190409 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200305 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200324 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200522 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201020 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201102 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6798331 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |