JP6818328B2 - 静電気測定装置 - Google Patents
静電気測定装置 Download PDFInfo
- Publication number
- JP6818328B2 JP6818328B2 JP2018193682A JP2018193682A JP6818328B2 JP 6818328 B2 JP6818328 B2 JP 6818328B2 JP 2018193682 A JP2018193682 A JP 2018193682A JP 2018193682 A JP2018193682 A JP 2018193682A JP 6818328 B2 JP6818328 B2 JP 6818328B2
- Authority
- JP
- Japan
- Prior art keywords
- detection electrode
- detection
- electrode
- charged object
- fan
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Landscapes
- Elimination Of Static Electricity (AREA)
Description
これら粉体や液滴等の粒子群は、粒子どうしの摩擦や、サイロや輸送管の内壁との摩擦によってプラスまたはマイナスに帯電しやすい。このような摩擦による帯電量が大きくなると、静電気放電をおこす場合がある。この放電が着火性放電であると、可燃性粉体やガス・蒸気等の着火源となり、爆発や火災の発生する原因になる。そこで、上記静電気測定装置は、粒子群などの帯電状態を継続的に測定し、上記の着火性放電が起こらないように監視するために用いられている。
そのため、この種の静電気測定装置は、自身が着火原因となることがないように、防爆対策がされていた。
上記検出電極2は、図6に破線で示すように複数の扇形板2aを備えた電極で、それらを結合した中心O1に導電体からなる回転軸4を取り付けている。そして、この回転軸4は絶縁性の連結部材5を介して電動モータ6に連結され、この電動モータ6の駆動力で検出電極2を回転させるようにしている。そして、上記回転軸4は検出回路7に電気的に接続されている。
さらに、上記導電体からなる回転軸4は、誘導電流を検出する検出回路7を介してアースに接続されている。したがって、検出電極2に誘導された電荷に応じて発生する誘導電流をこの検出回路7で検出することができる。
上記のようにした装置では、検出電極2が接地電極8によって帯電物体3との対向を遮断された位置から徐々にスリット8aの方に移動して、帯電物体3と検出電極2との対向面積が徐々に大きくなると、それに伴い検出電極2内の電荷が検出電極2の表面に誘導される。例えば、図7(a)に示すように帯電物体3の帯電電位の極性が正であって、検出電極2と帯電物体3とがスリット8aを介して対向すると、検出電極2の帯電物体3との対向面に検出電極2内の負の電荷が引き付けられる。このように負の電荷が帯電物体3に引き付けられれば、この負の電荷と等量の正の電荷が上記検出回路7側の面に誘導される。
また、図7(b)状態から検出電極2が移動して帯電物体3と検出電極2の対向面積が徐々に小さくなる過程では、接地電極8によって帯電物体3との対向が遮断された部分に引き付けられていた負の電荷がフリーになるので検出電極7側の正の電荷と中和する。そのため、図7(c)に示すように検出電極2の表面に誘導されていた誘導電荷が減少することになる。
上記のような検出電極2の検出回路7側表面に誘導される電荷の変化は図8に示すようになる。この図8は、検出電極2において検出回路7側の面に誘導される誘導電荷qを示したものである。そして、この誘導電荷qは検出電極2と帯電物体3との対向面積が最大のときにピーク値となり、対向面積が最小のとき最小値となり、その極性は帯電物体3の帯電極性と一致する。
この検出回数は、スリット8aの回転方向の間隔と検出電極2の回転数とで決まる。このように検出回数を多くするために、検出電極2と接地電極8とを相対回転させるようにしているのである。
上記のことからも明らかなように、誘導電流の検出精度は、検出電極2と接地電極8との相対回転数及びスリット8aの開口面積に依存する。
したがって、スリット8aの開口面積が小さければ誘導電流の検出精度が低くなってしまう。
なお、上記では帯電物体3の極性が正の場合について説明したが、帯電物体3が負の場合には、誘導電流の方向が上記とは反対になる。
このようにケーシング1の内圧を高く維持するために、ケーシング1に防爆用気体供給源9から高圧の気体を供給している。しかし、防爆用気体供給源9を設けたとしても、上記スリット8aの開口が大きければ、内圧を高くすることはできない。
なお、図5中符号10は圧力センサ、符号12は帯電物体3の帯電極性を判定する極性判定回路である。
この発明の目的は、例えば可燃性雰囲気のような防爆仕様を必要とするような環境でも使用でき、誘導電流の検出感度が高い静電気測定装置を提供することである。
なお、上記検出電極の扇形円は、半円であってもよいし、半円よりも小さい複数の扇形で形成されていてもよい。
また、検出電極と帯電物体との対向面積が最大となるのは、検出電極の扇形板と接地電極の扇形板との重なりがない状態、もしくは接地電極の扇形開口とが完全に重なった状態である。
このようにケーシング内の圧力を一定値以上に維持する必要がないので、例えば接地電極の開口面積を大きくして、その開口を介して検出電極と帯電物体とが対向する対向面積を十分に大きくすることができる。帯電物体との対向面積が大きくなれば、誘導電流値が大きくなって検出感度を上げることができる。
しかも、エアモータを用いることで検出回路等を本質安全防爆化するだけで、防爆構造の静電気測定装置を実現でき、この装置を防爆仕様が必要な環境でも用いることができる。
この第1実施形態は、円筒形のケーシング1の開口1a側に検出電極13が固定されている。
また、上記支持板14は円盤状でその外周がケーシング1の内壁に固定されている。この支持板14は、ケーシング1に対して固定されていればよく、その全外周がケーシング1の内壁に密着する必要はない。さらに、この支持板14に開口が形成されていてもよく、後で説明するエアモータ18や検出回路7などが設けられた空間とケーシング1の外部とが連通し、ケーシング1内に異物が侵入するようなことがあってもかまわない。
この接地電極15は、図3に示すように、外形を上記検出電極13と等しくした金属製の板部材である。つまり、検出電極13と同様に、複数の扇形板15aが回転方向に等間隔に配置されている。そして、この扇形板15aが、検出電極13の扇形板13aと一致する形状を備え、回転方向に隣り合う扇形板15aと15aとの間には、一点鎖線で示した扇形の空間部15bが介在し、この空間部15bは上記扇形板15a及び接地電極13の各扇形板13aと一致する。
そして、接地電極15の回転過程で、扇形板15aが扇形板13aと完全に重なったとき、帯電物体3と検出電極13との対向面積がゼロになり、上記空間部15bが検出電極13の扇形板13aと一致したとき、扇形板13aの全面積が帯電物体3との対向面積となる。
このように接地電極15の空間部15bと検出電極13とが重なったとき、検出電極13と帯電物体3との対向面積最大になり、検出電極13に誘導される誘導電荷qの量は最大になる。
その結果、上記空間部15bを介して対向する検出電極13と帯電物体3との対向面積を大きくすることができ、検出感度を高くすることができる。
そのため、帯電物体3の帯電極性を判定するためには、検出電極13と帯電物体3との対向面積が増加する過程を検出する必要がある。上記対向面積が増加する過程で検出された誘導電流Iの極性が帯電物体3の帯電極性と一致するからである。
この第1実施形態では、接地電極15と検出電極13との相対回転位置を検出するための回転位置センサ20を備え、その検出信号を、検出回路7からの誘導電流Iの検出信号とともに、極性判定回路12に入力するようにしている。
そして、極性判定回路12は、上記回転位置センサ20の検出信号から接地電極15の回転位置を特定し、検出電極13と帯電物体3との対向面積が増加する過程で検出回路7が検出した誘導電流Iの向き、すなわち検出値の極性に基づいて帯電物体3の極性を判定し、その結果を出力部11に出力するようにしている。
そして、ケーシング1内に導いた排気を、検出電極13の周囲に設けた図示しない排出孔から排出させれば、検出電極13の表面を上記排気流によって清掃することができる。
なお、ケーシング1内に導いた排気を、検出電極13の周囲から排出させる排出孔は、例えば検出電極13を支持する支持板14に形成したり、支持板14とケーシング1の内壁との間に隙間として設けたりすればよい。
例えば、帯電物体が流動する粉体などの場合、検出電極13側から噴出する排気流量が多いと、排気の噴出圧によって上記粉体が吹き飛ばされてしまい、誘導電流などの検出値が変化してしまうことがあるが、帯電物体の形態に応じて検出電極13の表面を清掃する排気流の流量を調整できれば、常に正確な測定ができることになる。
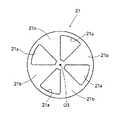
この接地電極21は、円盤状の金属板の中心03の周囲に、上記検出電極13の各扇形板13aと同形及び同一寸法を備えた扇形開口21aを形成したものである。そして、上記中心O3に導電性の回転軸16を取り付け、エアモータ18によってこの接地電極21を回転させるようにしている。
また、この第2実施形態の接地電極21は、全体形状が円盤状なので、第1実施形態のように複数の扇形板で羽根状にしたものと比べて、回転時に外周がぶれにくく、より安定して回転させることができる。接地電極21の回転にぶれがなければ、検出電極13と帯電物体3との対向面積にも誤差が発生することなく、検出値の再現性がより高くなる。
ただし、接地電極15の空間部15bや接地電極21の扇形開口21aの形状および寸法を検出電極13と一致させれば、検出電極13と帯電物体3との最大対向面積を検出電極13の面積と等しくすることができ、検出電極13の表面全体を帯電物体3と対向させることができる。
なお、上記実施形態では、測定装置を本質安全防爆とするために、ケーシング1内に設けられる検出回路7及び極性判定回路12を、微弱な電源で動作可能にするとともに、回路内の配線間での短絡が発生ないように設計している。
3 帯電物体
7 検出回路
12 極性判定回路
13 検出電極
15 接地電極
15b (接地電極の開口)空間部
18 エアモータ
20 回転位置センサ
21 接地電極
21a 開口
Claims (2)
- ケーシングと、
このケーシング内に設けられ、対向する帯電物体の帯電電位に応じて誘導される誘導電流を出力する検出電極と、
このケーシングにおいて上記検出電極と上記帯電物体との間に設けられた接地電極と、
上記検出電極と接地電極とを相対回転させるエアモータと、
上記検出電極と上記接地電極との相対位置を検出する回転位置センサと、
上記検出電極から出力される誘導電流を検出する検出回路と、
上記検出回路の信号と上記回転位置センサの信号とから極性を特定する極性判定回路と
が設けられ、
上記エアモータを駆動して上記検出電極と接地電極とを相対回転させ、その相対回転の過程で、上記検出電極と帯電物体との対向面積を一定の周期で変化させる静電気測定装置であって、
上記エアモータからの排気の一部もしくは全部を上記ケーシング内に導く導入部が設けられるとともに、上記導入部から導かれた上記排気を排出する排出孔が上記検出電極の周囲に形成された静電気測定装置。 - 上記検出電極が扇形板を備え、
上記接地電極には上記検出電極の扇形板と同一形状同一寸法の扇形板あるいは扇形開口のいずれか一方を備え、
上記検出電極と接地電極との相対回転の過程で、上記検出電極における扇形板の合計面積が、上記検出電極と帯電物体との対向面積の最大値になるとともに、
上記検出電極の扇形板の合計面積が、上記検出電極の外周が描く円の面積の二分の一になる寸法を保った請求項1に記載の静電気測定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018193682A JP6818328B2 (ja) | 2018-10-12 | 2018-10-12 | 静電気測定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018193682A JP6818328B2 (ja) | 2018-10-12 | 2018-10-12 | 静電気測定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020060529A JP2020060529A (ja) | 2020-04-16 |
| JP6818328B2 true JP6818328B2 (ja) | 2021-01-20 |
Family
ID=70219657
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018193682A Active JP6818328B2 (ja) | 2018-10-12 | 2018-10-12 | 静電気測定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6818328B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116338289B (zh) * | 2023-04-18 | 2025-09-16 | 淄博文广电气有限公司 | 一种物体表面带电非接触式检测装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS54107782A (en) * | 1978-02-10 | 1979-08-23 | Ricoh Co Ltd | Ac type surface electrometer making use of fan |
| JPS5984478U (ja) * | 1982-11-22 | 1984-06-07 | 川瀬 研一 | 静電気測定器 |
| JPS6329263A (ja) * | 1986-07-23 | 1988-02-06 | Saginomiya Seisakusho Inc | 直流電界測定装置 |
| US6608483B1 (en) * | 2001-11-13 | 2003-08-19 | John P. Hill | Quadrature differential charge commutation sensor enabling wide bandwith field mills and other electrostatic field measuring devices |
-
2018
- 2018-10-12 JP JP2018193682A patent/JP6818328B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020060529A (ja) | 2020-04-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5214386A (en) | Apparatus and method for measuring particles in polydispersed systems and particle concentrations of monodispersed aerosols | |
| KR101784905B1 (ko) | 회전 속도 검출 장치를 포함하는 정전 분무기 | |
| JP6818328B2 (ja) | 静電気測定装置 | |
| CN101680737A (zh) | 旋转电机传感器 | |
| US9189940B2 (en) | Method and apparatus for detecting smoke in an ion chamber | |
| JP6842328B2 (ja) | 真空ポンプ、主センサ、及び、ネジ溝ステータ | |
| JP2016118559A (ja) | 歯車セットの角度位置検出用の容量式装置を備えた電気機械装置および歯車セットの角度位置検出方法 | |
| EP3091564A1 (en) | Corona discharge assembly, ion mobility spectrometer, computer program, and storage medium | |
| JP2019027949A (ja) | 電界測定装置 | |
| CN109883909B (zh) | 一种粉尘浓度测量装置 | |
| Dinh et al. | Two-axis tilt angle detection based on dielectric liquid capacitive sensor | |
| CN100535674C (zh) | 小型三维电场传感器 | |
| US3754471A (en) | Pneumatic shaft speed sensor | |
| US12405202B2 (en) | Semiconductor device for particle measurement and method for operating the semiconductor device | |
| CN102236028B (zh) | 粉粒体的流动计测装置 | |
| US9163925B1 (en) | Electric field measurement apparatus | |
| Wang et al. | Representation of induced and transferred charge in the measurement signal from electrostatic sensors | |
| JP2018179900A (ja) | 電界強度計測装置 | |
| JP6718100B2 (ja) | 除電装置 | |
| US3224271A (en) | Mass flow meter using difference between torques | |
| JP2887744B2 (ja) | 静電気検知装置 | |
| TWI908147B (zh) | 物料接觸型粉體靜電監測裝置及檢測方法 | |
| JP2008096322A (ja) | 粒子分級装置 | |
| SU1303897A1 (ru) | Емкостный датчик дл измерени запыленности воздуха | |
| SU365647A1 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190801 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200825 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200915 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201021 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20201021 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20201021 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201201 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201218 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6818328 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |