以下、本発明をより詳細に説明するために、本発明を実施するための形態について、添付の図面に従って説明する。
実施の形態1.
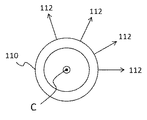
図1は、全体が100で表される、本発明の実施の形態1に係る人数計測装置の構成を示す概略図である。人数計測装置100は、人数計測が行われる場所である通路内の、人などの物体までの距離を測定する距離センサ110と、距離センサ110によって測定された距離データを用いて人の位置を算出する人位置算出部120と、人位置算出部120によって算出された人の位置の時間変化に基づいて、通路を通過した人の数を数える計数部130と、を含む。
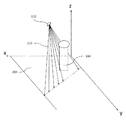
図2に示すように、距離センサ110は、回転軸Cに垂直な方向にレーザ光112を放射する。そして、距離センサ110は、レーザ光112を放射した時刻から、建物の構造物または人104などの物体によって反射されたレーザ光112が距離センサ110の位置まで戻って来た時刻までの時間を測定することによって、距離センサ110から物体までの距離を測定する。図2に示すように、距離センサ110は、レーザ光112の照射方向を回転軸Cを中心に回転させながら、レーザ光112をパルスとして断続的に照射し、断続的に物体までの距離を測定するスキャン型の距離センサである。このようにして、距離センサ110は、回転軸Cに垂直な平面上に存在する物体までの距離データを取得することができる。
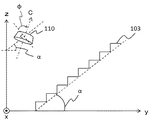
次に、距離センサ110の設置条件について説明する。図3A〜3Cは、本発明の実施の形態1に係る人数計測装置100による人数計測の実施状況を示す概略図である。実施の形態1では、人数計測装置100は、階段103またはエスカレータなどの階段状の通路において適用される。示されている例では、階段103の幅方向をx軸方向、x軸に垂直な鉛直方向(高さ方向)をz軸方向、x軸およびz軸に垂直な奥行き方向をy軸方向とする。階段103は、y軸方向に延びており、カーブしていない形状であるものとする。図3Aは、階段103を通過中の人104と、階段103および人104を含む通路に向けてレーザ光112を照射して距離を測定する距離センサ110とを、x軸方向から見た概略図であり、図3Bは、これらをz軸方向(上)から見た概略図であり、図3Cは、y軸方向から見た概略図である。
図3A〜3C、特に図3Cに示すように、距離センサ110は、距離センサ110の回転軸Cがxz平面に平行であり、かつz軸に対して第1の角度θを成すように、取り付けられる。以上の説明からわかるように、第1の角度θは、距離センサ110の回転軸Cがz軸方向(鉛直方向)を向くとき、0°である。言い換えれば、距離センサ110の回転軸Cは、z軸方向(鉛直方向)から、x軸の負方向に、第1の角度θだけ傾斜したものである。距離センサ110をこのように斜めに設置することによって、距離センサ110から放射されるレーザ光112は、レーザ光112が照射される物体のy方向の位置が同一である場合、x方向の位置すなわち階段103の幅方向の位置が異なると、異なる高さに到達することになる。したがって、距離センサ110は、x軸方向、すなわち階段103の幅方向の各位置に関して、実質的に異なる高さにおける距離データを取得する。これにより、人数計測装置100は、階段103上を隣接して同一方向に進んでいる人がいても、それぞれを異なる時刻に検出することができるため、それぞれの人を区別して検出することができる。
なお、本明細書において、「隣接」とは、歩行者の進行方向を見た場合に、歩行者が横に並んでいることを意味する。
例えば、第1の角度θは、階段103の横幅を分母とし、階段103の蹴上げの長さを分子とする値の逆正接である角度以上の角度とする。これにより、距離センサ110は、階段103のx軸方向の一方の端にいる一方の人と、当該一方の人とz軸方向に実質的に同じ位置におりかつx軸方向の他方の端にいる他方の人とを、z軸方向に1段分だけ、すなわち階段103の蹴上げの長さだけ異なる位置で検出することができる。したがって、当該一方の人と当該他方の人とを異なる時刻に検出することができるため、人数計測装置100は、それぞれの人を区別して検出することができる。
図4を参照して、距離センサ110の設置条件の一例について説明する。階段103の寸法の条件は、建築基準法に規定されている。例えば、居室の床面積の合計が200m2を超えるオフィスビルについては、階段103の横幅401は、1.2m以上でなければならない。また、踊場の高さ402は、4m以下でなければならない。
レーザ光112は、一般的に、階段103の下のフロアに立っている人104の身長より高い位置に照射される。なぜなら、第1に、人104の上からレーザ光112を照射することにより、隣接した人を区別して検出するという本発明の効果を発揮でき、また第2に、距離センサ110は、階段の下のフロアのみを移動中の人を検出せずに、階段103を昇降している人104のみを検出することが望ましいからである。このような観点から、レーザ光が照射される位置の最低位置の階段の下のフロアの床からの高さ403が決定される。具体的には、距離センサ110は、距離センサ110と通路面との距離が、人104の頭頂部と通路面との間の距離よりも大きくなるような位置に配置される。
なお、文献<総務省 統計局,“年齢別 都市階級別 設置者別 身長・体重の平均値及び標準偏差”,学校保健統計調査>によれば、身長が2m以上である人の比率は17歳以下の男女ともに0.0%である。したがって、距離センサ110は、高さ403が2m以上となるように構成されれば、本発明はほぼ全ての歩行者の検出に適用できると考えられる。また、上記文献によれば、身長が1.35m以上である人の比率は17歳以下の男女ともに100.0%である。したがって、高さ403が1.35m以上になるように構成されれば、本発明はある一定数の歩行者の検出に適用できると考えられる。
さらに、図5に示すように、距離センサ110の回転軸Cは、一般的に、階段103の通路面に垂直な方向を基準として、距離センサ110の中心を通るx軸に平行な軸の周りに、y軸をz軸に一致させる方向に、第2の角度φだけ回転したものである。ここで、「通路面」とは、幅方向と、幅方向に垂直な移動方向と、を含む面をいう。実施の形態1では、「通路面」は、階段103の各段の踏面と蹴上げとが交わる線を実質的に通る面であり、図5に示す例では、水平面(xy平面)をx軸方向の周りに、y軸をz軸に一致させる方向に、勾配角度αだけ回転させた平面である。
言い換えれば、距離センサ110の回転軸Cは、一般的に、通路面に垂直な方向からy軸方向(移動方向)に第2の角度φだけ傾斜したものである。
実施の形態1では、第2の角度φは、距離センサ110の回転軸Cがzx平面内にあるように設定される。以上の関係から、実施の形態1では、第2の角度φと階段103の勾配角度αとの間には、次の式(1)が成立する。
距離センサ110は、例えば市販のレーザスキャナであってもよい。人位置算出部120および計数部130は、メモリに記憶されたプログラムを実行するプロセッサにより実現することができる。プロセッサは、CPUまたはシステムLSIなどの処理回路である。また、複数のプロセッサおよび複数のメモリが連携して上記機能を実現してもよい。
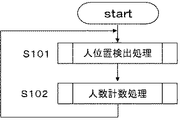
次に、実施の形態1に係る人数計測装置100による人数計測プロセスについて説明する。図6は、実施の形態1に係る人数計測装置100による人数計測プロセスを示すフローチャートである。まず、人位置算出部120は、距離センサ110が測定した各走査角度n方向における物体までの距離データに基づいて、人の位置を算出する(ステップS101)。ここで、走査角度nは、回転軸Cの周りの距離センサ110の回転角度であり、第1の角度θが0°の場合であって、走査角度nが0°であるときは、レーザ光112は、距離センサ110からx軸方向に照射されるものとする。計数部130は、通路を通過した人の数を計数する(ステップS102)。計数部130は、通過人数を通過方向ごとに計数することもできる。人数計測装置100は、図5のフローチャートの処理を一定時間毎、例えば100msごとに繰返し実行する。
図7は、人位置算出部120による図6のステップS101の人位置算出処理の詳細を示すフローチャートである。ステップS101の人位置算出処理は、以下のステップS201〜S214を含む。
まず、ステップS201について説明する。距離センサ110が測定した各走査角度nにおける距離データと、人104が階段103上にいないときに取得した当該走査角度nにおける距離データである背景データとを比較する。人104が階段103上にいる場合、距離センサ110が測定した距離データは、人104が階段103上にいるという情報を含む。ある走査角度nにおいて、距離データが背景データと等しい場合は、距離データは人104を検出したデータを含まない不要なデータであるといえるため、以後のデータ処理の対象から除外する。したがって、以後のデータ処理は、背景データと異なる距離データに対してのみに行われる。
次に、ステップS202について説明する。ステップS202では、距離データの座標は、以下の手順で極座標系から直交座標系に変換される。レーザ光112が距離センサ110から水平面内(xy平面に平行な平面内)に照射される場合、すなわち、第1の角度θが0°であり、かつ第2の角度φも0°である場合、レーザ光112の照射方向uを、走査角度nを用いて、次の式(2)で表すことができる。
式(2)において、基底ベクトルは、それぞれx、y、z軸方向である。実施の形態1では、距離センサ110は、回転軸Cが第1の角度θを有するように設置される。したがって、距離センサ110の回転軸Cは、z軸方向(鉛直方向)から、y軸方向の周りに第1の角度θだけ回転している。このときのレーザ光112の照射方向uθは、次の式(3)となる。
走査角度nの場合に距離センサ110によって測定された物体までの距離がrであるとき、距離センサ110から物体までの距離データは、距離センサ110が原点にあるものとして、式(4)によって直交座標系の座標データとして表される。
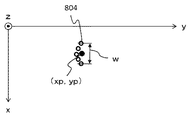
次に、ステップS203について説明する。図8Aは、階段103を上から見た概略図であり、階段103の上に立っている人104を概略的に示している。ステップS201とステップS202において距離センサ110によって測定された距離センサ110から人104までの距離データは、図8Bに示すように、複数の座標データ804として表される。ステップS203では、この複数の座標データ804は、ミーンシフト法を用いてクラスタリングされる。クラスタリングの結果、図8Cに示すように、複数の座標データ804は、点(xp,yp)に収束する。本明細書では、この収束した点を収束点と呼ぶ。また、人位置算出部120は、複数の座標データ804のうちx座標が最大であるもののx座標と、x座標が最小であるもののx座標との差を、座標データ804に関する横幅wとして算出する。代わりに、横幅wは、複数の座標データ804のうち最も距離が離れた2点間の距離として算出されてもよい。
次に、図7のステップS204について説明する。ステップS203において算出された収束点には、人を検出した座標データによるもののみならず、雑音を検出した座標データによるものも含まれる可能性がある。そこで、雑音データを除去するため、ステップS204では、人位置算出部120は、収束点に関する座標データ804の横幅wが所定の閾値T204以上であるか否かを判定する。閾値T204は、例えば0.3mである。文献<産総研,“人体寸法データベース”>によれば、男の肩峰幅の平均と標準偏差は、それぞれ約0.40m、約0.02mであり、女の肩峰幅の平均と標準偏差は、それぞれ約0.36m、約0.02mであるため、0.3mは妥当な数字といえる。ステップS204の判定の結果がYesである場合、人104が検出されたといえ、ステップS205に進み、判定の結果がNoである場合、図6のステップS101の人位置算出処理を終了して、図6のステップS102に進む。
次に、図7のステップS205について説明する。関連するデータの横幅wが所定の閾値T204以上であった収束点につき、次の表1のようにその位置と横幅を対応させて記憶する。
表1では、各収束点には、対応する項番が付けられ、項番1の収束点の位置は(xp1,yp1)、横幅はw1とする。項番2以降の収束点についても、同様の符号が付される。
次のステップS206では、項番が付された収束点のうちの1つが選択され、ステップS207に進む。
次に、ステップS207について説明する。人位置算出部120は、ステップS206で選択された収束点に対応する人104が、前回の測定時刻においても検出されていたか否かを判定する。具体的には、前回の測定時刻における人104の収束点のうち、今回の測定時刻における人104の収束点に最も距離が近いものから、今回の測定時刻における人104の収束点までの距離が、所定の閾値T207以下であるか否かを判定する。閾値T207は、例えば0.3mである。ステップS207の判定結果がNoであるときは、ステップS208に進み、Yesであるときは、S209に進む。
次に、ステップS208について説明する。今回の測定時刻における人104の収束点が新たに検出された人の位置を表すものとして、これに固有の人の項番を割り当て、次の表2のように、この固有の人の項番に対応する位置と横幅を対応させて記憶する。
表2では、今回の測定時刻をt1、t1における人104の収束点に割り当てられた固有の人の項番をp1としている。
次に、ステップS209について説明する。ステップS209では、人位置算出部120は、前回の測定時刻における人104の収束点と、今回の測定時刻における人104の収束点とが、同一の1人の人104を測定した結果であるか否かを判定する。具体的には、人位置算出部120は、今回の測定時刻における人104の収束点に関連する横幅が、「ステップS207において前回の測定時刻においても検出されていたと判定された人104の横幅+閾値T209」以下であるか否かを判定する。閾値T209は、例えば0.3mである。ステップS209の判定結果がYesのとき、両収束点は、同一の1人の人104に対応するものであるとして、ステップS210に進む。Noのとき、収束点は、複数の人104に対応するものであるとして、ステップS212に進む。
次に、ステップS210について説明する。ステップS207において前回の測定時刻においても検出されていたと判定された人104の情報に、今回の測定時刻と、今回の測定時刻における同一の人104に対応する収束点の位置と、横幅と、を追加して記憶する。表3は、ステップS210の処理を行う前における、前回までの測定時刻と、前回までの各測定時刻における人104に対応する収束点の位置と、横幅と、を記憶している表の一例である。表3には、前回の時刻t0に検出された2人の人104の情報が記憶されている。2人の人104には、それぞれを識別する項番p2とp3が付されている。表3には、各人が初めて検出された測定時刻から前回の時刻t0までの各時刻における収束点の位置が全て記憶されている。横幅については、前回の時刻t0における横幅が記憶されている。
表4は、ステップS210の処理を行った後における、今回までの測定時刻と、今回までの各測定時刻における人104に対応する収束点の位置と、横幅と、を記憶している表の一例である。表4には、今回の測定時刻t1において、項番p2に対応する人が検出されたものとして、その情報が追加されている。すなわち、表3と比較して、表4には、人の項番p2について、今回の測定時刻t1と、収束点の位置(xp2_1,yp2_1)とが新たに記憶され、また、横幅は、新たに算出されたw2aに更新されている。以上のステップS210における処理の後、ステップS211に進む。
次に、ステップS211について説明する。ステップS211では、全ての収束点(表1の例では、3つある)に対して処理を行ったか否かを判定する。判定結果がYesであれば、人位置算出処理(ステップS101)を終了し、Noであれば、ステップS206に戻る。
次に、ステップS212について説明する。前述の通り、ステップS212は、ステップS209の判定結果がNoである場合に開始される。ステップS212では、今回の測定時刻における座標データのうち、ステップS207において前回の測定時刻にも検出されていたとされた人104の横幅の範囲内にあるデータのみに対して、再びミーンシフト法を適用し、収束点の位置と横幅を新たに記憶する。
以下、図9A〜図9Cを参照して、ステップS212の詳細な処理方法について説明する。図9Aは、階段103の上にx方向に並んで立っている人104aと104bとを概略的に示す図である。ステップS201とステップS202において距離センサ110によって測定された距離センサ110から人104a、104bまでの距離データは、図9Bに示すように、複数の座標データ904として表される。この複数の座標データ904は、ステップS203のミーンシフト法を用いたクラスタリングの結果、点(xp4,yp4)に収束する。複数の座標データ904から、横幅w4も算出される。横幅w4は、ステップS209で、複数の人に関する座標データの横幅であると判定されている。そこで、図9Cに示すように、ステップS207において前回の測定時刻にも検出されていたとされた人104の横幅をw4aとして、複数の座標データ904(図9B)のうち、横幅w4aの範囲内の座標データ904aのみに対して再びミーンシフト法を用いてクラスタリングを行う。このクラスタリングの結果、収束点の位置は(xp4a,yp4a)となる。ステップS212では、この収束点の位置と横幅w4aを、新たな項番に対応させて記憶する。表5は、表1に新たな収束点の位置と横幅を追加した表である。表5では、新たな収束点の項番は、4とされている。記憶が完了すると、S213へ進む。
次に、ステップS213について説明する。複数の座標データ904(図9B)のうち、図9Cの横幅w4aの範囲内の座標データ904aを除いた残りの座標データ904bの横幅w4bが、所定の閾値T213以上であるか否かを判定する。閾値T213は、例えば0.3mである。ステップS213の判定結果がYesである場合、残りの座標データ904bも、人を検出した座標データであることを意味する。この場合、ステップS214に進む。ステップS213の判定結果がNoである場合、残りの座標データ904bは、人ではなく雑音などを検出した座標データであることを意味する。この場合、再度ステップS206に進む。
次に、ステップS214について説明する。ステップS214では、人位置算出部120は、残りの座標データ904bにミーンシフト法を用いてクラスタリングを行い、次の表6のように、新たな収束点の位置と横幅を記憶する。表6には、表5と比較して、新たな収束点が項番5として追加されている。記憶が完了すると、再度ステップS206に進む。
以上、人位置算出部120による図6のステップS101の人位置算出処理について述べた。次に、人位置算出部120による図6のステップS102の人数計数処理の詳細を説明する。図10は、ステップS102の人数計数処理の詳細を示すフローチャートである。ステップS102の人数計数処理は、以下のステップS301〜S304を含む。
まず、ステップS301について説明する。ステップS301では、計数部130は、前回の時刻における測定では検出されていたが、今回の時刻における測定では検出されていない人がいるか否かを判定する。つまり、計数部130は、測定対象領域である通路を通過し終えた人がいるか否かを判定する。ステップS301の判定結果がYesである場合、ステップS302に進み、Noである場合、人数計数処理は終了する。
ステップS302では、通路を通過し終えた人のうちの1人が選択され、ステップS303に進む。
ステップS303では、計数部130は、選択された人が進行していた方向が登り方向であるか否かを判定する。判定をするために、ステップS101の人位置算出処理において記憶された、人の位置の時系列データが使用される。具体的には、対象領域である通路において人を初めて検出した起点と、最後に検出した終点のデータとを使用して、起点から終点の方向に人が通過したと判定する。ステップS303の判定結果がYesである場合、ステップS304に進み、Noである場合、ステップS305に進む。
ステップS304では、計数部130は、登り方向の通過人数をカウントする。すなわち、登り方向の通過人数を1増加させる。その後、ステップS306に進む。
ステップS305では、計数部130は、下り方向の通過人数をカウントする。すなわち、下り方向の通過人数を1増加させる。その後、ステップS306に進む。
なお、方向別の通過人数をカウントする目的は、例えば、建物内のある区画から他の区画へ、例えばある階から別の階へ、行き来する人の数を計測することにある。本発明は、商業ビル、鉄道施設その他の施設の中の区画間の移動人数を把握することができるため、例えば施設内のリレイアウトを計画する際に有用である。
ステップS306では、通路を通過し終えた人全員に対して処理を終了したか否かを判定する。ステップS306の結果がYesである場合、人数計数処理は終了し、Noである場合、再びステップS302に進む。
以下、本発明の実施の形態1に係る人数計測装置100の動作の具体例を示す。まず、1人の人104が階段103を通過する場合について説明する。図11Aは、対象領域である階段103をy軸方向に見た図、図11Bは上から見た図であり、共に時刻t1、t2、t3およびt4における人104の位置を概略的に示している。時間は、時刻t1から、t2、t3へと順に経過し、図中の最後の時刻はt4である。この具体例では、人104は、階段を登っている。
図11Cは、図11Aおよび図11Bの人104を測定することによって得られた座標データ1104を示している。t=t1のとき、人104は、距離センサ110の走査範囲内まで進んでいないため、距離センサ110によって検出されておらず、したがって座標データ1104は得られていない。t=t2、t3のとき、人104は距離センサ110によって検出され、座標データ1104が得られている。t=t4のとき、人104は、距離センサ110の走査範囲を通り過ぎているため、距離センサ110によって検出されず、したがって座標データ1104は得られない。
図11Dは、ステップS203で図11Cの座標データ1104から得られた人104の位置と横幅を示している。t=t1のとき、座標データ1104は得られていないため、位置と横幅も得られない。t=t2のとき、人104の位置(x5_2,y5_2)と横幅w5_2が算出される。t=t3のとき、人104の位置(x5_3,y5_3)と横幅w5_3が算出される。t=t4のとき、座標データ1104は得られていないため、位置と横幅も得られず、人104の追跡が終了する。次に、ステップS102の人数計数処理によって、階段103を通過した人数が計数される。人104が初めて検出された起点位置(x5_2,y5_2)から、最後に検出された終点位置(x5_3,y5_3)への方向は、y軸方向の正方向である。この方向は階段103の登り方向であるから、計数部130は、ステップS304において、登り方向の通過人数をカウントする。
次に、隣接した2人の人が階段103を通過する場合について説明する。図12Aは、対象領域である階段103をy軸方向に見た図、図12Bは上から見た図であり、共に時刻t1、t2、t3およびt4における、隣接した2人の人104a、104bの位置を概略的に示している。時間は、時刻t1から、t2、t3へと順に経過し、図中の最後の時刻はt4である。この具体例では、2人の人104a、104bは、階段を登っている。
図12Cは、図12Aおよび図12Bの人104a、104bを測定することによって得られた座標データ1204a、1204bを示している。t=t1のとき、人104aは距離センサ110によって検出され、座標データ1204aが得られるが、人104bは、距離センサ110の走査範囲内まで進んでいないため、距離センサ110によって検出されておらず、したがって座標データ1204bは得られていない。t=t2、t3のとき、2人の人104a、104bは、共に距離センサ110によって検出され、座標データ1204a、1204bが得られる。t=t4のとき、人104aは、距離センサ110の走査範囲を通り過ぎているため、距離センサ110によって検出されず、したがって座標データ1204aは得られない。他方、人104bは距離センサ110によって検出され、座標データ1204bが得られる。
図12Dは、ステップS203で図12Cの座標データ1204a、1204bから得られた人104a、104bのそれぞれの位置と横幅を示している。
t=t1のとき、人104aの位置(x6a_1,y6a_1)と横幅w6a_1が算出される。
t=t2のとき、座標データ1204aおよび1204bに対してミーンシフト法を用いてクラスタリングを行うと、図9Bのように1点に収束することがある。この場合、ステップS209、S212〜S214を経由して、座標データ1204aおよび1204bをt=t1のときの人104aの横幅w6a_1の範囲内の座標データと、この範囲外の残りの座標データとに分割し、分割されたそれぞれの座標データに対して再度ミーンシフト法を用いてクラスタリングを行う。これにより、人104aの位置(x6a_2,y6a_2)および横幅w6a_2と、人104bの位置(x6b_2,y6b_2)および横幅w6b_2と、が得られる。
t=t3のとき、同様に、人104aの位置(x6a_3,y6a_3)および横幅w6a_3と、人104bの位置(x6b_3,y6b_3)および横幅w6b_3と、が得られる。
t=t4のとき、人104bの位置(x6b_4,y6b_4)および横幅w6b_3と、が得られる。人104aの座標データ1204aは検出されないため、人104aの追跡は終了する。人104aの追跡が終了したので、人数計数処理が実行される。人104aが初めて検出された起点位置(x6a_1,y6a_1)から、最後に検出された終点位置(x6a_3,y6a_3)への方向は、y軸方向の正方向である。この方向は階段103の登り方向であるから、計数部130は、ステップS304において、登り方向の通過人数をカウントする。
なお、その後、人104bについても、追跡が終了した時点で人数計数処理が実行される。
以上のように、本発明の実施の形態1に係る人数計測装置100により、複数人が隣接している場合であっても、対象領域である階段103の通過人数を高い精度で計測することができる。
次に、進行方向に対して前後に近接した2人の人が階段103を通過する場合について説明する。図13Aは、対象領域である階段103をy軸方向に見た図、図13Bは上から見た図であり、共に時刻t1、t2、t3およびt4における、前後に近接した2人の人104a、104bの位置を概略的に示している。時間は、時刻t1から、t2、t3へと順に経過し、図中の最後の時刻はt4である。この具体例では、2人の人104a、104bは、階段を登っている。
図13Cは、図13Aおよび図13Bの人104a、104bを測定することによって得られた座標データ1304a、1304bを示している。t=t1、t2のとき、人104aのみが距離センサ110によって検出され、座標データ1304aが得られる。人104bは、距離センサ110の走査範囲内まで進んでいないため、距離センサ110によって検出されておらず、したがって座標データ1304bは得られていない。t=t3、t4のとき、人104bの座標データ1304bが得られる。人104aは、人104bによって距離センサ110からのレーザ光112が遮蔽されるため、距離センサ110によって検出されておらず、したがって座標データ1304aは得られていない。
図13Dは、ステップS203で図13Cの座標データ1304a、1304bから得られた人104a、104bのそれぞれの位置と横幅を示している。t=t1のとき、人104aの位置(x7a_1,y7a_1)と横幅w7a_1が算出される。t=t2のとき、人104aの位置(x7a_2,y7a_2)と横幅w7a_2が算出される。
t=t3のとき、人104bの位置(x7b_3,y7b_3)と横幅w7b_3が算出される。他方で、人104aの座標データ1304aは検出されないため、人104aの追跡は終了する。人104aの追跡が終了したので、人数計数処理が実行される。人104aが初めて検出された起点位置(x7a_1,y7a_1)から、最後に検出された終点位置(x7a_2,y7a_2)への方向は、y軸方向の正方向である。この方向は階段103の登り方向であるから、計数部130は、ステップS304において、登り方向の通過人数をカウントする。
t=t4のとき、人104bの位置(x7b_4,y7b_4)と横幅w7b_4が算出される。
なお、その後、人104bについても、追跡が終了した時点で人数計数処理が実行される。
以上のように、本発明の実施の形態1に係る人数計測装置100により、複数人が進行方向に対して前後に近接している場合であっても、対象領域である階段103の通過人数を1台の距離センサ110で高い精度で計測することができる。
以上で述べたように、本発明の実施の形態1に係る人数計測装置100では、距離センサ110が第1の角度θを有するように設置されるため、距離センサ110のレーザ光112は、x方向の位置すなわち階段103の幅方向の位置が異なると、階段103の異なる高さの部分に到達する。これにより、人が隣接している場合であっても、それぞれの人を時間差をもって、区別して検出することができ、高い精度で対象領域である階段103の通過人数を計数することができる。
また、距離センサ110の設置位置を所定の高さの位置、典型的には人の身長よりも高い位置に設置することによって、複数人が進行方向に対して前後に近接している場合であっても、それぞれの人を時間差をもって、区別して検出することができ、対象領域である階段103の通過人数を高い精度で計測することができる。
実施の形態2.
図14は、全体が200で表される、本発明の実施の形態2に係る人数計測装置の構成を示す概略図である。図14中、図1と同一の符合は、同一または相当箇所を示す。また、以下の記載では、原則として、実施の形態1と異なる点を中心に説明し、その他の部分については重複説明を省略する。人数計測装置200は、距離センサ110と、人位置算出部220と、計数部130と、を含む。
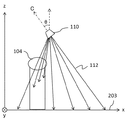
図15A〜15Dは、本発明の実施の形態2に係る人数計測装置200による人数計測の実施状況を示す概略図である。実施の形態2では、人数計測装置200は、平坦な通路に適用される。したがって、本発明の実施の形態2では、「通路面」は通路に一致する。通路203の幅方向をx軸方向、x軸に垂直な鉛直方向(高さ方向)をz軸方向、x軸およびz軸に垂直な奥行き方向をy軸方向とする。図15Aは、通路203を通過中の人104と、通路203および人104を含む通路に向けてレーザ光112を照射して距離を測定する距離センサ110と、を示す概略的な斜視図である。図15Bは、これらをx軸方向から見た概略図であり、図15Cは、z軸方向(上)から見た概略図であり、図15Dは、y軸方向から見た概略図である。
図15A〜15D、特に図15Dに示すように、距離センサ110は、距離センサ110の回転軸Cがz軸に平行な方向と第1の角度θを成すように、所定の高さの位置、例えば人の身長より高い位置に、取り付けられる。さらに、図15Bに示すように、距離センサ110の回転軸Cは、z軸方向(鉛直方向)に平行な位置から、y軸方向に、第2の角度φだけ傾斜している。実施の形態2では、第2の角度φは、0°より大きくなるように設定される。言い換えれば、距離センサ110のレーザ光112は、俯角をもって照射される。
次に、実施の形態2に係る人数計測装置200による人数計測プロセスについて説明する。人位置算出部220は、対象領域である通路203を通過する人の位置を算出する。実施の形態2における人位置算出部220による人位置算出処理は、ステップS202aを除いて、実施の形態1のステップS201、S203〜S214と同一である。そこで、以下、ステップS202aについて説明する。
実施の形態2におけるステップS202aは、実施の形態1のステップS202と比較して、距離センサ110の設置条件が異なるため、直交座標系への変換の方法が異なる。レーザ光112が距離センサ110から水平面内(xy平面に平行な平面内)に照射される場合、すなわち、第1の角度θが0°であり、かつ第2の角度φも0°である場合、レーザ光112の照射方向uを、走査角度nを用いて、次の式(5)で表すことができる。
式(5)において、基底ベクトルは、それぞれx、y、z軸方向である。実施の形態2では、距離センサ110は、上記のように、回転軸Cが第1の角度θおよび第2の角度を有するように設置される。したがって、距離センサ110の回転軸Cは、z軸方向(鉛直方向)から、x軸の負方向へ第1の角度θだけ傾斜し、y軸方向(移動方向)に第2の角度φだけ傾斜している。ベクトルを第1の角度θだけ回転させる行列Rθ、および第2の角度φだけ回転させる行列Rφを式(6)、(7)に示す。
RθとRφを用いて、レーザ光112の照射方向uθφは、次の式(8)で表される。
走査角度nの場合に距離センサ110によって測定された物体までの距離がrであるとき、距離センサ110から物体までの距離データは、距離センサ110が原点にあるものとして、式(9)によって直交座標系の座標データとして表される。
以上のように、本発明の実施の形態2では、距離センサ110は、第1の角度θのみならず、第2の角度φをも有するため、勾配のない平坦な通路203を通過する人を検出することができる。そして、実施の形態1と同様に第1の角度θを有するため、進行方向に対して前後に近接している人を時間差をもって、区別して検出することができ、高い精度で対象領域である通路203の通過人数を計数することができる。
実施の形態3.
図16は、全体が300で表される、本発明の実施の形態3に係る人数計測装置の構成を示す概略図である。図16中、図1と同一の符合は、同一または相当箇所を示す。また、以下の記載では、原則として、実施の形態1、2と異なる点を中心に説明し、その他の部分については重複説明を省略する。人数計測装置300は、距離センサ110と、人位置算出部320と、計数部130と、を含む。
図17、18は、本発明の実施の形態3に係る人数計測装置300による人数計測の実施状況を示す概略図である。実施の形態3では、人数計測装置300は、階段103に適用される。階段103の幅方向をx軸方向、x軸に垂直な鉛直方向(高さ方向)をz軸方向、x軸およびz軸に垂直な奥行き方向をy軸方向とする。図17、18は、階段103を通過中の人104と、階段103および人104を含む通路に向けてレーザ光112を照射して距離を測定する距離センサ110とを、x軸方向から見た概略図である。
実施の形態3では、距離センサ110は、実施の形態2の場合と同様に、距離センサ110の回転軸Cがz軸に平行な方向と第1の角度θを成すように、所定の高さの位置、例えば人の身長より高い位置に、取り付けられる。さらに、距離センサ110の回転軸Cは、階段103の通路面に垂直な方向から、y軸方向(移動方向)に、第2の角度φだけ傾斜したものである。図17は、距離センサ110を階段の下のフロアに設置した場合の図であり、図18は、上のフロアに設置した場合の図である。
次に、実施の形態3に係る人数計測装置300による人数計測プロセスについて説明する。人位置算出部320は、対象領域である階段103を通過する人の位置を算出する。施の形態3における人位置算出部320による人位置算出処理は、ステップS202bを除いて、実施の形態1のステップS201、S203〜S214と同一である。そこで、以下、ステップS202bについて説明する。
実施の形態3におけるステップS202bは、実施の形態1のステップS202と比較して、距離センサ110の設置条件が異なるため、直交座標系への変換の方法が異なる。実施の形態2の場合と同様に考えて、以下の式(10)によって直交座標系の座標データを得ることができる。
なお、鉛直方向(z軸方向)と距離センサ110の回転軸Cとが成す仰俯角Φと、第2の角度φとの間には、距離センサ110を階段の下のフロアに設置した場合には次の式(11)の、上階側に設置した場合には次の式(12)の関係がある。
以上のように、本発明の実施の形態3では、距離センサ110は、第1の角度θのみならず、第2の角度φをも有するため、距離センサ110の設置条件の自由度を高くすることができる。例えば、距離センサ110を階段の下のフロアのみならず上のフロアに設置することができ、また、距離センサ110を壁のみならず天井にも設置することができる。
実施の形態4.
図19は、全体が400で表される、本発明の実施の形態4に係る人数計測装置の構成を示す概略図である。図19中、図1と同一の符合は、同一または相当箇所を示す。また、以下の記載では、原則として、実施の形態1、2、3と異なる点を中心に説明し、その他の部分については重複説明を省略する。人数計測装置400は、距離センサ110と、人位置算出部420と、計数部130と、を含む。
図20は、本発明の実施の形態4に係る人数計測装置400による人数計測の実施状況を示す概略図である。実施の形態4では、人数計測装置400は、階段103またはエスカレータなどの階段状の通路において適用される。階段103の幅方向をx軸方向、x軸に垂直な鉛直方向(高さ方向)をz軸方向、x軸およびz軸に垂直な奥行き方向をy軸方向とする。図20は、階段103を通過中の人104と、階段103および人104を含む通路に向けてレーザ光112を照射して距離を測定する距離センサ110とを、x軸方向から見た概略図である。
図20と図3Aとを比較するとわかるように、実施の形態4と実施の形態1は、距離センサ110が設置される位置の高さのみが異なる。すなわち、実施の形態4では、距離センサ110は、人の身長より低い位置に取り付けられてもよい。実施の形態4では、距離センサ110は、実施の形態1の場合と同様に、距離センサ110の回転軸Cがz軸に平行な方向と第1の角度θを成すように取り付けられる。
距離センサ110が人の身長より低い位置に取り付けられても、階段103上を隣接して同一方向に進んでいる人の区別は可能である。これは、距離センサ110の回転軸Cが第1の角度θを成すように設置されるためである。例えば、隣接した2人の人が階段103を登っている場合、一方の人の距離センサ110による検出が先に終了し、その後、他方の人の検出が終了する。このように、検出が順次終了するため、人数計測装置400は、検出された座標データが2人の人によるものと判断することができる。また、例えば、隣接した2人の人が階段103を降りている場合、一方の人の距離センサ110による検出が先に開始され、その後、他方の人の検出が開始される。このように、検出が順次開始するため、人数計測装置400は、検出された座標データが2人の人によるものと判断することができる。
以上のように、本発明の実施の形態4に係る人数計測装置400は、人が隣接している場合であっても、それぞれの人を時間差をもって、区別して検出することができる。なお、階段103上に2人の人が隣接している例について説明したが、2人以上の人が隣接している場合についても同様である。また、本発明の実施の形態4に係る人数計測装置400は、階段103のみならず、平坦な通路にも適用することができる。