JP6801421B2 - クレーン - Google Patents
クレーン Download PDFInfo
- Publication number
- JP6801421B2 JP6801421B2 JP2016239918A JP2016239918A JP6801421B2 JP 6801421 B2 JP6801421 B2 JP 6801421B2 JP 2016239918 A JP2016239918 A JP 2016239918A JP 2016239918 A JP2016239918 A JP 2016239918A JP 6801421 B2 JP6801421 B2 JP 6801421B2
- Authority
- JP
- Japan
- Prior art keywords
- crane
- dimensional information
- range
- working range
- work
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Landscapes
- Closed-Circuit Television Systems (AREA)
- Control And Safety Of Cranes (AREA)
- Jib Cranes (AREA)
Description
そこで、本発明の目的は、複数のクレーンがいる搬送作業現場において、周囲の状況を容易に確認することができるクレーンを提供することを目的とする。
Claims (2)
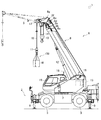
- 衛星測位システムが測定する現在位置を測定しながら、ブームに設けられる三次元情報取得手段を用いて作業現場の三次元情報を取得するクレーンであって、
前記三次元情報を表示可能な表示手段と、
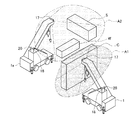
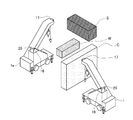
前記作業現場にある他のクレーンが取得する三次元情報を受信可能な通信手段と、を備え、
前記三次元情報取得手段を用いて一の三次元情報を取得し、
前記通信手段によって前記作業現場にある他のクレーンが取得する他の三次元情報を受信し、
前記一の三次元情報及び前記他の三次元情報を合成して、前記表示手段に表示し、
アウトリガの張出幅及び搬送物の重量に基づいて規定される最大作業半径と、前記ブームの最大伸長時の高さと、によって構成される一の最大作業範囲を算出可能に構成され、
前記通信手段は、前記他のクレーンが算出する他の最大作業範囲を受信可能に構成され、
前記一の最大作業範囲及び前記他の最大作業範囲を、前記表示手段に表示するクレーン。 - 現在のブーム長さ及び前記搬送物の重量に基づいて規定される旋回可能範囲及び起伏可能範囲によって構成される一の作業範囲を算出可能に構成され、
前記通信手段は、前記他のクレーンが算出する他の作業範囲を受信可能に構成され、
前記一の最大作業範囲及び前記他の最大作業範囲が重複している場合、前記一の作業範囲及び前記他の作業範囲を、前記表示手段に表示する請求項1に記載のクレーン。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016239918A JP6801421B2 (ja) | 2016-12-09 | 2016-12-09 | クレーン |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016239918A JP6801421B2 (ja) | 2016-12-09 | 2016-12-09 | クレーン |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018095376A JP2018095376A (ja) | 2018-06-21 |
| JP6801421B2 true JP6801421B2 (ja) | 2020-12-16 |
Family
ID=62632208
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016239918A Active JP6801421B2 (ja) | 2016-12-09 | 2016-12-09 | クレーン |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6801421B2 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7208815B2 (ja) * | 2019-02-14 | 2023-01-19 | 大成建設株式会社 | クレーン共用制御システム |
| JP7380685B2 (ja) * | 2019-05-22 | 2023-11-15 | 株式会社タダノ | 遠隔操作端末および遠隔操作端末を備える移動式クレーン |
| WO2020256106A1 (ja) * | 2019-06-20 | 2020-12-24 | 株式会社タダノ | 可動範囲表示システムおよび可動範囲表示システムを備えるクレーン |
| EP4036044B1 (en) * | 2019-09-27 | 2025-07-09 | Tadano Ltd. | Crane information display system |
| JP7369654B2 (ja) * | 2020-03-26 | 2023-10-26 | 株式会社タダノ | ガイド表示システムおよびこれを備えたクレーン |
| JP7343433B2 (ja) * | 2020-03-26 | 2023-09-12 | 株式会社タダノ | ガイド表示システムおよびこれを備えたクレーン |
| JP7443947B2 (ja) * | 2020-06-10 | 2024-03-06 | 株式会社タダノ | 作業車両の接触抑制装置および作業車両の接触抑制装置を有するブームを備えた作業車両 |
| KR102902978B1 (ko) * | 2020-07-27 | 2025-12-19 | 삼성중공업 주식회사 | 크레인의 가동 정보 생성 방법 및 장치 |
| CN114751309A (zh) * | 2022-01-29 | 2022-07-15 | 中冶赛迪工程技术股份有限公司 | 基于3d扫描的智能抓渣系统 |
| JP7805827B2 (ja) * | 2022-03-15 | 2026-01-26 | 株式会社タダノインフラソリューションズ | 荷役機械のブーム衝突防止装置 |
| US20260072196A1 (en) * | 2022-08-24 | 2026-03-12 | Nippon Telegraph And Telephone Corporation | Obstacle proximity detection device, obstacle proximity detection method, and obstacle proximity detection program |
| CN117671315A (zh) * | 2022-08-24 | 2024-03-08 | 广州广重企业集团有限公司 | 基于无线网络的车间安全检测方法以及系统 |
| JP7782704B2 (ja) * | 2022-08-24 | 2025-12-09 | Ntt株式会社 | 障害物近接検知装置、障害物近接検知方法、及び障害物近接検知プログラム |
| CN118004897B (zh) * | 2024-03-01 | 2025-07-25 | 中联重科股份有限公司 | 一种起重机安全识别方法、装置、系统及存储介质 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003118981A (ja) * | 2001-10-18 | 2003-04-23 | Hitachi Ltd | クレーン接近警報装置 |
| JP2014031223A (ja) * | 2012-08-01 | 2014-02-20 | Tadano Ltd | 作業範囲図および作業範囲図表示装置 |
| JP6481819B2 (ja) * | 2015-03-31 | 2019-03-13 | 株式会社タダノ | 移動式クレーンの表示装置及び移動式クレーンの同期装置。 |
-
2016
- 2016-12-09 JP JP2016239918A patent/JP6801421B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018095376A (ja) | 2018-06-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6801421B2 (ja) | クレーン | |
| JP6760030B2 (ja) | クレーン | |
| JP6776861B2 (ja) | 移動式クレーンの共吊り制御システム | |
| JP6888287B2 (ja) | クレーン | |
| JP6805781B2 (ja) | クレーン | |
| US20220063965A1 (en) | Crane | |
| JP6895835B2 (ja) | ガイド情報表示装置およびクレーン | |
| JP6805780B2 (ja) | クレーン | |
| JP7172199B2 (ja) | 遠隔操作端末及び作業車両 | |
| JP7199947B2 (ja) | 領域推定方法、計測領域表示システムおよびクレーン | |
| US20210253405A1 (en) | Crane | |
| WO2015145725A1 (ja) | 情報提示装置、クレーンシステム及び情報提示方法 | |
| US12032657B2 (en) | Ground surface estimation method, measurement area display system, and crane | |
| US12240735B2 (en) | Remote operation terminal and mobile crane provided with remote operation terminal | |
| WO2020256106A1 (ja) | 可動範囲表示システムおよび可動範囲表示システムを備えるクレーン | |
| JP2016193777A (ja) | クレーンの遠隔運転方法及びクレーンの遠隔運転装置 | |
| JP7268995B2 (ja) | 地表面推定方法、計測領域表示システムおよびクレーン | |
| JP2022179081A (ja) | 遠隔操作支援システム、遠隔操作支援装置 | |
| WO2020080434A1 (ja) | クレーン装置 | |
| JP2014169184A (ja) | 作業車の周囲情報取得装置 | |
| JP7501176B2 (ja) | 移動式クレーン | |
| JP7567559B2 (ja) | 設置位置表示システムおよび作業車両 | |
| JP7593213B2 (ja) | アウトリガ装置の設置位置表示システム及び作業車両 | |
| JP7167469B2 (ja) | 遠隔操作端末および遠隔操作端末を備える作業車両 | |
| JP7167464B2 (ja) | 遠隔操作端末および遠隔操作端末を備える作業車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191024 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200817 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200901 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201016 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201027 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201109 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6801421 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |